Dynamics Computation of Soft-Rigid Hybrid-Link System and Its Application to Motion Analysis of an Athlete Wearing Sport Prosthesis
Pith reviewed 2026-05-14 18:16 UTC · model grok-4.3
The pith
A soft-rigid hybrid-link model enables inverse kinematics and dynamics computation for athletes wearing flexible prostheses, with 12% error reported on ground-reaction-force estimation in a human-subject trial.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
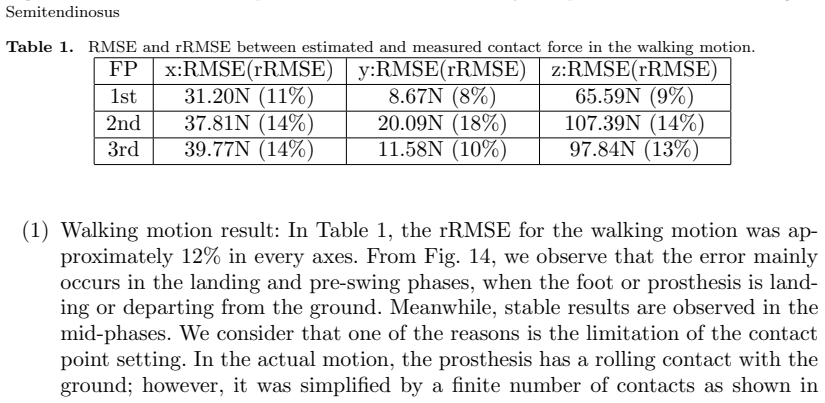
Through a human subject experiment, we show that the inverse dynamics achieved approximately 12% error on the ground reaction force estimation. Furthermore, we provide the muscle force estimation considering muscle amputation and interaction force with the prosthesis leg deformation.
Load-bearing premise
The hybrid-link formulation accurately captures the interaction force between the rigid human skeleton and the flexible prosthesis without requiring additional parameters or post-hoc tuning that would invalidate the inverse-dynamics results.
Figures



















read the original abstract
This paper presents a motion analysis framework for an athlete wearing sport-specific flexible prosthesis based on the soft-rigid hybrid-link system. Such a motion analysis is a challenging problem because we need to consider the interaction force between the rigid human skeleton system and a flexible prosthesis. However, most of human musculoskeletal models are based on the computation framework of a rigid-body multi-link system. Recently in soft robotics research field, fast and efficient modeling methods were developed for a flexible rod deformation, which allows us to build a hybrid-link system that integrates rigid-link and soft-bodies in a unified formulation. We apply inverse kinematics of the hybrid-link system to motion reconstruction from a motion captured data, and also present the estimation of the joint torques and ground reaction force by inverse dynamics. Through a human subject experiment, we show that the inverse dynamics achieved approximately 12% error on the ground reaction force estimation. Furthermore, we provide the muscle force estimation considering muscle amputation and interaction force with the prosthesis leg deformation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper presents a framework for motion analysis of an athlete with a sport prosthesis using a soft-rigid hybrid-link system. It integrates rigid-body dynamics with soft-body modeling to account for interaction forces, applies inverse kinematics to motion capture data, and uses inverse dynamics to estimate joint torques, ground reaction forces (GRF), and muscle forces considering amputation and prosthesis deformation. A human subject experiment reports an approximately 12% error in GRF estimation.
Significance. Should the hybrid model prove robust, the work offers a novel approach to analyzing sports movements in prosthetic users by unifying soft robotics techniques with human dynamics. It enables estimation of internal forces and muscle activations that rigid models cannot capture, potentially aiding in performance optimization and injury prevention for amputee athletes. The experimental application to real motion data is a positive step toward practical use.
major comments (3)
- [Human subject experiment (results)] The GRF estimation achieves approximately 12% error, but the abstract and results provide no error bars, no description of data exclusion rules, no baseline comparison to rigid models, and no count of free parameters fitted (such as prosthesis stiffness and damping coefficients). This limits assessment of the result's reliability and the hybrid formulation's specific role.
- [Hybrid-link formulation (methods)] The interaction force computation between the rigid skeleton and flexible prosthesis depends on stiffness and damping parameters. The paper should specify their identification method and confirm they were not adjusted post-hoc to fit the force-plate data used in validation, as this could introduce circularity in the 12% error claim.
- [Inverse dynamics application] While GRF error is reported, there is no independent validation of the soft-body deformation predictions, such as comparison to measured prosthesis bending or interface pressures. The integrated GRF metric alone does not isolate the accuracy of the hybrid coupling terms.
minor comments (2)
- [Introduction] The background on soft robotics methods for flexible rod deformation could include more specific citations to recent efficient modeling techniques.
