Let the Dynamics Flow: Stable Flow Matching Dynamical Systems
Pith reviewed 2026-06-28 09:27 UTC · model grok-4.3
The pith
SFMDS parametrizes dynamical systems via flow matching while constraining them to Lyapunov-stable solutions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SFMDS parametrizes dynamical systems via flow matching while simultaneously constraining the model to a family of stable solutions, using either a soft penalty based on a Lyapunov function or a hard structural constraint in the architecture, with both formulations extended to Lie groups.
What carries the argument
The SFMDS framework that embeds flow matching into dynamical systems and enforces Lyapunov stability through penalty terms or architectural modifications.
If this is right
- Stable multimodal dynamical systems become learnable in high-dimensional state spaces.
- Both soft and hard stability constraints are compatible with flow matching for robot tasks.
- Extensions to Lie groups allow stable policies on rotations and other manifold-valued states.
- Real-robot experiments confirm safe motion generation on hardware such as humanoids.
Where Pith is reading between the lines
- The same constraint ideas could be tested on other generative models such as diffusion policies.
- Stability as an inductive bias may improve generalization across related control problems.
- Further tests on different robot morphologies would show how far the constraints scale.
- Hybrid soft-plus-hard variants might offer tunable trade-offs between flexibility and guarantees.
Load-bearing premise
The soft penalty or hard architectural constraints can enforce formal Lyapunov stability on the learned flow while retaining the scalability and multimodality of unconstrained flow matching.
What would settle it
Generate trajectories from a trained SFMDS model and check whether they all converge to the designated equilibrium point under the associated Lyapunov function, or whether any diverge.
