NeuroSymbolic Robustness Analysis for Discrete Systems with Respect to Transition Deviations
Pith reviewed 2026-06-28 08:57 UTC · model grok-4.3
The pith
A neurosymbolic framework uses LLMs to infer feasible deviation transitions and then applies symbolic computation to obtain discrete robustness guarantees over the reduced set.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a neural reasoning layer based on Large Language Models can infer a set of feasible deviation transitions, allowing a subsequent symbolic layer to compute discrete robustness guarantees over this smaller set while achieving results comparable to analyzing the full set of possible transitions.
What carries the argument
The two-layer neurosymbolic framework, where the neural layer infers feasible deviation transitions and the symbolic layer performs the robustness computation.
If this is right
- The supervised system maintains desired specifications under the inferred feasible deviations.
- The method scales better by reducing the solution space of possible deviations.
- Robustness guarantees are preserved compared to full transition-based analysis.
- The framework applies to safety properties in discrete-event systems.
Where Pith is reading between the lines
- If the LLM inference generalizes well, this could enable robustness checks for much larger discrete systems where full enumeration is intractable.
- Similar neurosymbolic splitting might apply to other formal verification tasks involving large search spaces of possible faults or deviations.
- The approach opens the possibility of incorporating real-time data or simulation to refine the feasible deviation set dynamically.
Load-bearing premise
The large language model accurately infers exactly the feasible deviation transitions without omitting any that could violate the specification or including any that are impossible.
What would settle it
A case where running the full transition-based analysis reveals either a feasible deviation missed by the LLM that breaks the guarantee or an infeasible one included by the LLM that changes the robustness conclusion.
Figures

read the original abstract
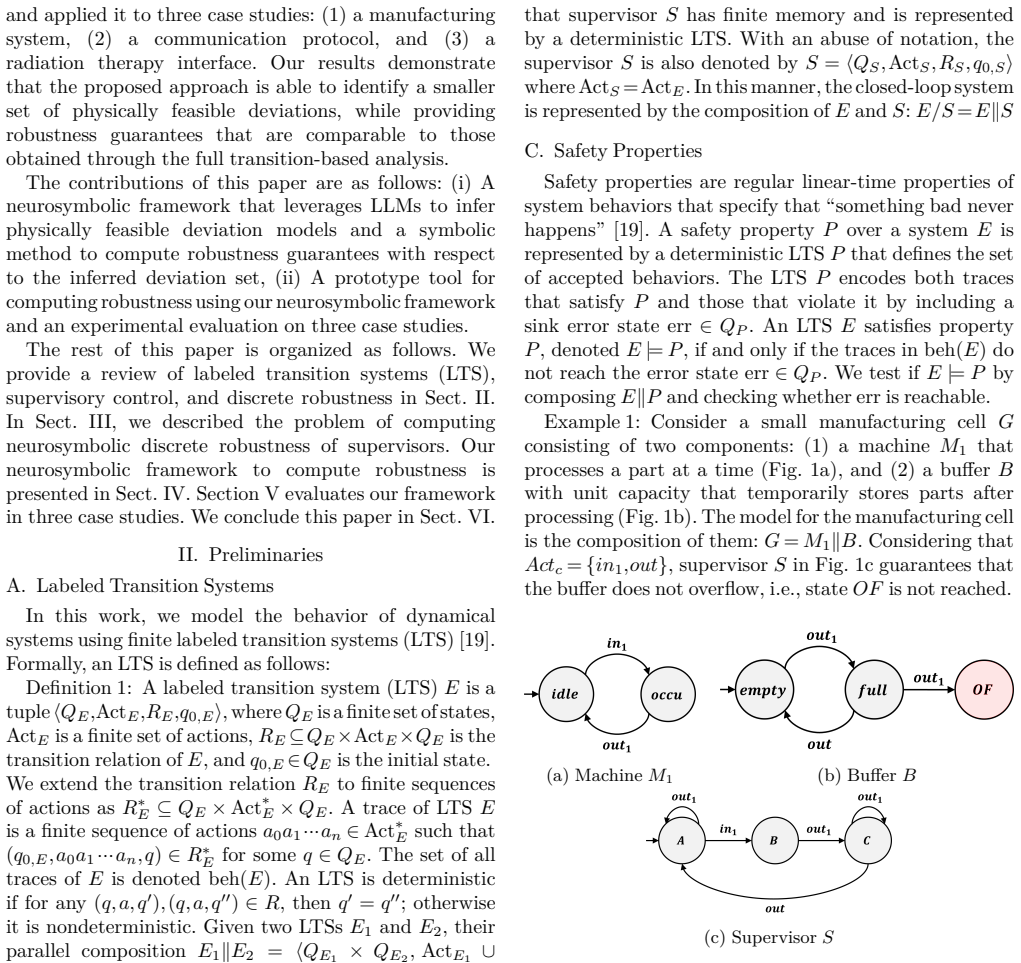
Supervisory control of discrete-event systems provides formal guarantees of correctness with respect to a plant model and specification. However, these guarantees heavily rely on the plant model, which could deviate from nominal behavior due to modeling errors or faults. Recent notions of discrete robustness model deviations as a set of additional transitions that are added to the plant. The discrete robustness is defined as all sets of extra transitions for which the supervised system still guarantees a desired specification. However, this notion suffers from scalability due to the large solution space and conservatism since most deviations are infeasible in practice. This paper proposes to address these two issues using a neurosymbolic computing framework for discrete robustness analysis of safety properties. First, a neural reasoning layer based on Large Language Models infers a set of feasible deviation transitions from system models, specifications, and domain knowledge. Next, a symbolic layer computes the discrete robustness guarantees over the inferred deviation set. We evaluate our framework on three case studies, demonstrating that our method identifies a smaller set of feasible deviations while preserving robustness guarantees comparable to those of full transition-based analysis.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
