Recognition: unknown
COSMIC: Concurrent Optimization of Structure, Material, and Integrated Control for robotic systems
Pith reviewed 2026-05-14 20:37 UTC · model grok-4.3
The pith
A gradient-based framework co-optimizes robot topology, material distribution, and control policy to discover superior locomotion.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
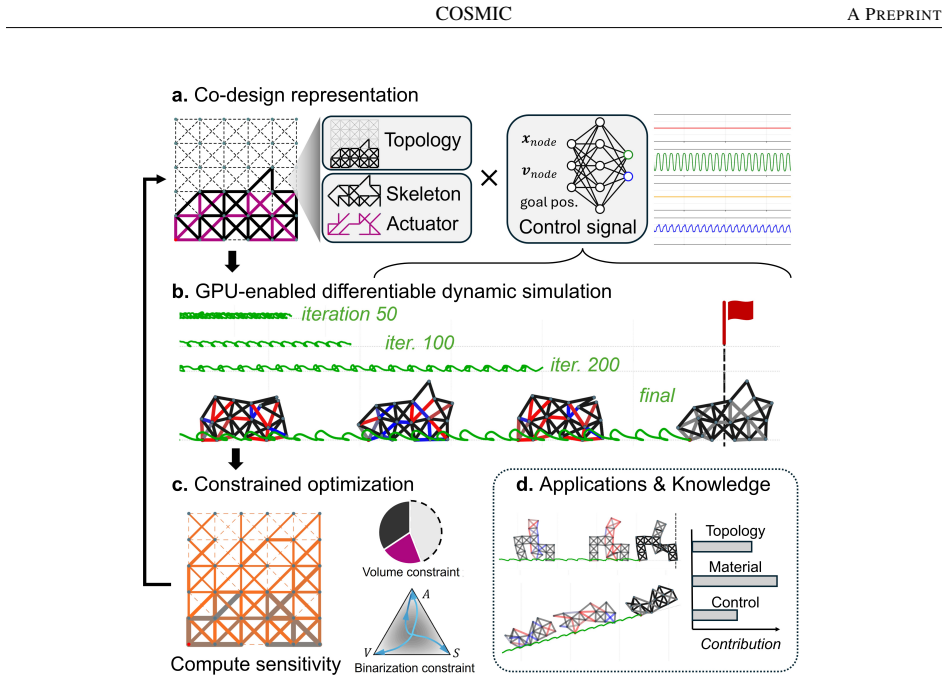
The framework simultaneously optimizes the topology, material distribution, and control policy of a truss-lattice robot by embedding mixed-type variables into a continuous design space, integrating a neural network controller within a differentiable simulator, and applying constrained optimization to navigate the non-convex landscape, consistently discovering diverse locomotion strategies that outperform baselines obtained through separated design.
What carries the argument
Gradient-based concurrent optimization that embeds mixed topological and material variables continuously and couples them to a neural controller inside a differentiable simulator.
If this is right
- The method produces diverse locomotion strategies that exceed performance from separate optimization of structure, material, and control.
- The same framework adapts to varied functional requirements and boundary conditions.
- Extracted insights reveal both individual and collective contributions of topology, material, and control to overall robot performance.
- The approach supplies a computational route toward autonomous co-design of robots capable of reconfiguration and complex behaviors.
Where Pith is reading between the lines
- If the simulator matches physical behavior closely enough, the method could directly generate printable robot designs without extensive manual iteration.
- The co-design loop might extend to other robot morphologies and tasks where structure and control are strongly coupled.
- Design insights from the framework could inspire new manual heuristics that account for interactions among the three entities.
Load-bearing premise
The differentiable simulator must accurately capture the coupled physical effects of topology, material distribution, and control without large gaps from real-world dynamics or fabrication limits.
What would settle it
Building and testing a physical prototype of one optimized design and observing locomotion performance that falls short of or fails to match the simulated results would falsify the practical value of the co-design.
