Multi-parameter persistence in dynamical systems for maximizing effects of control inputs
Pith reviewed 2026-06-27 23:47 UTC · model grok-4.3
The pith
Extending partial quality functions on dynamical systems with parameters ε and p gives sufficient conditions for optimal control perturbation paths.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
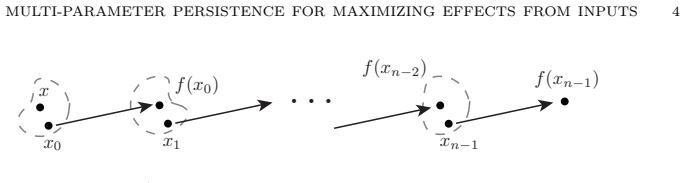
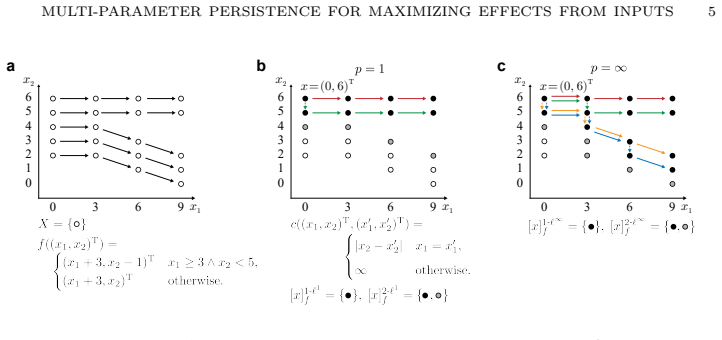
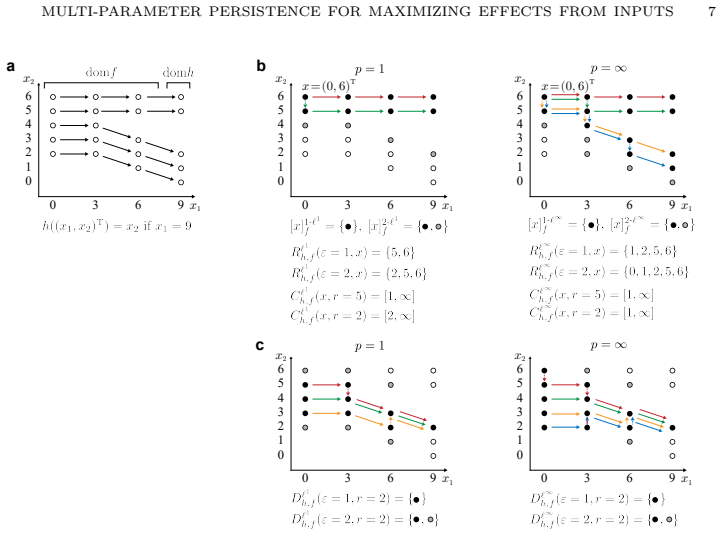
Given a partial function h evaluating quality on its domain and a dynamical system f on space X satisfying X = dom f ⊔ dom h = ⊔_{n=0}^∞ f^{-n}(dom h), the extended function h_f^{ε-ℓ^p} allows construction of a sufficient condition for the existence of an optimal ε-perturbation path from any point into dom h that minimizes h. If X is finite this function can be computed recursively. As an application the extension produces a three-parameter filtration associated with the dynamical system that identifies minimal paths and clarifies the relationship among the evaluation of the cost norm, the strength of control, and the resulting value.
What carries the argument
The ε-ℓ^p extension h_f^{ε-ℓ^p} of the partial function h, which uses the dynamical system f to define values on the whole space via perturbation paths.
If this is right
- Existing topological data analysis techniques become applicable to functions defined on the entire space rather than only on dom h.
- A sufficient condition for optimal ε-perturbation paths minimizing h can be constructed whenever the orbit decomposition holds.
- Recursive computation of the extended function becomes available on any finite space.
- A three-parameter filtration can be built from the extension to identify minimal paths.
- The interplay among cost-norm evaluation, control strength, and resulting value is made explicit through the filtration.
Where Pith is reading between the lines
- The recursive construction on finite spaces suggests that numerical approximations might extend the method to large or continuous dynamical systems.
