Decoupled Intelligence: A Multi-Agent LLM Framework for Controllable Traffic Scenario Generation in SUMO
Pith reviewed 2026-06-29 14:29 UTC · model grok-4.3
The pith
Multi-agent LLM framework decouples SUMO traffic simulation into specialized roles to raise success rates and parameter accuracy over single agents.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
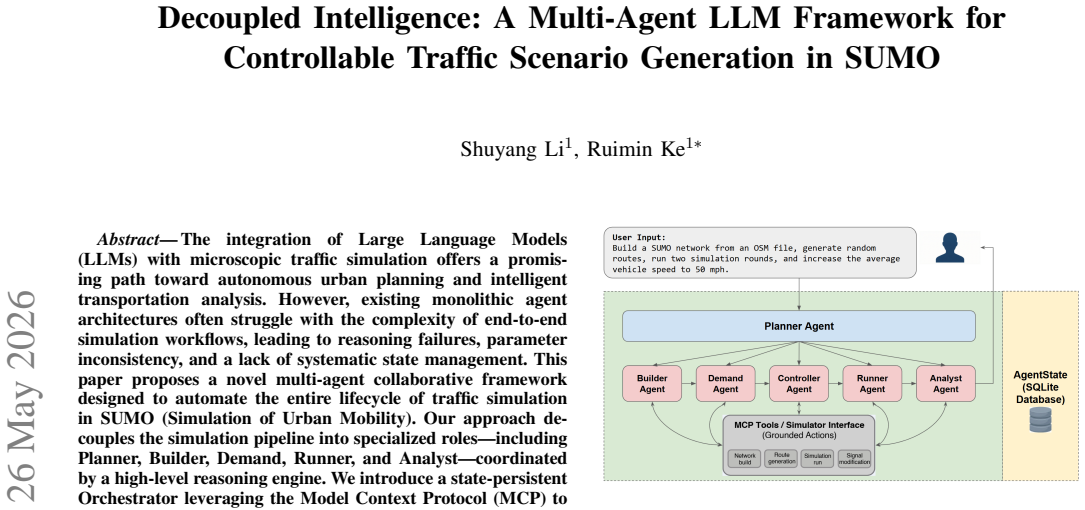
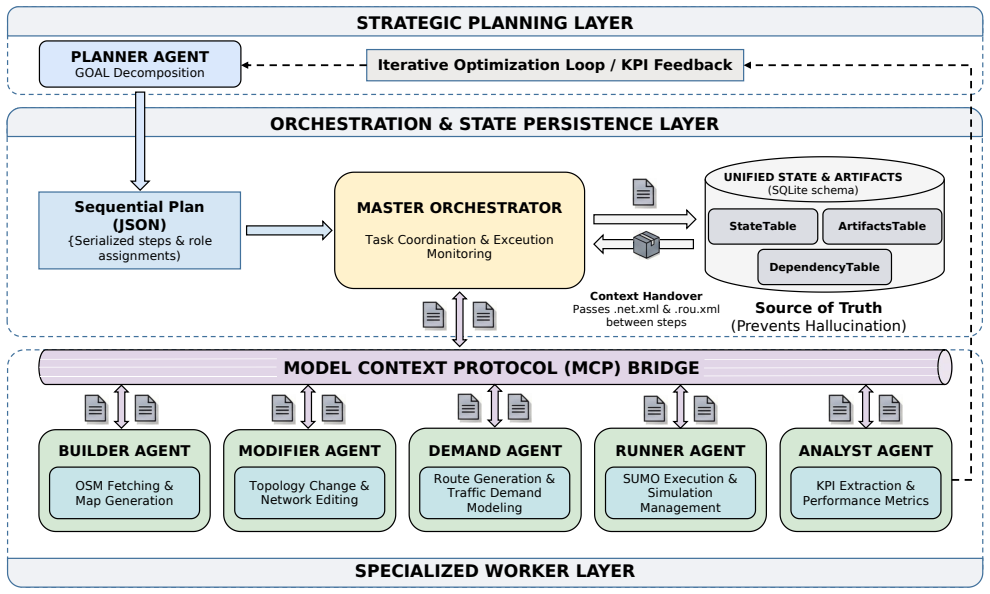
A multi-agent collaborative framework automates the full lifecycle of traffic simulation in SUMO by assigning distinct roles—Planner, Builder, Demand, Runner, and Analyst—coordinated by a high-level reasoning engine and a state-persistent Orchestrator that uses the Model Context Protocol to ensure consistent data handover; the resulting closed-loop process iteratively refines scenarios to meet defined KPIs, yielding measurably higher success rates and parameter accuracy than single-agent baselines.
