Reproducibility Companion Paper: Swarical: An Integrated Hierarchical Approach to Localizing Flying Light Specks
Pith reviewed 2026-06-29 19:18 UTC · model grok-4.3
The pith
The artifacts and instructions enable reproduction of the finding that Swarical's online localization technique for flying light specks is fast and highly accurate.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that the supplied artifacts and instructions enable reproduction of the result that the online localization technique is fast and highly accurate.
What carries the argument
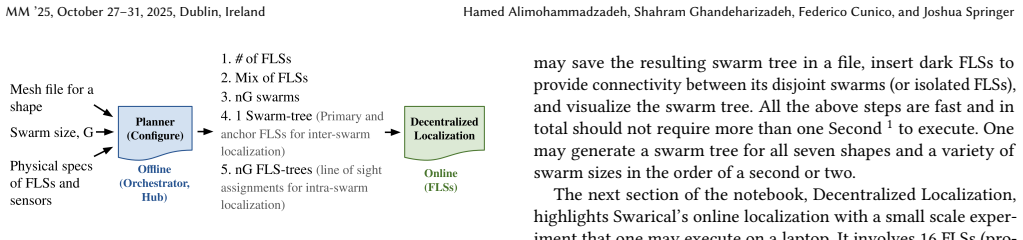
The offline planner that converts mesh files into swarms of FLSs using sensor specifications together with the online localization technique that executes on individual FLSs.
If this is right
- Researchers can execute the artifacts to check the reported speed and accuracy of the online localization.
- The mesh-to-swarm conversion can be tested with new input files to produce FLS arrangements.
- The full hierarchical method can be evaluated on hardware that matches the stated sensor specifications.
Where Pith is reading between the lines
- If reproduction succeeds, the distinction between dark localization FLSs and illuminating ones could be tested in larger swarms for effects on overall system performance.
- The artifacts might support applying the same offline-plus-online split to other drone-based positioning tasks beyond shape illumination.
- Discrepancies during reproduction could highlight the need for more detail on how sensor data influences the online component.
Load-bearing premise
The supplied artifacts are complete, correctly implement the offline planner and online localization components, and match the sensor specifications and mesh conversion process described in the original work.
What would settle it
Running the artifacts on matching hardware and obtaining localization times or accuracy levels that differ from the reported values, or obtaining swarms that do not match the original mesh conversion descriptions.
Figures
read the original abstract
This companion paper provides artifacts and instructions on replicating the experiments in the ACM Multimedia 2024 paper entitled "Swarical: An Integrated Hierarchical Approach to Localizing Flying Light Specks." Swarm-based hierarchical, Swarical, is a localization technique that enables miniature drones, Flying Light Specks (FLSs), to accurately and efficiently localize and illuminate complex 2D and 3D shapes. It consists of two components, an offline planner and an online localization technique that executes on an FLS. The offline planner uses the FLS sensor specification for positioning to convert mesh files into swarms of FLSs. Some FLSs are dark and used only for localization. We reported the online localization technique to be fast and highly accurate. We describe how to reproduce this finding using our artifacts.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This reproducibility companion paper supplies artifacts and instructions for replicating the experiments reported in the ACM Multimedia 2024 paper on Swarical. The central claim is that the supplied artifacts enable reproduction of the finding that the online localization technique is fast and highly accurate. The work consists of an offline planner that converts mesh files into swarms of Flying Light Specks (FLSs) using the FLS sensor specification (with some FLSs reserved for localization only) and an online localization component executed on the FLSs.
Significance. Reproducibility companions that furnish concrete artifacts strengthen validation of experimental claims in multimedia and swarm robotics. If the artifacts correctly implement the mesh-to-swarm conversion and the online localization procedure as described, the companion directly supports independent verification of the reported speed and accuracy, which is valuable for a technique aimed at illuminating complex 2D and 3D shapes with miniature drones.
minor comments (2)
- [Abstract] The abstract states that the artifacts enable reproduction of the accuracy claim but does not list the precise quantitative thresholds (e.g., error bounds or timing targets) that constitute 'fast and highly accurate'; adding these in §1 or a dedicated reproduction section would make the reproduction target explicit.
- The description of the offline planner mentions 'mesh files' and 'FLS sensor specification' without naming the file formats, coordinate conventions, or exact sensor parameters used; a table or subsection listing these would improve clarity for users attempting replication.
Simulated Author's Rebuttal
We thank the referee for their review and for recommending minor revision. The report contains no specific major comments requiring point-by-point responses.
Circularity Check
No significant circularity; reproducibility companion with no derivations
full rationale
The paper is a reproducibility companion describing artifacts and instructions to replicate experiments from a prior ACM Multimedia 2024 work. It contains no mathematical derivations, equations, fitted parameters, predictions, or uniqueness theorems. The central claim is that supplied artifacts enable reproduction of reported speed and accuracy for the online localization component; this is an empirical replication statement, not a derivation that reduces to its own inputs by construction. No self-citation load-bearing steps, ansatzes, or renamings of known results appear. The paper is self-contained as replication documentation against external benchmarks (the original experiments).
