Invascal: Inverse-Vacuity Self-Calibration for Uncertainty-Aware LiDAR Range-View Semantic Segmentation
Pith reviewed 2026-06-30 16:58 UTC · model grok-4.3
The pith
An adapter head separating preference from strength, plus an inverse-vacuity objective, produces better-calibrated uncertainty for LiDAR segmentation than softmax or prior evidential methods while keeping accuracy and adding little cost.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
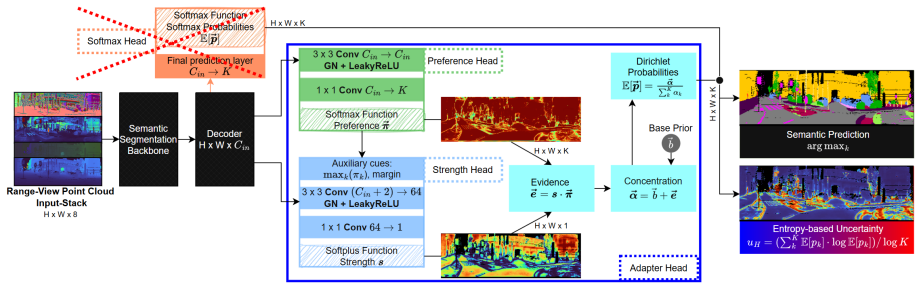
The paper claims that an uncertainty-aware Adapter Head decomposes predictions into a Preference Head for class ranking and a Strength Head, enabling evidential Dirichlet representations, and that the inverse-vacuity self-calibration objective directly supervises the strength signal to deliver reliable, well-calibrated uncertainty estimates that improve over deterministic training with negligible overhead and without the performance degradation seen in prior evidential methods.
What carries the argument
The architecture-agnostic Adapter Head that splits output into a Preference Head and a Strength Head, together with the inverse-vacuity self-calibration objective that prevents runaway evidence growth while supervising uncertainty.
If this is right
- Uncertainty calibration improves over deterministic, Monte Carlo dropout, and ensemble baselines.
- Segmentation accuracy stays competitive across multiple LiDAR datasets and backbone architectures.
- Computational cost remains low enough for real-time operation.
- Evidential Dirichlet representations become available without the accuracy penalty of earlier evidential techniques.
- The adapter design works without changing the underlying segmentation network.
Where Pith is reading between the lines
- The same adapter pattern could be tested on camera-based or radar-based segmentation to check if the calibration benefit transfers.
- If the strength signal proves stable, it might replace post-hoc calibration steps in deployed perception stacks.
- The method opens a route to uncertainty-aware planning that treats low-strength predictions as higher-risk regions.
- Further experiments on long-tail driving scenes could reveal whether the self-calibration holds when class frequencies shift.
Load-bearing premise
Directly supervising the Strength Head with the inverse-vacuity objective will yield reliable calibrated uncertainty without new failure modes or dataset-specific tuning.
What would settle it
Running the method on a new LiDAR dataset and finding that expected calibration error stays the same or worsens while mean intersection-over-union drops would show the claim does not hold.
Figures
read the original abstract
LiDAR semantic segmentation is a core perception capability for autonomous vehicles and mobile robots. However, safe operation also depends on knowing when predictions are unreliable. Existing approaches typically rely on softmax confidence, which is often miscalibrated and overconfident, while stronger uncertainty estimates from Monte Carlo dropout or ensembles are often computationally expensive for real-time use. To this end, we introduce a novel, architecture-agnostic uncertainty-aware Adapter Head. It decomposes the prediction into a Preference Head for class ranking and a Strength Head that refines uncertainty assessment, thereby enabling a principled construction of evidential Dirichlet representations. Building on this design, we propose our inverse-vacuity self-calibration objective (Invascal), which directly supervises the strength signal to produce reliable and well-calibrated uncertainty estimates while preventing runaway evidence growth. We evaluate our framework across multiple LiDAR datasets and backbone architectures. We compare against deterministic training, Monte Carlo dropout and ensembles, and prior evidential methods. Our approach consistently improves uncertainty calibration over traditional deterministic methods with minimal computational overhead. At the same time, it preserves competitive segmentation accuracy, where prior evidential methods often suffer performance degradation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Invascal, an architecture-agnostic Adapter Head for LiDAR range-view semantic segmentation that decomposes predictions into a Preference Head (for class ranking) and a Strength Head (for uncertainty). This enables evidential Dirichlet representations, supervised via a novel inverse-vacuity self-calibration objective that directly targets the strength signal to improve calibration while preventing runaway evidence growth. The method is evaluated across multiple LiDAR datasets and backbones against deterministic training, MC dropout, ensembles, and prior evidential approaches, claiming consistent calibration gains with minimal overhead and preserved competitive mIoU.