Figures

read the original abstract
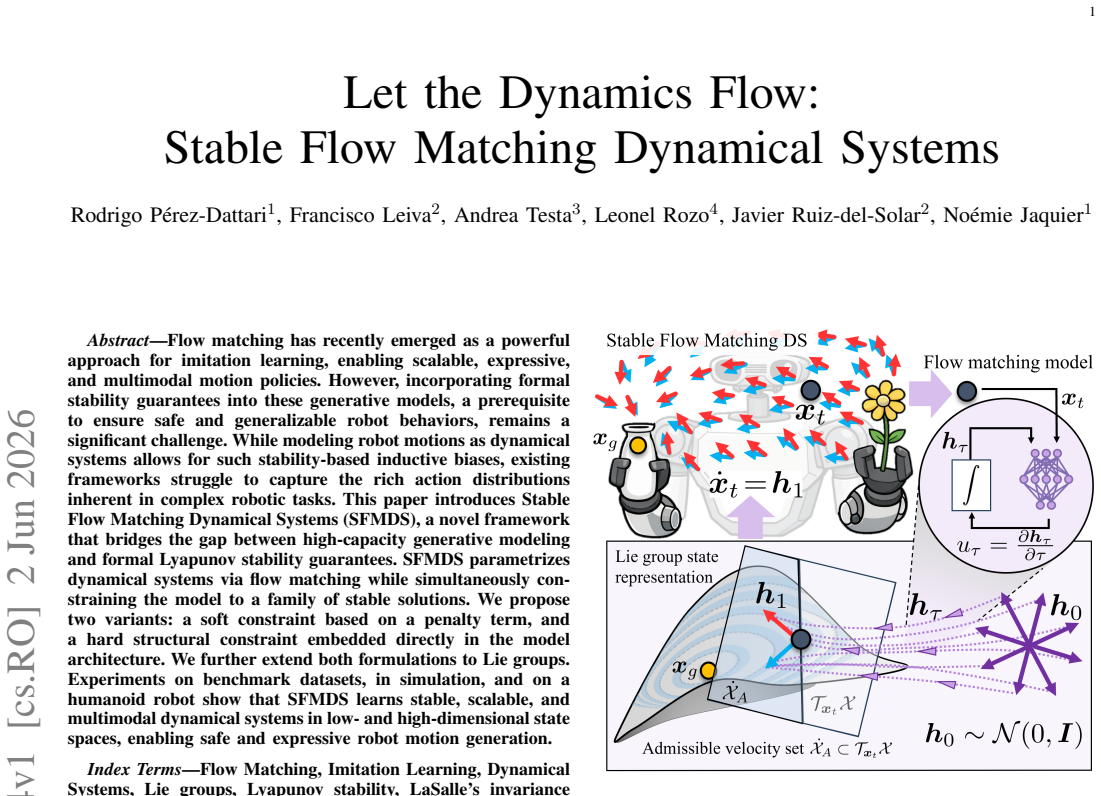
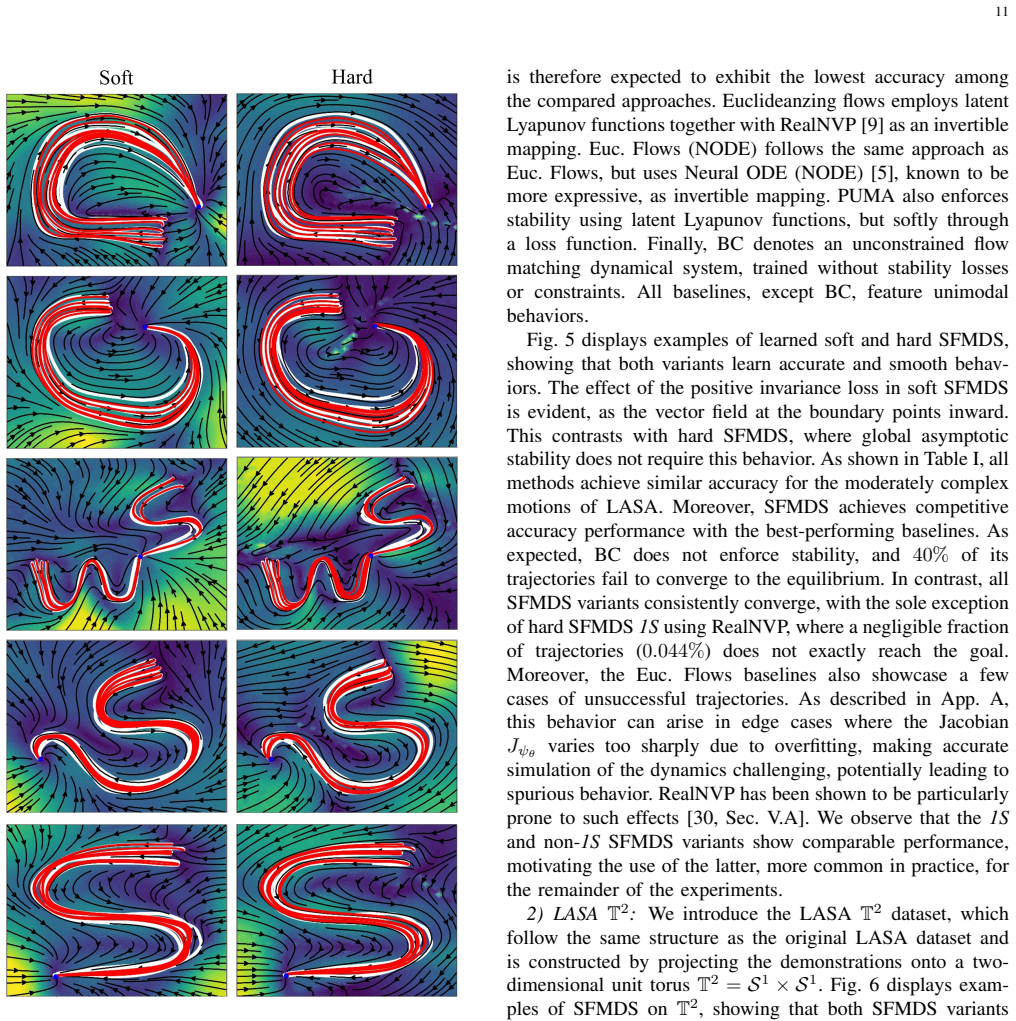
Flow matching has recently emerged as a powerful approach for imitation learning, enabling scalable, expressive, and multimodal motion policies. However, incorporating formal stability guarantees into these generative models, a prerequisite to ensure safe and generalizable robot behaviors, remains a significant challenge. While modeling robot motions as dynamical systems allows for such stability-based inductive biases, existing frameworks struggle to capture the rich action distributions inherent in complex robotic tasks. This paper introduces Stable Flow Matching Dynamical Systems (SFMDS), a novel framework that bridges the gap between high-capacity generative modeling and formal Lyapunov stability guarantees. SFMDS parametrizes dynamical systems via flow matching while simultaneously constraining the model to a family of stable solutions. We propose two variants: a soft constraint based on a penalty term, and a hard structural constraint embedded directly in the model architecture. We further extend both formulations to Lie groups. Experiments on benchmark datasets, in simulation, and on a humanoid robot show that SFMDS learns stable, scalable, and multimodal dynamical systems in low- and high-dimensional state spaces, enabling safe and expressive robot motion generation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Stable Flow Matching Dynamical Systems (SFMDS) that parametrizes dynamical systems using flow matching while constraining the model to stable solutions via soft penalty or hard architectural constraint, with extensions to Lie groups. It reports experiments on benchmark datasets, simulation, and a humanoid robot demonstrating stable, scalable, and multimodal dynamical systems for robot motion generation.