What carries the argument
Multi-agent role decomposition (Planner, Builder, Demand, Runner, Analyst) plus state-persistent Orchestrator with Model Context Protocol for seamless handoff and closed-loop KPI refinement.
If this is right
- Full automation of SUMO pipelines from natural-language intent to executable files becomes feasible.
- Iterative analysis of simulation outputs can be used to optimize scenarios against user KPIs without manual intervention.
- Role separation reduces reasoning failures and parameter inconsistency seen in monolithic agents.
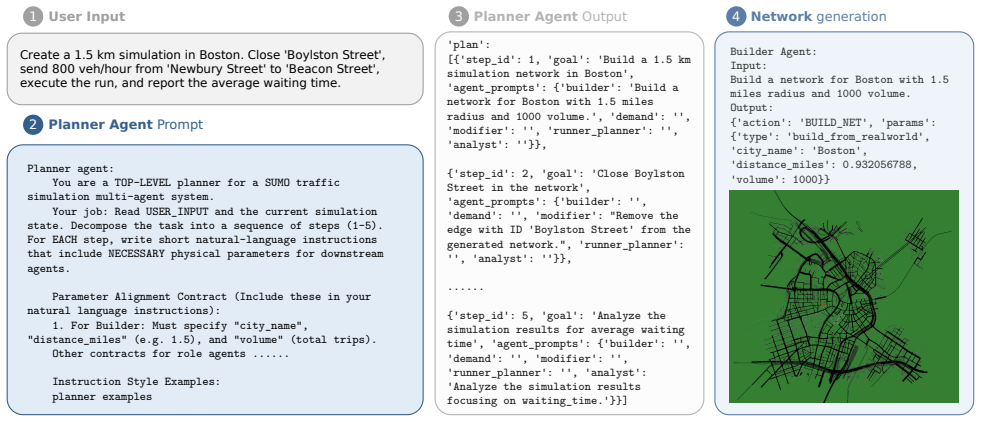
- Case studies show the system can extract real-world networks and optimize traffic directly from high-level descriptions.
Where Pith is reading between the lines
- The same role-splitting pattern could be applied to other agent-based simulators beyond SUMO.
- Persistent state management might reduce the frequency of manual debugging in LLM-driven modeling workflows.
- Integration with live traffic sensors could turn the closed-loop process into an online control system.
Load-bearing premise
Specialized LLM agents will keep performing their assigned roles without introducing compounding errors during repeated refinement cycles in real SUMO workflows.
What would settle it
A controlled test in which a single-agent baseline achieves equal or higher task success rate and parameter accuracy than the multi-agent system on identical SUMO scenario generation prompts.
Figures
read the original abstract
The integration of Large Language Models (LLMs) with microscopic traffic simulation offers a promising path toward autonomous urban planning and intelligent transportation analysis. However, existing monolithic agent architectures often struggle with the complexity of end-to-end simulation workflows, leading to reasoning failures, parameter inconsistency, and a lack of systematic state management. This paper proposes a novel multi-agent collaborative framework designed to automate the entire lifecycle of traffic simulation in SUMO (Simulation of Urban Mobility). Our approach decouples the simulation pipeline into specialized roles, including Planner, Builder, Demand, Runner, and Analyst, coordinated by a high-level reasoning engine. We introduce a state-persistent Orchestrator leveraging the Model Context Protocol (MCP) to ensure seamless data handover and environmental consistency across distributed agent actions. This architecture enables a robust closed-loop refinement process, where simulation outcomes are iteratively analyzed and optimized to satisfy user-defined Key Performance Indicators (KPIs). Experimental results through role ablation studies demonstrate that the proposed multi-agent framework significantly enhances task success rates and parameter accuracy compared to single-agent baselines. Furthermore, case studies on real-world network extraction and traffic optimization highlight the system's capability to bridge the gap between high-level natural language intent and low-level simulation execution.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a multi-agent LLM framework for automating the lifecycle of traffic simulation in SUMO by decoupling the pipeline into specialized roles (Planner, Builder, Demand, Runner, Analyst) coordinated by an Orchestrator using the Model Context Protocol (MCP) for state persistence. It enables a closed-loop refinement process based on user-defined KPIs and claims through role ablation studies that the multi-agent approach significantly improves task success rates and parameter accuracy over single-agent baselines, supported by case studies on real-world network extraction and traffic optimization.