Figures








read the original abstract
Replicating and surpassing the autonomy of natural organisms remains a long-standing goal in robotics. Yet most robotic systems have their structure, materials, and control designed separately, in sharp contrast to the co-evolution in nature. This separation often leads to suboptimal designs, and we still have a limited understanding of the individual and collective contributions of these design entities. In this work, we propose a gradient-based co-design framework that simultaneously optimizes the topology, material distribution, and control policy of a truss-lattice robot. The framework embeds mixed-type topological and material variables into a continuous design space and integrates a neural network controller within a differentiable simulator, capturing their interactions and enabling efficient gradient calculation via automatic differentiation. Furthermore, we develop a constrained optimization to navigate the highly non-convex design landscape and jointly optimize all design entities. Case studies demonstrate that the proposed framework consistently discovers diverse locomotion strategies that outperform baselines obtained through separated design. The framework is also flexible to accommodate different functional requirements and boundary conditions. Using this framework, we further extract design insights that reveal the individual and collective effects of different entities on robotic performance. The proposed framework provides a computational foundation for the autonomous co-design of robotic systems, capable of reconfiguration, locomotion, and other complex autonomous behaviors.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents COSMIC, a gradient-based co-design framework for truss-lattice robots that simultaneously optimizes topology, material distribution, and neural-network control policies. Design variables are relaxed to a continuous space inside a differentiable simulator; automatic differentiation supplies gradients, and a constrained optimizer navigates the resulting non-convex landscape. Case studies on locomotion tasks report that the co-optimized designs discover diverse gaits and outperform baselines obtained by sequential structure-then-control optimization; the framework is also shown to accommodate varying boundary conditions and to yield interpretable design insights.
Significance. If the reported performance margins prove robust, the work supplies a concrete computational route to integrated robotic design that mirrors biological co-evolution. The use of end-to-end differentiability for mixed discrete-continuous variables is a clear technical strength and could accelerate exploration of high-dimensional design spaces that remain intractable under separate optimization pipelines.
major comments (2)
- [§4] §4 (Case Studies) and associated tables/figures: the central claim that co-optimized designs “consistently outperform” separated-design baselines rests on simulation results whose quantitative metrics, error bars, ablation controls, and post-processing discretization steps are not reported; without these the magnitude and reliability of the claimed advantage cannot be assessed.
- [§3.2] §3.2 (Differentiable Simulator): the forward model relaxes topology and material variables to continuous parameters and back-propagates through contact and actuation; no sensitivity analysis, friction-model validation, or comparison against measured truss-lattice dynamics is supplied, yet every performance margin and design insight depends on the fidelity of this model.
minor comments (2)
- [§3.3] The description of the constrained optimizer (Eq. (X) in §3.3) would benefit from an explicit statement of how the penalty or barrier parameters are scheduled across iterations.
- [Figures] Figure captions for locomotion trajectories should include the numerical values of the final optimized material and topology parameters for direct reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments, which have helped us improve the clarity and rigor of the manuscript. We address each major comment point by point below and have revised the paper accordingly.
read point-by-point responses
-
Referee: [§4] §4 (Case Studies) and associated tables/figures: the central claim that co-optimized designs “consistently outperform” separated-design baselines rests on simulation results whose quantitative metrics, error bars, ablation controls, and post-processing discretization steps are not reported; without these the magnitude and reliability of the claimed advantage cannot be assessed.
Authors: We agree that the original presentation of results lacked sufficient statistical detail. In the revised manuscript we now report mean performance metrics with standard-error bars computed over 10 independent optimization runs with different random seeds. We have added an ablation study that isolates the contribution of concurrent optimization versus sequential structure-then-control pipelines, including paired t-tests for statistical significance. The post-processing discretization procedure (thresholding of relaxed density and material variables followed by connectivity filtering) is now described in detail in §4.1 with pseudocode and sensitivity checks on the threshold value. revision: yes
-
Referee: [§3.2] §3.2 (Differentiable Simulator): the forward model relaxes topology and material variables to continuous parameters and back-propagates through contact and actuation; no sensitivity analysis, friction-model validation, or comparison against measured truss-lattice dynamics is supplied, yet every performance margin and design insight depends on the fidelity of this model.