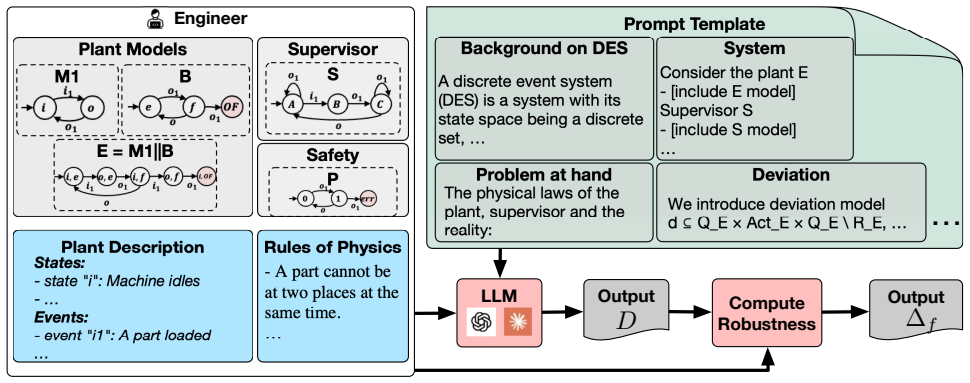
Summary. The paper proposes a neurosymbolic framework for discrete robustness analysis in supervisory control of discrete-event systems. A neural layer based on large language models infers a set of feasible deviation transitions from system models, specifications, and domain knowledge; a subsequent symbolic layer then computes the discrete robustness guarantees over this reduced set. The central claim is that the method identifies a smaller set of feasible deviations while preserving robustness guarantees comparable to those obtained from full transition-based analysis, as demonstrated via evaluation on three case studies.
Significance. If the LLM inference step reliably identifies feasible deviations without critical omissions or invalid inclusions, the framework would address key limitations of existing discrete robustness notions by improving scalability and reducing conservatism. The neurosymbolic combination is a novel procedural approach for this domain and could enable more practical application of formal robustness analysis when the empirical validation is strengthened.
major comments (2)
- [Abstract] Abstract: the claim that the method 'identifies a smaller set of feasible deviations while preserving robustness guarantees comparable to those of full transition-based analysis' rests on evaluation of three case studies, yet the abstract (and manuscript) supplies no quantitative metrics, no description of how LLM accuracy or completeness was measured, and no error analysis. This leaves the load-bearing 'comparable guarantees' assertion without empirical support.
- [Framework description] Framework description (neural reasoning layer): no soundness, completeness, or error-bound argument is supplied for the LLM inference of feasible deviation transitions. The symbolic layer's guarantees are therefore conditional on an unverified step whose failure modes (omitting feasible transitions or adding infeasible ones) directly invalidate the central claim of preserved robustness.
minor comments (1)
- [Framework description] Notation for the inferred feasible set S_feas and its relation to the full transition set should be defined explicitly with an equation or diagram in the framework section to improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which identify key areas where the manuscript can be strengthened. We address each major comment below, indicating where revisions will be made and where inherent limitations of the approach prevent formal guarantees.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the method 'identifies a smaller set of feasible deviations while preserving robustness guarantees comparable to those of full transition-based analysis' rests on evaluation of three case studies, yet the abstract (and manuscript) supplies no quantitative metrics, no description of how LLM accuracy or completeness was measured, and no error analysis. This leaves the load-bearing 'comparable guarantees' assertion without empirical support.