Significance. If the ablation results demonstrate robust improvements, this framework could offer a practical solution to the limitations of monolithic LLM agents in complex simulation workflows, potentially advancing autonomous urban planning applications. The architecture addresses reasoning failures and state management issues in a structured way, and the use of MCP for consistency is a notable engineering choice. The closed-loop KPI refinement is a standard but effective pattern.
major comments (1)
- [Abstract] Abstract: The central claim that the multi-agent framework 'significantly enhances task success rates and parameter accuracy' is asserted without any quantitative results, error bars, dataset details, baseline descriptions, or specific metrics from the role ablation studies. This makes it impossible to evaluate the soundness of the experimental evidence supporting the main contribution.
minor comments (1)
- The abstract mentions 'real-world network extraction' but does not specify the source or scale of the networks used in case studies.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback. We address the single major comment below and agree that revisions to the abstract are warranted.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the multi-agent framework 'significantly enhances task success rates and parameter accuracy' is asserted without any quantitative results, error bars, dataset details, baseline descriptions, or specific metrics from the role ablation studies. This makes it impossible to evaluate the soundness of the experimental evidence supporting the main contribution.
Authors: We agree with this observation. While the full experimental results, including ablation study metrics, success rates, parameter accuracy comparisons, and baseline details, are reported in the manuscript's experimental section, the abstract does not include these quantitative elements. In the revised manuscript we will update the abstract to explicitly state key metrics from the role ablation studies (e.g., success rate improvements and accuracy figures) along with brief baseline and dataset information, ensuring the central claim is directly supported by evidence. revision: yes
Circularity Check
No significant circularity
full rationale
The paper presents an engineering architecture for multi-agent LLM coordination in SUMO simulation, with claims supported solely by role ablation experiments that compare success rates and parameter accuracy against single-agent baselines. No equations, fitted parameters, predictions, or self-citations appear in the provided text that would reduce any result to its inputs by construction. The closed-loop refinement and MCP-based orchestration are described as design choices whose value is assessed empirically, making the argument self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Machine learning advance- ments in urban traffic simulation: A comprehensive survey,
H. Maheshwari, L. Yang, and R. W. Pazzi, “Machine learning advance- ments in urban traffic simulation: A comprehensive survey,”IEEE Open Journal of Intelligent Transportation Systems, 2025
2025
-
[2]
Systematic review on the impact of ai-enhanced traffic simulation on u.s. urban mobility and safety,
M. M. Haque, “Systematic review on the impact of ai-enhanced traffic simulation on u.s. urban mobility and safety,”ASRC Procedia: Global Perspectives in Science and Scholarship, vol. 1, no. 1, pp. 833–861, 2025
2025
-
[3]
Scenediffuser++: City-scale traffic simulation via a generative world model,
S. Tan, J. Luo, J. Lambert, H. Jeon, S. Kulshrestha, Y . Bai, D. Anguelov, M. Tan, and C. M. Jiang, “Scenediffuser++: City-scale traffic simulation via a generative world model,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025
2025
-
[4]
Trafficgpt: Viewing, processing and interacting with traffic foundation models,
S. Zhang, D. Fu, W. Lianget al., “Trafficgpt: Viewing, processing and interacting with traffic foundation models,”Transport Policy, vol. 150, pp. 95–105, 2024
2024
-
[5]
Controllable traffic simulation through llm-guided hierarchical rea- soning and refinement,
Z. Liu, L. Li, Y . Wang, H. Lin, H. Cheng, Z. Liu, L. He, and J. Wang, “Controllable traffic simulation through llm-guided hierarchical rea- soning and refinement,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
2025
-
[6]
Agents-llm: Aug- mentative generation of challenging traffic scenarios with an agentic llm framework,
Y . Yao, S. Bhatnagar, M. Mazzola, V . Belagiannis, I. Gilitschenski, L. Palmieri, S. Razniewski, and M. Hallgarten, “Agents-llm: Aug- mentative generation of challenging traffic scenarios with an agentic llm framework,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
2025
-
[7]
Microscopic traffic simulation using sumo,
P. A. Lopez, M. Behrisch, L. Bieker-Walz, J. Erdmann, Y .-P. Fl¨otgelow, R. Hilbrich, L. L ¨ucken, J. Rummel, P. Wagner, and E. Wießner, “Microscopic traffic simulation using sumo,” in21st International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2018, pp. 2575–2582
2018
-
[8]
Chatsumo: Large language model for automating traffic scenario generation in simulation of urban mobility,
S. Li, T. Azfar, and R. Ke, “Chatsumo: Large language model for automating traffic scenario generation in simulation of urban mobility,” IEEE Transactions on Intelligent Vehicles, 2024
2024
-
[9]
Why Do Multi-Agent LLM Systems Fail?