Authors: We acknowledge the importance of simulator fidelity. The revised §3.2 now contains a sensitivity analysis on friction coefficient, contact stiffness, and actuation bandwidth, showing that the discovered gaits remain qualitatively consistent across a ±20 % parameter range. We have added a validation subsection that compares simulated truss-lattice deformation under gravity and periodic forcing against published experimental data from the literature on similar lattice structures. Direct physical experiments with fabricated prototypes lie outside the current simulation-centric scope; we explicitly note this limitation and outline it as future work. revision: partial
Circularity Check
No significant circularity in co-optimization framework
full rationale
The paper defines a differentiable simulator embedding continuous relaxations of topology/material variables plus a neural controller, then applies gradient descent and constrained optimization to maximize a performance objective. Case-study results compare this joint optimization against separated-design baselines run inside the identical simulator; the outperformance claim is therefore a direct numerical comparison of two optimization procedures rather than a self-referential fit or renamed input. No load-bearing self-citations, uniqueness theorems, or ansatzes imported from prior author work appear in the derivation. The framework is self-contained against its own simulation benchmark.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Physical interactions among structure, material, and control can be accurately captured inside a differentiable simulator
Reference graph
Works this paper leans on
-
[1]
Katherine Fu, Diana Moreno, Maria Yang, and Kristin L. Wood. Bio-Inspired Design: An Overview Investigating Open Questions From the Broader Field of Design-by-Analogy.Journal of Mechanical Design, 136(111102), October 2014
2014
-
[2]
Morphological design methodolo- gies of soft robots.The Innovation Informatics, 1(1):100012, 2025
Beijia Zhang, Jie Shen, Zhenyu He, Qingyue Wu, Jing Xiong, and Zeyang Xia. Morphological design methodolo- gies of soft robots.The Innovation Informatics, 1(1):100012, 2025
2025
-
[3]
Truby, John William Boley, Timothy J
Arda Kotikian, Ryan L. Truby, John William Boley, Timothy J. White, and Jennifer A. Lewis. 3D Printing of Liquid Crystal Elastomeric Actuators with Spatially Programed Nematic Order.Advanced Materials, 30(10):1706164, 2018
2018
-
[4]
A review on reprogrammable bistable structures.Smart materials and structures, 33(9):093001, 2024
Chao Zhang, Xiaofeng Yin, Rongchu Chen, Kaiwen Ju, Yinxuan Hao, Tong Wu, Jian Sun, Huxiao Yang, and Yan Xu. A review on reprogrammable bistable structures.Smart materials and structures, 33(9):093001, 2024
2024
-
[5]
Webster-Wood, and Lining Yao
Jianzhe Gu, Ziwen Ye, Tucker Rae-Grant, Shuhong Wang, Ding Zhao, Josiah Hester, Victoria A. Webster-Wood, and Lining Yao. Optimization and control of actuator networks in variable geometry truss systems using genetic algorithms.Nature Communications, 16(1):8432, September 2025. 16 COSMICA PREPRINT
2025
-
[6]
A review on locomotion robophysics: the study of movement at the intersection of robotics, soft matter and dynamical systems.Reports on Progress in Physics, 79(11):110001, sep 2016
Jeffrey Aguilar, Tingnan Zhang, Feifei Qian, Mark Kingsbury, Benjamin McInroe, Nicole Mazouchova, Chen Li, Ryan Maladen, Chaohui Gong, Matt Travers, Ross L Hatton, Howie Choset, Paul B Umbanhowar, and Daniel I Goldman. A review on locomotion robophysics: the study of movement at the intersection of robotics, soft matter and dynamical systems.Reports on Pr...