- [Figures] Ensure that diagrams of the hybrid-link system clearly label rigid and soft segments and the interaction points.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major point below, indicating where revisions will be made to improve clarity and rigor.
read point-by-point responses
-
Referee: [Human subject experiment (results)] The GRF estimation achieves approximately 12% error, but the abstract and results provide no error bars, no description of data exclusion rules, no baseline comparison to rigid models, and no count of free parameters fitted (such as prosthesis stiffness and damping coefficients). This limits assessment of the result's reliability and the hybrid formulation's specific role.
Authors: We agree that these details are important for evaluating reliability. In the revised manuscript we will add error bars computed from the temporal variation of the GRF estimation error across the movement cycle, describe the data processing pipeline and confirm that no trials were excluded, include a direct comparison against a standard rigid-body inverse-dynamics baseline, and explicitly state the number of fitted parameters (two stiffness and two damping coefficients identified in separate calibration tests). revision: yes
-
Referee: [Hybrid-link formulation (methods)] The interaction force computation between the rigid skeleton and flexible prosthesis depends on stiffness and damping parameters. The paper should specify their identification method and confirm they were not adjusted post-hoc to fit the force-plate data used in validation, as this could introduce circularity in the 12% error claim.
Authors: The stiffness and damping coefficients were obtained from independent material characterization experiments performed on the prosthesis prior to the motion-capture session and were held fixed during inverse-dynamics computation. They were not tuned to the force-plate recordings. We will expand the Methods section with a full description of the calibration procedure to eliminate any ambiguity regarding circularity. revision: yes
-
Referee: [Inverse dynamics application] While GRF error is reported, there is no independent validation of the soft-body deformation predictions, such as comparison to measured prosthesis bending or interface pressures. The integrated GRF metric alone does not isolate the accuracy of the hybrid coupling terms.
Authors: We acknowledge that the present validation relies solely on the integrated GRF metric and does not include direct measurements of prosthesis bending or interface pressure. No such auxiliary sensor data were collected in the current human-subject experiment, so an independent check of the soft-body deformation component cannot be added without new experiments. revision: no
- Independent validation of soft-body deformation (prosthesis bending or interface pressures) is not possible because the original experiment did not record these quantities.
Axiom & Free-Parameter Ledger
free parameters (1)
- prosthesis stiffness and damping coefficients
axioms (1)
- domain assumption The interaction force between rigid skeleton and flexible prosthesis can be captured by a single unified hybrid-link formulation without additional contact constraints.
Reference graph
Works this paper leans on
-
[1]
The fastest sprinter in 2068 has an artificial limb? ; 2015
Hobara H, Kobayashi Y, Heldoorn TA, et al. The fastest sprinter in 2068 has an artificial limb? ; 2015
work page 2068
-
[2]
Nakamura Y, Yamane K, Fujita Y, et al. Somatosensory computation for man-machine interface from motion-capture data and musculoskeletal human model. IEEE Transactions on Robotics. 2005;21(1):58–66
work page 2005
-
[3]
Opensim: open-source software to create and analyze dynamic simulations of movement
Delp SL, Anderson FC, Arnold AS, et al. Opensim: open-source software to create and analyze dynamic simulations of movement. IEEE transactions on biomedical engineering. 2007;54(11):1940–1950
work page 2007
-
[4]
A prosthesis-specific multi-link segment model of lower- limb amputee sprinting
Rigney SM, Simmons A, Kark L. A prosthesis-specific multi-link segment model of lower- limb amputee sprinting. Journal of Biomechanics. 2016;49(14):3185–3193
work page 2016
-
[5]
Kleesattel ALEN, Mombaur K. Inverse optimal control based enhancement of sprinting motion analysis with and without running-specific prostheses. In: 2018 7th IEEE Inter- national Conference on Biomedical Robotics and Biomechatronics (Biorob); IEEE; 2018. p. 556–562
work page 2018
-
[6]
Murai A, Hobara H, Hashizume S, et al. Can forward dynamics simulation with sim- ple model estimate complex phenomena?: Case study on sprinting using running-specific prosthesis. Robomech Journal. 2018;5(1):1–8
work page 2018
-
[7]
Control of elastic soft robots based on real-time finite element method
