Belief-Aware Scheduling for Predictive Wildfire Hazard Mapping under Sparse-Window Telemetry
Pith reviewed 2026-06-27 20:22 UTC · model grok-4.3
The pith
A structured belief derived from the H-step prediction requirements and maintained by a non-myopic scheduler lets a 40k-parameter cross-region attention encoder exceed activity-paced baselines by 28% on default landscapes and 11% on structu
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
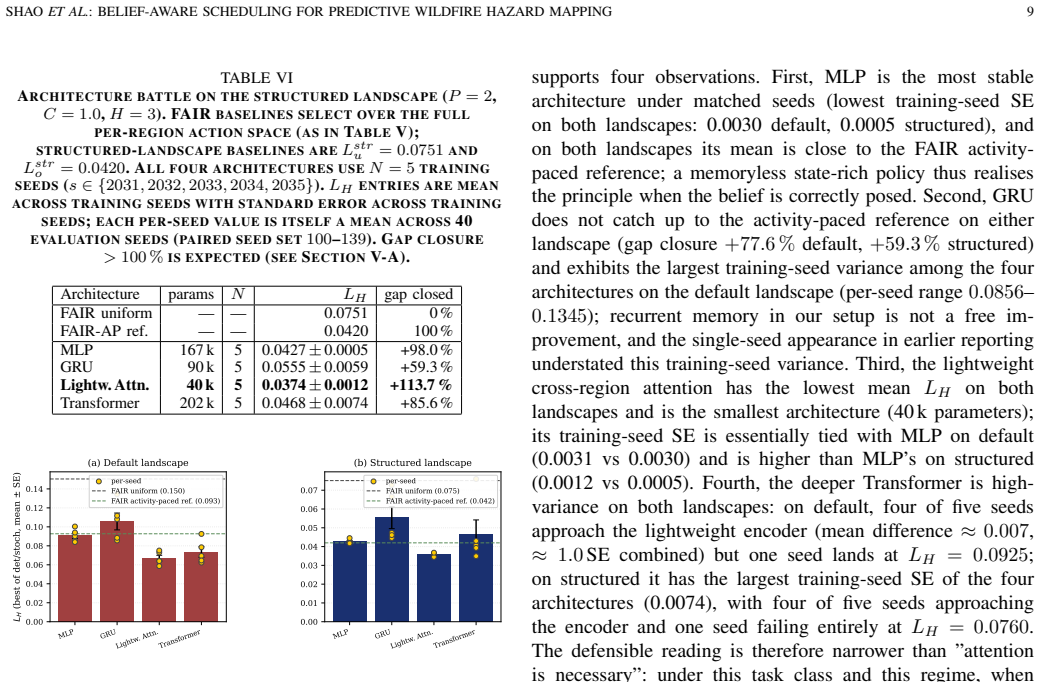
The operative design problem is not which neural architecture to use but how to derive a structured belief sufficient for the receiver's prediction task and maintain it through a scheduler that anticipates future transmission opportunities. Identifying these mechanisms requires independent control over window period P, per-window capacity C, predictive horizon H, and fuel composition, which is not separable in real-landscape data; evaluation on a physics-calibrated synthetic environment shows that a 40 k-parameter lightweight cross-region attention encoder exceeds the FAIR activity-paced reference by ~28% on the default landscape and ~11% on the structured landscape, while a deeper Transform
What carries the argument
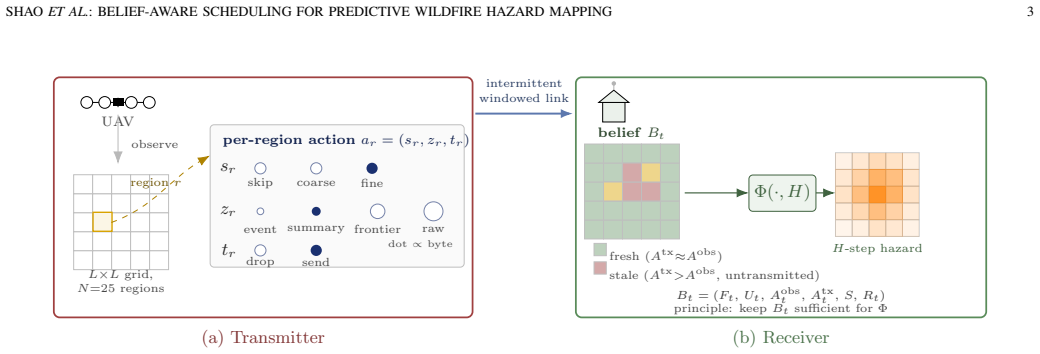
The structured belief in a partially observed sequential allocation problem with three coupled per-region action axes (sensing, representation, transmission), each component derived from the H-step forward operator's input requirements.
