Recognition: no theorem link
Edge-Cloud Collaborative Pothole Detection via Onboard Event Screening and Federated Temporal Segmentation
Pith reviewed 2026-05-12 02:09 UTC · model grok-4.3
The pith
A vehicle-cloud system screens vibration data onboard then uses federated segmentation to spot potholes while cutting transmission volume.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
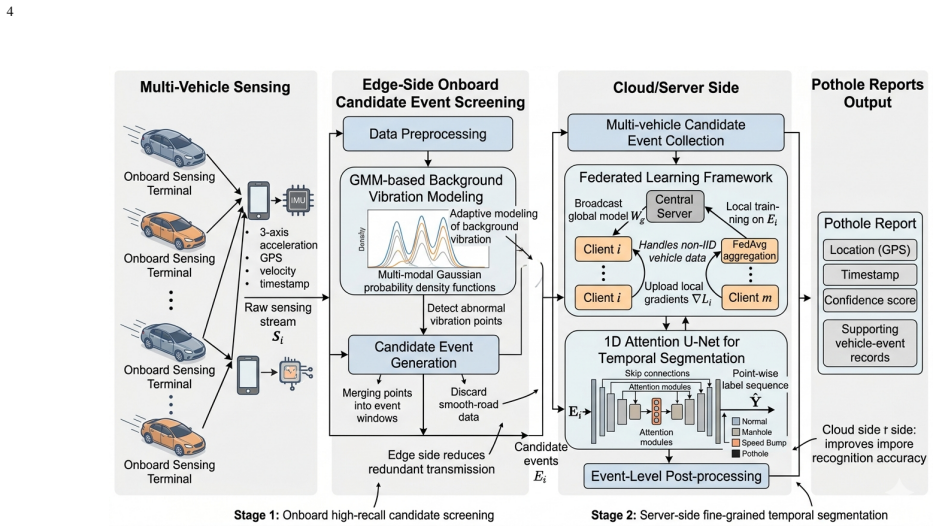
The authors claim that an edge-cloud pipeline, with a Gaussian Mixture Model screening candidate segments at the vehicle and a 1D Attention U-Net performing point-wise temporal segmentation at the server, reduces unnecessary transmissions from smooth segments and raises fine-grained pothole detection performance under both centralized training and federated learning across non-IID vehicle data.
What carries the argument
The central mechanism is the two-stage pipeline: a GMM-based onboard high-recall filter that extracts compact candidate event segments from continuous streams, followed by server-side 1D Attention U-Net temporal segmentation that classifies each time sample as pothole or non-pothole while preserving boundaries.
If this is right
- Only compact candidate segments reach the server, so bandwidth use drops sharply on long stretches of smooth pavement.
- The segmentation model learns to mark exact start and end points of potholes even when they resemble speed bumps or manholes in the time series.
- Federated training lets the model improve from data collected by many vehicles without any vehicle sending its raw acceleration records.
- The same pipeline works in both centralized and federated modes, showing the architecture is compatible with privacy-preserving deployments.
Where Pith is reading between the lines
- The screened events could be paired with GPS to build live pothole maps for maintenance crews without extra hardware.
- If the temporal features generalize, the same segmentation stage might flag other road defects such as cracks or loose gravel.
- Over time the federated model could reveal systematic differences in road wear between vehicle types or neighborhoods.
Load-bearing premise
The GMM filter must catch nearly all actual potholes and the segmentation network must separate potholes from similar vibrations using only temporal patterns.
What would settle it
A field test on labeled multi-vehicle vibration traces in which the system either misses more than a small fraction of verified potholes or transmits nearly as much data as the raw stream.
