FPGA-based disturbance-observer servo for broadband noise suppression in laser frequency stabilization
Pith reviewed 2026-06-29 19:39 UTC · model grok-4.3
The pith
A disturbance observer on FPGA augments PID to cut laser frequency noise by 16.9 dB below 40 kHz.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
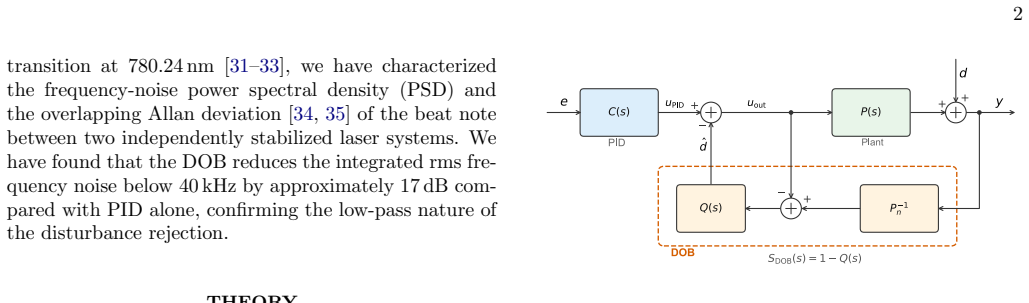
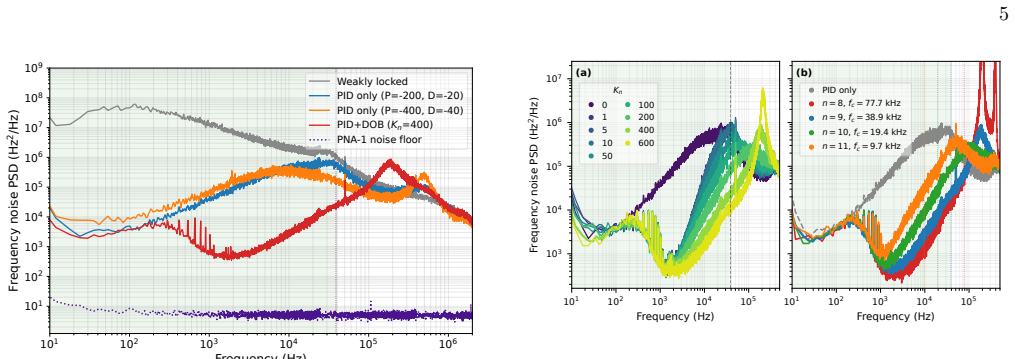
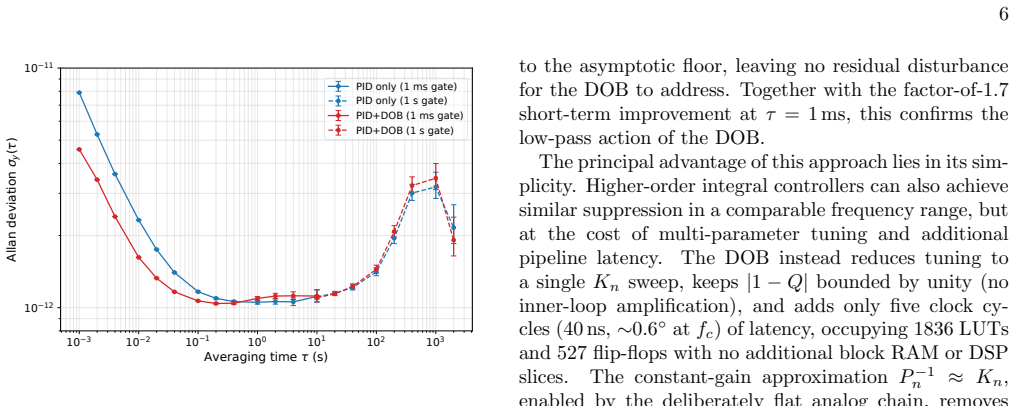
The central claim is that a digital disturbance observer (DOB) with a first-order exponential moving average Q-filter, implemented on FPGA, augments conventional PID control to achieve broadband frequency-noise suppression in laser stabilization. Using modulation transfer spectroscopy on the 87Rb D2 line, the integrated rms frequency noise below 40 kHz is reduced by 16.9 dB compared to PID alone, from approximately 140 kHz to 20 kHz, with short-term fractional frequency instability improving from 7.9e-12 to 4.6e-12 at 1 ms and long-term stability unchanged.