2016
-
[7]
Robots that evolve on demand.Nature Reviews Materials, 9(11):822–835, November 2024
Robert Baines, Frank Fish, Josh Bongard, and Rebecca Kramer-Bottiglio. Robots that evolve on demand.Nature Reviews Materials, 9(11):822–835, November 2024
2024
-
[8]
Macrae Montgomery, Masato Tanaka, Liang Yue, Changyoung Yuhn, Yuki Sato, Atsushi Kawamoto, H
Hiroki Kobayashi, Farzad Gholami, S. Macrae Montgomery, Masato Tanaka, Liang Yue, Changyoung Yuhn, Yuki Sato, Atsushi Kawamoto, H. Jerry Qi, and Tsuyoshi Nomura. Computational synthesis of locomotive soft robots by topology optimization.Science Advances, 10(30):eadn6129, July 2024
2024
-
[9]
Eiben, Danielle Frances Kennedy, Jean-Baptiste Mouret, Philip Valencia, and Dave Winkler
David Howard, Agoston E. Eiben, Danielle Frances Kennedy, Jean-Baptiste Mouret, Philip Valencia, and Dave Winkler. Evolving embodied intelligence from materials to machines.Nature Machine Intelligence, 1(1):12–19, January 2019
2019
-
[10]
Interactive robogami: An end-to-end system for design of robots with ground locomotion.The International Journal of Robotics Research, 36(10):1131–1147, September 2017
Adriana Schulz, Cynthia Sung, Andrew Spielberg, Wei Zhao, Robin Cheng, Eitan Grinspun, Daniela Rus, and Wojciech Matusik. Interactive robogami: An end-to-end system for design of robots with ground locomotion.The International Journal of Robotics Research, 36(10):1131–1147, September 2017
2017
-
[11]
A linking invariant for truss robot motion planning.IEEE Robotics and Automation Letters, 7(2):1424–1430, 2022
Alexander Spinos and Mark Yim. A linking invariant for truss robot motion planning.IEEE Robotics and Automation Letters, 7(2):1424–1430, 2022
2022
-
[12]
Yuntao Guan, Zheming Zhuang, Ze Zhang, and Jian S. Dai. Design, Analysis, and Experiment of the Origami Robot Based on Spherical-Linkage Parallel Mechanism.Journal of Mechanical Design, 145(081701), May 2023
2023
-
[13]
Co-Design of the Morphology and Actuation of Soft Robots for Locomotion
Merel van Diepen and Kristina Shea. Co-Design of the Morphology and Actuation of Soft Robots for Locomotion. Journal of Mechanical Design, 144(083305), June 2022
2022
-
[14]
Bertossa
Rinaldo C. Bertossa. Morphology and behaviour: functional links in development and evolution.Philosophical Transactions of the Royal Society B: Biological Sciences, 366(1574):2056–2068, July 2011
2056
-
[15]
Efficient automatic design of robots.Proceedings of the National Academy of Sciences, 120(41):e2305180120, October 2023
David Matthews, Andrew Spielberg, Daniela Rus, Sam Kriegman, and Josh Bongard. Efficient automatic design of robots.Proceedings of the National Academy of Sciences, 120(41):e2305180120, October 2023
2023
-
[16]
Generating freeform endoskeletal robots.arXiv preprint arXiv:2412.01036, 2024
Muhan Li, Lingji Kong, and Sam Kriegman. Generating freeform endoskeletal robots.arXiv preprint arXiv:2412.01036, 2024
-
[17]
Soft robots modeling: A structured overview.IEEE Transactions on Robotics, 39(3):1728–1748, 2023
Costanza Armanini, Frédéric Boyer, Anup Teejo Mathew, Christian Duriez, and Federico Renda. Soft robots modeling: A structured overview.IEEE Transactions on Robotics, 39(3):1728–1748, 2023
2023
-
[18]
Prabhat Kumar, Anupam Saxena, and Roger A. Sauer. Computational Synthesis of Large Deformation Compliant Mechanisms Undergoing Self and Mutual Contact.Journal of Mechanical Design, 141(012302), October 2018
2018
-
[19]
A scalable pipeline for designing reconfigurable organisms.Proceedings of the National Academy of Sciences, 117(4):1853–1859, January 2020
Sam Kriegman, Douglas Blackiston, Michael Levin, and Josh Bongard. A scalable pipeline for designing reconfigurable organisms.Proceedings of the National Academy of Sciences, 117(4):1853–1859, January 2020