- The three-parameter filtration could be tested on concrete control examples such as discrete-state networks to measure how well identified paths reduce the quality function.
- Adding further parameters to the filtration might capture additional constraints such as time bounds or state-dependent costs not treated in the paper.
- The approach may link to other persistence techniques used for analyzing stability in discrete dynamical systems.
Load-bearing premise
The space X must admit the decomposition into dom f and dom h such that every point reaches dom h after finitely many backward steps under f.
What would settle it
A concrete finite dynamical system f, space X, and partial h satisfying the decomposition condition, yet for which the recursively computed extension fails to produce any ε-perturbation path that minimizes h.
Figures
read the original abstract
We introduce a new topological method to naturally extend a partial function $h \colon X \rightharpoonup [-\infty, \infty]$ on a ``generalization'' of a metric space $X$ equipped with a dynamical system $f \colon X \rightharpoonup X$, to a function $h_f^{\varepsilon\text{-}\ell^p} \colon X \to [-\infty,\infty]$ with parameters $\varepsilon,p$, which allows us to apply existing topological data analysis techniques to functions defined on the whole space. Moreover, given a function $h$ that evaluates the ``quality'' of points within $\mathop{\mathrm{dom}}h$, using this extended function, one can construct a sufficient condition for the existence of an optimal $\varepsilon$-perturbation path from any point into $\mathop{\mathrm{dom}}h$ that minimizes the value of $h$ under the condition $X = \mathop{\mathrm{dom}} f \sqcup \mathop{\mathrm{dom}}h = \bigsqcup_{n = 0}^\infty f^{-n}(\mathop{\mathrm{dom}}h)$. In addition, if the domain $X$ is finite, then the function $h_f^{\varepsilon\text{-}\ell^p} \colon X \to [-\infty,\infty]$ can be computed recursively. As an application, for a given partial evaluation function on a space equipped with a dynamical system, one can construct a three-parameter filtration associated with its extension, which naturally identifies minimal paths. This clarifies the relationship among three factors: the evaluation of the cost norm, the strength of control, and the resulting value.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces a topological method to extend a partial function h : X ⇀ [-∞, ∞] on a generalization of a metric space X equipped with a dynamical system f : X ⇀ X to a full function h_f^{ε-ℓ^p} : X → [-∞, ∞] parametrized by ε and p. This extension is claimed to enable application of existing TDA techniques to the whole space. Under the hypothesis X = dom f ⊔ dom h = ⊔_{n=0}^∞ f^{-n}(dom h), the authors construct a sufficient condition for the existence of an optimal ε-perturbation path from any point into dom h that minimizes h. For finite X a recursive formula is supplied. As an application, a three-parameter filtration associated with the extension is constructed to identify minimal paths, relating the cost norm, control strength, and resulting value.
Significance. If the extension h_f^{ε-ℓ^p} and the sufficient condition are rigorously defined and shown to satisfy the stated properties, the work could supply a novel multi-parameter persistence framework linking TDA to control optimization in dynamical systems. The recursive formula for finite domains constitutes a concrete, implementable contribution. The conditional nature of the main claim is clearly stated, which is a strength.
major comments (2)
- [Abstract] Abstract: the central claims rest on the construction of the extended function h_f^{ε-ℓ^p} and the sufficient condition for optimal paths, yet the manuscript supplies neither an explicit definition of the extension, a derivation of its properties, nor any concrete example or theorem verifying that TDA can be applied or that the sufficient condition holds; this absence is load-bearing because the soundness of the claims cannot be assessed from the given material.
- [Abstract] Abstract: the decomposition hypothesis X = dom f ⊔ dom h = ⊔_{n=0}^∞ f^{-n}(dom h) is presented as a prerequisite rather than derived, but no analysis, examples, or discussion of the class of dynamical systems for which the hypothesis is satisfied is provided; without this the practical scope of the method remains unclear.
minor comments (2)
- The phrase 'generalization of a metric space' is left undefined and should be replaced by a precise description of the ambient category in which f and h are defined.
- The abstract refers to 'existing topological data analysis techniques' without naming any specific persistence module, filtration, or software that the extension is intended to interface with.