What carries the argument
The disturbance observer (DOB) using a first-order exponential moving average filter as Q-filter, which approximates the plant dynamics through a single one-dimensional gain sweep instead of multi-parameter identification.
If this is right
- The DOB-augmented architecture provides enhanced noise rejection in FPGA-based servo systems.
- Short-term stability improves without impacting long-term performance.
- The method simplifies implementation by replacing complex plant identification with a gain sweep.
- It is suitable for atomic physics experiments requiring better frequency stabilization.
Where Pith is reading between the lines
- This method could extend to other control applications where quick approximation of plant dynamics is needed without full modeling.
- Potential for use in integrated photonics or portable atomic clocks to enhance performance.
- Further tests with varying loop parameters might reveal the limits of the EMA filter approximation.
Load-bearing premise
The first-order exponential moving average filter sufficiently approximates the plant dynamics to enable broadband suppression without introducing instabilities.
What would settle it
A measurement showing that adding the DOB does not reduce the integrated rms frequency noise by approximately 16.9 dB below 40 kHz, or that it causes loop instability, would falsify the claim.
Figures
read the original abstract
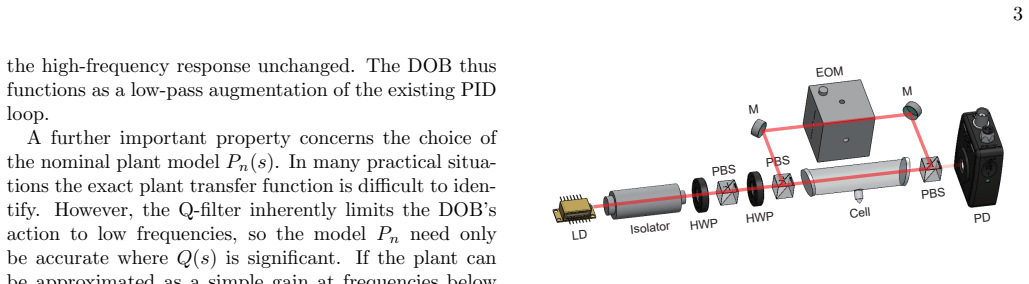
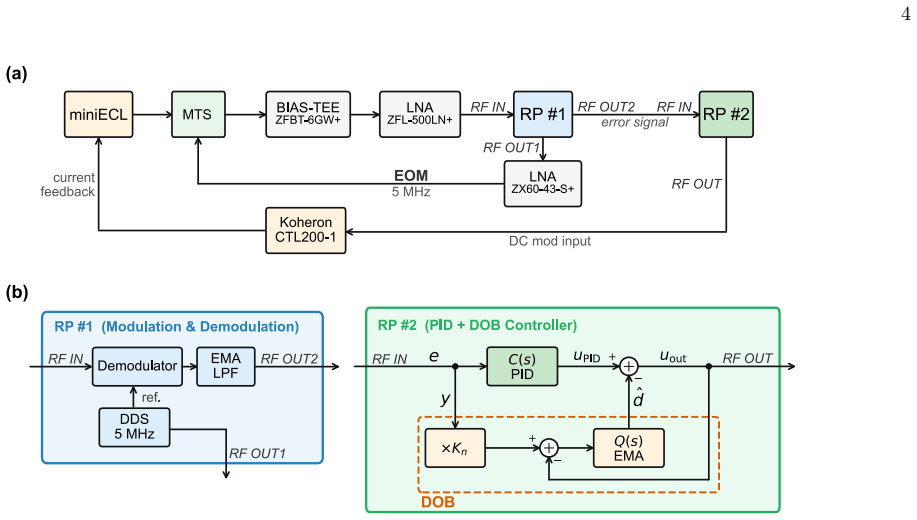
We have demonstrated broadband frequency-noise suppression in a laser stabilization system by augmenting a conventional proportional-integral-derivative (PID) controller with a digital disturbance observer (DOB) implemented on a field-programmable gate array (FPGA). The DOB employs a first-order exponential moving average filter as its Q-filter, replacing multi-parameter frequency-domain plant identification with a single one-dimensional gain sweep. Using modulation transfer spectroscopy on the 87Rb D2 line at 780.24 nm, we have measured the frequency-noise power spectral density and the Allan deviation of the beat note between two independently stabilized lasers. The integrated rms frequency noise below 40 kHz decreased by 16.9 dB compared with PID alone, corresponding to a reduction from approximately 140 kHz to 20 kHz. The short-term fractional frequency instability improved from sigma_y(1 ms) = $7.9 \times 10^{-12}$ to $4.6 \times 10^{-12}$, while the long-term stability at tau > 1 s remained within statistical uncertainty. This DOB-augmented architecture offers a simple and effective route to enhanced noise rejection in FPGA-based