From Well-Posed Inversion to Learning Design: Physics- Informed Neural Estimation for Autonomic Regulation
Pith reviewed 2026-06-28 08:34 UTC · model grok-4.3
The pith
Embedding control-theoretic left-invertibility conditions into physics-informed neural training improves reliability of unknown-input and state estimation beyond forward consistency alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that deriving left-invertibility conditions by differential-algebraic elimination and embedding the resulting constraints into the neural training objective, together with an a priori Lipschitz bound on the inverse map, yields a physics-informed input-state estimator whose inverse inference is more reliable than one trained under forward consistency alone; this is shown on simulated data and two real cardiovascular recording datasets for the autonomic regulation model.
What carries the argument
Left-invertibility conditions obtained by differential-algebraic elimination, embedded as explicit constraints in the neural training objective alongside data fidelity and dynamical consistency terms.
If this is right
- The estimator satisfies the same structural solvability requirements used in classical robust estimation theory.
- A conservative Lipschitz bound on the inverse mapping can be computed a priori to guide hyper-parameter selection in the cost functional.
- The method produces joint unknown-input and state estimates that remain consistent with the system dynamics under partial measurements.
- Performance gains appear on both simulated trajectories and real recordings from autonomic cardiac regulation.
Where Pith is reading between the lines
- Similar embedding of structural constraints could be applied to other inverse problems in nonlinear control where Hadamard well-posedness is required.
- The approach suggests that generic regularization in physics-informed learning can be replaced or augmented by explicit solvability conditions derived from the system structure.
- If the differential-algebraic elimination step scales to higher-dimensional systems, the framework could extend to multi-input multi-output regulation tasks beyond cardiac models.
Load-bearing premise
The left-invertibility conditions derived by differential-algebraic elimination can be added to the neural training objective without creating inconsistencies that stop the network from learning useful input-output mappings from the available data.
