A Post-Processing Conformal Prediction Approach for Conditional Coverage via Pivotal Scores
Pith reviewed 2026-06-29 20:42 UTC · model grok-4.3
The pith
For i.i.d. data, conditional coverage in conformal prediction is equivalent to making the nonconformity score distribution independent of the features.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
For i.i.d. data, finite-sample conditional validity is impossible without assumptions, but the requirement is equivalent to a nonconformity score whose distribution is independent of the features. This motivates PIT-CP, which maps any base nonconformity score to an approximately invariant version via the probability integral transform using one-dimensional conditional density estimation of the induced score. The procedure yields bounds on the conditional coverage gap along with volumetric and symmetric-difference bounds, supports modern estimators such as mixture density networks and conditional normalizing flows, and empirically matches or exceeds state-of-the-art methods while keeping marg
What carries the argument
PIT-CP post-processing, which applies the probability integral transform to the base nonconformity score using its estimated conditional density given the features.
If this is right
- Any existing nonconformity score can be corrected without retraining the underlying model.
- Conditional density estimation is reduced to one dimension on the score rather than the full outcome space.
- The method supplies explicit bounds on the conditional coverage gap.
- Modern one-dimensional conditional density estimators can be substituted directly.
- Empirical performance matches or exceeds existing conditional conformal methods at low added cost.
Where Pith is reading between the lines
- Practitioners with accurate point predictors can add conditional coverage without building full generative models.
- The one-dimensional reduction may enable conditional conformal methods in high-dimensional outcome settings where full density estimation is intractable.
- Analogous pivotal post-processing could be tested on other distribution-free inference tasks.
- Success hinges on the accuracy of the chosen one-dimensional density estimator for the particular score.
Load-bearing premise
The data are i.i.d. and one-dimensional conditional density estimation of the induced score can be performed accurately enough that the coverage gap remains small.
What would settle it
Apply PIT-CP to a fresh i.i.d. dataset and check whether the transformed scores retain clear dependence on features or whether the empirical conditional coverage gap exceeds the derived bounds by more than estimation error.
Figures
read the original abstract
While Conformal Prediction (CP) has proven to be a powerful framework for uncertainty quantification, guaranteeing conditional coverage remains a central challenge. Although finite-sample, distribution-free conditional validity is known to be impossible without structural assumptions, we show that for i.i.d. data, it is fundamentally equivalent to constructing a nonconformity score whose distribution is independent of the features. This theoretical characterization motivates PIT-CP, a new post-processing correction that maps any base nonconformity score to an approximately invariant one while preserving its geometry, interpretability, and marginal coverage. This perspective is particularly appealing in practice, since it may be neither economical nor time-effective to retrain a full generative model when a strong prediction-driven model already provides highly accurate point estimates. Our procedure reduces the problem to one-dimensional conditional density estimation on the induced score, rather than full conditional density estimation on the original outcome space. We show how to estimate this transform in practice and derive bounds on the conditional coverage gap, alongside volumetric and symmetric-difference bounds. We present known minimax-optimal conditional estimation techniques while also motivating the use of modern conditional density estimators, including Mixture Density Networks and Conditional Normalizing Flows. Finally, we empirically demonstrate on various datasets that our PIT-CP procedure matches or outperforms many state-of-the-art conformal prediction strategies with minimal effort and computational cost.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that for i.i.d. data, conditional coverage in conformal prediction is fundamentally equivalent to constructing a nonconformity score whose distribution is independent of the features. This characterization motivates PIT-CP, a post-processing correction that applies the probability integral transform via one-dimensional conditional density estimation on the induced score to produce an approximately feature-invariant score while preserving geometry, interpretability, and marginal coverage. The paper derives bounds on the resulting conditional coverage gap (along with volumetric and symmetric-difference bounds), discusses estimation via MDNs and CNFs, and reports empirical results matching or outperforming existing methods.