2020
-
[20]
Karacakol, Yunus Alapan, Sinan O
Alp C. Karacakol, Yunus Alapan, Sinan O. Demir, and Metin Sitti. Data-driven design of shape-programmable magnetic soft materials.Nature Communications, 16(1):2946, March 2025
2025
-
[21]
Luke Strgar and Sam Kriegman. Accelerated co-design of robots through morphological pretraining.arXiv preprint arXiv:2502.10862, 2025
-
[22]
Evolution and learning in differentiable robots
Luke Strgar, David Matthews, Tyler Hummer, and Sam Kriegman. Evolution and learning in differentiable robots. InProceedings of Robotics: Science and Systems, Delft, Netherlands, July 2024
2024
-
[23]
Alacoque, and Kai A
Anurag Bhattacharyya, Jinyoung Kim, Lee R. Alacoque, and Kai A. James. Design Synthesis of a 4D-Printed Self-Tying Knot With Programmable Morphology.Journal of Mechanical Design, 146(063303), December 2023
2023
-
[24]
Charles Schaff, Audrey Sedal, and Matthew R. Walter. Soft robots learn to crawl: Jointly optimizing design and control with sim-to-real transfer. InProceedings of Robotics: Science and Systems, June 2022
2022
-
[25]
DiffuseBot: Breeding Soft Robots With Physics-Augmented Generative Diffusion Models.Advances in Neural Information Processing Systems, 36:44398–44423, December 2023
Tsun-Hsuan Johnson Wang, Juntian Zheng, Pingchuan Ma, Yilun Du, Byungchul Kim, Andrew Spielberg, Josh Tenenbaum, Chuang Gan, and Daniela Rus. DiffuseBot: Breeding Soft Robots With Physics-Augmented Generative Diffusion Models.Advances in Neural Information Processing Systems, 36:44398–44423, December 2023
2023
-
[26]
Evenchik, Jared M
Liwei Wang, Alexander L. Evenchik, Jared M. Yang, Ryan L. Truby, and Wei Chen. Autonomous codesign and fabrication of multistimuli-responsive material systems.Science Advances, 11(37):eadx4409, September 2025
2025
-
[27]
Adams, Vincent Tournat, and Ka- tia Bertoldi
Giovanni Bordiga, Eder Medina, Sina Jafarzadeh, Cyrill Bösch, Ryan P. Adams, Vincent Tournat, and Ka- tia Bertoldi. Automated discovery of reprogrammable nonlinear dynamic metamaterials.Nature Materials, 23(11):1486–1494, November 2024. 17 COSMICA PREPRINT
2024
-
[28]
O’Hern, Rebecca Kramer-Bottiglio, and Josh Bongard
Atoosa Parsa, Corey S. O’Hern, Rebecca Kramer-Bottiglio, and Josh Bongard. Gradient-based design of computational granular crystals.arXiv preprint arXiv:2404.04825, 2024
-
[29]
The material point method for simulating continuum materials
Chenfanfu Jiang, Craig Schroeder, Joseph Teran, Alexey Stomakhin, and Andrew Selle. The material point method for simulating continuum materials. InACM SIGGRAPH 2016 Courses, SIGGRAPH ’16, New York, NY , USA, 2016. Association for Computing Machinery
2016
-
[30]
Tenenbaum, Daniela Rus, and Chuang Gan
Tsun-Hsuan Wang, Pingchuan Ma, Andrew Everett Spielberg, Zhou Xian, Hao Zhang, Joshua B. Tenenbaum, Daniela Rus, and Chuang Gan. Softzoo: A soft robot co-design benchmark for locomotion in diverse environments. arXiv preprint arXiv:2303.09555, 2023
-
[31]
Chandler, and Pietro Valdastri
Joshua Davy, Peter Lloyd, James H. Chandler, and Pietro Valdastri. A framework for simulation of magnetic soft robots using the material point method.IEEE Robotics and Automation Letters, 8(6):3470–3477, 2023
2023
-
[32]
Advanced soft robot modeling in ChainQueen.Robotica, 41(1):74–104, January 2023
Andrew Spielberg, Tao Du, Yuanming Hu, Daniela Rus, and Wojciech Matusik. Advanced soft robot modeling in ChainQueen.Robotica, 41(1):74–104, January 2023
2023
-
[33]
A review of differentiable simulators.IEEE Access, 12:97581–97604, 2024
