DisFlow: Scene Flow from Distance Field for Object Pose, Velocity Tracking, and Dynamic Object Reconstruction
Pith reviewed 2026-06-28 14:32 UTC · model grok-4.3
The pith
DisFlow computes scene flow from distance fields to estimate 6DoF object pose and velocity while reconstructing surfaces via object-frame fusion.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DisFlow computes a scene flow from the distance field that describes how surface points are transported over time in consecutive frames. Through this flow an object's pose and motion are estimated by incrementally registering a new observed point cloud via an elegant closed-form optimisation. Unlike prior methods that operate in the camera or world frame, the approach performs probabilistic fusion directly in the object frame, where the object remains geometrically consistent over time. The tight coupling yields dense geometry, surface normals, object pose trajectories, velocities, and uncertainty, all at real-time rates.
What carries the argument
Scene flow derived from the distance field of Gaussian Process Implicit Surfaces, used for closed-form incremental registration performed inside the object frame.
If this is right
- Pose and velocity estimates become available directly from the same distance-field representation used for surface reconstruction.
- Probabilistic fusion in the object frame produces consistent trajectories without drift from camera motion.
- Surface normals and uncertainty estimates are obtained as by-products of the flow computation at every time step.
- Real-time rates are maintained because registration reduces to a closed-form solution rather than iterative optimisation.
Where Pith is reading between the lines
- The same distance-field flow could be applied to multiple objects by maintaining separate object frames and switching between them when new observations arrive.
- If the closed-form registration step is replaced by a learned prior on typical object velocities, the method might handle brief occlusions without losing track.
- The uncertainty output could be used as an online indicator to decide when to trigger a full re-initialisation of the object model.
Load-bearing premise
The object remains geometrically consistent over time when viewed in its own moving frame.
What would settle it
Run the method on a sequence where the object visibly deforms or changes shape between frames and measure whether the reported uncertainty rises sharply or the closed-form registration fails to converge.
Figures

read the original abstract
We present \emph{DisFlow}, a novel framework for online scene flow estimation from distance field that enables \emph{6DoF dynamic object pose estimation}, \emph{motion tracking}, and \emph{surface reconstruction}. The scene is represented by Gaussian Process Implicit Surfaces (GPIS), with surface normals serving as derivative constraints, enabling accurate signed distance computations near the surface and gradient queries with uncertainty. With this representation as a foundation, we compute a scene flow from the distance field that describes how surface points are transported over time in consecutive frames. Through our flow, we can estimate an object's pose and motion by incrementally registering a new observed point cloud via an elegant closed-form optimisation. Unlike prior methods that operate in the camera or world frame, our approach performs probabilistic fusion directly in the \emph{object frame}, where the object remains geometrically consistent over time. The tight coupling of the DisFlow method in space and time yields dense geometry, surface normals, object pose trajectories, velocities, and uncertainty, all at real-time rates. We evaluate DisFlow on dynamic object sequences and demonstrate that it achieves accurate pose and motion tracking while simultaneously reconstructing high-quality object surfaces. Code publicly available at \href{https://github.com/LanWu076/disflow_ros2}{https://github.com/LanWu076/disflow\_ros2}
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces DisFlow, a framework for online scene flow estimation from distance fields represented via Gaussian Process Implicit Surfaces (GPIS). Surface normals serve as derivative constraints for signed distance and gradient queries with uncertainty. Scene flow is computed from the distance field to enable incremental 6DoF object pose and motion estimation via closed-form optimization for registering new point clouds. Probabilistic fusion occurs directly in the object frame (assuming geometric consistency over time), yielding dense geometry, normals, pose trajectories, velocities, and uncertainty estimates at real-time rates. The manuscript claims evaluation on dynamic object sequences demonstrates accurate tracking and high-quality surface reconstruction, with public code release.
Significance. If the quantitative claims hold, the work could be significant for real-time robotics and dynamic scene understanding, as it provides a parameter-free, closed-form pipeline tightly coupling distance-field scene flow with object-frame fusion and uncertainty propagation—an efficient alternative to frame-based methods that integrates multiple outputs without ad-hoc parameters.
major comments (1)
- [Abstract] Abstract: the claim that DisFlow 'achieves accurate pose and motion tracking while simultaneously reconstructing high-quality object surfaces' on dynamic object sequences is load-bearing for the central contribution, yet the abstract supplies no quantitative metrics, error analysis, baselines, or validation details; the evaluation section must include these to substantiate the accuracy and real-time assertions.
minor comments (1)
- [Abstract] The GitHub link in the abstract uses escaped underscore (\_ros2) which may render incorrectly in some viewers; provide the plain URL.
