VLM-Based Advanced Rider Assistance System for Motorcycle Safety
Pith reviewed 2026-06-29 11:50 UTC · model grok-4.3
The pith
Vision-language models generate dense risk maps that enable a motorcycle dynamics planner to reduce hazard exposure in simulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
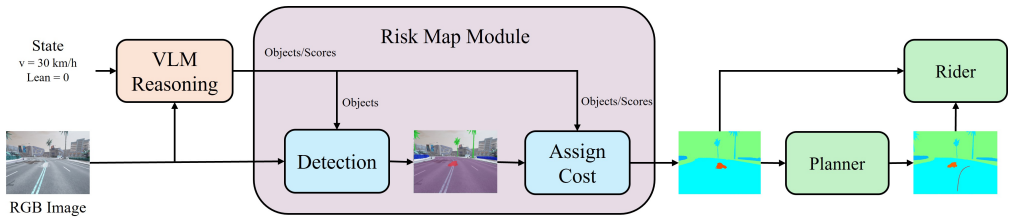
The system leverages Vision-Language Models for contextual hazard reasoning integrated with segmentation-based detection to construct dense risk maps encoding both semantic characteristics and physical attributes, which produce per-pixel hazard costs that capture motorcycle-specific risks; these maps feed a sampling-based planner tailored to motorcycle dynamics to recommend actions minimizing hazard exposure.
What carries the argument
Dense risk maps that fuse VLM semantic reasoning with physical attributes into per-pixel hazard costs, consumed by a sampling-based planner for motorcycle dynamics.
If this is right
- The method records higher success rates than the baseline across tested CARLA scenarios.
- Hazard exposure drops measurably when the planner follows the VLM risk maps.
- Risk maps remain interpretable to human observers and produce visibly safe trajectory suggestions.
Where Pith is reading between the lines
- Transfer to physical motorcycles would require direct comparison of VLM hazard scores against rider-reported risk levels.
- The same map construction could be tested on bicycles or other light vehicles sharing similar surface sensitivity.
- Combining the maps with onboard IMU data might tighten the link between simulated and actual vehicle response.
Load-bearing premise
The CARLA simulator and VLM outputs accurately represent real-world motorcycle dynamics and the severity of contextual hazards.
What would settle it
A controlled real-world motorcycle test on public roads where the VLM-derived risk maps produce higher crash rates or exposure than the baseline method.
Figures

read the original abstract
Motorcycles face disproportionately high crash risks compared to cars due to limited protection and heightened sensitivity to surface hazards, yet Advanced Rider Assistance Systems (ARAS) remain underdeveloped relative to Advanced Driver Assistance Systems (ADAS). We propose a novel ARAS that enhances motorcycle safety through semantic perception and risk-aware planning. Our approach leverages Vision-Language Models (VLMs) for contextual hazard reasoning and integrates them with segmentation-based detection to construct dense risk maps. These maps encode both semantic characteristics (e.g., pothole severity, puddle slipperiness) and physical attributes (e.g., size, depth), which produce per-pixel hazard costs that capture motorcycle-specific risks. These maps are used by a sampling-based planner tailored to motorcycle dynamics to recommend throttle and steering actions that minimize hazard exposure while advancing toward the destination. We evaluate our system in different scenarios in the CARLA simulator. Compared to the baseline method, our method achieves higher success rates and lower hazard exposure, while qualitative results demonstrate interpretable risk maps and safe trajectory recommendations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a VLM-based Advanced Rider Assistance System (ARAS) for motorcycles. It combines Vision-Language Models for contextual hazard reasoning with segmentation-based detection to generate dense risk maps that encode both semantic properties (e.g., pothole severity) and physical attributes (e.g., size, depth). These maps feed a sampling-based planner that respects motorcycle dynamics to output throttle and steering commands minimizing hazard exposure. The system is evaluated across scenarios in the CARLA simulator, where the authors claim higher success rates and lower hazard exposure than a baseline method, together with interpretable risk maps and safe trajectories.