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Hamed Alimohammadzadeh, Rohit Bernard, Yang Chen, Trung Phan, Prashant Singh, Shuqin Zhu, Heather Culbertson, and Shahram Ghandeharizadeh. 2023. Dronevision: An Experimental 3D Testbed for Flying Light Specks. InThe First International Conference on Holodecks(Los Angeles, California)(Holodecks ’23). Mitra LLC, Los Angeles, CA, USA, 1–9. doi:10.61981/ZFSH2301
-
[2]
Hamed Alimohammadzadeh, Heather Culbertson, and Shahram Ghande- harizadeh. 2024. An Evaluation of Decentralized Group Formation Techniques for Flying Light Specks. InProceedings of the 5th ACM International Conference on Multimedia in Asia(Tainan, Taiwan)(MMAsia ’23). Association for Computing Machinery, New York, NY, USA, Article 84, 7 pages. doi:10.1145...
-
[3]
Hamed Alimohammadzadeh and Shahram Ghandeharizadeh. 2023. SwarMer: A Decentralized Localization Framework for Flying Light Specks. InThe First International Conference on Holodecks(Los Angeles, California)(Holodecks ’23). Mitra LLC, Los Angeles, CA, USA, 10–22. doi:10.61981/ZFSH2302
-
[4]
Hamed Alimohammadzadeh and Shahram Ghandeharizadeh. 2024. Swarical: An Integrated Hierarchical Approach to Localizing Flying Light Specks. InProceed- ings of the 32nd ACM International Conference on Multimedia(Melbourne VIC, Australia)(MM ’24). Association for Computing Machinery, New York, NY, USA, 6153–6161. doi:10.1145/3664647.3681080
-
[5]
Hamed Alimohammadzadeh and Shahram Ghandeharizadeh. 2024. Swazure: Swarm Measurement of Pose for Flying Light Specks. InThe Second International Reproducibility Companion Paper: Swarical: An Integrated Hierarchical Approach to Localizing Flying Light Specks MM ’25, October 27–31, 2025, Dublin, Ireland Conference on Holodecks(Los Angeles, California)(Holod...
-
[6]
Hamed Alimohammadzadeh and Shahram Ghandeharizadeh. 2025. Illuminating English Letters Using a Flying Light Speck. InProceedings of the 3rd International Workshop on UA Vs in Multimedia: Capturing the World from a New Perspective (Dublin, Ireland)(UA VM ’25). Association for Computing Machinery, New York, NY, USA, 5 pages. doi:10.1145/3728482.3757388
-
[7]
Hamed Alimohammadzadeh, Daryon Mehraban, and Shahram Ghandeharizadeh
-
[8]
InACM Multimedia Systems(Vancouver, Canada)(MMSys ’23)
Modeling Illumination Data with Flying Light Specks. InACM Multimedia Systems(Vancouver, Canada)(MMSys ’23). Association for Computing Machinery, New York, NY, USA, 363–368. doi:10.1145/3587819.3592544
-
[9]
Hamed Alimohammadzadeh, Shuqin Zhu, Jiadong Bai, and Shahram Ghan- deharizadeh. 2024. Reliability Groups with Standby Flying Light Specks. In Proceedings of the 15th ACM Multimedia Systems Conference(Bari, Italy)(MM- Sys ’24). Association for Computing Machinery, New York, NY, USA, 1–11. doi:10.1145/3625468.3647606
-
[10]
Hamed Alimohammadzadeh, Shuqin Zhu, and Shahram Ghandeharizadeh. 2025. Techniques to Conceal Dark Standby Flying Light Specks.ACM Trans. Multimedia Comput. Commun. Appl.(April 2025). doi:10.1145/3724399 Just Accepted
-
[11]
Yang Chen, Hamed Alimohammadzadeh, Heather Culbertson, and Shahram Ghandeharizadeh. 2023. Towards a Stable 3D Physical Human-Drone Interac- tion. InThe First International Conference on Holodecks(Los Angeles, California) (Holodecks ’23). Mitra LLC, Los Angeles, CA, USA, 34–37. doi:10.61981/ZFSH2308
-
[12]
Yang Chen, Hamed Alimohammadzadeh, Shahram Ghandeharizadeh, and Heather Culbertson. 2023. Towards Enabling Complex Touch-based Human- Drone Interaction.. InIROS Workshop on Human Multi-Robot Interaction(Detroit, USA)
2023
-
[13]
Yang Chen, Hamed Alimohammadzadeh, Shahram Ghandeharizadeh, and Heather Culbertson. 2024. Force-Feedback Through Touch-based Interactions With A Nanocopter. In2024 IEEE Haptics Symposium (HAPTICS). 271–277. doi:10.1109/HAPTICS59260.2024.10520851
-
[14]
Massimiliano Corsini, Paolo Cignoni, and Roberto Scopigno. 2012. Efficient and Flexible Sampling with Blue Noise Properties of Triangular Meshes.IEEE Transactions on Visualization and Computer Graphics18, 6 (2012), 914–924. doi:10. 1109/TVCG.2012.34