Simulated Author's Rebuttal
We thank the referee for the constructive comment on the abstract. We agree that including quantitative metrics will better substantiate the claims and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that DisFlow 'achieves accurate pose and motion tracking while simultaneously reconstructing high-quality object surfaces' on dynamic object sequences is load-bearing for the central contribution, yet the abstract supplies no quantitative metrics, error analysis, baselines, or validation details; the evaluation section must include these to substantiate the accuracy and real-time assertions.
Authors: We agree that the abstract would be strengthened by summarizing key quantitative results. In the revised manuscript, we will update the abstract to concisely report representative metrics from the evaluation section, including average 6DoF pose errors (e.g., translation/rotation RMSE), velocity tracking accuracy, surface reconstruction quality (e.g., mean distance to ground-truth surfaces), and real-time runtime figures, along with brief mention of baselines where comparisons are performed. The evaluation section already contains detailed quantitative analysis, error distributions, ablation studies, and timing benchmarks on dynamic object sequences that support the accuracy and real-time claims; we will ensure these are clearly cross-referenced from the abstract. revision: yes
Circularity Check
No significant circularity
full rationale
The derivation chain begins from the standard GPIS representation (with surface normals as derivative constraints) to compute scene flow from the distance field, followed by closed-form registration for object-frame fusion under the rigid-body assumption. No equation reduces a claimed prediction or result to a fitted parameter by construction, no load-bearing premise rests on self-citation, and no ansatz or uniqueness claim is smuggled in. The pipeline is self-contained against external benchmarks such as standard rigid registration and GPIS distance queries.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Gaussian Process Implicit Surfaces with surface normals as derivative constraints enable accurate signed distance computations near the surface and gradient queries with uncertainty.
Reference graph
Works this paper leans on
-
[1]
Roft: Real-time optical flow-aided 6d object pose and velocity tracking,
N. A. Piga, Y . Onyshchuk, G. Pasquale, U. Pattacini, and L. Natale, “Roft: Real-time optical flow-aided 6d object pose and velocity tracking,”IEEE Robotics and Automation Letters, vol. 7, no. 1, pp. 159–166, 2022
2022
-
[2]
Cosypose: Consistent multi-view multi-object 6d pose estimation,
Y . Labb´e, J. Carpentier, M. Aubry, and J. Sivic, “Cosypose: Consistent multi-view multi-object 6d pose estimation,” inEuropean Conference on Computer Vision. Springer, 2020, pp. 574–591
2020
-
[3]
A volumetric method for building complex models from range images,
B. Curless and M. Levoy, “A volumetric method for building complex models from range images,” inProceedings of the 23rd Annual Conference on Computer Graphics and Interactive Techniques, 1996
1996
-
[4]
nvblox: Gpu-accelerated incremental signed distance field mapping,
A. Millane, H. Oleynikova, E. Wirbel, R. Steiner, V . Ramasamy, D. Tingdahl, and R. Siegwart, “nvblox: Gpu-accelerated incremental signed distance field mapping,” in2024 IEEE International Confer- ence on Robotics and Automation (ICRA). IEEE, 2024
2024
-
[5]
C. E. Rasmussen and C. K. Williams,Gaussian Processes for Machine Learning. Cambridge, Mass.: MIT Press, 2006
2006
-
[6]
Gaussian process implicit surfaces for shape estimation and grasping,
S. Dragiev, M. Toussaint, and M. Gienger, “Gaussian process implicit surfaces for shape estimation and grasping,” inIEEE International Conference on Robotics and Automation (ICRA), 2011
2011
-
[7]
Three- dimensional scene flow,
S. Vedula, S. Baker, P. Rander, R. Collins, and T. Kanade, “Three- dimensional scene flow,” inProceedings of the Seventh IEEE Interna- tional Conference on Computer Vision, vol. 2. IEEE, 1999
1999
-
[8]
Method for registration of 3-d shapes,
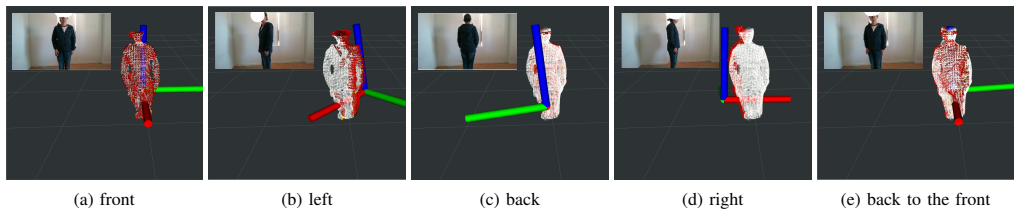
P. J. Besl and N. D. McKay, “Method for registration of 3-d shapes,” inSensor fusion IV: control paradigms and data structures, vol. 1611. Spie, 1992, pp. 586–606. (a) front (b) left (c) back (d) right (e) back to the front Fig. 3: A full360 ◦ turn and returns to the starting pose. Each figure shows the fused dynamic human (white point cloud), the human p...