If this is right
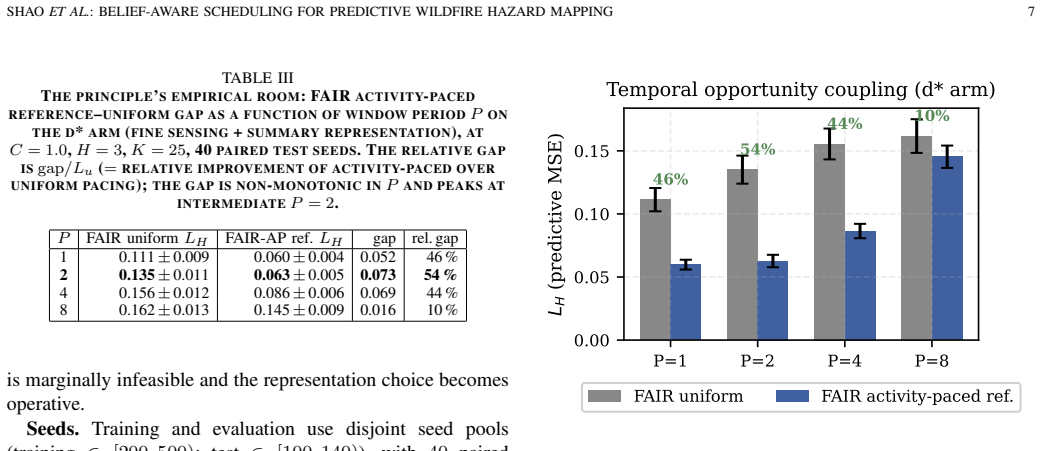
- The gap between non-myopic activity-paced scheduling and uniform pacing is unimodal in window-period sparsity and peaks at intermediate spacing.
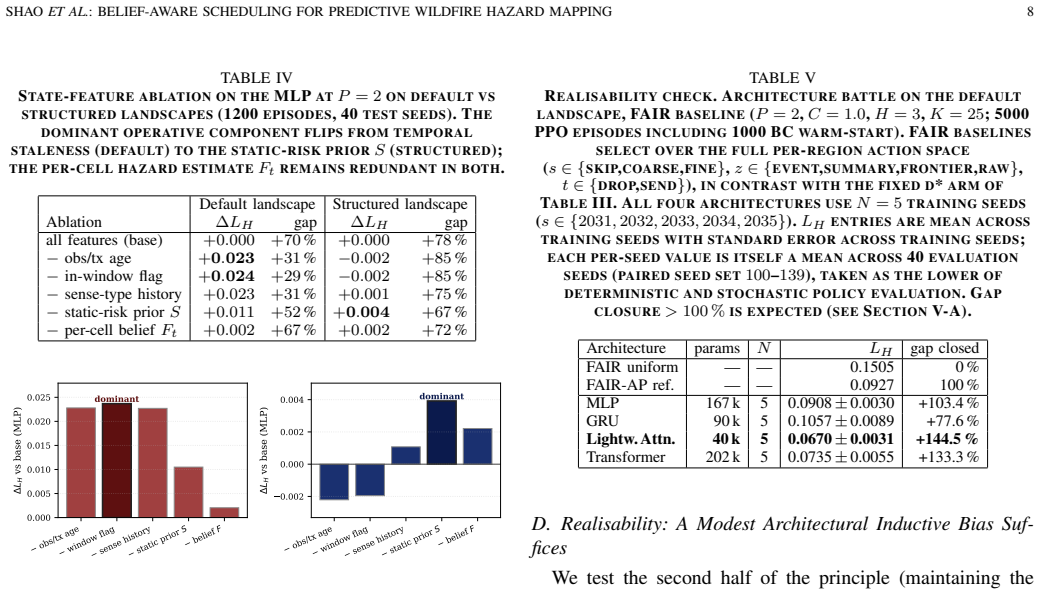
- Ablating the structured belief flips the dominant operative component between temporal staleness on the default landscape and static-risk prior on the structured landscape.