What would settle it
Training the same neural architecture on the same cardiovascular datasets once with the embedded left-invertibility constraints and once without them, then comparing the resulting estimation errors and stability to output perturbations; if the version without the constraints performs equally well or better, the central claim is falsified.
Figures
read the original abstract
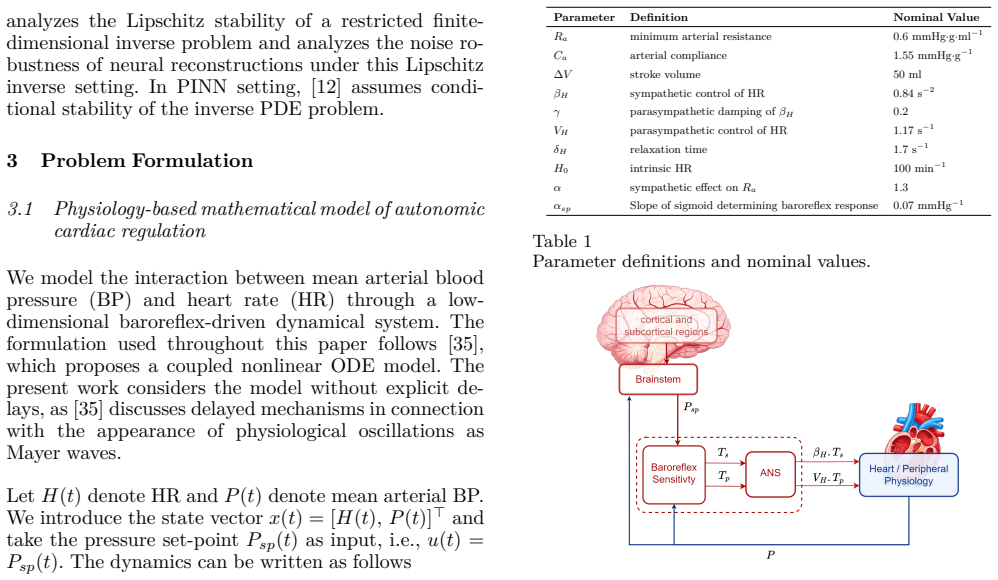
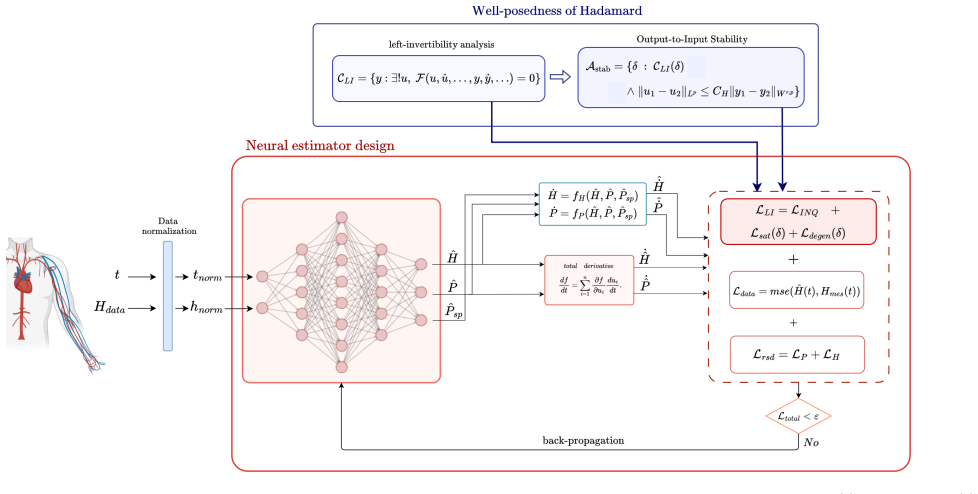
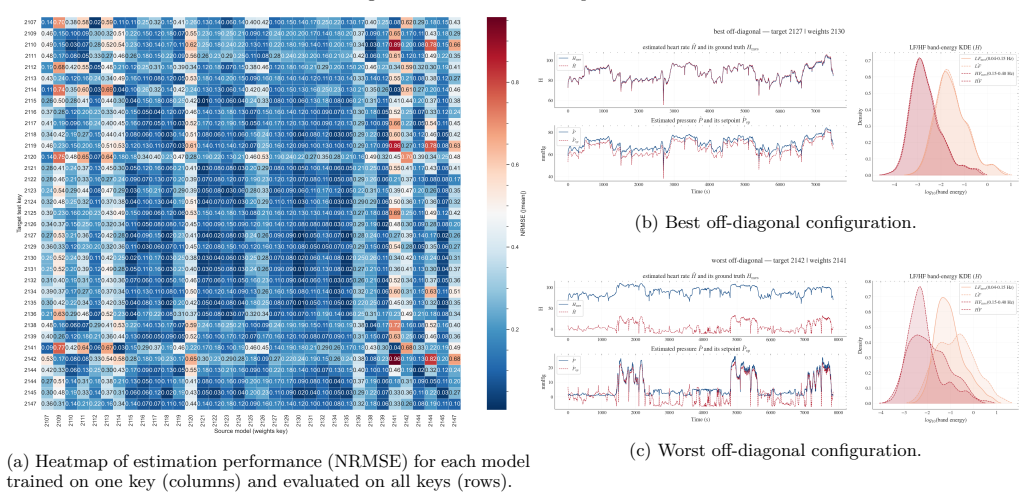
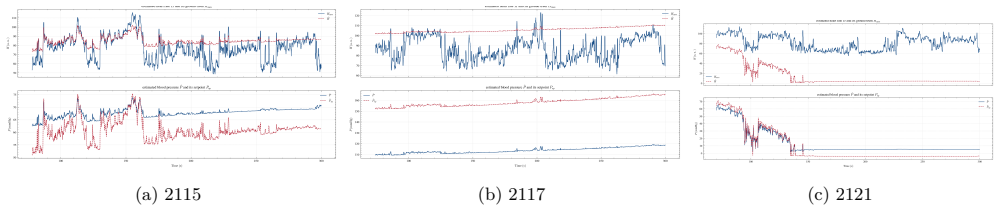
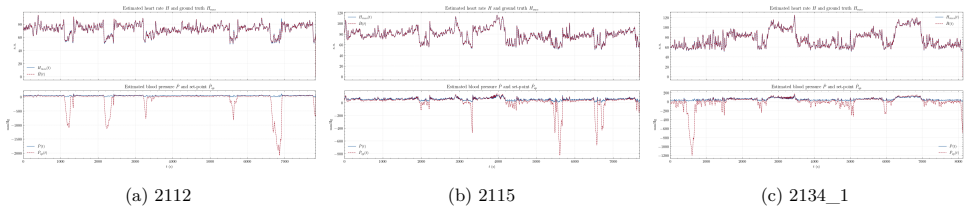
Learning-based and physics-informed methods are increasingly used for inverse estimation in controlled nonlinear dynamical systems. However, in many such approaches, the theoretic requirements that make unknown-input reconstruction meaningful, namely well-posedness in the sense of Hadamard, are often disregarded or weakly addressed through generic regularization terms with no explicit guarantees. In this work, we adopt a complementary viewpoint in which these control-theoretic and structural conditions inform the estimator design and constrain its training. We thus develop a physics-informed input-state neural estimator for joint unknown-input and state estimation in nonlinear controlled systems with partial measurements. In the present work, this general framework is instantiated on a model of autonomic cardiac regulation, provides a concrete study case. The estimator is formulated as an inverse neural map conditioned on time and measured outputs, and is trained under data fidelity and dynamical consistency constraints. To ensure it complies with the same structural requirements imposed in robust estimation, we derive left-invertibility conditions by differential-algebraic elimination and embed the resulting constraints directly into the training objective. We further analyze a priori the stability of the inverse mapping to output perturbations and derive a conservative Lipschitz bound that guides the tuning of cost functional hyper-parameters. The framework is evaluated on simulated data, where ground truth data is available, and on two distinct datasets of real cardiovascular recordings. The results show that incorporating control-theoretic solvability constraints into physics-informed learning improves the reliability of inverse inference beyond forward consistency alone.