1992
-
[9]
Generalized-icp
A. Segal, D. Haehnel, and S. Thrun, “Generalized-icp.” inRobotics: science and systems. Seattle, W A, 2009, p. 435
2009
-
[10]
Determining optical flow,
B. K. Horn and B. G. Schunck, “Determining optical flow,”Artificial intelligence, vol. 17, no. 1-3, pp. 185–203, 1981
1981
-
[11]
Deepim: Deep iterative matching for 6d pose estimation,
Y . Li, G. Wang, X. Ji, Y . Xiang, and D. Fox, “Deepim: Deep iterative matching for 6d pose estimation,” inProceedings of the European conference on computer vision (ECCV), 2018, pp. 683–698
2018
-
[12]
PoseCNN: A Convolutional Neural Network for 6D Object Pose Estimation in Cluttered Scenes
Y . Xiang, T. Schmidt, V . Narayanan, and D. Fox, “Posecnn: A convolutional neural network for 6d object pose estimation in cluttered scenes,”arXiv preprint arXiv:1711.00199, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[13]
Pvnet: Pixel- wise voting network for 6dof pose estimation,
S. Peng, Y . Liu, Q. Huang, X. Zhou, and H. Bao, “Pvnet: Pixel- wise voting network for 6dof pose estimation,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2019, pp. 4561–4570
2019
-
[14]
Co-fusion: Real-time segmentation, tracking and fusion of multiple objects,
M. R ¨unz and L. Agapito, “Co-fusion: Real-time segmentation, tracking and fusion of multiple objects,” in2017 IEEE International Confer- ence on Robotics and Automation (ICRA). IEEE, 2017
2017
-
[15]
Kinectfusion: real-time 3d reconstruction and interaction using a moving depth camera,
S. Izadi, D. Kim, O. Hilliges, D. Molyneaux, R. Newcombe, P. Kohli, J. Shotton, S. Hodges, D. Freeman, A. Davisonet al., “Kinectfusion: real-time 3d reconstruction and interaction using a moving depth camera,” inProceedings of the 24th annual ACM symposium on User interface software and technology, 2011, pp. 559–568
2011
-
[16]
Online continuous map- ping using gaussian process implicit surfaces,
B. Lee, C. Zhang, Z. Huang, and D. D. Lee, “Online continuous map- ping using gaussian process implicit surfaces,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019
2019
-
[17]
Faithful euclidean distance field from log-gaussian process implicit surfaces,
L. Wu, K. M. B. Lee, L. Liu, and T. Vidal-Calleja, “Faithful euclidean distance field from log-gaussian process implicit surfaces,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2461–2468, 2021