M. Cemri, M. Z. Pan, S. Yang, R. Tiwari, A. Kannan, B. Chopra, K. Keutzer, K. Ramchandran, M. Zaharia, L. A. Agrawalet al., “Why do multi-agent llm systems fail?”arXiv preprint arXiv:2503.13657, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[10]
AutoGen: Enabling Next-Gen LLM Applications via Multi-Agent Conversation
Q. Wu, G. Bansal, J. Zhang, Y . Wu, B. Li, E. Zhu, L. Jiang, X. Zhang, S. Zhang, J. Liuet al., “Autogen: Enabling next-gen llm applications via multi-agent conversation,”arXiv preprint arXiv:2308.08155, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[11]
Multi-Agent Collaboration Mechanisms: A Survey of LLMs
K.-T. Tran, D. Dao, M.-D. Nguyen, Q.-V . Pham, B. O’Sullivan, and H. D. Nguyen, “Multi-agent collaboration mechanisms: A survey of llms,”arXiv preprint arXiv:2501.06322, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[12]
Model context protocol (mcp) specification,
Anthropic, “Model context protocol (mcp) specification,” https://modelcontextprotocol.io, 2024
2024
-
[13]
Sumo- mcp: Leveraging the model context protocol for autonomous traffic simulation and optimization,
C. Ye, G. Xiong, J. Shang, X. Dai, X. Gong, and Y . Lv, “Sumo- mcp: Leveraging the model context protocol for autonomous traffic simulation and optimization,”arXiv preprint arXiv:2506.03548, 2025
-
[14]
Reflexion: Language agents with verbal reinforcement learning,
N. Shinn, F. Cassano, A. Gopinath, K. Narasimhan, and S. Yao, “Reflexion: Language agents with verbal reinforcement learning,” inAdvances in Neural Information Processing Systems (NeurIPS), vol. 36, 2023
2023
-
[15]
Chatscene: Knowledge-enabled safety- critical scenario generation for autonomous vehicles,
J. Zhang, C. Xu, and B. Li, “Chatscene: Knowledge-enabled safety- critical scenario generation for autonomous vehicles,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recog- nition (CVPR), 2024
2024
-
[16]
Chatsumo agent: An llm-based agent for conversational traffic simulation in sumo,
S. Li, M. Ma, T. Azfar, and R. Ke, “Chatsumo agent: An llm-based agent for conversational traffic simulation in sumo,”Transportation Research Part C: Emerging Technologies, vol. 190, p. 105759, 2026. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0968090X26002470
2026
-
[17]
M. Jeong, J. Chang, and Y . Yoon, “Agentsumo: An agentic framework for interactive simulation scenario generation in sumo via large language models,” 2025. [Online]. Available: https://arxiv.org/abs/2511.06804
-
[18]
Trafficsimagent: A hierarchical agent framework for autonomous traffic simulation with mcp control,
Y . Du, J. Zhang, J. Feng, Z. Liu, J. Yuan, and Y . Li, “Trafficsimagent: A hierarchical agent framework for autonomous traffic simulation with mcp control,”arXiv preprint arXiv:2512.20996, 2025
-
[19]
Multi-Agent Collaboration: Harnessing the Power of Intelligent LLM Agents
Y . Talebirad and A. Nadiri, “Multi-agent collaboration: Harnessing the power of intelligent llm agents,”arXiv preprint arXiv:2306.03314, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[20]
Multi-agent design: Optimizing agents with better prompts and topologies,
H. Zhou, X. Wan, R. Sun, H. Palangi, S. Iqbal, I. Vuli ´c, A. Korhonen, and S. ´’O. Arık, “Multi-agent design: Optimizing agents with better prompts and topologies,” 2026. [Online]. Available: https://arxiv.org/abs/2502.02533
-
[21]
Metagpt: Meta programming for a multi-agent collaborative framework,
S. Hong, M. Zhuge, J. Chen, X. Zheng, Y . Cheng, C. Zhang, J. Wang, Z. Wang, S. K. Yau, Z. Linet al., “Metagpt: Meta programming for a multi-agent collaborative framework,” inThe Twelfth International Conference on Learning Representations (ICLR), 2024
2024
-
[22]
Communicative agents for software development,
C. Qian, X. Cong, C. Yang, W. Chen, Y . Su, J. Xu, Z. Liu, and M. Ma, “Communicative agents for software development,” inProceedings of the 62nd Annual Meeting of the Association for Computational Linguistics (ACL), 2024