Figures






read the original abstract
Road potholes threaten driving safety and increase infrastructure maintenance costs, while large-scale and timely pothole detection remains challenging in urban road networks. Vehicle-mounted vibration sensing offers a low-cost and scalable solution, however, continuous transmission of raw acceleration streams causes high communication overhead. Also, vibration patterns induced by potholes are often confused with those caused by manholes, speed bumps, and other local road structures. To address these challenges, this paper proposes an edge-cloud collaborative pothole detection framework based on onboard vibration event screening and federated temporal segmentation. At the vehicle side, a Gaussian Mixture Model (GMM)-based module adaptively models background vibration and screens candidate abnormal events from continuous acceleration streams. The onboard module acts as a lightweight high-recall filter and uploads only compact candidate event segments with their contextual information. At the server side, pothole detection is formulated as a point-wise temporal segmentation task. A 1D Attention U-Net is developed to distinguish potholes from vibration-similar road events by capturing multi-scale temporal features and preserving event boundary information. Furthermore, the model is trained under a federated learning framework to exploit distributed multi-vehicle data while accommodating non-IID vehicle data distributions. Experiments on multi-vehicle vibration sensing data show that the proposed framework reduces unnecessary data transmission from smooth road segments and improves fine-grained pothole detection under both centralized and federated settings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an edge-cloud collaborative pothole detection framework using vehicle-mounted vibration sensing. A GMM-based onboard module screens candidate abnormal events from continuous acceleration streams as a lightweight high-recall filter, uploading only compact segments. At the server, pothole detection is cast as point-wise temporal segmentation solved by a 1D Attention U-Net that captures multi-scale features and event boundaries; the model is trained via federated learning to exploit distributed multi-vehicle data while handling non-IID distributions. The abstract asserts that experiments on multi-vehicle data demonstrate reduced unnecessary transmissions from smooth segments and improved fine-grained detection in both centralized and federated settings.
Significance. If the empirical claims hold, the work could meaningfully advance low-cost, scalable road monitoring by cutting communication overhead in large vehicle fleets and improving discrimination of potholes from similar vibration events through temporal modeling and federated collaboration.
major comments (2)
- [Abstract] Abstract: the central claim that 'experiments ... show that the proposed framework reduces unnecessary data transmission ... and improves fine-grained pothole detection' is unsupported by any quantitative results, baselines, dataset descriptions, metrics (e.g., recall, F1, transmission ratio), error bars, or validation protocols in the available text. This absence is load-bearing for the soundness of the empirical contribution.
- [Abstract] Abstract: the weakest assumption—that the GMM screening preserves high recall for true potholes while the 1D Attention U-Net can reliably separate potholes from manholes and speed bumps using only temporal features—receives no supporting evidence, ablation, or performance numbers, leaving the detection-accuracy claim unverified.
minor comments (1)
- [Abstract] Abstract: the federated-learning description would be clearer if it briefly indicated the aggregation method or non-IID mitigation technique employed.
Simulated Author's Rebuttal
We thank the referee for the careful review and constructive comments on the abstract. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'experiments ... show that the proposed framework reduces unnecessary data transmission ... and improves fine-grained pothole detection' is unsupported by any quantitative results, baselines, dataset descriptions, metrics (e.g., recall, F1, transmission ratio), error bars, or validation protocols in the available text. This absence is load-bearing for the soundness of the empirical contribution.
Authors: The abstract is intended as a high-level summary. The full manuscript contains a dedicated Experiments section with quantitative results on multi-vehicle vibration sensing data. These include dataset descriptions, metrics such as recall, F1-score and transmission reduction ratios, baseline comparisons, error bars, and validation protocols under both centralized and federated settings that directly support the claims of reduced unnecessary transmissions from smooth segments and improved fine-grained detection. We will revise the abstract to incorporate key quantitative highlights from the experiments. revision: yes
-
Referee: [Abstract] Abstract: the weakest assumption—that the GMM screening preserves high recall for true potholes while the 1D Attention U-Net can reliably separate potholes from manholes and speed bumps using only temporal features—receives no supporting evidence, ablation, or performance numbers, leaving the detection-accuracy claim unverified.
Authors: The full manuscript provides supporting evidence and ablations in the Experiments section. The GMM screening is shown to achieve high recall as a lightweight filter, while the 1D Attention U-Net demonstrates improved boundary-aware segmentation performance in distinguishing potholes from temporally similar events (manholes, speed bumps) using only vibration features. Results are reported for both centralized and federated training. We will revise the abstract to reference these key performance numbers and ablations. revision: yes
Circularity Check
No circularity: standard components applied to pothole task
full rationale
The abstract describes an applied framework that combines a GMM-based onboard filter, 1D Attention U-Net for temporal segmentation, and federated learning. No equations, derivations, predictions, or self-citations appear in the provided text. Experimental claims rest on external multi-vehicle data rather than any quantity defined in terms of itself or fitted parameters renamed as outputs. The derivation chain is empty, so no reduction to inputs by construction is possible.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Pothole vibrations produce distinguishable temporal patterns from other road structures such as manholes and speed bumps.