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a physics-informed neural estimator for joint unknown-input and state estimation in nonlinear controlled systems with partial measurements, instantiated on a model of autonomic cardiac regulation. It derives left-invertibility conditions via differential-algebraic elimination, embeds the resulting constraints directly into the training objective alongside data fidelity and dynamical consistency terms, derives a conservative Lipschitz bound on the inverse map to guide hyper-parameter tuning, and evaluates the approach on simulated data and two real cardiovascular datasets, claiming that the control-theoretic constraints improve reliability of inverse inference beyond forward consistency alone.
Significance. If the embedding of left-invertibility conditions proves effective without introducing optimization inconsistencies, the work offers a principled bridge between control-theoretic well-posedness requirements and physics-informed learning for inverse problems. The explicit use of differential-algebraic elimination to obtain structural constraints and the a priori Lipschitz analysis constitute concrete strengths that could generalize to other biomedical or engineering inverse estimation tasks where Hadamard well-posedness matters.
major comments (3)
- [Abstract, §3] Abstract and §3 (method): The claim that left-invertibility conditions obtained by differential-algebraic elimination are 'embedded directly into the training objective' requires explicit detail on how higher-order derivatives or implicit algebraic relations are rendered differentiable, whether they remain feasible under the assumed partial measurements, and how their weighting interacts with the dynamical consistency and Lipschitz-derived terms; without this, the weakest assumption (no inconsistencies blocking useful learning) cannot be verified.
- [Evaluation] Evaluation section: The abstract asserts that 'incorporating control-theoretic solvability constraints improves the reliability of inverse inference beyond forward consistency alone,' yet the provided summary contains no quantitative metrics, error bars, ablation results (with vs. without invertibility constraints), or verification that the embedded constraints actually enforce the claimed invertibility; this leaves the central empirical claim unsupported at the level of evidence.