Simulated Author's Rebuttal
We thank the referee for their detailed reading and for highlighting areas where the presentation can be strengthened. We address the two major comments point by point below. Both comments identify opportunities to improve clarity and accessibility; we will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claims rest on the construction of the extended function h_f^{ε-ℓ^p} and the sufficient condition for optimal paths, yet the manuscript supplies neither an explicit definition of the extension, a derivation of its properties, nor any concrete example or theorem verifying that TDA can be applied or that the sufficient condition holds; this absence is load-bearing because the soundness of the claims cannot be assessed from the given material.
Authors: The body of the manuscript does contain the explicit definition of the extension h_f^{ε-ℓ^p} (Definition 3.1), the derivation of its key properties (Proposition 3.3 and Theorem 3.4), a concrete finite-domain example (Example 4.1), and the statement plus proof of the sufficient condition for optimal ε-perturbation paths (Theorem 4.3). The three-parameter filtration and its relation to TDA techniques are developed in Section 5. We acknowledge that the abstract is too high-level to convey these details and will revise it to include a short pointer to the relevant sections and a one-sentence indication of the main theorem. revision: yes
-
Referee: [Abstract] Abstract: the decomposition hypothesis X = dom f ⊔ dom h = ⊔_{n=0}^∞ f^{-n}(dom h) is presented as a prerequisite rather than derived, but no analysis, examples, or discussion of the class of dynamical systems for which the hypothesis is satisfied is provided; without this the practical scope of the method remains unclear.
Authors: We agree that the hypothesis is stated without accompanying discussion of its scope. The condition is required for the iterative extension to reach every point in X; it holds automatically for any finite dynamical system whose forward orbits eventually enter dom h, and for continuous systems possessing a global attractor contained in dom h. We will add a short subsection (new Section 2.2) that states the hypothesis explicitly, gives two illustrative classes of systems that satisfy it, and notes that the method does not apply to systems with periodic orbits outside dom h. This will make the practical range of applicability transparent. revision: yes
Circularity Check
No significant circularity; derivation is conditional on explicit hypothesis
full rationale
The paper introduces an extension h_f^{ε-ℓ^p} of a partial function h under the prerequisite decomposition X = dom f ⊔ dom h = ⊔_{n=0}^∞ f^{-n}(dom h). The sufficient condition for an optimal ε-perturbation path is constructed from this extension, but the decomposition is presented as an input hypothesis rather than a derived result. No equations reduce a claimed prediction or uniqueness statement to a fitted parameter or self-citation by construction. The recursive formula for finite domains is an algorithmic consequence of the definition, not a circular redefinition. The central claim remains self-contained against the stated assumptions.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption X admits a decomposition X = dom f ⊔ dom h = ⊔_{n=0}^∞ f^{-n}(dom h)
- domain assumption X is a generalization of a metric space equipped with dynamical system f
Reference graph
Works this paper leans on
-
[1]
The Journal of Machine Learning Research , volume=
Multiparameter persistence landscapes , author=. The Journal of Machine Learning Research , volume=. 2020 , publisher=
2020
-
[2]
Interactive Visualization of 2-D Persistence Modules
Interactive visual exploration of 2-D persistence modules , author=. arXiv preprint arXiv:1512.00180 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[3]
Foundations of Computational Mathematics , volume=
The theory of the interleaving distance on multidimensional persistence modules , author=. Foundations of Computational Mathematics , volume=. 2015 , publisher=
2015
-
[4]
Discrete & Computational Geometry , volume=
The theory of multidimensional persistence , author=. Discrete & Computational Geometry , volume=. 2009 , publisher=
2009
-
[5]