Significance. If the central claims hold, the work offers a practical route to reliable, real-time uncertainty quantification in LiDAR perception without the accuracy degradation often seen in evidential methods or the cost of ensembles; this is relevant for safety-critical robotics applications.
major comments (1)
- [§3] §3 (inverse-vacuity objective): the claim that direct supervision of the Strength Head yields reliable, architecture-agnostic Dirichlet uncertainty without new failure modes or dataset-specific tuning is load-bearing for the abstract's performance claims; the manuscript must provide the exact loss formulation and derivation to demonstrate that the objective does not reduce to a fitted parameter by construction or implicitly rely on Preference Head outputs or dataset statistics that vary across LiDAR sets.
minor comments (1)
- Abstract: quantitative calibration metrics (e.g., ECE) and mIoU deltas are absent, making it impossible to assess the magnitude of the reported gains from the summary alone.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We agree that the inverse-vacuity objective requires a more explicit formulation and derivation to support the central claims, and we will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [§3] §3 (inverse-vacuity objective): the claim that direct supervision of the Strength Head yields reliable, architecture-agnostic Dirichlet uncertainty without new failure modes or dataset-specific tuning is load-bearing for the abstract's performance claims; the manuscript must provide the exact loss formulation and derivation to demonstrate that the objective does not reduce to a fitted parameter by construction or implicitly rely on Preference Head outputs or dataset statistics that vary across LiDAR sets.
Authors: We acknowledge that the current presentation of the inverse-vacuity self-calibration objective in §3 would benefit from greater mathematical detail. In the revised manuscript we will add the precise loss equation together with its derivation, explicitly showing that the objective operates solely on the Strength Head output (the evidence strength parameter) and is independent of the Preference Head logits and of any dataset-specific statistics. The added derivation will also confirm that no auxiliary fitted parameters or cross-dataset tuning are introduced, thereby addressing the concern that the method could reduce to a trivial fit by construction. revision: yes
Circularity Check
No circularity; claims rest on empirical evaluation rather than self-referential derivation
full rationale
The provided abstract and description introduce an Adapter Head (Preference + Strength) and Invascal objective as a novel design whose calibration benefits are asserted via comparison to baselines across datasets. No equations, self-citations, or uniqueness theorems are visible that would allow any prediction or result to reduce to its own inputs by construction. The central claim is framed as an empirical outcome of the proposed supervision, not a mathematical identity or fitted parameter renamed as prediction. Absent specific equations from §3 or load-bearing self-citations, the derivation chain cannot be shown to collapse; this is the expected non-finding for an architecture proposal evaluated on external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Kpconv: Flexible and deformable convolution for point clouds,
H. Thomas, C. R. Qi, J. Deschaud, B. Marcotegui, F. Goulette, and L. J. Guibas, “Kpconv: Flexible and deformable convolution for point clouds,” inICCV. IEEE, 2019, pp. 6410–6419. 1
2019
-
[2]
Point transformer V2: grouped vector attention and partition-based pooling,
X. Wu, Y . Lao, L. Jiang, X. Liu, and H. Zhao, “Point transformer V2: grouped vector attention and partition-based pooling,” inNeurIPS,
-
[3]
Point transformer V3: simpler, faster, stronger,