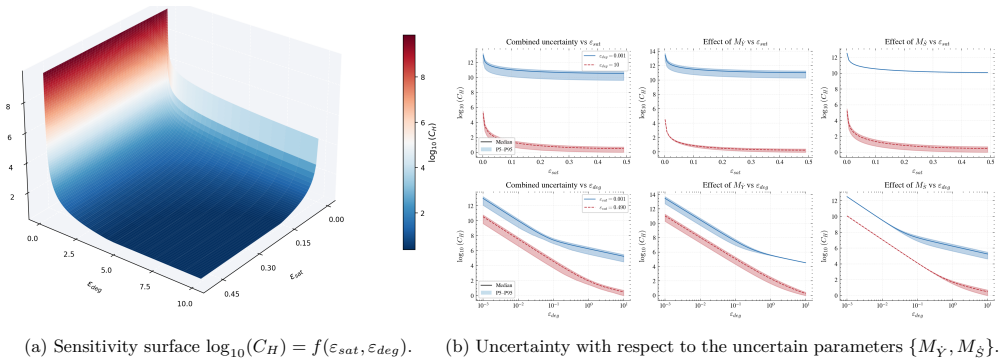
- [§4] §4 (stability analysis): The conservative Lipschitz bound is presented as guiding cost-functional hyper-parameter tuning, but it is unclear whether this bound was validated against observed output perturbations on the real datasets or remains purely theoretical; if the former is absent, the practical utility of the bound for the reported experiments is not demonstrated.
minor comments (2)
- Notation for the inverse neural map and the eliminated algebraic constraints should be introduced with explicit definitions before their use in the loss function to improve readability.
- The manuscript should clarify whether the two real cardiovascular datasets are publicly available or provide sufficient description for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which identify opportunities to strengthen the clarity and empirical support of the manuscript. We address each major comment below and will revise accordingly.
read point-by-point responses
-
Referee: [Abstract, §3] Abstract and §3 (method): The claim that left-invertibility conditions obtained by differential-algebraic elimination are 'embedded directly into the training objective' requires explicit detail on how higher-order derivatives or implicit algebraic relations are rendered differentiable, whether they remain feasible under the assumed partial measurements, and how their weighting interacts with the dynamical consistency and Lipschitz-derived terms; without this, the weakest assumption (no inconsistencies blocking useful learning) cannot be verified.
Authors: We agree that additional implementation details are needed. In the revised manuscript we will expand §3 with a step-by-step description of how the differential-algebraic constraints are discretized, how higher-order derivatives are obtained via automatic differentiation, confirmation of feasibility under the partial-measurement left-invertibility conditions, and the specific weighting coefficients together with their relation to the other loss terms. revision: yes
-
Referee: [Evaluation] Evaluation section: The abstract asserts that 'incorporating control-theoretic solvability constraints improves the reliability of inverse inference beyond forward consistency alone,' yet the provided summary contains no quantitative metrics, error bars, ablation results (with vs. without invertibility constraints), or verification that the embedded constraints actually enforce the claimed invertibility; this leaves the central empirical claim unsupported at the level of evidence.
Authors: We acknowledge the need for explicit quantitative support. The revised evaluation section will include ablation studies comparing the full estimator against versions without the invertibility constraints, reporting estimation errors with standard deviations over repeated trials, and adding diagnostics (e.g., residual plots) that verify satisfaction of the embedded constraints. revision: yes
-
Referee: [§4] §4 (stability analysis): The conservative Lipschitz bound is presented as guiding cost-functional hyper-parameter tuning, but it is unclear whether this bound was validated against observed output perturbations on the real datasets or remains purely theoretical; if the former is absent, the practical utility of the bound for the reported experiments is not demonstrated.