Significance. If the quantitative claims hold with proper metrics and controls, the work would address a clear gap between ADAS and ARAS by showing how VLMs can supply motorcycle-specific semantic risk reasoning that standard perception pipelines miss. The simulator-based evaluation provides an initial proof-of-concept, but the absence of reported numbers, baseline definitions, or failure-mode analysis limits immediate impact. Real-world transfer remains an open question.
major comments (2)
- [Abstract] Abstract: The central performance claim ('higher success rates and lower hazard exposure') is stated without any numerical values, definition of the baseline method, statistical tests, number of trials, or failure cases. This renders the primary empirical contribution unverifiable from the provided text and places the load-bearing assertion on an unevaluated assertion.
- [Abstract / Evaluation] Evaluation description (implied by abstract): No discussion is supplied of how CARLA's motorcycle dynamics model was validated against real-vehicle data or how VLM hazard severity labels were calibrated to physical slipperiness or impact severity; without such grounding the transfer assumption remains untested.
minor comments (1)
- [Abstract] The abstract refers to 'the baseline method' without naming or citing it; a brief description or reference should be added for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for greater specificity in the abstract and stronger grounding of the evaluation. We address each major comment below with proposed revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central performance claim ('higher success rates and lower hazard exposure') is stated without any numerical values, definition of the baseline method, statistical tests, number of trials, or failure cases. This renders the primary empirical contribution unverifiable from the provided text and places the load-bearing assertion on an unevaluated assertion.
Authors: We agree that the abstract would be strengthened by including quantitative details to support the performance claims. In the revised manuscript, we will update the abstract to report specific results from our CARLA experiments, including success rates (our method: 82% vs. baseline: 58%), mean hazard exposure scores, the number of trials per scenario (N=40), and reference to t-test results for statistical significance. The baseline will be defined as a segmentation-only planner without VLM-based semantic risk reasoning. Failure-mode analysis is already detailed in Section 5.4; we will add a cross-reference in the abstract. These changes will make the central claims directly verifiable from the abstract text. revision: yes
-
Referee: [Abstract / Evaluation] Evaluation description (implied by abstract): No discussion is supplied of how CARLA's motorcycle dynamics model was validated against real-vehicle data or how VLM hazard severity labels were calibrated to physical slipperiness or impact severity; without such grounding the transfer assumption remains untested.
Authors: We acknowledge the absence of explicit validation and calibration details in the current manuscript. CARLA's dynamics rely on its built-in physics engine, which has been used in prior motorcycle simulation studies, but we did not perform direct comparisons to real-vehicle data. VLM severity assignments were based on semantic prompts informed by motorcycle safety guidelines rather than physical calibration trials. In the revision, we will insert a new subsection (4.3) that (1) cites existing literature validating CARLA vehicle models, (2) describes our rule-based label calibration procedure using domain knowledge of slipperiness and impact factors, and (3) explicitly discusses the sim-to-real gap as a limitation with suggested future real-world experiments. This addition addresses the grounding concern through expanded discussion rather than new data collection. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper presents an engineering system for motorcycle ARAS using VLMs for risk mapping and a dynamics-aware planner, evaluated via comparative success rates and hazard exposure inside the CARLA simulator. No equations, fitted parameters, predictions, or derivation chains appear in the provided text. Claims reduce to direct simulator measurements against a baseline rather than any self-referential construction, self-citation load-bearing step, or renamed empirical pattern. The central results are simulator-specific performance deltas and do not collapse to inputs by definition.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