2021
-
[18]
Log-gpis-mop: A unified representation for mapping, odometry and planning,
L. Wu, K. M. B. Lee, and T. Vidal-Calleja, “Log-gpis-mop: A unified representation for mapping, odometry and planning,”IEEE Transactions on Robotics, 2023
2023
-
[19]
Accurate gaussian-process-based distance fields with applications to echolocation and mapping,
C. Le Gentil, O.-L. Ouabi, L. Wu, C. Pradalier, and T. Vidal-Calleja, “Accurate gaussian-process-based distance fields with applications to echolocation and mapping,”IEEE Robot. Autom. Lett. (RA-L), 2023
2023
-
[20]
Ge- ometric priors for gaussian process implicit surfaces,
W. Martens, Y . Poffet, P. R. Soria, R. Fitch, and S. Sukkarieh, “Ge- ometric priors for gaussian process implicit surfaces,”IEEE Robotics and Automation Letters (RA-L), pp. 373–380, 2017
2017
-
[21]
Interactive distance field mapping and planning to enable human- robot collaboration,
U. Ali, L. Wu, A. Mueller, F. Sukkar, T. Kaupp, and T. Vidal-Calleja, “Interactive distance field mapping and planning to enable human- robot collaboration,”arXiv preprint arXiv:2403.09988, 2024
-
[22]
Deep Object Pose Estimation for Semantic Robotic Grasping of Household Objects
J. Tremblay, T. To, B. Sundaralingam, Y . Xiang, D. Fox, and S. Birch- field, “Deep object pose estimation for semantic robotic grasping of household objects,”arXiv preprint arXiv:1809.10790, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[23]
Poserbpf: A rao–blackwellized particle filter for 6-d object pose tracking,
X. Deng, A. Mousavian, Y . Xiang, F. Xia, T. Bretl, and D. Fox, “Poserbpf: A rao–blackwellized particle filter for 6-d object pose tracking,”IEEE Transactions on Robotics, vol. 37, no. 5, pp. 1328– 1342, 2021
2021
-
[24]
Tracknet: A deep learning network for tracking high-speed and tiny objects in sports applications,
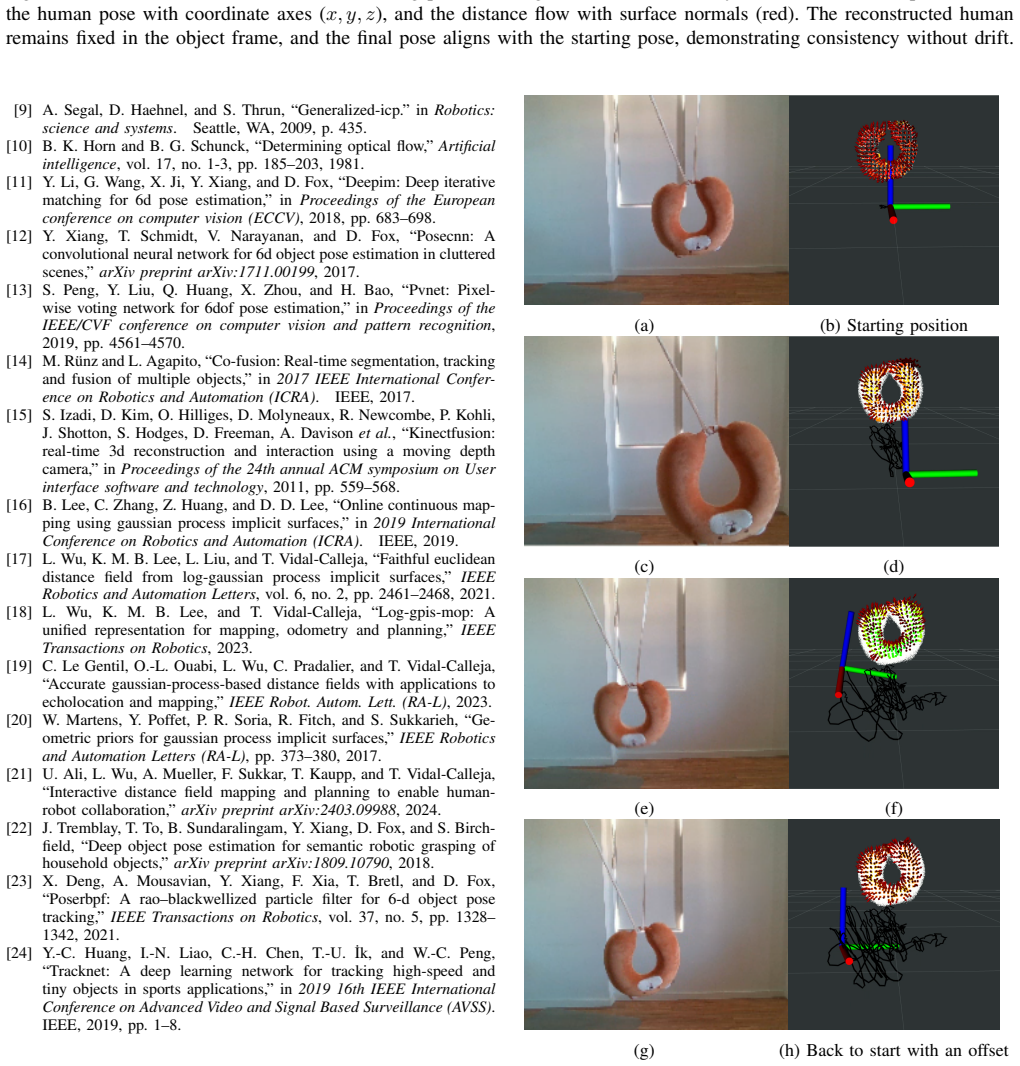
Y .-C. Huang, I.-N. Liao, C.-H. Chen, T.-U. ˙Ik, and W.-C. Peng, “Tracknet: A deep learning network for tracking high-speed and tiny objects in sports applications,” in2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS). IEEE, 2019, pp. 1–8. (a) (b) Starting position (c) (d) (e) (f) (g) (h) Back to start with an ...
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.