Reference graph
Works this paper leans on
-
[1]
Embedded solution for road condition monitoring using vehicular sensor networks,
A. Mednis, A. Elsts, and L. Selavo, “Embedded solution for road condition monitoring using vehicular sensor networks,” in2012 6th in- ternational conference on application of information and communication technologies (AICT). IEEE, 2012, pp. 1–5
work page 2012
-
[2]
Nericell: Rich monitor- ing of road and traffic conditions using mobile smartphones,
P. Mohan, V . N. Padmanabhan, and R. Ramjee, “Nericell: Rich monitor- ing of road and traffic conditions using mobile smartphones,” inACM Conference on Embedded Network Sensor Systems (SenSys), 2008, pp. 323–336
work page 2008
-
[3]
The pothole patrol: Using a mobile sensor network for road surface monitoring,
J. Eriksson, L. Girod, B. Hull, R. Newton, S. Madden, and H. Balakr- ishnan, “The pothole patrol: Using a mobile sensor network for road surface monitoring,” inInternational Conference on Mobile Systems, Applications, and Services (MobiSys), 2008, pp. 29–39
work page 2008
-
[4]
Road condition monitoring using smart sensing and artificial intelligence: A review,
E. Ranyal, A. Sadhu, and K. Jain, “Road condition monitoring using smart sensing and artificial intelligence: A review,”Sensors, vol. 22, no. 8, p. 3044, 2022
work page 2022
-
[5]
CRSM: a practical crowdsourcing- based road surface monitoring system,
K. Chen, G. Tan, M. Lu, and J. Wu, “CRSM: a practical crowdsourcing- based road surface monitoring system,”Wirel. Networks, vol. 22, no. 3, pp. 765–779, 2016
work page 2016
-
[6]
Road condition monitoring using on-board three-axis accelerometer and GPS sensor,
K. Chen, M. Lu, X. Fan, M. Wei, and J. Wu, “Road condition monitoring using on-board three-axis accelerometer and GPS sensor,” inInternational ICST Conference on Communications and Networking in China, 2011, pp. 1032–1037
work page 2011
-
[7]
Road anomaly detection through deep learning approaches,
D. Luo, J. Lu, and G. Guo, “Road anomaly detection through deep learning approaches,”IEEE Access, vol. 8, pp. 117 390–117 404, 2020
work page 2020
-
[8]
Roads: A road pavement monitoring system for anomaly detection using smart phones,
F. Seraj, B. J. Van Der Zwaag, A. Dilo, T. Luarasi, and P. Havinga, “Roads: A road pavement monitoring system for anomaly detection using smart phones,” inInternational workshop on modeling social media. Springer, 2014, pp. 128–146
work page 2014
-
[9]
CRSM: crowdsourcing based road surface monitoring,
K. Chen, M. Lu, G. Tan, and J. Wu, “CRSM: crowdsourcing based road surface monitoring,” inInternational Conference on High Performance Computing and Communications & IEEE International Conference on Embedded and Ubiquitous Computing, 2013, pp. 2151–2158
work page 2013
-
[10]
A deep learning approach to automatic road surface monitoring and pothole detection,
B. Varona, A. Monteserin, and A. Teyseyre, “A deep learning approach to automatic road surface monitoring and pothole detection,”Personal and Ubiquitous Computing, vol. 24, no. 4, pp. 519–534, 2020
work page 2020
-
[11]
Assessment of road surface con- ditions using machine learning,
R. Anand, S. Priyanka, and P. G. Goud, “Assessment of road surface con- ditions using machine learning,”Journal of Transportation Engineering and Its Applications, vol. 10, no. 1, 2025
work page 2025
-
[12]
Edge ai-based automated detection and classification of road anomalies in vanet using deep learning,
R. Bibi, Y . Saeed, A. Zeb, T. M. Ghazal, T. Rahman, R. A. Said, S. Abbas, M. Ahmad, and M. A. Khan, “Edge ai-based automated detection and classification of road anomalies in vanet using deep learning,”Computational intelligence and neuroscience, vol. 2021, no. 1, p. 6262194, 2021
work page 2021
-
[13]
A novel method based on unet for bearing fault diagnosis
D. K. Soother, I. H. Kalwar, T. Hussain, B. S. Chowdhry, S. M. Ujjan, and T. D. Memon, “A novel method based on unet for bearing fault diagnosis.”Computers, Materials & Continua, vol. 69, no. 1, 2021
work page 2021
-
[14]
Elevator vibration signal denoising by deep residual u-net,