X. Wu, L. Jiang, P. Wang, Z. Liu, X. Liu, Y . Qiao, W. Ouyang, T. He, and H. Zhao, “Point transformer V3: simpler, faster, stronger,” inCVPR. IEEE, 2024, pp. 4840–4851. 1
2024
-
[4]
Cylindrical and asymmetrical 3d convolution networks for lidar segmentation,
X. Zhu, H. Zhou, T. Wang, F. Hong, Y . Ma, W. Li, H. Li, and D. Lin, “Cylindrical and asymmetrical 3d convolution networks for lidar segmentation,” inCVPR. Computer Vision Foundation / IEEE, 2021, pp. 9939–9948. 1
2021
-
[5]
Point-to-voxel knowledge distillation for lidar semantic segmentation,
Y . Hou, X. Zhu, Y . Ma, C. C. Loy, and Y . Li, “Point-to-voxel knowledge distillation for lidar semantic segmentation,” inCVPR. IEEE, 2022, pp. 8469–8478. 1
2022
-
[6]
Polarnet: An improved grid representation for online lidar point clouds semantic segmentation,
Y . Zhang, Z. Zhou, P. David, X. Yue, Z. Xi, B. Gong, and H. Foroosh, “Polarnet: An improved grid representation for online lidar point clouds semantic segmentation,” inCVPR. Computer Vision Foun- dation / IEEE, 2020, pp. 9598–9607. 1
2020
-
[7]
Effi- cientlps: Efficient lidar panoptic segmentation,
K. Sirohi, R. Mohan, D. Büscher, W. Burgard, and A. Valada, “Effi- cientlps: Efficient lidar panoptic segmentation,”IEEE Trans. Robotics, vol. 38, no. 3, pp. 1894–1914, 2022. 1
1914
-
[8]
FLARES: fast and accurate lidar multi-range semantic segmentation,
B. Yang and A. P. Condurache, “FLARES: fast and accurate lidar multi-range semantic segmentation,”CoRR, vol. abs/2502.09274, 2025. 1
-
[9]
Rangenet ++: Fast and accurate lidar semantic segmentation,
A. Milioto, I. Vizzo, J. Behley, and C. Stachniss, “Rangenet ++: Fast and accurate lidar semantic segmentation,” inIROS. IEEE, 2019, pp. 4213–4220. 1
2019
-
[10]
Salsanext: Fast, uncertainty-aware semantic segmentation of lidar point clouds,
T. Cortinhal, G. Tzelepis, and E. E. Aksoy, “Salsanext: Fast, uncertainty-aware semantic segmentation of lidar point clouds,” in ISVC (2), ser. Lecture Notes in Computer Science. Springer, 2020, pp. 207–222. 1, 5, 7
2020
-
[11]
Real time semantic segmentation of high resolution automotive lidar scans,
H. Reichert, B. Serfling, E. Schüssler, K. Turacan, K. Doll, and B. Sick, “Real time semantic segmentation of high resolution automotive lidar scans,” inITSC. IEEE, 2025, pp. 4289–4294. 1, 5, 7
2025
-
[12]
Uncertainty-aware lidar panoptic segmentation,
K. Sirohi, S. Marvi, D. Büscher, and W. Burgard, “Uncertainty-aware lidar panoptic segmentation,” inICRA. IEEE, 2023, pp. 8277–8283. 1, 2, 3, 5, 6
2023
-
[13]
Panoptic-polarnet: Proposal-free lidar point cloud panoptic segmentation,
Z. Zhou, Y . Zhang, and H. Foroosh, “Panoptic-polarnet: Proposal-free lidar point cloud panoptic segmentation,” inCVPR. Computer Vision Foundation / IEEE, 2021, pp. 13 194–13 203. 1
2021
-
[14]
On calibration of modern neural networks,
C. Guo, G. Pleiss, Y . Sun, and K. Q. Weinberger, “On calibration of modern neural networks,” inICML, ser. Proceedings of Machine Learning Research. PMLR, 2017, pp. 1321–1330. 1, 6, 7
2017
-
[15]
Evidential deep learning to quantify classification uncertainty,
M. Sensoy, L. M. Kaplan, and M. Kandemir, “Evidential deep learning to quantify classification uncertainty,” inNeurIPS, 2018, pp. 3183–
2018
-
[16]
Open-set lidar panoptic segmentation guided by uncertainty-aware learning,
R. Mohan, J. Hindel, F. Drews, C. Gläser, D. Cattaneo, and A. Valada, “Open-set lidar panoptic segmentation guided by uncertainty-aware learning,” inIROS. IEEE, 2025, pp. 2224–2231. 1, 2, 3, 5
2025
-
[17]
Bayesian segnet: Model uncertainty in deep convolutional encoder-decoder architectures for scene understanding,
A. Kendall, V . Badrinarayanan, and R. Cipolla, “Bayesian segnet: Model uncertainty in deep convolutional encoder-decoder architectures for scene understanding,” inBMVC. BMV A Press, 2017. 2
2017
-
[18]
What uncertainties do we need in bayesian deep learning for computer vision?