servo systems for atomic physics experiments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper demonstrates broadband frequency-noise suppression in a laser stabilization system by augmenting a conventional PID controller with a digital disturbance observer (DOB) implemented on an FPGA. The DOB uses a first-order exponential moving average (EMA) filter as its Q-filter, tuned via a single gain parameter rather than multi-parameter plant identification. Using modulation transfer spectroscopy on the 87Rb D2 line, beat-note measurements between two stabilized lasers show a 16.9 dB reduction in integrated rms frequency noise below 40 kHz (from ~140 kHz to 20 kHz) and short-term fractional frequency instability improvement from 7.9e-12 to 4.6e-12 at 1 ms, with long-term stability unchanged within uncertainty.
Significance. If the central experimental claims hold, the result offers a low-complexity route to enhanced broadband noise rejection in FPGA-based laser servos for atomic physics, avoiding detailed frequency-domain plant modeling. The direct comparison of two independently stabilized lasers via beat-note PSD and Allan deviation provides a falsifiable experimental test of the architecture.
major comments (1)
- [Abstract] Abstract: the claim that the first-order EMA Q-filter 'replaces multi-parameter frequency-domain plant identification' with a 'single one-dimensional gain sweep' is load-bearing for attributing the 16.9 dB rms-noise reduction to the DOB; however, no comparison is shown between the EMA transfer function and the measured plant (laser + AOM + MTS) response over the 40 kHz integration band, leaving open the possibility that unmodeled dynamics cause the observed suppression or stability changes.
minor comments (1)
- The abstract reports quantitative improvements (rms noise, Allan deviation) without stating the number of independent measurements, statistical methods, error bars, or data-exclusion criteria used to obtain the values 140 kHz to 20 kHz and 7.9e-12 to 4.6e-12.
Simulated Author's Rebuttal
We thank the referee for their careful reading and constructive feedback on our manuscript. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the first-order EMA Q-filter 'replaces multi-parameter frequency-domain plant identification' with a 'single one-dimensional gain sweep' is load-bearing for attributing the 16.9 dB rms-noise reduction to the DOB; however, no comparison is shown between the EMA transfer function and the measured plant (laser + AOM + MTS) response over the 40 kHz integration band, leaving open the possibility that unmodeled dynamics cause the observed suppression or stability changes.