Significance. If the stability constraints are shown to be formal and the expressivity preserved, this bridges high-capacity generative models with safety guarantees, which is significant for deploying imitation learning in robotics.
major comments (2)
- [Hard structural constraint] Hard structural constraint: The architectural embedding of the stability constraint may narrow the function class relative to unconstrained flow matching; the manuscript must demonstrate (via mode-coverage metrics or ablation on high-dimensional robotic tasks) that multimodality is retained rather than implicitly sacrificed.
- [Stability guarantees] Stability guarantees: The claim of formal Lyapunov stability requires an explicit derivation showing that the soft penalty or hard constraint enforces the necessary conditions on the vector field (e.g., negative definiteness of the Lyapunov derivative); without this, it is unclear whether stability is guaranteed or merely encouraged heuristically.
minor comments (1)
- Label all experimental figures and tables to distinguish soft vs. hard variants and report quantitative stability margins (e.g., minimum eigenvalue of the Jacobian or Lyapunov function values) alongside success rates.
Simulated Author's Rebuttal
We thank the referee for their thoughtful review and constructive comments on our manuscript. We address each major comment below.
read point-by-point responses
-
Referee: [Hard structural constraint] Hard structural constraint: The architectural embedding of the stability constraint may narrow the function class relative to unconstrained flow matching; the manuscript must demonstrate (via mode-coverage metrics or ablation on high-dimensional robotic tasks) that multimodality is retained rather than implicitly sacrificed.
Authors: We thank the referee for this observation. Our experiments already include high-dimensional robotic tasks on a humanoid robot where SFMDS produces diverse multimodal behaviors, as evidenced by the variety of generated trajectories. To directly address the concern about potential narrowing of the function class, we will add explicit mode-coverage metrics and ablations isolating the hard constraint in the revised manuscript. revision: yes
-
Referee: [Stability guarantees] Stability guarantees: The claim of formal Lyapunov stability requires an explicit derivation showing that the soft penalty or hard constraint enforces the necessary conditions on the vector field (e.g., negative definiteness of the Lyapunov derivative); without this, it is unclear whether stability is guaranteed or merely encouraged heuristically.
Authors: We agree that an explicit derivation is needed to substantiate the formal guarantees. We will expand the manuscript with a dedicated derivation section proving that both the soft penalty and hard architectural constraints enforce negative definiteness of the Lyapunov derivative (and the corresponding conditions on Lie groups), thereby establishing asymptotic stability. revision: yes
Circularity Check
No circularity; derivation presented as independent combination of flow matching and stability constraints
full rationale
The provided abstract and description introduce SFMDS as a novel parametrization of dynamical systems via flow matching with added soft or hard stability constraints (including Lie-group extensions). No equations, fitted parameters renamed as predictions, or self-citation chains are exhibited that would reduce the central claim to its inputs by construction. The stability enforcement is described as an additive constraint on an otherwise standard flow-matching model, without evidence of self-definitional loops or load-bearing self-citations. The derivation is therefore self-contained on the available text.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Parametric correspondence and cham- fer matching: Two new techniques for image matching