Duriez C. Control of elastic soft robots based on real-time finite element method. In: 2013 IEEE international conference on robotics and automation; IEEE; 2013. p. 3982–3987
work page 2013
-
[8]
Mendhurwar K, Handa G, Zhu L, et al. A system for acquisition and modelling of ice- hockey stick shape deformation from player shot videos. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops; 2020. p. 890–891
work page 2020
-
[9]
Effect of ice hockey stick stiffness on performance
Kays BT, Smith L V. Effect of ice hockey stick stiffness on performance. Sports Engineer- ing. 2017;20:245–254
work page 2017
-
[10]
A study on the dynamic structural behavior of olympic sabres
Vivaldi F, Cortese L, Coppola T, et al. A study on the dynamic structural behavior of olympic sabres. Procedia Structural Integrity. 2018;8:345–353
work page 2018
-
[11]
A framework for the automated design and modelling of soft robotic systems
Runge G, Raatz A. A framework for the automated design and modelling of soft robotic systems. CIRP Annals. 2017;66(1):9–12
work page 2017
-
[12]
Review on generic methods for mechanical modeling, simulation and control of soft robots
Schegg P, Duriez C. Review on generic methods for mechanical modeling, simulation and control of soft robots. Plos one. 2022;17(1):e0251059
work page 2022
-
[13]
Nonlinear problems of elasticity
Antman SS. Nonlinear problems of elasticity. New York: Springer; 2005
work page 2005
-
[14]
Discrete cosserat approach for multisection soft manip- ulator dynamics
Renda F, Boyer F, Dias J, et al. Discrete cosserat approach for multisection soft manip- ulator dynamics. IEEE Transactions on Robotics. 2018;34(6):1518–1533
work page 2018
-
[15]
Renda F, Seneviratne L. A geometric and unified approach for modeling soft-rigid multi- body systems with lumped and distributed degrees of freedom. In: 2018 IEEE Interna- tional Conference on Robotics and Automation (ICRA); IEEE; 2018. p. 1567–1574
work page 2018
-
[16]
Dynamics computation of a hybrid multi-link humanoid robot integrating rigid and soft bodies
Ishigaki T, Yamamoto K. Dynamics computation of a hybrid multi-link humanoid robot integrating rigid and soft bodies. In: 2021 IEEE/RSJ International Conference on Intel- ligent Robots and Systems (IROS); IEEE; 2021. p. 2816–2821
work page 2021
-
[17]
Mathew AT, Hmida IB, Armanini C, et al. Sorosim: A matlab toolbox for hybrid rigid-soft 21 robots based on the geometric variable-strain approach. IEEE Robotics and Automation Magazine. 2023 9;30:106–122
work page 2023
-
[18]
Kim S, Ishigaki T, Shimane Y, et al. Inverse kinematics of hybrid multi-link system and its application to motion capture for athlete wearing sports prosthesis. In: 2022 IEEE- RAS 21st International Conference on Humanoid Robots (Humanoids); IEEE; 2022. p. 837–842
work page 2022
-
[19]
Rigid body dynamics algorithms
Featherstone R. Rigid body dynamics algorithms. Springer; 2008
work page 2008
-
[20]
The heat of shortening and the dynamic constants of muscle
Hill A V. The heat of shortening and the dynamic constants of muscle. Proceedings of the Royal Society of London Series B-Biological Sciences. 1938;126(843):136–195
work page 1938
-
[21]
Myodesis or myoplasty in trans-femoral amputations
Geertzen JH, van der Schans SM, Jutte PC, et al. Myodesis or myoplasty in trans-femoral amputations. what is the best option? an explorative study. Medical Hypotheses. 2019; 124:7–12
work page 2019
-
[22]
Outcomes after 294 transtibial amputations with the posterior myocutaneous flap
Brown BJ, Iorio ML, Klement M, et al. Outcomes after 294 transtibial amputations with the posterior myocutaneous flap. The international journal of lower extremity wounds. 2014;13(1):33–40
work page 2014
-
[23]
Shimane Y, Ishigaki T, Kim S, et al. Application of piece-wise constant strain model to flexible deformation calculation of sports prosthesis and stiffness estimation. In: 2022 IEEE Int. Conf. Intell. Robots Syst.; (To be published)
work page 2022
-
[24]
Prediction of ground reaction forces during gait based on kinematics and a neural network model
Oh SE, Choi A, Mun JH. Prediction of ground reaction forces during gait based on kinematics and a neural network model. Journal of biomechanics. 2013;46(14):2372–2380
work page 2013
-
[25]
Impedance characteristics of a neuromusculoskeletal model of the human arm i
Stroeve S. Impedance characteristics of a neuromusculoskeletal model of the human arm i. posture control. Biological cybernetics. 1999;81(5-6):475–494
work page 1999
-
[26]
Winters JM, Stark L. Analysis of fundamental human movement patterns through the use of in-depth antagonistic muscle models. IEEE transactions on biomedical engineering. 1985;(10):826–839. 22
work page 1985
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.