2024
-
[23]
Toward adaptive and coordinated transportation systems: A multi-personality multi- agent meta-reinforcement learning framework,
S. Huang, C. Sun, R.-Q. Wang, and D. Pompili, “Toward adaptive and coordinated transportation systems: A multi-personality multi- agent meta-reinforcement learning framework,”IEEE Transactions on Intelligent Transportation Systems, vol. 26, no. 8, pp. 12 148–12 161, 2025
2025
-
[24]
React: Synergizing reasoning and acting in language models,
S. Yao, J. Zhao, D. Yu, N. Du, I. Shafran, K. Narasimhan, and Y . Cao, “React: Synergizing reasoning and acting in language models,” in International Conference on Learning Representations (ICLR), 2023
2023
-
[25]
Toolformer: Language models can teach themselves to use tools,
T. Schick, J. Dwivedi-Yu, R. Dess `ı, R. Raileanu, M. Lomeli, L. Zettle- moyer, N. Cancedda, and T. Scialom, “Toolformer: Language models can teach themselves to use tools,” inAdvances in Neural Information Processing Systems (NeurIPS), vol. 36, 2023
2023
-
[26]
Advancing multi-agent traffic simulation via r1-style reinforcement fine-tuning,
M. Pei, S. Shi, and S. Shen, “Advancing multi-agent traffic simulation via r1-style reinforcement fine-tuning,”arXiv preprint arXiv:2509.23993, 2025. APPENDIXI SYSTEMPROMPTSUSED IN THEMULTI-AGENT FRAMEWORK BASE_SYSTEM_PROMPT = """You are a specialized agent for a SUMO traffic simulation system. STRICT OUTPUT RULE: - Return EXACTLY ONE JSON object. No code...
-
[27]
city_name
For Builder: Must specify "city_name", "distance_miles" (e.g. 1.5), and "volume" (total trips)
-
[28]
op" (remove_edge, tls_optimize_and_apply) and
For Modifier (Network Modification): - Use ONLY if the user explicitly asks to modify, remove, or optimize the network/TLS. - Specify "op" (remove_edge, tls_optimize_and_apply) and "target_id" (edge_id or tls_id)
-
[29]
from_edge
For Demand (CRITICAL Logic): - IF specific locations: Specify "from_edge", "to_edge", and "vph". *Example*: "Generate flow from Main Street to Congress Street with 800 vph." - ELSE: Specify "flows" (total vehicles). *Example*: "Generate 1200 random flows for the network."
-
[30]
gui" is needed and
For Runner: Specify if "gui" is needed and "steps" limit
-
[31]
". Rules: - Output MUST be valid JSON only. - Road name handling: Use original OSM names with spaces (e.g.,
For Analyst: Specify the "metric" (mean_speed, co2, travel_time, or waiting_time). Pipeline Policy: - Sequence Logic: Network must be fully ready before Demand generation. - Standard flow (4 steps): Builder -> Demand -> Runner -> Analyst. - Modification flow (5 steps): Builder -> Modifier -> Demand -> Runner -> Analyst. - Each step MUST contain ONLY ONE a...
-
[32]
Troy", "Albany
If the instruction mentions a city name (e.g., "Troy", "Albany"), you MUST use "type": "build_from_realworld"
-
[33]
type": "roundabout
Only use "type": "roundabout" if the user explicitly asks for a generic roundabout. STRICT PARAMETER RULE: - For "build_from_realworld": - REQUIRED: "city_name" (string), "distance_miles" (float), "volume" (int). - Do NOT include "radius" or "lanes" unless building a roundabout. - Your "params" object MUST be flat. Do NOT wrap it in extra keys like "OSM"....
-
[34]
from Main St to State St
IF the user specified specific streets or a path (e.g., "from Main St to State St"): - Use "type": "generate_flow_route" - Params: {"from_edge": str, "to_edge": str, "vph": int}
-
[35]
type": "build_routes_random
ELSE (If only ’medium traffic’, ’1000 vehicles’, or no specific path is mentioned): - Use "type": "build_routes_random" - Params: {"flows": int} (default flows to 1000 if not specified) STRICT RULE: - Do NOT hallucinate edge IDs. If the user mentions street names, use the street names as strings. - Only use ’generate_flow_route’ if both ’from’ and ’to’ lo...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.