Authors: The bound is derived a priori. To demonstrate practical utility we will add, in the revision, a supplementary comparison of the theoretical bound against observed output sensitivities computed on the real cardiovascular datasets, thereby linking the a priori analysis to the reported experiments. revision: yes
Circularity Check
No significant circularity; derivation draws on independent control-theoretic analysis
full rationale
The paper derives left-invertibility conditions via differential-algebraic elimination and a Lipschitz bound for stability, then embeds the former as training constraints while evaluating on simulated and real data. These steps are presented as external control-theoretic inputs that inform the estimator design rather than being redefined by the neural outputs or fitted parameters. No self-definitional loops, fitted inputs renamed as predictions, or load-bearing self-citations appear in the provided abstract or summary. The central claim of improved reliability is supported by explicit data evaluation rather than reducing to the inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- cost functional hyper-parameters
axioms (1)
- domain assumption The underlying dynamical system admits left-invertibility conditions obtainable by differential-algebraic elimination
Reference graph
Works this paper leans on
-
[1]
Amjad.Deep Learning for Inverse Problems: Performance Characterizations, Learning Algorithms, and Applications
J. Amjad.Deep Learning for Inverse Problems: Performance Characterizations, Learning Algorithms, and Applications. Ph.d. thesis, University College London (UCL), 2022
2022
-
[2]
Ardizzone, J
L. Ardizzone, J. Kruse, S. Wirkert, D. Rahner, E. W. Pellegrini, R. S. Klessen, L. Maier-Hein, C. Rother, and U. Köthe. Analyzing inverse problems with invertible neural networks.arXiv preprint, 2018
2018
-
[3]
Ataee, G
P. Ataee, G. A. Dumont, and W. T. Boyce. Baroreflex modeling in the genesis of stress reactivity using sigmoidal characteristic. InProceedings of the 2010 American Control Conference, pages 3566–3571. IEEE, 2010
2010
-
[4]
Physics- informed learning for identification and state reconstruction of traffic density
M.Barreau,M.Aguiar,J.Liu,andK.H.Johansson. Physics- informed learning for identification and state reconstruction of traffic density. In2021 60th IEEE Conference on Decision and Control (CDC), pages 2653–2658. IEEE, 2021
2021
-
[5]
D. Bernal. Input reconstruction in systems with unknown nonlinearities.Mechanical Systems and Signal Processing, 190:110140, 2023
2023
-
[6]
Buskulic.Neural Network Based Methods for Inverse Problems: Algorithms and Guarantees
N. Buskulic.Neural Network Based Methods for Inverse Problems: Algorithms and Guarantees. Ph.d. thesis, Université de Caen Normandie, 2024
2024
-
[7]
Caglio, A
L. Caglio, A. Sadeqi, H. Stang, and E. Katsanos. Joint input- state estimation of structures subjected to complex loads via augmented kalman filter with physics informed latent force models.Mechanical Systems and Signal Processing, 223:111852, 2025
2025
-
[8]
Chakrabarty, M
A. Chakrabarty, M. J. Corless, G. T. Buzzard, S. H. Żak, and A. E. Rundell. State and unknown input observers for nonlinear systems with bounded exogenous inputs.IEEE Transactions on Automatic Control, 62(10):4936–4951, 2017
2017
-
[9]
Physics-informeddeep-learningfor elasticity: forward, inverse, and mixed problems.Advanced Science, 10(18):2300439, 2023
C.-T.ChenandG.X.Gu. Physics-informeddeep-learningfor elasticity: forward, inverse, and mixed problems.Advanced Science, 10(18):2300439, 2023
2023
-
[10]
H. Chen, H. Luo, B. Huang, B. Jiang, and O. Kaynak. Data- driven designs of observers and controllers via solving model matching problems.Automatica, 156:111196, 2023