A. Kendall and Y . Gal, “What uncertainties do we need in bayesian deep learning for computer vision?” inNIPS, 2017, pp. 5574–5584. 2
2017
-
[19]
A probabilistic u-net for segmentation of ambiguous images,
S. Kohl, B. Romera-Paredes, C. Meyer, J. D. Fauw, J. R. Ledsam, K. H. Maier-Hein, S. M. A. Eslami, D. J. Rezende, and O. Ronneberger, “A probabilistic u-net for segmentation of ambiguous images,” inNeurIPS, 2018, pp. 6965–6975. 2
2018
-
[20]
Semantickitti: A dataset for semantic scene understanding of lidar sequences,
J. Behley, M. Garbade, A. Milioto, J. Quenzel, S. Behnke, C. Stachniss, and J. Gall, “Semantickitti: A dataset for semantic scene understanding of lidar sequences,” inICCV. IEEE, 2019, pp. 9296–9306. 2, 5
2019
-
[21]
Uncertainty-aware point cloud segmentation for infrastructure projects using bayesian deep learning,
H. Vassilev, M. Laska, and J. Blankenbach, “Uncertainty-aware point cloud segmentation for infrastructure projects using bayesian deep learning,”Automation in Construction, vol. 164, p. 105419, 08 2024. 2
2024
-
[22]
Learning Confidence for Out-of-Distribution Detection in Neural Networks
T. DeVries and G. W. Taylor, “Learning confidence for out-of- distribution detection in neural networks,”CoRR, vol. abs/1802.04865,
work page internal anchor Pith review Pith/arXiv arXiv
-
[23]
Ad- dressing failure prediction by learning model confidence,
C. Corbière, N. Thome, A. Bar-Hen, M. Cord, and P. Pérez, “Ad- dressing failure prediction by learning model confidence,” inNeurIPS, 2019, pp. 2898–2909. 2
2019
-
[24]
Confidence estimation via auxiliary models,
C. Corbière, N. Thome, A. Saporta, T. Vu, M. Cord, and P. Pérez, “Confidence estimation via auxiliary models,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 44, no. 10, pp. 6043–6055, 2022. 2
2022
-
[25]
Fsnet: A failure detection framework for semantic segmentation,
Q. M. Rahman, N. Sünderhauf, P. Corke, and F. Dayoub, “Fsnet: A failure detection framework for semantic segmentation,”IEEE Robotics Autom. Lett., vol. 7, no. 2, pp. 3030–3037, 2022. 2
2022
-
[26]
Scaling out-of-distribution detection for real-world settings,
D. Hendrycks, S. Basart, M. Mazeika, A. Zou, J. Kwon, M. Mostajabi, J. Steinhardt, and D. Song, “Scaling out-of-distribution detection for real-world settings,” inICML, ser. Proceedings of Machine Learning Research. PMLR, 2022, pp. 8759–8773. 2
2022
-
[27]
H. S. Miandashti, Q. Zou, and C. Brenner, “Calibrated and efficient sampling-free confidence estimation for lidar scene semantic segmen- tation,”CoRR, vol. abs/2411.11935, 2024. 2
-
[28]
Uncertainty estimation and out-of-distribution detection for lidar scene semantic segmenta- tion,
H. S. Miandashti, Q. Zou, and M. Mehltretter, “Uncertainty estimation and out-of-distribution detection for lidar scene semantic segmenta- tion,” inECCV Workshops (7), ser. Lecture Notes in Computer Science. Springer, 2024, pp. 116–131. 2
2024
-
[29]
The MNIST database of handwritten digit images for machine learning research [best of the web],
L. Deng, “The MNIST database of handwritten digit images for machine learning research [best of the web],”IEEE Signal Process. Mag., vol. 29, no. 6, pp. 141–142, 2012. 2
2012
-
[30]
Learning multiple layers of features from tiny images,
A. Krizhevsky, “Learning multiple layers of features from tiny images,” 2009. https://api.semanticscholar.org/CorpusID:18268744 2
2009
-
[31]
Identifying out-of-domain objects with dirichlet deep neural networks,
A. Hammam, F. Bonarens, S. E. Ghobadi, and C. Stiller, “Identifying out-of-domain objects with dirichlet deep neural networks,” inICCV (Workshops). IEEE, 2023, pp. 4562–4571. 2
2023
-
[32]
Deep evidential uncertainty esti- mation for semantic segmentation under out-of-distribution obstacles,