Significance. If the equivalence holds and the coverage-gap bounds are non-vacuous under realistic estimation error, the work supplies a computationally lightweight route to approximate conditional coverage that avoids retraining full generative models. The reduction to 1D score-density estimation and the explicit preservation of marginal coverage are concrete strengths; the provision of both theoretical bounds and modern estimator options further strengthens the contribution if the practical gap control can be made rigorous.
major comments (2)
- [Abstract / theoretical characterization] Abstract / theoretical characterization: the asserted fundamental equivalence between conditional coverage and feature-independent score distribution is load-bearing for the entire proposal. The post-processing step, however, replaces the base score with its estimated conditional PIT, so the claimed equivalence becomes approximate and the size of the approximation is governed by the quality of the 1-D conditional density estimator; no explicit rates or sufficient conditions on the estimator (sup-norm or TV error) are supplied to guarantee that the coverage gap remains o(1).
- [Bounds on the conditional coverage gap] Bounds on the conditional coverage gap (abstract): the derived bounds are stated to be controlled by the estimation error of the conditional density, yet the manuscript provides neither convergence rates for MDNs/CNFs on the induced one-dimensional score nor assumptions under which the gap is guaranteed to vanish. This leaves the practical claim that “the gap remains small in practice” dependent on an unverified assumption about estimator accuracy.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review. We respond to each major comment below, clarifying the role of the exact equivalence and the nature of our error bounds.
read point-by-point responses
-
Referee: [Abstract / theoretical characterization] Abstract / theoretical characterization: the asserted fundamental equivalence between conditional coverage and feature-independent score distribution is load-bearing for the entire proposal. The post-processing step, however, replaces the base score with its estimated conditional PIT, so the claimed equivalence becomes approximate and the size of the approximation is governed by the quality of the 1-D conditional density estimator; no explicit rates or sufficient conditions on the estimator (sup-norm or TV error) are supplied to guarantee that the coverage gap remains o(1).
Authors: The equivalence between conditional coverage and a feature-independent (pivotal) score distribution is exact when the conditional distribution of the nonconformity score is known. PIT-CP approximates the probability integral transform using an estimated conditional density, and the manuscript derives explicit bounds on the conditional coverage gap in terms of the estimation error measured in total variation (or related distances). These bounds are non-vacuous and show that the gap vanishes whenever the estimator is consistent. We will add a remark in the theoretical section stating sufficient conditions (uniform consistency of the one-dimensional conditional density estimator in total variation) under which the gap is guaranteed to be o(1), together with a reference to standard consistency results for one-dimensional conditional density estimation. This makes the approximation rigorous without altering the core contribution. revision: partial
-
Referee: [Bounds on the conditional coverage gap] Bounds on the conditional coverage gap (abstract): the derived bounds are stated to be controlled by the estimation error of the conditional density, yet the manuscript provides neither convergence rates for MDNs/CNFs on the induced one-dimensional score nor assumptions under which the gap is guaranteed to vanish. This leaves the practical claim that “the gap remains small in practice” dependent on an unverified assumption about estimator accuracy.
Authors: The derived bounds are deliberately stated in a general form that depends only on the estimation error of the conditional density; any known convergence rate for a chosen estimator (MDN, CNF, or otherwise) can be substituted directly. Because the problem is reduced to one-dimensional conditional density estimation on the score, standard minimax rates from the literature apply under mild smoothness assumptions. We will revise the manuscript to include a short discussion of such assumptions (e.g., Hölder smoothness of the conditional density of the score) and the resulting rates, thereby making explicit the conditions under which the gap vanishes. The empirical results already illustrate that the gap is small with off-the-shelf estimators, but the added discussion will address the theoretical concern. revision: partial
Circularity Check
No significant circularity; derivation self-contained under i.i.d.
full rationale
The paper states an equivalence between conditional coverage and feature-independent nonconformity scores for i.i.d. data, which follows directly from the definition of conditional quantiles equaling the marginal quantile when the score distribution does not depend on X. PIT-CP is introduced as an approximation via estimated conditional PIT transform, with coverage gap bounds expressed explicitly in terms of the sup-norm or TV distance of the conditional CDF estimator. This error term is external to the procedure and not fitted or renamed within the paper. No self-citations are load-bearing, no ansatz is smuggled, and no prediction reduces to a fitted input by construction. The result is therefore independent of its own fitted components.