Rhys Newbury, Jack Collins, Kerry He, Jiahe Pan, Ingmar Posner, David Howard, and Akansel Cosgun. A review of differentiable simulators.IEEE Access, 12:97581–97604, 2024
2024
-
[34]
Tianju Xue, Shuheng Liao, Zhengtao Gan, Chanwook Park, Xiaoyu Xie, Wing Kam Liu, and Jian Cao. JAX-FEM: A differentiable GPU-accelerated 3D finite element solver for automatic inverse design and mechanistic data science.Computer Physics Communications, 291:108802, October 2023
2023
-
[35]
arXiv preprint arXiv:1910.00935 , year=
Yuanming Hu, Luke Anderson, Tzu-Mao Li, Qi Sun, Nathan Carr, Jonathan Ragan-Kelley, and Frédo Durand. Difftaichi: Differentiable programming for physical simulation.arXiv preprint arXiv:1910.00935, 2020
-
[36]
Diffpd: Differentiable projective dynamics.ACM Trans
Tao Du, Kui Wu, Pingchuan Ma, Sebastien Wah, Andrew Spielberg, Daniela Rus, and Wojciech Matusik. Diffpd: Differentiable projective dynamics.ACM Trans. Graph., 41(2), November 2021
2021
-
[37]
FEniTop: a simple FEniCSx implementation for 2D and 3D topology optimization supporting parallel computing.Structural and Multidisciplinary Optimization, 67(8):140, August 2024
Yingqi Jia, Chao Wang, and Xiaojia Shelly Zhang. FEniTop: a simple FEniCSx implementation for 2D and 3D topology optimization supporting parallel computing.Structural and Multidisciplinary Optimization, 67(8):140, August 2024
2024
-
[38]
Computational co-design of structure and feedback controller for locomoting soft robots.Structural and Multidisciplinary Optimization, 68(9):185, September 2025
Yuki Sato, Changyoung Yuhn, Hiroki Kobayashi, Atsushi Kawamoto, and Tsuyoshi Nomura. Computational co-design of structure and feedback controller for locomoting soft robots.Structural and Multidisciplinary Optimization, 68(9):185, September 2025
2025
-
[39]
4d topology optimization: Integrated optimization of the structure and self-actuation of soft bodies for dynamic motions
Changyoung Yuhn, Yuki Sato, Hiroki Kobayashi, Atsushi Kawamoto, and Tsuyoshi Nomura. 4d topology optimization: Integrated optimization of the structure and self-actuation of soft bodies for dynamic motions. Computer Methods in Applied Mechanics and Engineering, 414:116187, 2023
2023
-
[40]
Zhang, Kui Wu, Andrew Spielberg, Robert K
Pingchuan Ma, Tao Du, John Z. Zhang, Kui Wu, Andrew Spielberg, Robert K. Katzschmann, and Wojciech Matusik. DiffAqua: a differentiable computational design pipeline for soft underwater swimmers with shape interpolation.ACM Trans. Graph., 40(4):132:1–132:14, July 2021
2021
-
[41]
Learning-In- The-Loop Optimization: End-To-End Control And Co-Design Of Soft Robots Through Learned Deep Latent Representations
Andrew Spielberg, Allan Zhao, Yuanming Hu, Tao Du, Wojciech Matusik, and Daniela Rus. Learning-In- The-Loop Optimization: End-To-End Control And Co-Design Of Soft Robots Through Learned Deep Latent Representations. InAdvances in Neural Information Processing Systems, volume 32. Curran Associates, Inc., 2019
2019
-
[42]
Liwei Wang. Co-design of magnetic soft robots with large deformation and contacts via material point method and topology optimization.Computer Methods in Applied Mechanics and Engineering, 445:118205, October 2025
2025
-
[43]
Lumpe and Kristina Shea
Thomas S. Lumpe and Kristina Shea. Computational Design of Multi-State Lattice Structures With Finite Mechanisms for Shape Morphing.Journal of Mechanical Design, 145(071701), March 2023
2023
-
[44]
A versatile co-design approach for dynamic legged robots
Traiko Dinev, Carlos Mastalli, Vladimir Ivan, Steve Tonneau, and Sethu Vijayakumar. A versatile co-design approach for dynamic legged robots. In2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 5562–5569. IEEE, 2022
2022
-
[45]
Multi-legged robots: progress and challenges.National Science Review, 10(5):nwac214, May 2023