Authors: We agree that the manuscript does not currently include quantitative metrics, a description of LLM accuracy/completeness measurement, or error analysis. In the revised version we will expand the evaluation section (and update the abstract) to report concrete metrics from the three case studies, including the percentage reduction in deviation-set size, precision/recall of inferred transitions against expert-validated ground truth where available, and direct numerical comparison of the resulting robustness sets against the full-transition baseline. revision: yes
-
Referee: [Framework description] Framework description (neural reasoning layer): no soundness, completeness, or error-bound argument is supplied for the LLM inference of feasible deviation transitions. The symbolic layer's guarantees are therefore conditional on an unverified step whose failure modes (omitting feasible transitions or adding infeasible ones) directly invalidate the central claim of preserved robustness.
Authors: The manuscript makes no claim of formal soundness or completeness for the LLM inference step; the symbolic layer supplies exact robustness only with respect to the deviation set that the LLM produces. The central claim is therefore one of empirical comparability on the evaluated case studies rather than formal preservation. We will add an explicit limitations subsection that enumerates the possible failure modes of the neural layer and describes how the case-study results provide practical evidence that these modes did not materially affect the reported robustness sets. revision: partial
- No formal soundness, completeness, or error-bound argument can be supplied for the LLM inference step, as large language models are not formally verifiable.
Circularity Check
No circularity: neurosymbolic framework is a procedural combination without self-referential reductions
full rationale
The paper proposes a two-layer neurosymbolic method: an LLM-based neural layer infers a feasible deviation set from models/specs/domain knowledge, followed by a symbolic layer that computes robustness guarantees over that set. No equations, definitions, or self-citations are shown that reduce any output (e.g., the reported smaller feasible set or comparable guarantees) to an input quantity by construction. The approach is presented as a new combination addressing scalability and conservatism in prior discrete robustness notions; the symbolic guarantees are conditional on the neural inference step but do not collapse into it definitionally or via fitted parameters. This is a standard case of an independent procedural method evaluated on case studies, with no load-bearing self-citation chains or ansatzes smuggled in.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The plant model and specification are given as finite automata or similar discrete structures whose transition relation can be augmented by extra transitions.
- ad hoc to paper Large language models can perform reliable inference of feasible transitions when supplied with system models, specifications, and domain knowledge.
Reference graph
Works this paper leans on
-
[1]
W. M. Wonham and K. Cai, Supervisory Control of Discrete- Event Systems. Springer International Publishing, 2018
2018
-
[2]
C. G. Cassandras and S. Lafortune, Introduction to Discrete Event Systems, 3rd ed. Springer, Cham, 2021
2021
-
[3]
Supervisory control of a class of discrete event processes,
P. J. Ramadge and W. M. Wonham, “Supervisory control of a class of discrete event processes,” SIAM J. Control Optim., vol. 25, no. 1, pp. 206–230, Jan. 1987
1987
-
[4]
On the synthesis of a reactive module,
A. Pnueli and R. Rosner, “On the synthesis of a reactive module,” in Proceedings of the 16th ACM SIGPLAN-SIGACT Sympo- sium on Principles of Programming Languages, ser. POPL ’89. Association for Computing Machinery, 1989, p. 179–190
1989
-
[5]
Supervi- sory control and reactive synthesis: a comparative introduction,
R. Ehlers, S. Lafortune, S. Tripakis, and M. Y. Vardi, “Supervi- sory control and reactive synthesis: a comparative introduction,” Discrete Event Dynamic Systems, vol. 27, pp. 209–260, 2017
2017
-
[6]
On tolerance of discrete systems with respect to transition perturbations,
R. Meira-Góes, E. Kang, S. Lafortune, and S. Tripakis, “On tolerance of discrete systems with respect to transition perturbations,” Discrete Event Dynamic Systems, vol. 33, no. 4, pp. 395–424, 2023
2023
-
[7]
Active fault tolerant control of discrete event systems using online diagnostics,
A. Paoli, M. Sartini, and S. Lafortune, “Active fault tolerant control of discrete event systems using online diagnostics,” Automatica, vol. 47, no. 4, pp. 639–649, Apr. 2011
2011
-
[8]
Bounded sensor failure tolerant supervisory control,
K. Rohloff, “Bounded sensor failure tolerant supervisory control,” IF AC Proceedings Volumes, vol. 45, no. 29, pp. 272 – 277, 2012
2012
-
[9]