S. Ancha, P. R. Osteen, and N. Roy, “Deep evidential uncertainty esti- mation for semantic segmentation under out-of-distribution obstacles,” inICRA. IEEE, 2024, pp. 6943–6951. 2
2024
-
[33]
Posterior network: Un- certainty estimation without OOD samples via density-based pseudo- counts,
B. Charpentier, D. Zügner, and S. Günnemann, “Posterior network: Un- certainty estimation without OOD samples via density-based pseudo- counts,” inNeurIPS, 2020. 2, 3
2020
-
[34]
KITTI-360: A novel dataset and benchmarks for urban scene understanding in 2d and 3d,
Y . Liao, J. Xie, and A. Geiger, “KITTI-360: A novel dataset and benchmarks for urban scene understanding in 2d and 3d,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 45, no. 3, pp. 3292–3310, 2023. 2
2023
-
[35]
Panoptic nuscenes: A large-scale benchmark for lidar panoptic segmentation and tracking,
W. K. Fong, R. Mohan, J. V . Hurtado, L. Zhou, H. Caesar, O. Beijbom, and A. Valada, “Panoptic nuscenes: A large-scale benchmark for lidar panoptic segmentation and tracking,”IEEE Robotics Autom. Lett., vol. 7, no. 2, pp. 3795–3802, 2022. 2
2022
-
[36]
Revisiting essential and nonessential settings of evidential deep learning,
M. Chen, J. Gao, and C. Xu, “Revisiting essential and nonessential settings of evidential deep learning,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 47, no. 10, pp. 8658–8673, 2025. 3
2025
-
[37]
Information aware max-norm dirichlet networks for predictive uncertainty estimation,
T. Tsiligkaridis, “Information aware max-norm dirichlet networks for predictive uncertainty estimation,”Neural Networks, vol. 135, pp. 105– 114, 2021. 3
2021
-
[38]
Is epistemic uncertainty faithfully represented by evidential deep learning methods?
M. Jürgens, N. Meinert, V . Bengs, E. Hüllermeier, and W. Waegeman, “Is epistemic uncertainty faithfully represented by evidential deep learning methods?” inICML, ser. Proceedings of Machine Learning Research. PMLR / OpenReview.net, 2024, pp. 22 624–22 642. 3
2024
-
[39]
Research
G. Research. (2019) Turbo, an improved rain- bow colormap for visualization. https://research.google/blog/ turbo-an-improved-rainbow-colormap-for-visualization/ 5
2019
-
[40]
SemanticTHAB: A high resolution lidar dataset,
H. Reichert, E. Schüssler, B. Serfling, K. Turacan, K. Doll, and B. Sick, “SemanticTHAB: A high resolution lidar dataset,” https://doi.org/10. 5281/zenodo.14906179, Feb. 2025. 5
2025
-
[41]
Panoptic-cudal technical report: Rural australia point cloud dataset in rainy conditions,
T. Tseng, A. Nekrasov, M. Burdorf, B. Leibe, J. S. Berrio, M. Shan, and S. Worrall, “Panoptic-cudal technical report: Rural australia point cloud dataset in rainy conditions,”CoRR, vol. abs/2503.16378, 2025. 5
-
[42]
Sensor equivariance by lidar projection images,
H. Reichert, M. Hetzel, S. Schreck, K. Doll, and B. Sick, “Sensor equivariance by lidar projection images,” inIV. IEEE, 2023, pp. 1–6. 5
2023
-
[43]
Efficientnetv2: Smaller models and faster training,
M. Tan and Q. V . Le, “Efficientnetv2: Smaller models and faster training,” inICML, ser. Proceedings of Machine Learning Research. PMLR, 2021, pp. 10 096–10 106. 5
2021
-
[44]
Rangevit: Towards vision transformers for 3d semantic segmentation in autonomous driving,
A. Ando, S. Gidaris, A. Bursuc, G. Puy, A. Boulch, and R. Marlet, “Rangevit: Towards vision transformers for 3d semantic segmentation in autonomous driving,” inCVPR. IEEE, 2023, pp. 5240–5250. 5
2023
-
[45]
Uncertainty-aware panoptic segmentation,
K. Sirohi, S. Marvi, D. Büscher, and W. Burgard, “Uncertainty-aware panoptic segmentation,”IEEE Robotics Autom. Lett., vol. 8, no. 5, pp. 2629–2636, 2023. 6
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.