Authors: The manuscript reports a direct head-to-head comparison of the identical laser stabilization system operated first with PID control alone and then with the PID augmented by the DOB; therefore the measured 16.9 dB reduction in integrated rms frequency noise and the improvement in short-term Allan deviation are attributable to the addition of the DOB. The EMA Q-filter is deliberately chosen so that its single tunable gain sets the effective bandwidth without any multi-parameter frequency-domain plant identification step, which is the central methodological claim. Because the underlying plant (laser + AOM + MTS) is unchanged between the two data sets, any unmodeled plant dynamics are common to both measurements and cannot account for the observed difference. While an overlay of the EMA transfer function against an independently measured plant response would be informative, it is not required to support either the performance result or the claim that detailed plant modeling has been avoided. revision: no
Circularity Check
No significant circularity; results are direct experimental measurements
full rationale
The paper presents an experimental demonstration comparing PID-only versus PID+DOB servo performance via measured frequency-noise PSD and Allan deviation on a beat note between two stabilized lasers. No derivation chain exists that reduces a claimed prediction or uniqueness result to fitted inputs or self-citations by construction. The Q-filter choice is presented as a practical simplification whose adequacy is tested by the reported suppression numbers rather than assumed; the 16.9 dB reduction and instability improvement are outcomes of hardware measurements, not tautological outputs of any model equation. This is the normal case of a self-contained experimental report.
Axiom & Free-Parameter Ledger
free parameters (1)
- one-dimensional gain for Q-filter
axioms (1)
- domain assumption The plant dynamics of the laser stabilization loop can be adequately captured by a first-order EMA filter inside the DOB without full frequency-domain modeling.
Reference graph
Works this paper leans on
-
[1]
PID only (gray) is shown for reference
at fixed gainK n = 400. PID only (gray) is shown for reference. Dotted vertical lines markf c for eachn. The green shaded regions indicate the integration window (up to 40 kHz). imal. Abovef c, traces with and without DOB converge, confirming the low-pass rejection predicted by Eq. (6). A relocated servo bump appears near 200 kHz, above the 40 kHz integra...
2022
-
[2]
A. D. Ludlow, M. M. Boyd, J. Ye, E. Peik, and P. O. Schmidt, Optical atomic clocks, Rev. Mod. Phys.87, 637 (2015)
2015
-
[3]
Wynands and S
R. Wynands and S. Weyers, Atomic fountain clocks, Metrologia42, S64 (2005)
2005
-
[4]
S. Bize, P. Laurent, M. Abgrall, H. Marion, I. Maksi- movic, L. Cacciapuoti, J. Gr¨ unert, C. Vian, F. Pereira dos Santos, P. Rosenbusch, P. Lemonde, G. Santarelli, P. Wolf, A. Clairon, A. Luiten, M. Tobar, and C. Sa- lomon, Cold atom clocks and applications, J. Phys. B 38, S449 (2005)
2005
-
[5]
Kasevich and S
M. Kasevich and S. Chu, Atomic interferometry using stimulated Raman transitions, Phys. Rev. Lett.67, 181 (1991)
1991
-
[6]
Bongs, M
K. Bongs, M. Holynski, J. Vovrosh, P. Bouyer, G. Con- don, E. Rasel, C. Schubert, W. P. Schleich, and A. Roura, Taking atom interferometric quantum sensors from the laboratory to real-world applications, Nat. Rev. Phys.1, 731 (2019)
2019
-
[7]
C. D. Bruzewicz, J. Chiaverini, R. McConnell, and J. M. 7 Sage, Trapped-ion quantum computing: Progress and challenges, Appl. Phys. Rev.6, 021314 (2019)
2019
-
[8]
Grotti, S
J. Grotti, S. Koller, S. Vogt, S. Hafner, U. Sterr, C. Lis- dat, H. Denker, C. Voigt, L. Timmen, A. Rolland, F. N. Baynes, H. S. Margolis, M. Zampaolo, P. Thoumany, M. Pizzocaro, B. Rauf, F. Bregolin, A. Tampellini, P. Barbieri, M. Zucco, G. A. Costanzo, C. Clivati, F. Levi, and D. Calonico, Geodesy and metrology with a transportable optical clock, Nat. P...