Robust and adaptive supervisory control of discrete event systems,
F. Lin, “Robust and adaptive supervisory control of discrete event systems,” IEEE Transactions on Automatic Control, vol. 38, no. 12, pp. 1848–1852, Dec 1993
1993
-
[10]
Model uncertainty in discrete event systems,
S. Young and V. K. Garg, “Model uncertainty in discrete event systems,” SIAM Journal on Control and Optimization, vol. 33, no. 1, pp. 208–226, 1995
1995
-
[11]
Robustness of supervisors for discrete- event systems,
J. Cury and B. Krogh, “Robustness of supervisors for discrete- event systems,” IEEE Transactions on Automatic Control, vol. 44, no. 2, pp. 376–379, 1999
1999
-
[12]
Maximizing robustness of supervisors for partially observed discrete event systems,
S. Takai, “Maximizing robustness of supervisors for partially observed discrete event systems,” Automatica, vol. 40, no. 3, pp. 531 – 535, 2004
2004
-
[13]
Supervisor synthesis to thwart cyber attack with bounded sensor reading alterations,
R. Su, “Supervisor synthesis to thwart cyber attack with bounded sensor reading alterations,” Automatica, vol. 94, pp. 35 – 44, 2018
2018
-
[14]
Dealing with sensor and actuator deception attacks in supervisory control,
R. Meira-Góes, H. Marchand, and S. Lafortune, “Dealing with sensor and actuator deception attacks in supervisory control,” Automatica, vol. 147, p. 110736, 2023
2023
-
[15]
Robust supervisory control against intermittent loss of observations,
M. V. S. Alves, J. C. Basilio, A. E. C. da Cunha, L. K. Carvalho, and M. V. Moreira, “Robust supervisory control against intermittent loss of observations,” IF AC Proceedings Volumes, vol. 47, no. 2, pp. 294 – 299, 2014
2014
-
[16]
Control of networked discrete event systems: Dealing with communication delays and losses,
F. Lin, “Control of networked discrete event systems: Dealing with communication delays and losses,” SIAM Journal on Control and Optimization, vol. 52, no. 2, pp. 1276–1298, 2014
2014
-
[17]
Safe environmental envelopes of discrete systems,
R. Meira-Góes, I. Dardik, E. Kang, S. Lafortune, and S. Tripakis, “Safe environmental envelopes of discrete systems,” in International Conference on Computer Aided Verification. Springer, 2023, pp. 326–350
2023
-
[18]
Neural-symbolic computing: An effective methodology for principled integration of machine learning and reasoning,
A. Garcez, M. Gori, L. Lamb, L. Serafini, M. Spranger, and S. Tran, “Neural-symbolic computing: An effective methodology for principled integration of machine learning and reasoning,” Journal of Applied Logics, vol. 6, no. 4, pp. 611–631, 2019
2019
-
[19]
Baier and J.-P
C. Baier and J.-P. Katoen, Principles of Model Checking. MIT Press, 2008
2008
-
[20]
Sparks of Artificial General Intelligence: Early experiments with GPT-4
S. Bubeck, V. Chandrasekaran, R. Eldan, J. Gehrke, E. Horvitz, E. Kamar, P. Lee, Y. T. Lee, Y. Li, S. Lundberg et al., “Sparks of artificial general intelligence: Early experiments with gpt-4,” arXiv preprint arXiv:2303.12712, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[21]
J. Achiam, S. Adler, S. Agarwal, L. Ahmad, I. Akkaya, F. L. Aleman, D. Almeida, J. Altenschmidt, S. Altman, S. Anadkat et al., “Gpt-4 technical report,” arXiv preprint arXiv:2303.08774, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[22]
Bert: Pre-training of deep bidirectional transformers for language understanding,
J. Devlin, M.-W. Chang, K. Lee, and K. Toutanova, “Bert: Pre-training of deep bidirectional transformers for language understanding,” in Proceedings of the 2019 conference of the North American chapter of the association for computational linguistics: human language technologies, volume 1 (long and short papers), 2019, pp. 4171–4186
2019
-
[23]
Mdesops: An open-source software tool for discrete event systems modeled by automata,
R. Meira-Góes, A. Wintenberg, S. Matsui, and S. Lafortune, “Mdesops: An open-source software tool for discrete event systems modeled by automata,” in 22nd IF AC World Congress. Elsevier BV, 2023, pp. 6093–6098
2023
-
[24]
An investigation of the Therac-25 accidents,
N. Leveson and C. Turner, “An investigation of the Therac-25 accidents,” Computer, vol. 26, no. 7, pp. 18–41, 1993
1993
-
[25]
Tel, Introduction to distributed algorithms
G. Tel, Introduction to distributed algorithms. Cambridge university press, 2000
2000
-
[26]
A behavioral notion of robustness for software systems,
C. Zhang, D. Garlan, and E. Kang, “A behavioral notion of robustness for software systems,” in Proceedings of the 28th ACM Joint Meeting on European Software Engineering Conference and Symposium on the Foundations of Software Engineering, 2020, pp. 1–12
2020
-
[27]
Increasing the LLM accuracy for question answering: Ontologies to the rescue!
D. Allemang and J. F. Sequeda, “Increasing the LLM accuracy for question answering: Ontologies to the rescue!” arXiv preprint arXiv:2405.11706, 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.