P. Xie, L. Zhang, M. Li, S. F. S. Lau, and J. Huang, “Elevator vibration signal denoising by deep residual u-net,”Measurement, vol. 225, p. 113976, 2024
work page 2024
-
[15]
W. Shan, M. Wang, J. Xia, J. Chen, Q. Li, L. Xing, R. Zhang, M. Wang, S. Zhang, and X. Zhang, “U-tss: a novel time series segmentation model based u-net applied to automatic detection of interference events in geomagnetic field data,”PeerJ Computer Science, vol. 11, p. e2678, 2025
work page 2025
-
[16]
Attention U-Net: Learning Where to Look for the Pancreas
O. Oktay, J. Schlemper, L. L. Folgoc, M. Lee, M. Heinrich, K. Misawa, K. Mori, S. McDonagh, N. Y . Hammerla, B. Kainz, B. Glocker, and D. Rueckert, “Attention u-net: Learning where to look for the pancreas,” arXiv preprint arXiv:1804.03999, 2018
work page internal anchor Pith review arXiv 2018
-
[17]
CBAM: Convolutional block attention module,
S. Woo, J. Park, J. Lee, and I. S. Kweon, “CBAM: Convolutional block attention module,” inProceedings of the European Conference on Computer Vision, ser. ECCV 2018, 2018, pp. 3–19
work page 2018
-
[18]
Communication-efficient learning of deep networks from decentralized data,
B. McMahan, E. Moore, D. Ramage, S. Hampson, and B. A. y Arcas, “Communication-efficient learning of deep networks from decentralized data,” inArtificial intelligence and statistics. PMLR, 2017, pp. 1273– 1282
work page 2017
-
[19]
Privacy preserving federated learning for full heterogeneity,
K. Chen, X. Zhang, X. Zhou, B. Mi, Y . Xiao, L. Zhou, Z. Wu, L. Wu, and X. Wang, “Privacy preserving federated learning for full heterogeneity,” ISA Transactions, vol. 141, pp. 73–83, 2023
work page 2023
-
[20]
Federated machine learning: Concept and applications,
Q. Yang, Y . Liu, T. Chen, and Y . Tong, “Federated machine learning: Concept and applications,”ACM Trans. Intell. Syst. Technol., vol. 10, no. 2, pp. 12:1–12:19, 2019
work page 2019
-
[21]
Federated optimization in heterogeneous networks,
T. Li, A. K. Sahu, M. Zaheer, M. Sanjabi, A. Talwalkar, and V . Smith, “Federated optimization in heterogeneous networks,” inProceedings of Machine Learning and Systems, vol. 2, 2020, pp. 429–450
work page 2020
-
[22]
Federated deep learning for anomaly detection in the internet of things,
X. Wang, Y . Wang, Z. Javaheri, L. Almutairi, N. Moghadamnejad, and O. S. Younes, “Federated deep learning for anomaly detection in the internet of things,”Computers and Electrical Engineering, vol. 108, p. 108651, 2023
work page 2023
-
[23]
B. Shubyn, D. Mrozek, T. Maksymyuk, V . Sunderam, D. Kostrzewa, P. Grzesik, and P. Benecki, “Federated learning for anomaly detection in industrial iot-enabled production environment supported by autonomous guided vehicles,” inInternational Conference on Computational Science. Springer, 2022, pp. 409–421
work page 2022
-
[24]
Federated learning-based anomaly detection with isolation forest in the iot-edge continuum,
H. Xiang, X. Zhang, X. Xu, A. Beheshti, L. Qi, Y . Hong, and W. Dou, “Federated learning-based anomaly detection with isolation forest in the iot-edge continuum,”ACM Transactions on Multimedia Computing, Communications and Applications, 2024
work page 2024
-
[25]
Satprobe: Low-energy and fast indoor/outdoor detection via satellite existence sensing,
K. Chen and G. Tan, “Satprobe: Low-energy and fast indoor/outdoor detection via satellite existence sensing,”IEEE Trans. Mob. Comput., vol. 20, no. 3, pp. 1198–1211, 2021
work page 2021
-
[26]
Multi-lane pothole detection from crowdsourced undersampled vehicle sensor data,
A. Fox, B. V . Kumar, J. Chen, and F. Bai, “Multi-lane pothole detection from crowdsourced undersampled vehicle sensor data,”IEEE Transac- tions on Mobile Computing, vol. 16, no. 12, pp. 3417–3430, 2017
work page 2017
-
[27]
Bikegps: Localizing shared bikes in street canyons with low-level GPS cooperation,
K. Chen and G. Tan, “Bikegps: Localizing shared bikes in street canyons with low-level GPS cooperation,”ACM Trans. Sens. Networks, vol. 15, no. 4, pp. 45:1–45:28, 2019
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.