2012
-
[15]
Shahram Ghandeharizadeh. 2021. Holodeck: Immersive 3D Displays Using Swarms of Flying Light Specks. InACM Multimedia Asia(Gold Coast, Australia). ACM Press, New York, NY, 1–7. doi:10.1145/3469877.3493698
-
[16]
Shahram Ghandeharizadeh. 2022. Display of 3D Illuminations using Flying Light Specks. InProceedings of the 30th ACM International Conference on Multimedia (Lisboa, Portugal)(MM ’22). Association for Computing Machinery, New York, NY, USA, 2996–3005. doi:10.1145/3503161.3548250
-
[17]
Shahram Ghandeharizadeh. 2025. Flying Light Specks: Dronevision, Holodecks and Spatial Computing. InProceedings of the 3rd International Workshop on Mul- timedia Content Generation and Evaluation: New Methods and Practice (McGE ’25) (Dublin, Ireland)(McGE ’25). Association for Computing Machinery, New York, NY, USA, 2 pages. doi:10.1145/3746278.3759395
-
[18]
Shahram Ghandeharizadeh and Luis Garcia. 2022. Safety in the Emerging Holodeck Applications. InCHI 2022 Workshop on Novel Challenges of Safety, Security and Privacy in Extended Reality
2022
-
[19]
Shahram Ghandeharizadeh and Vincent Oria. 2023. Virtual Reality, Augmented Reality, Mixed Reality, Holograms and Holodecks. InThe First International Conference on Holodecks(Los Angeles, California)(Holodecks ’23). Mitra LLC, Los Angeles, CA, USA, 38–40. doi:10.61981/ZFSH2304
-
[20]
Dirk Merkel. 2014. Docker: Lightweight Linux Containers for Consistent Devel- opment and Deployment.Linux J.2014, 239, Article 2 (March 2014)
2014
-
[21]
Michael Norman, Vince Kellen, Shava Smallen, Brian DeMeulle, Shawn Strande, Ed Lazowska, Naomi Alterman, Rob Fatland, Sarah Stone, Amanda Tan, Katherine Yelick, Eric Van Dusen, and James Mitchell. 2021. CloudBank: Managed Services to Simplify Cloud Access for Computer Science Research and Education. In Practice and Experience in Advanced Research Computin...
-
[22]
Trung Phan, Hamed Alimohammadzadeh, Heather Culbertson, and Shahram Ghandeharizadeh. 2023. An Evaluation of Three Distance Measurement Tech- nologies for Flying Light Specks*. In2023 International Conference on Intelligent Metaverse Technologies & Applications (iMETA). 1–8. doi:10.1109/iMETA59369. 2023.10294597
-
[23]
Kazhdan, and Thomas A
Philip Shilane, Patrick Min, Michael M. Kazhdan, and Thomas A. Funkhouser
-
[24]
The Princeton Shape Benchmark. In2004 International Conference on Shape Modeling and Applications (SMI 2004), 7-9 June 2004, Genova, Italy. IEEE Computer Society, 167–178. doi:10.1109/SMI.2004.1314504
-
[25]
Brian White, Jay Lepreau, Leigh Stoller, Robert Ricci, Shashi Guruprasad, Mac Newbold, Mike Hibler, Chad Barb, and Abhijeet Joglekar. 2002. An Integrated Experimental Environment for Distributed Systems and Networks.SIGOPS Oper. Syst. Rev.36, SI, 255–270. doi:10.1145/844128.844152
-
[26]
Nima Yazdani, Hamed Alimohammadzadeh, and Shahram Ghandeharizadeh. 2023. A Conceptual Model of Intelligent Multimedia Data Rendered using Flying Light Specks. InThe First International Conference on Holodecks(Los Angeles, California) (Holodecks ’23). Mitra LLC, Los Angeles, CA, USA, 38–44. doi:10.61981/ZFSH2309
-
[27]
Nima Yazdani and Shahram Ghandeharizadeh. 2025. Integration of 3D FLS Displays with 3D Authoring Tools. InProceedings of the Third ACM International Workshop on Interactive Extended Reality(Dublin, Ireland)(IXR ’25). ACM Press, New York, NY, 8 pages. doi:10.1145/3746269.3760418
-
[28]
Shuqin Zhu and Shahram Ghandeharizadeh. 2023. Flight Patterns for Swarms of Drones. InThe First International Conference on Holodecks(Los Angeles, Cali- fornia)(Holodecks ’23). Mitra LLC, Los Angeles, CA, USA, 29–33. doi:10.61981/ ZFSH2303
2023
-
[29]
Shuqin Zhu and Shahram Ghandeharizadeh. 2024. Circular Flight Patterns for Dronevision. InThe Second International Conference on Holodecks(Los Angeles, California)(Holodecks ’24). Mitra LLC, Los Angeles, CA, USA, 1–11. doi:10.61981/ ZFSH2404
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.