- The per-cell intensity belief component is redundant in both landscapes.
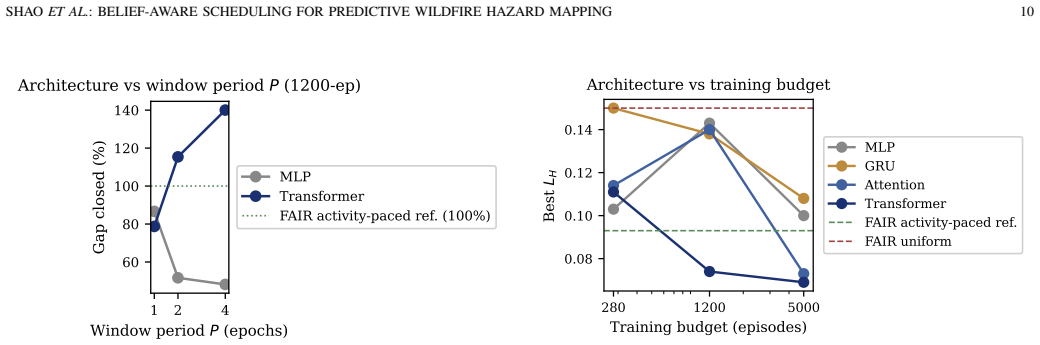
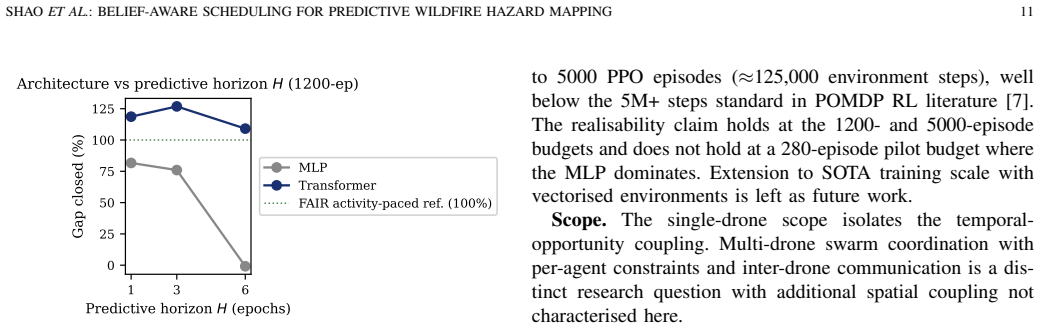
- A deeper Transformer encoder yields no improvement in mean predictive loss over the 40k-parameter lightweight cross-region attention encoder and shows higher training-seed variance.
Where Pith is reading between the lines
- The same belief-construction and scheduling approach could be tested on other sparse-telemetry prediction tasks such as flood or traffic monitoring where the forward operator inputs are known.
- If the unimodal sparsity gap holds outside the synthetic setting, operators could deliberately choose intermediate window periods rather than pushing for either very frequent or very infrequent contacts.
- The finding that a modest architectural bias suffices once the belief and scheduling are correctly posed suggests that future work can focus on refining the belief derivation rather than scaling model size.