Harry G Barrow, Jay M Tenenbaum, Robert C Bolles, and Helen C Wolf. Parametric correspondence and cham- fer matching: Two new techniques for image matching. Technical report, 1977
1977
-
[2]
Learning for adaptive and reactive robot control: a dynamical systems approach
Aude Billard, Sina Mirrazavi, and Nadia Figueroa. Learning for adaptive and reactive robot control: a dynamical systems approach. Mit Press, 2022
2022
-
[3]
Cambridge university press, 2004
Stephen Boyd and Lieven Vandenberghe.Convex opti- mization. Cambridge university press, 2004
2004
-
[4]
Riemannian flow matching policy for robot motion learning
Max Braun, No ´emie Jaquier, Leonel Rozo, and Tamim Asfour. Riemannian flow matching policy for robot motion learning. InIEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pages 5144–5151, 2024
2024
-
[5]
Neural ordinary differential equations.Advances in neural information processing systems, 31, 2018
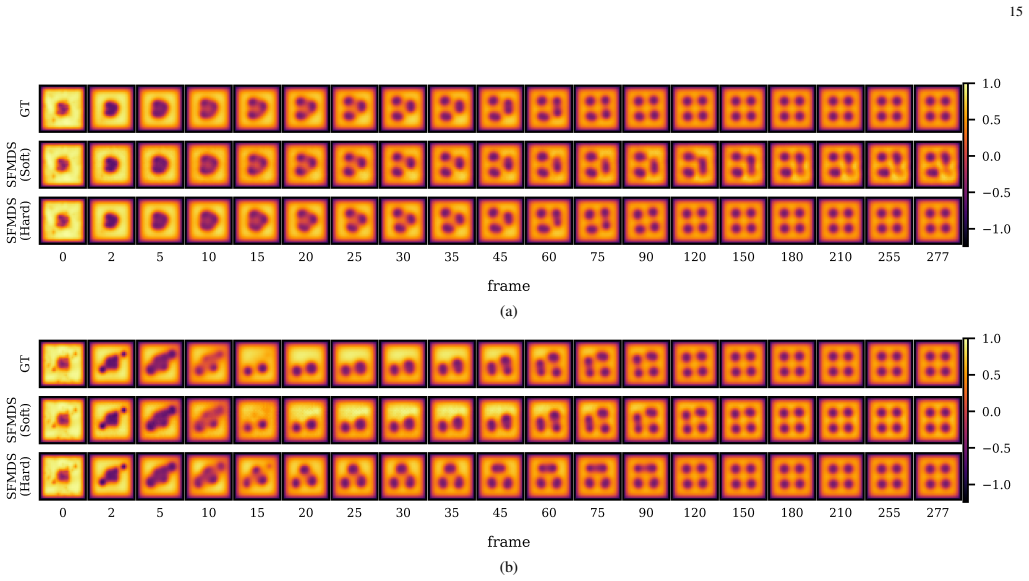
Ricky TQ Chen, Yulia Rubanova, Jesse Bettencourt, and David K Duvenaud. Neural ordinary differential equations.Advances in neural information processing systems, 31, 2018. 15 (a) (b) Fig. 10. Ground-truth (GT) and generated trajectories via Soft and Hard SFMDS associated with two different demonstrations ((a) and (b), respectively)
2018
-
[6]
Safe and stable control via Lyapunov-guided diffusion models
Xiaoyuan Cheng, Xiaohang Tang, and Yiming Yang. Safe and stable control via Lyapunov-guided diffusion models. InNeural Information Processing Systems (NeurIPS), 2025
2025
-
[7]
Learn- ing robotic manipulation policies from point clouds with conditional flow matching
Eugenio Chisari, Nick Heppert, Max Argus, Tim Welschehold, Thomas Brox, and Abhinav Valada. Learn- ing robotic manipulation policies from point clouds with conditional flow matching. InConference on Robot Learning (CoRL), 2024
2024
-
[8]
Fast and robust visuomotor riemannian flow matching policy.IEEE Transactions on Robotics, 41: 5327–5343, 2025
Haoran Ding, No ´emie Jaquier, Jan Peters, and Leonel Rozo. Fast and robust visuomotor riemannian flow matching policy.IEEE Transactions on Robotics, 41: 5327–5343, 2025
2025
-
[9]
Density estimation using real nvp
Laurent Dinh, Jascha Sohl-Dickstein, and Samy Bengio. Density estimation using real nvp. InInternational Conference on Learning Representations, 2017
2017
-
[10]
Fast and stable learning of dynamical systems based on extreme learning machine.IEEE Transactions on Systems, Man, and Cybernetics: Systems, 49(6):1175–1185, 2017
Jianghua Duan, Yongsheng Ou, Jianbing Hu, Zhiyang Wang, Shaokun Jin, and Chao Xu. Fast and stable learning of dynamical systems based on extreme learning machine.IEEE Transactions on Systems, Man, and Cybernetics: Systems, 49(6):1175–1185, 2017
2017
-
[11]
Computing discrete Fr´echet distance
Thomas Eiter and Heikki Mannila. Computing discrete Fr´echet distance. Technical Report CD-TR 94/64, Tech- nische Universitat Wien, 1994
1994
-
[12]
Action- Flow: Equivariant, accurate, and efficient policies with spatially symmetric flow matching
Niklas Funk, Julen Urain, Joao Carvalho, Vignesh Prasad, Georgia Chalvatzaki, and Jan Peters. Action- Flow: Equivariant, accurate, and efficient policies with spatially symmetric flow matching. 2024
2024
-
[13]
Mohammad Khansari-Zadeh and Aude Billard
S. Mohammad Khansari-Zadeh and Aude Billard. Learn- ing stable nonlinear dynamical systems with gaussian mixture models.IEEE Transactions on Robotics, 27(5): 943–957, 2011
2011
-
[14]
Mohammad Khansari-Zadeh and Aude Billard
S. Mohammad Khansari-Zadeh and Aude Billard. Learn- ing control lyapunov function to ensure stability of dy- namical system-based robot reaching motions.Robotics and Autonomous Systems, 62(6):752–765, 2014
2014
-
[15]
Glow: Generative flow with invertible 1x1 convolutions.Advances in neural information processing systems, 31, 2018
Durk P Kingma and Prafulla Dhariwal. Glow: Generative flow with invertible 1x1 convolutions.Advances in neural information processing systems, 31, 2018