Proceedings of the 2020 International Conference on Representations of Algebras , year=
An introduction to multiparameter persistence , author=. Proceedings of the 2020 International Conference on Representations of Algebras , year=
2020
-
[6]
Chaos: An Interdisciplinary Journal of Nonlinear Science , volume=
Filtrations Indexed by Attracting Levels and their Applications , author=. Chaos: An Interdisciplinary Journal of Nonlinear Science , volume=
-
[7]
1978 , publisher=
Probabilities and potential, volume 29 of Mathematics studies , author=. 1978 , publisher=
1978
-
[8]
, TITLE =
Birkhoff, George D. , TITLE =. 1966 , PAGES =
1966
-
[9]
Hamiltonian dynamical systems (
Franks, John , TITLE =. Hamiltonian dynamical systems (. 1988 , DOI =
1988
-
[10]
Proceedings of the American Mathematical Society , volume=
Noncompact chain recurrence and attraction , author=. Proceedings of the American Mathematical Society , volume=
-
[11]
Ergodic Theory and Dynamical Systems , volume=
Chain recurrence and attraction in non-compact spaces , author=. Ergodic Theory and Dynamical Systems , volume=. 1991 , publisher=
1991
-
[12]
Journal of Dynamics and Differential Equations , volume=
Chain recurrence, semiflows, and gradients , author=. Journal of Dynamics and Differential Equations , volume=. 1995 , publisher=
1995
-
[13]
Trudy Matematicheskogo Instituta Imeni VA Steklova , volume=
Geodesic flows on closed Riemannian manifolds of negative curvature , author=. Trudy Matematicheskogo Instituta Imeni VA Steklova , volume=. 1967 , publisher=
1967
-
[14]
IBM RC 3932 ( \# 17806), 1972; reprinted in Ergodic Theory Dynam
The gradient structure of a flow: I , author=. IBM RC 3932 ( \# 17806), 1972; reprinted in Ergodic Theory Dynam. Systems , volume=
1972
-
[15]
1975 , PAGES =
Bowen, Rufus , TITLE =. 1975 , PAGES =
1975
-
[16]
Series in Mathematics , volume=
On axiom A diffeomorphisms, CBMS Regional Conf , author=. Series in Mathematics , volume=
-
[17]
1978 , publisher=
Isolated invariant sets and the Morse index , author=. 1978 , publisher=
1978
-
[18]
arXiv preprint arXiv:2509.13697 , year=
Coarse non-wandering sets and their filtration , author=. arXiv preprint arXiv:2509.13697 , year=
-
[19]
arXiv preprint arXiv:2504.01325 , year=
Coarse chain recurrence, Morse graphs with finite errors, and persistence of circulations , author=. arXiv preprint arXiv:2504.01325 , year=
-
[20]
Journal of differential equations , volume=
-limit sets for axiom A diffeomorphisms , author=. Journal of differential equations , volume=. 1975 , publisher=
1975
-
[21]
EGUsphere , volume=
Meteorological Landscape of Tropical Cyclone , author=. EGUsphere , volume=. 2025 , publisher=
2025
-
[22]
Journal of Geophysical Research: Atmospheres , volume=
An objective detection of separation scenario in tropical cyclone trajectories based on ensemble weather forecast data , author=. Journal of Geophysical Research: Atmospheres , volume=. 2024 , publisher=
2024
-
[23]
International Journal of Bifurcation and Chaos , volume=
Riddled basins , author=. International Journal of Bifurcation and Chaos , volume=. 1992 , publisher=
1992
-
[24]
Physica D: Nonlinear Phenomena , volume=
Fractal basin boundaries , author=. Physica D: Nonlinear Phenomena , volume=. 1985 , publisher=
1985
-
[25]
SIAM Journal on Applied Algebra and Geometry , volume =
Lesnick, Michael and Wright, Matthew , title =. SIAM Journal on Applied Algebra and Geometry , volume =
-
[26]
and Macklin, Philip S
Vipond, Oliver and Bull, Joshua A. and Macklin, Philip S. and Tillmann, Ulrike and Pugh, Christopher W. and Byrne, Helen M. and Harrington, Heather A. , title =. Proceedings of the National Academy of Sciences of the United States of America , volume =. 2021 , doi =
2021
-
[27]
Natural Hazards and Earth System Sciences , volume =
Hiraga, Yusuke and Mbugua, Jacqueline Muthoni and Kotsuki, Shunji and Suzuki, Yoshiharu and Chen, Shu-Hua and Hamada, Atsushi and Yasunaga, Kazuaki and Funatomi, Takuya , title =. Natural Hazards and Earth System Sciences , volume =. 2026 , doi =
2026
-
[28]
and Sung, Woong Je and Pinon Fischer, Olivia J
Dussauge, Thomas P. and Sung, Woong Je and Pinon Fischer, Olivia J. and Mavris, Dimitri N. , title =. Scientific Reports , volume =. 2023 , doi =
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.