Yue Gao, Bo Su, Lei Jiang, and Feng Gao. Multi-legged robots: progress and challenges.National Science Review, 10(5):nwac214, May 2023
2023
-
[46]
Design and control of compliant tensegrity robots through simulation and hardware validation
Ken Caluwaerts, Jérémie Despraz, Atıl I¸ sçen, Andrew P Sabelhaus, Jonathan Bruce, Benjamin Schrauwen, and Vytas SunSpiral. Design and control of compliant tensegrity robots through simulation and hardware validation. Journal of the royal society interface, 11(98), 2014
2014
-
[47]
Shah, Joran W
Dylan S. Shah, Joran W. Booth, Robert L. Baines, Kun Wang, Massimo Vespignani, Kostas Bekris, and Rebecca Kramer-Bottiglio. Tensegrity Robotics.Soft Robotics, 9(4):639–656, August 2022
2022
-
[48]
Biohybrid bipedal robot powered by skeletal muscle tissue.Matter, 7(3):1026–1041, 2024
Ryotaro Kinjo, Yosuke Shimizu, Yuya Morimoto, and Shoji Takeuchi. Biohybrid bipedal robot powered by skeletal muscle tissue.Matter, 7(3):1026–1041, 2024. 18 COSMICA PREPRINT
2024
-
[49]
Biohybrid robots: recent progress, challenges, and perspectives
Victoria A Webster-Wood, Maria Guix, Nicole W Xu, Bahareh Behkam, Hirotaka Sato, Deblina Sarkar, Samuel Sanchez, Masahiro Shimizu, and Kevin Kit Parker. Biohybrid robots: recent progress, challenges, and perspectives. Bioinspiration & Biomimetics, 18(1):015001, November 2022
2022
-
[50]
Topology optimization of hard-magnetic soft materials.Journal of the Mechanics and Physics of Solids, 158:104628, January 2022
Zhi Zhao and Xiaojia Shelly Zhang. Topology optimization of hard-magnetic soft materials.Journal of the Mechanics and Physics of Solids, 158:104628, January 2022
2022
-
[51]
Central pattern generators for locomotion control in animals and robots: a review.Neural networks, 21(4):642–653, 2008
Auke Jan Ijspeert. Central pattern generators for locomotion control in animals and robots: a review.Neural networks, 21(4):642–653, 2008
2008
-
[52]
M. P. Bendsøe. Optimal shape design as a material distribution problem.Structural optimization, 1(4):193–202, December 1989
1989
-
[53]
Elsevier, 2000
Michel Fortin and Roland Glowinski.Augmented Lagrangian methods: applications to the numerical solution of boundary-value problems, volume 15. Elsevier, 2000
2000
-
[54]
Estimating or Propagating Gradients Through Stochastic Neurons for Conditional Computation
Yoshua Bengio, Nicholas Léonard, and Aaron Courville. Estimating or propagating gradients through stochastic neurons for conditional computation.arXiv preprint arXiv:1308.3432, 2013
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[55]
Roth, Raymond L
Frank L. Roth, Raymond L. Driscoll, and William L. Holt. Frictional Properties of Rubber.Rubber Chemistry and Technology, 16(1):155–177, March 1943
1943
-
[56]
Biohybrid robotics with living cell actuation.Chemical Society Reviews, 49(12):4043–4069, 2020
Lingyu Sun, Yunru Yu, Zhuoyue Chen, Feika Bian, Fangfu Ye, Lingyun Sun, and Yuanjin Zhao. Biohybrid robotics with living cell actuation.Chemical Society Reviews, 49(12):4043–4069, 2020
2020
-
[57]
Physical reservoir computing with emerging electronics.Nature Electronics, 7(3):193–206, 2024
Xiangpeng Liang, Jianshi Tang, Yanan Zhong, Bin Gao, He Qian, and Huaqiang Wu. Physical reservoir computing with emerging electronics.Nature Electronics, 7(3):193–206, 2024
2024
-
[58]
Mechanical neural networks: Architected materials that learn behaviors.Science Robotics, 7(71):eabq7278, 2022
Ryan H Lee, Erwin AB Mulder, and Jonathan B Hopkins. Mechanical neural networks: Architected materials that learn behaviors.Science Robotics, 7(71):eabq7278, 2022. 19
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.