2018
-
[9]
M´ enoret, P
V. M´ enoret, P. Vermeulen, N. Le Moigne, S. Bonvalot, P. Bouyer, A. Landragin, and B. Desruelle, Gravity mea- surements below 10 −9 gwith a transportable absolute quantum gravimeter, Sci. Rep.8, 12300 (2018)
2018
-
[10]
Becker, M
D. Becker, M. D. Lachmann, S. T. Seidel, H. Ahlers, A. N. Dinkelaker, J. Grosse, O. Hellmig, H. M¨ untinga, V. Schkolnik, T. Wendrich, A. Wenzlawski, B. Weps, R. Corgier, T. Franz, N. Gaaloul, W. Herr, D. L¨ udtke, M. Popp, S. Amri, H. Duncker, M. Erbe, A. Kohfeldt, A. Kubelka-Lange, C. Braxmaier, E. Charron, W. Ert- mer, M. Krutzik, C. L¨ ammerzahl, A. P...
2018
-
[11]
Strangfeld, S
A. Strangfeld, S. Kanthak, M. Schiemangk, B. Wiegand, A. Wicht, A. Ling, and M. Krutzik, A prototype of a compact rubidium-based optical frequency reference for operation on nanosatellites, J. Opt. Soc. Am. B38, 1885 (2021)
2021
-
[12]
Schmidt, M
M. Schmidt, M. Prevedelli, A. Giorgini, G. M. Tino, and A. Peters, A portable laser system for high-precision atom interferometry experiments, Appl. Phys. B102, 11 (2011)
2011
-
[13]
Bechhoefer, Feedback for physicists: A tutorial essay on control, Rev
J. Bechhoefer, Feedback for physicists: A tutorial essay on control, Rev. Mod. Phys.77, 783 (2005)
2005
-
[14]
Preuschoff, M
T. Preuschoff, M. Schlosser, and G. Birkl, Digital laser frequency and intensity stabilization based on the STEM- lab platform (originally Red Pitaya), Rev. Sci. Instrum. 91, 083001 (2020)
2020
-
[15]
Wiegand, B
B. Wiegand, B. Leykauf, R. J¨ ordens, and M. Krutzik, Linien: A versatile, user-friendly, open-source FPGA- based tool for frequency stabilization and spectroscopy parameter optimization, Rev. Sci. Instrum.93, 063001 (2022)
2022
-
[16]
Neuhaus, M
L. Neuhaus, M. Croquette, R. Metzdorff, S. Chua, P.- E. Jacquet, A. Journeaux, A. Heidmann, T. Briant, T. Jacqmin, P.-F. Cohadon, and S. Del´ eglise, Python Red Pitaya Lockbox (PyRPL): An open source software package for digital feedback control in quantum optics experiments, Rev. Sci. Instrum.95, 033003 (2024)
2024
-
[17]
Avalos, X
V. Avalos, X. Nie, A. Yang, C. He, S. Kumar, and K. Dieckmann, Field-programmable-gate-array- based digital frequency stabilization of low-phase-noise diode lasers, Rev. Sci. Instrum.94, 063001 (2023)
2023
-
[18]
D. R. Leibrandt and J. Heidecker, An open source digital servo for atomic, molecular, and optical physics experi- ments, Rev. Sci. Instrum.86, 123115 (2015)
2015
-
[19]
Appel, A
J. Appel, A. MacRae, and A. I. Lvovsky, A versatile digi- tal GHz phase lock for external cavity diode lasers, Meas. Sci. Technol.20, 055302 (2009)
2009
-
[20]
Di Domenico, S
G. Di Domenico, S. Schilt, and P. Thomann, Simple ap- proach to the relation between laser frequency noise and laser line shape, Appl. Opt.49, 4801 (2010)
2010
-
[21]
Numata, A
K. Numata, A. Kemery, and J. Camp, Thermal-noise limit in the frequency stabilization of lasers with rigid cavities, Phys. Rev. Lett.93, 250602 (2004)