2018
-
[16]
Normalizing flows: An introduction and review of current methods.IEEE Transactions on Pattern Analysis and Machine Intelligence, 43(11):3964–3979, 2020
Ivan Kobyzev, Simon JD Prince, and Marcus A Brubaker. Normalizing flows: An introduction and review of current methods.IEEE Transactions on Pattern Analysis and Machine Intelligence, 43(11):3964–3979, 2020
2020
-
[17]
Learning stable deep dynamics models.Advances in neural information processing systems, 32, 2019
J Zico Kolter and Gaurav Manek. Learning stable deep dynamics models.Advances in neural information processing systems, 32, 2019
2019
-
[18]
An invariance principle in the theory of stability
Joseph P La Salle. An invariance principle in the theory of stability. Technical report, 1966
1966
-
[19]
J. M. Lee.Introduction to smooth manifolds. Springer, 2013
2013
-
[20]
Smooth manifolds
John M Lee. Smooth manifolds. InIntroduction to smooth manifolds, pages 1–29. Springer, 2003
2003
-
[21]
Mmp++: Motion manifold primitives with parametric curve models.IEEE Transactions on Robotics, 2024
Yonghyeon Lee. Mmp++: Motion manifold primitives with parametric curve models.IEEE Transactions on Robotics, 2024
2024
-
[22]
Neural learning of vector fields for encoding stable dynamical systems.Neurocomputing, 141:3–14, 2014
Andre Lemme, Klaus Neumann, Ren ´e Felix Reinhart, and Jochen J Steil. Neural learning of vector fields for encoding stable dynamical systems.Neurocomputing, 141:3–14, 2014
2014
-
[23]
Yaron Lipman, Ricky T. Q. Chen, Heli Ben-Hamu, Maximilian Nickel, and Matthew Le. Flow matching for generative modeling. InIntl. Conf. on Learning Representations (ICLR), 2023
2023
-
[24]
Flow straight and fast: Learning to generate and transfer data with rectified flow
Xingchao Liu, Chengyue Gong, et al. Flow straight and fast: Learning to generate and transfer data with rectified flow. InIntl. Conf. on Learning Representations (ICLR), 16 2023
2023
-
[25]
Neural contractive dynamical systems
Hadi Beik Mohammadi, Søren Hauberg, Georgios Ar- vanitidis, Nadia Figueroa, Gerhard Neumann, and Leonel Rozo. Neural contractive dynamical systems. InThe Twelfth International Conference on Learning Represen- tations, 2023
2023
-
[26]
Dynamic time warping.Information retrieval for music and motion, pages 69–84, 2007
Meinard M ¨uller. Dynamic time warping.Information retrieval for music and motion, pages 69–84, 2007
2007
-
[27]
Springer Science & Business Media, 2013
Bernt Oksendal.Stochastic differential equations: an introduction with applications. Springer Science & Business Media, 2013
2013
-
[28]
Normalizing flows for probabilistic modeling and inference.Journal of Machine Learning Research, 22(57):1–64, 2021
George Papamakarios, Eric Nalisnick, Danilo Jimenez Rezende, Shakir Mohamed, and Balaji Lakshmi- narayanan. Normalizing flows for probabilistic modeling and inference.Journal of Machine Learning Research, 22(57):1–64, 2021
2021
-
[29]
Complex patterns in a simple system
John E Pearson. Complex patterns in a simple system. Science, 261(5118):189–192, 1993
1993
-
[30]
Stable motion primitives via imitation and contrastive learning.IEEE Transactions on Robotics, 39(5):3909–3928, 2023
Rodrigo P ´erez-Dattari and Jens Kober. Stable motion primitives via imitation and contrastive learning.IEEE Transactions on Robotics, 39(5):3909–3928, 2023
2023
-
[31]
Puma: Deep metric imitation learning for stable motion primitives.Advanced Intelligent Systems, 6(11): 2400144, 2024
Rodrigo P ´erez-Dattari, Cosimo Della Santina, and Jens Kober. Puma: Deep metric imitation learning for stable motion primitives.Advanced Intelligent Systems, 6(11): 2400144, 2024
2024
-
[32]
Fast diffeomorphic matching to learn globally asymptotically stable nonlinear dynamical systems.Systems & Control Letters, 96:51–59, 2016