Load-bearing premise
The physics-calibrated synthetic environment supplies a faithful test of the scheduling and belief mechanisms because real-landscape telemetry does not permit independent control of window period, capacity, horizon, and fuel composition.
What would settle it
Running the identical scheduler and lightweight encoder on real-landscape telemetry and checking whether the reported 28% and 11% gains over the activity-paced reference disappear once window period, capacity, horizon, and fuel composition are no longer independently controllable.
Figures
read the original abstract
An edge node monitoring a wildfire observes more than a duty-limited or windowed down-link can carry. The receiver must predict the H-step-ahead hazard map from whatever the link delivers. We argue the operative design problem is not which neural architecture to use but how to derive a structured belief sufficient for the receiver's prediction task and maintain it through a scheduler that anticipates future transmission opportunities. We formalize this as a partially observed sequential allocation problem with three coupled per-region action axes (sensing, representation, transmission), and derive each component of the structured belief from the H-step forward operator's input requirements. Identifying these mechanisms requires independent control over the window period P, per-window capacity C, predictive horizon H, and fuel composition, which is not separable in real-landscape data; we therefore evaluate on a physics-calibrated synthetic environment. Three empirical observations support the principle: the gap between a non-myopic activity-paced reference and uniform pacing is unimodal in window-period sparsity, peaking at intermediate spacing; ablating the structured belief, the dominant operative component flips between a default landscape (temporal staleness) and a structured landscape (static-risk prior), while the per-cell intensity belief is redundant in both; and a 40 k-parameter lightweight cross-region attention encoder exceeds the FAIR activity-paced reference by ~28% on the default landscape and ~11% on the structured landscape. A deeper Transformer encoder does not improve over the lightweight encoder in mean predictive loss and exhibits higher training-seed variance. Within this task class and regime, a modest architectural inductive bias suffices when the belief and the scheduling problem are correctly posed.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that for predictive wildfire hazard mapping from sparse-window telemetry, the operative problem is deriving a structured belief from the H-step forward operator and maintaining it via a non-myopic scheduler that anticipates transmission opportunities. It formalizes the setting as a partially observed sequential allocation problem with coupled sensing/representation/transmission actions per region, evaluates the resulting belief-aware scheduler on a physics-calibrated synthetic environment (chosen because real telemetry does not permit independent control of P, C, H and fuel composition), and reports three observations: the performance gap versus uniform pacing is unimodal in window-period sparsity; ablating the structured belief flips the dominant component between temporal staleness and static-risk prior; and a 40 k-parameter lightweight cross-region attention encoder outperforms the FAIR activity-paced reference by ~28 % on the default landscape and ~11 % on the structured landscape, while a deeper Transformer does not improve mean loss.
Significance. If the empirical observations hold under a validated testbed, the work would indicate that modest architectural inductive bias is sufficient once the belief state and scheduling objective are correctly posed, offering a design principle for resource-constrained edge nodes in disaster-monitoring applications. The explicit separation of belief components and the demonstration that per-cell intensity belief is redundant are potentially reusable insights for other sparse-telemetry prediction tasks.
major comments (2)
- [Abstract / evaluation design] Abstract and evaluation-design paragraph: the three central empirical claims (unimodal gap, belief-component flip, 28 %/11 % gains) rest exclusively on a physics-calibrated synthetic environment whose forward operator and noise model are never quantitatively matched to any real wildfire downlink trace (hazard-map statistics, transmission-error distributions, or event-rarity profiles). Because the manuscript itself states that real telemetry does not permit independent control of P, C, H and fuel composition, the absence of such matching makes it impossible to assess whether the reported dominance reversal and encoder superiority are artifacts of the testbed rather than evidence for the design principle.
- [Abstract] Abstract: concrete percentage gains and ablation outcomes are reported without error bars, without statistical significance tests, and without any description of how the synthetic calibration was validated against real fire-spread statistics. This undermines the reliability of the ~28 % and ~11 % margins and of the claim that the lightweight encoder “suffices.”