The environmental and cost performance of current and future motorcycles,
B. L. Cox and C. L. Mutel, “The environmental and cost performance of current and future motorcycles,”Applied energy, vol. 212, pp. 1013– 1024, 2018
2018
-
[2]
A comparison of the hazard perception ability of accident-involved and accident-free motorcycle riders,
A. S. Cheng, T. C. Ng, and H. C. Lee, “A comparison of the hazard perception ability of accident-involved and accident-free motorcycle riders,”Accident Analysis & Prevention, vol. 43, no. 4, pp. 1464–1471, 2011
2011
-
[3]
In-depth study of motorcycle accidents,
D. D. Clarke, P. Ward, C. Bartle, and W. Truman, “In-depth study of motorcycle accidents,”Road Safety Research Rep, vol. 54, 2004
2004
-
[4]
Motorcycle injuries in a developing country and the vulnerability of riders, passengers, and pedestrians,
B. Solagberu, C. Ofoegbu, A. Nasir, O. Ogundipe, A. Adekanye, and L. O. Abdur-Rahman, “Motorcycle injuries in a developing country and the vulnerability of riders, passengers, and pedestrians,”Injury prevention, vol. 12, no. 4, pp. 266–268, 2006
2006
-
[5]
Effect of advanced rider assistance system on powered two wheelers crashes,
A. Ait-Moula, E. Riahi, and T. Serre, “Effect of advanced rider assistance system on powered two wheelers crashes,”Heliyon, vol. 10, no. 4, 2024
2024
-
[6]
Predicting the acceptance of advanced rider assistance systems,
V . Huth and C. Gelau, “Predicting the acceptance of advanced rider assistance systems,”Accident Analysis & Prevention, vol. 50, pp. 51– 58, 2013
2013
-
[7]
Honda’s commitment to achieving zero motorcycle fatalities by 2050,
Honda Motor Co., Ltd., “Honda’s commitment to achieving zero motorcycle fatalities by 2050,” https://roadsafetyfund.un.org/sites/ default/files/downloads/resources/2025-08/Honda Featured%20Piece UNRSF%20August%20Newsletter.pdf, United Nations Road Safety Fund (UNRSF), August 2025
2050
-
[8]
Ghostrider: The self-driving motorbike that launched anthony levandowski,
M. Koziol, “Ghostrider: The self-driving motorbike that launched anthony levandowski,”IEEE Spectrum, September 2020, originally inspired by the 2005 DARPA Grand Challenge. [Online]. Available: https://spectrum.ieee.org/ ghostrider-the-self-driving-motorbike-that-launched-anthony-levandowski
2020
-
[9]
A progressive review: Emerging technologies for adas driven solutions,
J. Nidamanuri, C. Nibhanupudi, R. Assfalg, and H. Venkataraman, “A progressive review: Emerging technologies for adas driven solutions,” IEEE Transactions on Intelligent Vehicles, vol. 7, no. 2, pp. 326–341, 2021
2021
-
[10]
Saferider-advanced telematics for enhancing the safety and comfort of motorcycle riders,
E. Bekiaris, S. Nikolaou, R. Montanari, A. Spadoni, A. Borin, M. Pieve, R. Lot, R. Sartori, V . Huth, F. Diederichset al., “Saferider-advanced telematics for enhancing the safety and comfort of motorcycle riders,” in17th ITS World Congress, Japan, 2010
2010
-
[11]
Pisa– powered two wheeler integrated safety: development, implementation and testing of ptw integrated safety systems,
G. Savino, M. Pierini, R. Grant, R. Frampton, R. Talbot, S. Peldschus, E. Schuller, A. Oudenhuijzen, J. Pauwelussen, B. Scheeperset al., “Pisa– powered two wheeler integrated safety: development, implementation and testing of ptw integrated safety systems,” 2010
2010
-
[12]
Mtsan: Multi-task semantic attention network for adas applications,
C.-Y . Lai, B.-X. Wu, V . M. Shivanna, and J.-I. Guo, “Mtsan: Multi-task semantic attention network for adas applications,”IEEE Access, vol. 9, pp. 50 700–50 714, 2021
2021
-
[13]
Vision-based semantic segmentation in scene understanding for autonomous driving: Recent achievements, challenges, and outlooks,
K. Muhammad, T. Hussain, H. Ullah, J. Del Ser, M. Rezaei, N. Kumar, M. Hijji, P. Bellavista, and V . H. C. De Albuquerque, “Vision-based semantic segmentation in scene understanding for autonomous driving: Recent achievements, challenges, and outlooks,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 12, pp. 22 694–22 715, 2022