Nicolas Perrin and Philipp Schlehuber-Caissier. Fast diffeomorphic matching to learn globally asymptotically stable nonlinear dynamical systems.Systems & Control Letters, 96:51–59, 2016
2016
-
[33]
Euclideaniz- ing flows: Diffeomorphic reduction for learning stable dynamical systems
Muhammad Asif Rana, Anqi Li, Dieter Fox, Byron Boots, Fabio Ramos, and Nathan Ratliff. Euclideaniz- ing flows: Diffeomorphic reduction for learning stable dynamical systems. InConference on Learning for Dynamics and Control (L4DC), pages 630–639, 2020
2020
-
[34]
U-net: Convolutional networks for biomedical image segmentation
Olaf Ronneberger, Philipp Fischer, and Thomas Brox. U-net: Convolutional networks for biomedical image segmentation. InInternational Conference on Medical image computing and computer-assisted intervention, pages 234–241. Springer, 2015
2015
-
[35]
A micro lie theory for state estimation in robotics.arXiv preprint arXiv:1812.01537, 2018
Joan Sola, Jeremie Deray, and Dinesh Atchuthan. A micro lie theory for state estimation in robotics.arXiv preprint arXiv:1812.01537, 2018
-
[36]
Stable autonomous flow matching.arXiv preprint arXiv:2402.05774, 2024
Christopher Iliffe Sprague, Arne Elofsson, and Hossein Azizpour. Stable autonomous flow matching.arXiv preprint arXiv:2402.05774, 2024
-
[37]
Imitationflow: Learning deep stable stochastic dynamic systems by normalizing flows
Julen Urain, Michele Ginesi, Davide Tateo, and Jan Peters. Imitationflow: Learning deep stable stochastic dynamic systems by normalizing flows. InIEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pages 5231–5237, 2020
2020
-
[38]
Learning stable vector fields on lie groups.IEEE Robotics and Automation Letters, 7(4):12569–12576, 2022
Julen Urain, Davide Tateo, and Jan Peters. Learning stable vector fields on lie groups.IEEE Robotics and Automation Letters, 7(4):12569–12576, 2022
2022
-
[39]
Attention is all you need.Advances in neural information processing systems, 30, 2017
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Łukasz Kaiser, and Illia Polosukhin. Attention is all you need.Advances in neural information processing systems, 30, 2017
2017
-
[40]
Neural geometric fabrics: Efficiently learning high-dimensional policies from demonstration
Mandy Xie, Ankur Handa, Stephen Tyree, Dieter Fox, Harish Ravichandar, Nathan D Ratliff, and Karl Van Wyk. Neural geometric fabrics: Efficiently learning high-dimensional policies from demonstration. InCon- ference on Robot Learning, pages 1355–1367. PMLR, 2023
2023
-
[41]
Ge Yan, Jiyue Zhu, Yuquan Deng, Shiqi Yang, Ri-Zhao Qiu, Xuxin Cheng, Marius Memmel, Ranjay Krishna, Ankit Goyal, Xiaolong Wang, and Dieter Fox. Mani- Flow: A general robot manipulation policy via consis- tency flow training.arXiv preprint arXiv:2509.01819, 2025
-
[42]
Learning riemannian stable dynamical systems via diffeomorphisms
Jiechao Zhang, Hadi Beik-Mohammadi, and Leonel Rozo. Learning riemannian stable dynamical systems via diffeomorphisms. InConference on Robot Learning (CoRL), 2022
2022
-
[43]
Dif- feomorphic transforms for generalised imitation learning
Weiming Zhi, Tin Lai, Lionel Ott, and Fabio Ramos. Dif- feomorphic transforms for generalised imitation learning. InL4DC, Proceedings of Machine Learning Research, pages 508–519. PMLR, 2022. APPENDIXA EDGECASES FORHARD-CONSTRAINEDMETHODS As discussed in Secs. V-C and VII-A, a few rare edge cases compromising the stability of hard SFMDS might arise from th...
2022
-
[44]
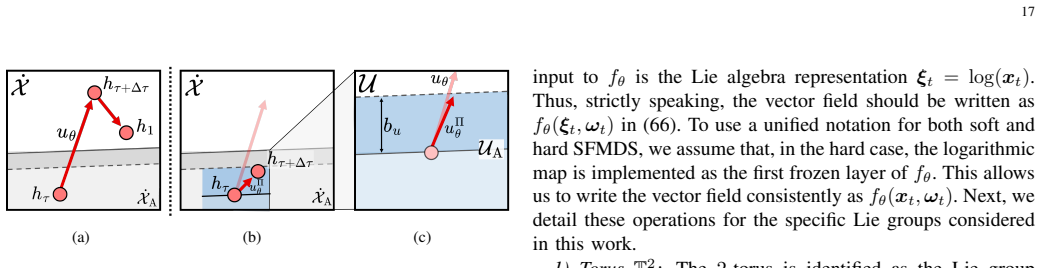
However, the same approach can be employed in the case when ˙XA(xt;θ)is a ball
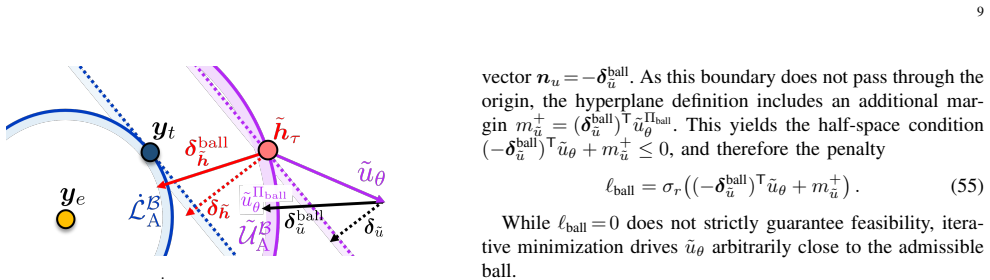
Escaping ˙XA:Next, we consider the case when ˙XA(xt;θ)is a half-space. However, the same approach can be employed in the case when ˙XA(xt;θ)is a ball. When hτ ∈ ˙XA(xt;θ), the ReLU-based projection in (29) leaves the vector fieldu θ unconstrained. In such cases, ifu θ induces motion toward the boundary of the admissible half-space, discretization effects ...