2023
-
[11]
O.-T. Chis, J. R. Banga, and E. Balsa-Canto. Structural identifiability of systems biology models: a critical comparison of methods.PloS one, 6(11):e27755, 2011
2011
-
[12]
De Ryck and S
T. De Ryck and S. Mishra. Numerical analysis of physics- informed neural networks and related models in physics- informed machine learning.Acta Numerica, 2024
2024
-
[13]
Denis-Vidal and G
L. Denis-Vidal and G. Joly-Blanchard. Equivalence and identifiability analysis of uncontrolled nonlinear dynamical systems.Automatica, 40(2):287–292, 2004
2004
-
[14]
L. Dinh, D. Krueger, and Y. Bengio. Nice: Non-linear independent components estimation.arXiv preprint, 2014
2014
-
[15]
L. Dinh, J. Sohl-Dickstein, and S. Bengio. Density estimation using real NVP. InInternational Conference on Learning Representations (ICLR), 2017. arXiv:1605.08803
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[16]
Engelhardt, H
B. Engelhardt, H. Fröhlich, and M. Kschischo. Learning (from) the errors of a systems biology model.Scientific Reports, 6:20772, 2016
2016
-
[17]
H. W. Engl. Inverse problems and their regularization. In Computational Mathematics Driven by Industrial Problems: Lectures given at the 1st Session of the Centro Internazionale Matematico Estivo (CIME) held in Martina Franca, Italy, June 21–27, 1999, pages 127–150. Springer, 2007
1999
-
[18]
Data-drivenobserver design for nonlinear systems using automatic differentiation
J.Fiedler,D.Gerbet,andK.Röbenack. Data-drivenobserver design for nonlinear systems using automatic differentiation. PAMM, 25(1):e202400115, 2025
2025
-
[19]
Fonod, D
R. Fonod, D. Henry, C. Charbonnel, and E. Bomschlegl. A class of nonlinear unknown input observer for fault diagnosis: Application to fault tolerant control of an autonomous spacecraft. In2014 UKACC International Conference on Control (CONTROL). IEEE, 2014
2014
-
[20]
Haywood-Alexander, G
M. Haywood-Alexander, G. Arcieri, A. Kamariotis, and E. Chatzi. Response estimation and system identification of dynamical systems via physics-informed neural networks. Advanced Modeling and Simulation in Engineering Sciences, 12(1):8, 2025
2025
-
[21]
R. M. Hirschorn. Invertibility of nonlinear control systems. SIAM Journal on Control and Optimization, 1979
1979
-
[22]
É. Hubert. Factorization-free decomposition algorithms in differential algebra.Journal of symbolic computation, 29(4- 5):641–662, 2000
2000
-
[23]
X.-B. Jin, R. J. Robert Jeremiah, T.-L. Su, Y.-T. Bai, and J.-L. Kong. The new trend of state estimation: From model- driven to hybrid-driven methods.Sensors, 21(6):2085, 2021. 15
2085
-
[24]
S. I. Kabanikhin et al. Definitions and examples of inverse and ill-posed problems.J. Inverse Ill-Posed Probl, 2008
2008
-
[25]
Kharazmi, M
E. Kharazmi, M. Cai, X. Zheng, Z. Zhang, G. Lin, and G. E. Karniadakis. Identifiability and predictability of integer- and fractional-order epidemiological models using physics- informed neural networks.Nature Computational Science, 1(11):744–753, 2021
2021
-
[26]
Kim and J
D. Kim and J. Lee. A review of physics informed neural networks for multiscale analysis and inverse problems. Multiscale Science and Engineering, 6(1):1–11, 2024
2024
-
[27]
D. P. Kingma and P. Dhariwal. Glow: Generative flow with invertible 1x1 convolutions. InAdvances in Neural Information Processing Systems (NeurIPS), 2018
2018
-
[28]
Krishnapriyan, A
A. Krishnapriyan, A. Gholami, S. Zhe, R. Kirby, and M. W. Mahoney. Characterizing possible failure modes in physics- informed neural networks.Advances in neural information processing systems, 34:26548–26560, 2021
2021
-
[29]
Kullberg, I
A. Kullberg, I. Skog, and G. Hendeby. Online joint state inference and learning of partially unknown state–space models.IEEE Transactions on Signal Processing, 2021