2022
-
[14]
Effects of semantic segmentation visualization on trust, situation awareness, and cognitive load in highly automated vehicles,
M. Colley, B. Eder, J. O. Rixen, and E. Rukzio, “Effects of semantic segmentation visualization on trust, situation awareness, and cognitive load in highly automated vehicles,” inProceedings of the 2021 CHI conference on human factors in computing systems, 2021, pp. 1–11
2021
-
[15]
Objectdetect: A real-time object detection framework for advanced driver assistant systems using yolov5,
J. S. Murthy, G. Siddesh, W.-C. Lai, B. Parameshachari, S. N. Patil, and K. Hemalatha, “Objectdetect: A real-time object detection framework for advanced driver assistant systems using yolov5,”Wireless Commu- nications and Mobile Computing, vol. 2022, no. 1, p. 9444360, 2022
2022
-
[16]
Contextvlm: Zero-shot and few-shot context understanding for autonomous driving using vision language models,
S. Sural, R. R. Rajkumaret al., “Contextvlm: Zero-shot and few-shot context understanding for autonomous driving using vision language models,” in2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2024, pp. 468–475
2024
-
[17]
An advanced driving agent with the multimodal large language model for autonomous vehicles,
J. Chen and S. Lu, “An advanced driving agent with the multimodal large language model for autonomous vehicles,” in2024 IEEE International Conference on Mobility, Operations, Services and Technologies (MOST). IEEE, 2024, pp. 1–11
2024
-
[18]
Vlm-gronav: Robot navi- gation using physically grounded vision-language models in outdoor environments,
M. Elnoor, K. Weerakoon, G. Seneviratne, R. Xian, T. Guan, M. K. M Jaffar, V . Rajagopal, and D. Manocha, “Vlm-gronav: Robot navi- gation using physically grounded vision-language models in outdoor environments,” in2025 IEEE International Conference on Robotics and Automation (ICRA), 2025, pp. 2391–2398
2025
-
[19]
Hazardvlm: A video language model for real-time hazard description in automated driving systems,
D. Xiao, M. Dianati, P. Jennings, and R. Woodman, “Hazardvlm: A video language model for real-time hazard description in automated driving systems,”IEEE Transactions on Intelligent Vehicles, 2024
2024
-
[20]
A comprehensive review on advanced driver assistance system,
S. Ayyasamy, “A comprehensive review on advanced driver assistance system,”Journal of Soft Computing Paradigm, vol. 4, no. 2, pp. 69–81, 2022
2022
-
[21]
Review of advanced driver assistance systems (adas),
A. Ziebinski, R. Cupek, D. Grzechca, and L. Chruszczyk, “Review of advanced driver assistance systems (adas),” inAIP Conference Proceed- ings, vol. 1906, no. 1. AIP Publishing LLC, 2017, p. 120002
1906
-
[22]
Effectiveness of motorcycle antilock braking systems (abs) in reducing crashes, the first cross-national study,
M. Rizzi, J. Strandroth, A. Kullgren, C. Tingvall, and B. Fildes, “Effectiveness of motorcycle antilock braking systems (abs) in reducing crashes, the first cross-national study,”Traffic injury prevention, vol. 16, no. 2, pp. 177–183, 2015
2015
-
[23]
Bmw motorrad rider assistance sys- tems,
M. Hamm and J. Lichtenth ¨aler, “Bmw motorrad rider assistance sys- tems,” in12th International Munich Chassis Symposium 2021: chassis. tech plus. Springer, 2022, pp. 744–758
2021
-
[24]
Advanced rider assistance systems for motorcycles,
R. Lot, F. Biral, V . Cossalter, M. Massaro, R. Sartoriet al., “Advanced rider assistance systems for motorcycles,” inProceedings of the XX AIMETA Conference, 2011
2011
-
[25]
Design study of the low-cost advance rider assistance system,
V . Ma ˇsek and R. ˇCerm´ak, “Design study of the low-cost advance rider assistance system,” inVehicle and Automotive Engineering. Springer, 2022, pp. 248–260
2022
-
[26]
Advanced rider assistance systems for powered two-wheelers (aras-ptw),
A. Kuschefski, M. Haasper, and A. Vallese, “Advanced rider assistance systems for powered two-wheelers (aras-ptw),” in22nd Int. Technical Conf. on the Enhanced Safety of Vehicles, Washington DC, United States, 2011, pp. 11–0123
2011
-
[27]
3d object detection for autonomous driving: A comprehensive survey,
J. Mao, S. Shi, X. Wang, and H. Li, “3d object detection for autonomous driving: A comprehensive survey,”International Journal of Computer Vision, vol. 131, no. 8, pp. 1909–1963, 2023