Axiom & Free-Parameter Ledger
free parameters (1)
- parameters of the conditional density estimator
axioms (1)
- domain assumption Data points are independent and identically distributed (i.i.d.).
Reference graph
Works this paper leans on
-
[1]
Arpogaus, M
M. Arpogaus, M. Voss, B. Sick, M. Nigge-Uricher, and O. D¨ urr. Probabilistic short-term low-voltage load forecasting using bernstein-polynomial normalizing flows. InICML 2021, Workshop Tackling Climate Change with Machine Learning, June 26, 2021, virtual,
2021
-
[2]
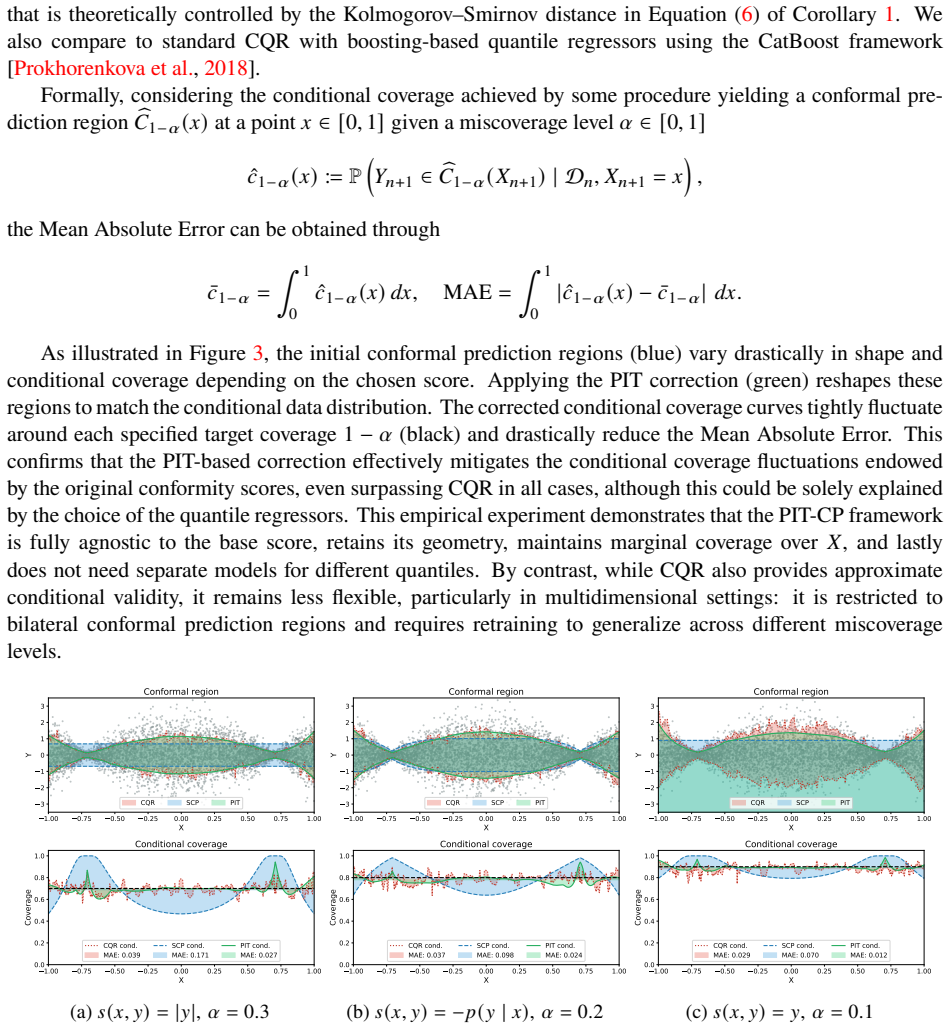
Conditional Coverage Diagnostics for Conformal Prediction
S. Braun, D. Holzm¨ uller, M. I. Jordan, and F. Bach. Conditional coverage diagnostics for conformal prediction.arXiv preprint arXiv:2512.11779,
work page internal anchor Pith review Pith/arXiv arXiv
- [3]
-
[4]
L. Dinh, J. Sohl-Dickstein, and S. Bengio. Density estimation using real nvp.arXiv preprint arXiv:1605.08803,
work page internal anchor Pith review Pith/arXiv arXiv
-
[5]
E. English and C. Lippert. JAPAN: Joint adaptive prediction areas with normalising-flows.arXiv preprint arXiv:2505.23196,
-
[6]
URLhttps://arxiv.org/abs/ 2511.08667. L. Guan. Localized conformal prediction: A generalized inference framework for conformal prediction. Biometrika, 110(1):33–50,
work page internal anchor Pith review Pith/arXiv arXiv
- [7]
-
[8]
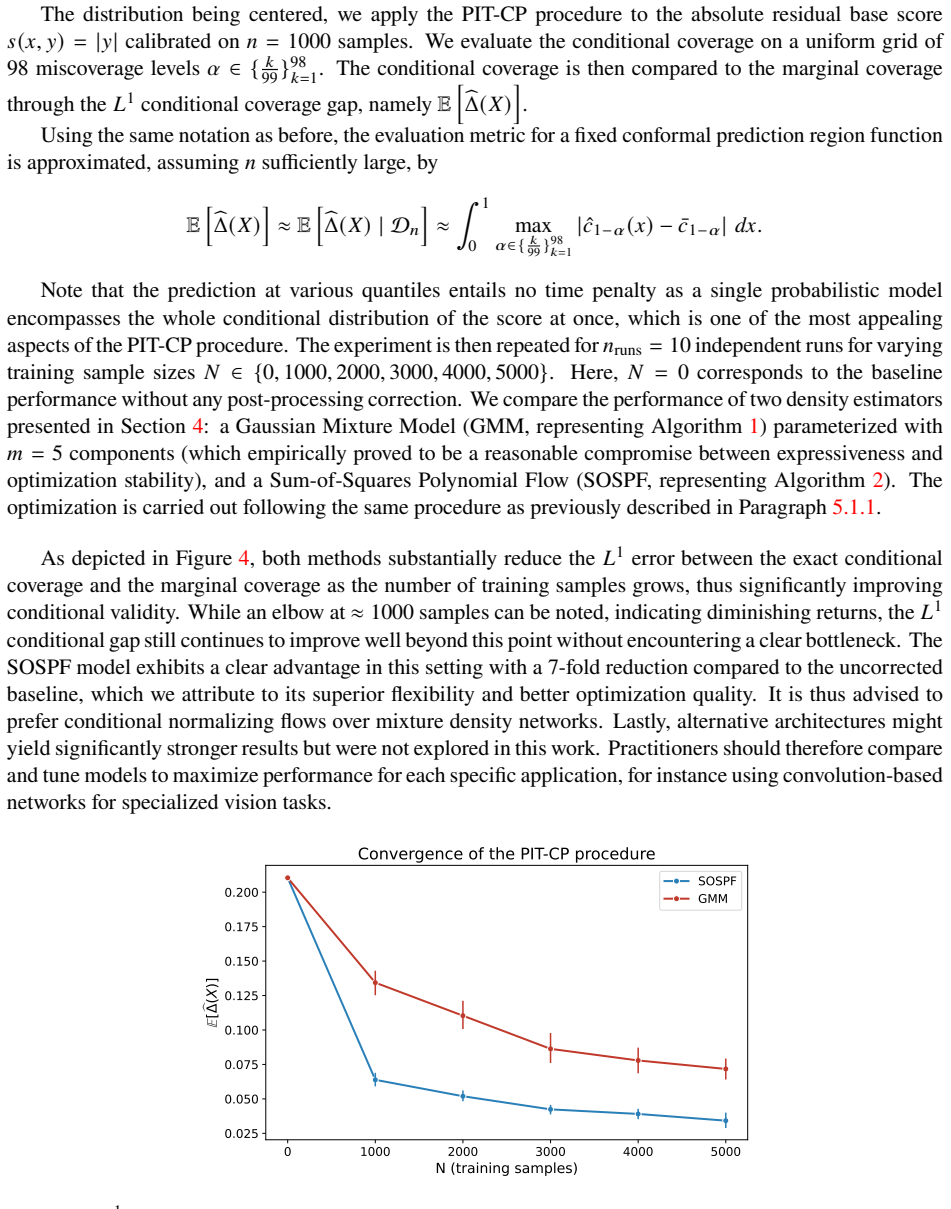