2021
-
[30]
X. Li, T. Zhu, and L. Zhang. State estimation and simultaneous unknown input and measurement noise reconstruction for lipschitz nonlinear systems via an adaptive h∞observer.International Journal of Control, Automation and Systems, 2016
2016
-
[31]
D.-Y. Liu, O. Gibaru, and W. Perruquetti. Error analysis of jacobi derivative estimators for noisy signals.Numerical Algorithms, 58(1):53–83, 2011
2011
-
[32]
A. I. Malikov. Synthesis of state unknown inputs observers for nonlinear lipschitz systems with uncertain disturbances. Automation and Remote Control, 79(3):406–424, 2018
2018
-
[33]
Minadakis
V. Minadakis. Application of physics informed neural networks in the development of physiologically based knetic models.Application of physics informed neural networks in the development of physiologically based knetic models, 2024
2024
-
[34]
Nayek, S
R. Nayek, S. Chakraborty, and S. Narasimhan. A gaussian process latent force model for joint input-state estimation in linear structural systems.Mechanical Systems and Signal Processing, 128:497–530, 2019
2019
-
[35]
J. T. Ottesen. Modelling of the baroreflex-feedback mechanism with time-delay.Journal of mathematical biology, 36(1):41–63, 1997
1997
-
[36]
Parent, I
M. Parent, I. Albuquerque, A. Tiwari, R. Cassani, J.-F. Gagnon, D. Lafond, S. Tremblay, and T. H. Falk. Pass: a multimodaldatabaseofphysicalactivityandstressformobile passive body/brain-computer interface research.Frontiers in Neuroscience, 14:542934, 2020
2020
-
[37]
A. F. L. Pineda and P. C. Petersen. Deep neural networks can stably solve high-dimensional, noisy, non-linear inverse problems.arXiv preprint, 2022
2022
-
[38]
Raissi, P
M. Raissi, P. Perdikaris, and G. E. Karniadakis. Physics- informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational physics, 378:686–707, 2019
2019
-
[39]
S. N. Sadoun, G. A. d’Inverno, A. Boutin, F. Cottin, and T.-M. Laleg-Kirati. Physics-informed neural estimation of stateandunknowninputinautonomiccardiacdynamicswith left-invertibility constraints.IEEE Reviews in Biomedical Engineering, 2026
2026
-
[40]
Sharma and M
R. Sharma and M. Aldeen. Fault and disturbance reconstruction in non-linear systems using a network of interconnected sliding mode observers.IET Control Theory & Applications, 5(6):751–763, 2011
2011
-
[41]
Tsiantis, E
N. Tsiantis, E. Balsa-Canto, and J. R. Banga. Optimality and identification of dynamic models in systems biology: an inverse optimal control framework.Bioinformatics, 34(14):2433–2440, 2018
2018
-
[42]
K. C. Veluvolu and Y. C. Soh. Discrete-time sliding-mode state and unknown input estimations for nonlinear systems. IEEE Transactions on Industrial Electronics, 2009
2009
-
[43]
Vettori, E
S. Vettori, E. Di Lorenzo, B. Peeters, and E. Chatzi. Assessmentofalternativecovariancefunctionsforjointinput- state estimation via gaussian process latent force models in structural dynamics.Mechanical Systems and Signal Processing, 213:111303, 2024
2024
-
[44]
Wanika, J
L. Wanika, J. Egan, N. Swaminathan, C. Duran-Villalobos, J. Branke, S. Goldrick, and M. Chappell. Structural and practical identifiability analysis in bioengineering: a beginner’s guide.Journal of Biological Engineering, 2024
2024
-
[45]
J. Yang, F. Zhu, and X. Sun. State estimation and simultaneous unknown input and measurement noise reconstruction based on associated observers.International Journal of Adaptive Control and Signal Processing, 2013
2013
-
[46]
Zhang, M
E. Zhang, M. Dao, G. E. Karniadakis, and S. Suresh. Analyses of internal structures and defects in materials using physics-informed neural networks.Science advances, 8(7):eabk0644, 2022. 16
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.