2004
-
[22]
Ohnishi, M
K. Ohnishi, M. Shibata, and T. Murakami, Motion control for advanced mechatronics, IEEE/ASME Trans. Mechatron.1, 56 (1996)
1996
-
[23]
Umeno and Y
T. Umeno and Y. Hori, Robust speed control of DC ser- vomotors using modern two degrees-of-freedom controller design, IEEE Trans. Ind. Electron.38, 363 (1991)
1991
-
[24]
C. J. Kempf and S. Kobayashi, Disturbance observer and feedforward design for a high-speed direct-drive position- ing table, IEEE Trans. Control Syst. Technol.7, 513 (1999)
1999
-
[25]
Schrijver and J
E. Schrijver and J. van Dijk, Disturbance observers for rigid mechanical systems: equivalence, stability, and de- sign, ASME J. Dyn. Syst. Meas. Control124, 539 (2002)
2002
-
[26]
Sariyildiz and K
E. Sariyildiz and K. Ohnishi, A guide to design distur- bance observer, ASME J. Dyn. Syst. Meas. Control136, 021011 (2014)
2014
-
[27]
W.-H. Chen, J. Yang, L. Guo, and S. Li, Disturbance- observer-based control and related methods—an overview, IEEE Trans. Ind. Electron.63, 1083 (2016)
2016
-
[28]
Sariyildiz, R
E. Sariyildiz, R. Oboe, and K. Ohnishi, Disturbance observer-based robust control and its applications: 35th anniversary overview, IEEE Trans. Ind. Electron.67, 2042 (2020)
2042
-
[29]
Shim and N
H. Shim and N. H. Jo, An almost necessary and sufficient condition for robust stability of closed-loop systems with disturbance observer, Automatica45, 296 (2009)
2009
-
[30]
Chao, Z.-X
Y.-X. Chao, Z.-X. Hua, X.-H. Liang, Z.-P. Yue, L. You, and M. K. Tey, Pound–drever–hall feedforward: laser phase noise suppression beyond feedback, Optica11, 945 (2024)
2024
-
[31]
Li, W.-W
L. Li, W.-W. Huang, X. Wang, Y.-L. Chen, and L. Zhu, Periodic-disturbance observer using spectrum-selection filtering scheme for cross-coupling suppression in atomic force microscopy, IEEE Trans. Autom. Sci. Eng.20, 2037 (2023)
2037
-
[32]
J. H. Shirley, Modulation transfer processes in optical heterodyne saturation spectroscopy, Opt. Lett.7, 537 (1982)
1982
-
[33]
D. J. McCarron, S. A. King, and S. L. Cornish, Modu- lation transfer spectroscopy in atomic rubidium, Meas. Sci. Technol.19, 105601 (2008)
2008
-
[34]
H.-R. Noh, S. E. Park, L. Z. Li, J.-D. Park, and C.-H. Cho, Modulation transfer spectroscopy for 87Rb atoms: theory and experiment, Opt. Express19, 23444 (2011)
2011
-
[35]
D. W. Allan, Statistics of atomic frequency standards, Proc. IEEE54, 221 (1966)
1966
-
[36]
D. W. Allan, Time and frequency (time-domain) charac- terization, estimation, and prediction of precision clocks and oscillators, IEEE Trans. Ultrason. Ferroelectr. Freq. Control34, 647 (1987)
1987
-
[37]
S. Lee, G. Moon, S. E. Park, H.-G. Hong, J. H. Lee, S. Seo, T. Y. Kwon, and S.-B. Lee, Laser frequency sta- bilization in the 10 −14 range via optimized modulation transfer spectroscopy on the 87Rb D2 line, Opt. Lett.48, 1020 (2023)
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.