-
[45]
In this case, the latent dynamics may remain stable, while the corresponding deformation induced byJ −1 ψθ changes too abruptly in task space
Overfitting ofψ θ:In cases where the transformation ψθ varies too sharply, for instance, due to overfitting, the discretized dynamics may violate the stability conditions even when the admissible set is defined as a ball in the latent space. In this case, the latent dynamics may remain stable, while the corresponding deformation induced byJ −1 ψθ changes ...
-
[46]
SinceS 1 is isomorphic to the set of unit complex numbers{e iθ |θ∈R} ⊂C, elements on the torus can be written asx t = (eiθ1,t , eiθ2,t)∈T 2 ⊂C 2 [20, Ch
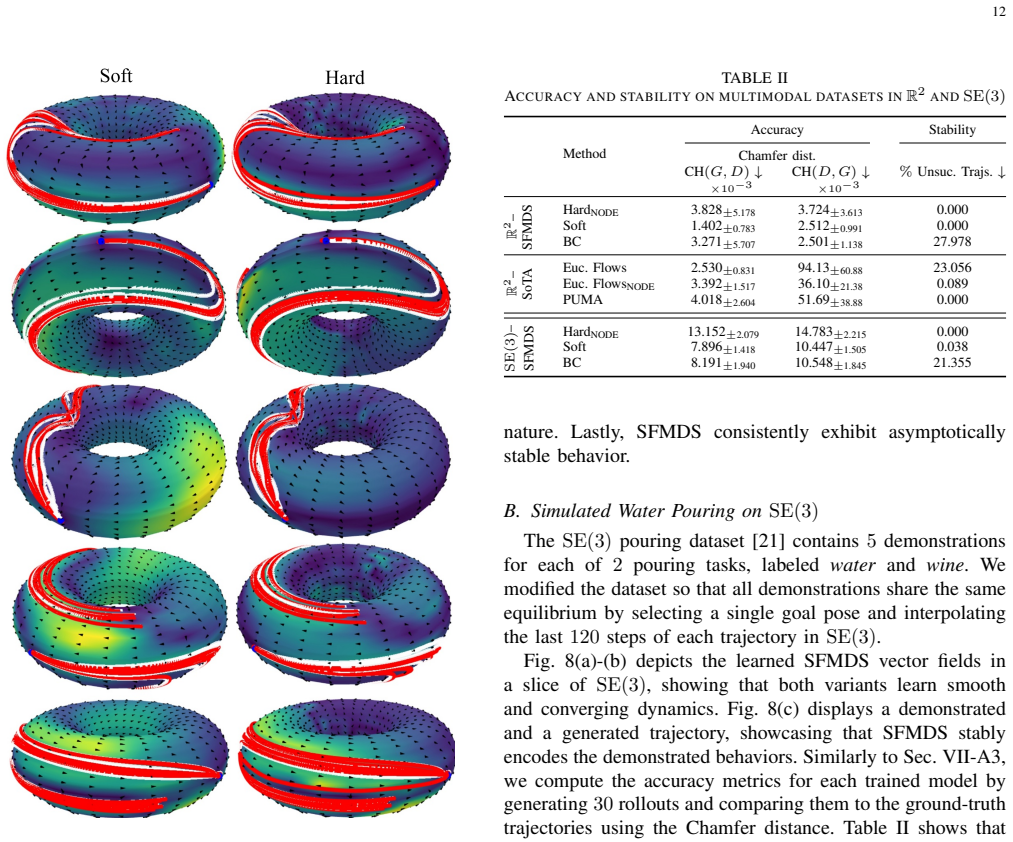
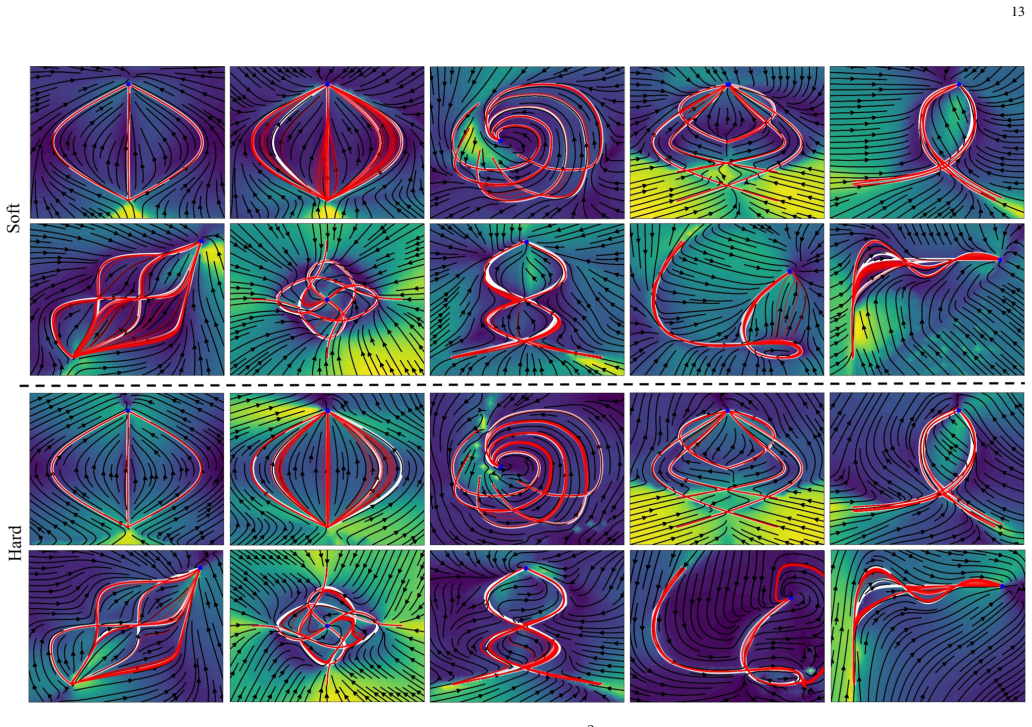