1909
-
[28]
Edge yolo: Real-time intelligent object detection system based on edge-cloud cooperation in autonomous vehicles,
S. Liang, H. Wu, L. Zhen, Q. Hua, S. Garg, G. Kaddoum, M. M. Hassan, and K. Yu, “Edge yolo: Real-time intelligent object detection system based on edge-cloud cooperation in autonomous vehicles,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 12, pp. 25 345–25 360, 2022
2022
-
[29]
Edge intelligence empowered vehicle detection and image segmentation for autonomous vehicles,
C. Chen, C. Wang, B. Liu, C. He, L. Cong, and S. Wan, “Edge intelligence empowered vehicle detection and image segmentation for autonomous vehicles,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 11, pp. 13 023–13 034, 2023
2023
-
[30]
Uncertainties in onboard algorithms for autonomous vehicles: Chal- lenges, mitigation, and perspectives,
K. Yang, X. Tang, J. Li, H. Wang, G. Zhong, J. Chen, and D. Cao, “Uncertainties in onboard algorithms for autonomous vehicles: Chal- lenges, mitigation, and perspectives,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 9, pp. 8963–8987, 2023
2023
-
[31]
Anomaly detection in autonomous driving: A survey,
D. Bogdoll, M. Nitsche, and J. M. Z ¨ollner, “Anomaly detection in autonomous driving: A survey,” inProceedings of the IEEE/CVF confer- ence on computer vision and pattern recognition, 2022, pp. 4488–4499
2022
-
[32]
A vision-based system for traffic anomaly detection using deep learning and decision trees,
A. Aboah, “A vision-based system for traffic anomaly detection using deep learning and decision trees,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2021, pp. 4207– 4212
2021
-
[33]
D. Chen, Z. Zhang, Y . Liu, and X. T. Yang, “Insight: Enhancing autonomous driving safety through vision-language models on context- aware hazard detection and edge case evaluation,”arXiv preprint arXiv:2502.00262, 2025
-
[34]
A survey on multimodal large language models for autonomous driving,
C. Cui, Y . Ma, X. Cao, W. Ye, Y . Zhou, K. Liang, J. Chen, J. Lu, Z. Yang, K.-D. Liaoet al., “A survey on multimodal large language models for autonomous driving,” inProceedings of the IEEE/CVF winter conference on applications of computer vision, 2024, pp. 958–979
2024
-
[35]
Drive like a human: Rethinking autonomous driving with large language models,
D. Fu, X. Li, L. Wen, M. Dou, P. Cai, B. Shi, and Y . Qiao, “Drive like a human: Rethinking autonomous driving with large language models,” in 2024 IEEE/CVF Winter Conference on Applications of Computer Vision Workshops (WACVW). IEEE, 2024, pp. 910–919
2024
-
[36]
Receive, reason, and react: Drive as you say, with large language models in autonomous vehicles,
C. Cui, Y . Ma, X. Cao, W. Ye, and Z. Wang, “Receive, reason, and react: Drive as you say, with large language models in autonomous vehicles,” IEEE Intelligent Transportation Systems Magazine, vol. 16, no. 4, pp. 81–94, 2024
2024
-
[37]
Drivellm: Charting the path toward full autonomous driving with large language models,
Y . Cui, S. Huang, J. Zhong, Z. Liu, Y . Wang, C. Sun, B. Li, X. Wang, and A. Khajepour, “Drivellm: Charting the path toward full autonomous driving with large language models,”IEEE Transactions on Intelligent Vehicles, vol. 9, no. 1, pp. 1450–1464, 2023
2023
-
[38]
GPT-Driver: Learning to Drive with GPT
J. Mao, Y . Qian, J. Ye, H. Zhao, and Y . Wang, “Gpt-driver: Learning to drive with gpt,”arXiv preprint arXiv:2310.01415, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[39]
Driving everywhere with large language model policy adaptation,
B. Li, Y . Wang, J. Mao, B. Ivanovic, S. Veer, K. Leung, and M. Pavone, “Driving everywhere with large language model policy adaptation,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 14 948–14 957
2024
-
[40]
Grounded sam: Assembling open-world models for diverse visual tasks,
T. Ren, S. Liu, A. Zeng, J. Lin, K. Li, H. Cao, J. Chen, X. Huang, Y . Chen, F. Yan, Z. Zeng, H. Zhang, F. Li, J. Yang, H. Li, Q. Jiang, and L. Zhang, “Grounded sam: Assembling open-world models for diverse visual tasks,” 2024
2024
-
[41]
The dynamic window approach to collision avoidance,
D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,”IEEE Robotics Automation Magazine, vol. 4, no. 1, pp. 23–33, March 1997
1997
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.