Accurate predictions on small data with a tabular foundation model.Nature, 637(8045):319–326, 2025
doi: 10.1038/s41586-024-08328-6. URLhttps://www.nature.com/articles/s41586-024-08328-6. R. Hore and R. F. Barber. Conformal prediction with local weights: randomization enables local guarantees. arXiv preprint arXiv:2310.07850,
-
[9]
D. P. Kingma and J. Ba. Adam: A method for stochastic optimization.arXiv preprint arXiv:1412.6980,
work page internal anchor Pith review Pith/arXiv arXiv
-
[10]
M. Matabuena, R. Ghosal, P. Mozharovskyi, O. H. M. Padilla, and J.-P. Onnela. Conformal uncertainty quantification using kernel depth measures in separable hilbert spaces.arXiv preprint arXiv:2405.13970,
-
[11]
25 E. F. Mendes and W. Jiang. Convergence rates for mixture-of-experts.arXiv preprint arXiv:1110.2058,
work page internal anchor Pith review Pith/arXiv arXiv 2058
-
[12]
Papadopoulos, A
H. Papadopoulos, A. Gammerman, and V. Vovk. Normalized nonconformity measures for regression conformal prediction. InProceedings of the IASTED International Conference on Artificial Intelligence and Applications (AIA 2008), pages 64–69,
2008
-
[13]
V. Plassier, A. Fishkov, M. Guizani, M. Panov, and E. Moulines. Probabilistic conformal prediction with approximate conditional validity.arXiv preprint arXiv:2407.01794,
-
[14]