TorusT 2:The2-torus is identified as the Lie group T2 =S 1 × S1. SinceS 1 is isomorphic to the set of unit complex numbers{e iθ |θ∈R} ⊂C, elements on the torus can be written asx t = (eiθ1,t , eiθ2,t)∈T 2 ⊂C 2 [20, Ch. 7]. Its Lie algebra ist 2 ∼= R2, whose elements can be written as ξt = (θ 1,t, θ2,t). The exponential and logarithmic maps are then constr...
-
[47]
patternλ
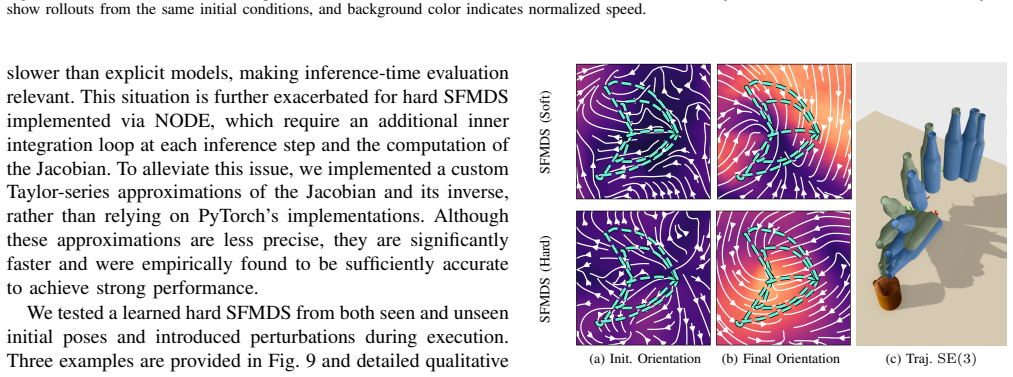
Special Euclidean groupSE(3):Each element ofSE(3) is a pose xt = Rt pt 0 1 ∈SE(3), whereR t ∈SO(3)andp t ∈R 3 denote the rotation and translation components, respectively. A Lie algebra element is written as ξt = [ωt]× vt 0⊤ 0 ∈se(3).(70) The exponential map is defined as [35], expSE(3)(ξt) = expSO(3)([ωt]×)J(ω t)v t 0⊤ 1 ,(71) where the rotational expone...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.