V. Plassier, A. Fishkov, V. Dheur, M. Guizani, S. B. Taieb, M. Panov, and E. Moulines. Rectifying conformity scores for better conditional coverage.arXiv preprint arXiv:2502.16336,
- [15]
-
[16]
Vijayakumar and S
S. Vijayakumar and S. Schaal. Locally weighted projection regression: An o (n) algorithm for incremental real time learning in high dimensional space.Proceedings of the Seventeenth International Conference on Machine Learning (ICML 2000), 1:288–293,
2000
-
[17]
sup 𝛼∈ (0,1) 𝐹𝑆|𝑋=𝑥 (ˆ𝑞1−𝛼 ) −𝐹 𝑆 (ˆ𝑞1−𝛼 ) # ≤E
26 A Proofs A.1 Proof of Theorem 1 Proof.We first show the implication(2)=⇒ (1). By the definition of the split conformal prediction region, the conditional coverage probability simplifies to the probability of the test score falling below the threshold, and thus for all𝑛≥1,𝛼∈ (0,1), and almost all𝑥∈ X P 𝑌𝑛+1 ∈ b𝐶1−𝛼 (𝑥) |𝑋 𝑛+1 =𝑥 =P(𝑆 𝑛+1 ≤ˆ𝑞1−𝛼 |𝑋 𝑛+1 =...
2017
-
[18]
28 Under Assumption 5, b𝐹𝑆|𝑋=𝑥 is continuous, meaning it satisfies the intermediate value property and its image covers the whole interval(0,1)
□ A.4 Proof of Lemma 2 Proof.For the first inequality (4), by the triangle inequality, letting𝑈be the CDF of a Unif(0,1)random variable, we use Lemma 1 and 𝑑𝐾 𝑆(𝐹b𝑆|𝑋=𝑥 , 𝐹b𝑆) ≤𝑑 𝐾 𝑆(𝐹b𝑆|𝑋=𝑥 , 𝑈) +𝑑 𝐾 𝑆(𝑈, 𝐹b𝑆).(7) For the first term of Equation (7), since b𝑆takes values in(0,1), one gets 𝑑𝐾 𝑆(𝐹b𝑆|𝑋=𝑥 , 𝑈)=sup 𝑡∈R 𝐹b𝑆|𝑋=𝑥 (𝑡) −𝑈(𝑡) =sup 𝑡∈ (0,1) 𝐹b𝑆|𝑋=𝑥 (...
1990
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.