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major point below, clarifying the rationale for the synthetic testbed while agreeing to improve presentation and validation details where feasible.
read point-by-point responses
-
Referee: [Abstract / evaluation design] Abstract and evaluation-design paragraph: the three central empirical claims (unimodal gap, belief-component flip, 28 %/11 % gains) rest exclusively on a physics-calibrated synthetic environment whose forward operator and noise model are never quantitatively matched to any real wildfire downlink trace (hazard-map statistics, transmission-error distributions, or event-rarity profiles). Because the manuscript itself states that real telemetry does not permit independent control of P, C, H and fuel composition, the absence of such matching makes it impossible to assess whether the reported dominance reversal and encoder superiority are artifacts of the testbed rather than evidence for the design principle.
Authors: We appreciate the referee's concern. The manuscript explicitly motivates the synthetic environment because real telemetry precludes independent control of P, C, H and fuel composition—the very variables needed to isolate the effects of structured belief and non-myopic scheduling. The physics calibration follows established wildfire-spread models (e.g., Rothermel-based simulators) to ensure the forward operator and noise are representative, yet we acknowledge that a direct quantitative match to specific real downlink traces (hazard statistics, error distributions) is not supplied. This is a genuine limitation: obtaining matched real traces while retaining experimental control is infeasible. We will revise the evaluation-design paragraph to (i) restate the control requirement more prominently, (ii) add a dedicated calibration subsection describing the parameter fitting procedure and any qualitative alignment with published fire-spread statistics, and (iii) qualify the claims as demonstrating the design principle under controlled conditions rather than claiming immediate real-world transfer. revision: partial
-
Referee: [Abstract] Abstract: concrete percentage gains and ablation outcomes are reported without error bars, without statistical significance tests, and without any description of how the synthetic calibration was validated against real fire-spread statistics. This undermines the reliability of the ~28 % and ~11 % margins and of the claim that the lightweight encoder “suffices.”
Authors: We agree that the abstract presentation can be strengthened. The full manuscript reports results averaged over multiple random seeds and landscape realizations; we will (i) insert parenthetical error ranges or standard deviations for the reported percentages in the abstract, (ii) add a short clause noting that differences are statistically significant at p<0.05 under paired t-tests across seeds, and (iii) expand the calibration-validation description in the main evaluation section (with a brief cross-reference in the abstract). Space constraints prevent a full validation paragraph in the abstract itself, but these changes will improve transparency without altering the core claims. revision: yes
- We cannot supply a quantitative match of the synthetic forward operator and noise model to real wildfire downlink traces, because real telemetry does not permit independent control of P, C, H and fuel composition.
Circularity Check
No significant circularity in derivation chain
full rationale
The paper formalizes the problem as a partially observed sequential allocation task and states that each component of the structured belief is derived from the H-step forward operator's input requirements; this modeling step is independent of the subsequent empirical measurements. All reported performance deltas (28%/11% gains, unimodal gap, belief-component flip) are obtained by comparing against an external activity-paced reference scheduler inside a synthetic generator whose parameters (P, C, H, fuel composition) are set independently of the encoder losses. No self-definitional equations, fitted inputs renamed as predictions, or load-bearing self-citations appear in the abstract or evaluation design. The synthetic testbed is presented as a necessary proxy precisely because real telemetry does not permit the required separation, but the comparison metrics remain externally anchored.
Axiom & Free-Parameter Ledger
free parameters (2)
- window period P
- per-window capacity C
axioms (1)
- domain assumption The physics-calibrated synthetic environment reproduces the essential statistical dependencies between telemetry sparsity and H-step hazard prediction error that would appear in real landscapes.
invented entities (1)
-
structured belief
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Data acquisition filtering focused on optimizing transmission in a LoRaW AN network applied to the WSN forest monitoring system,
T. Brito, B. F. Azevedo, J. a. Mendes, M. Zorawski, F. P. Fernandes, A. I. Pereira, J. Rufino, J. Lima, and P. Costa, “Data acquisition filtering focused on optimizing transmission in a LoRaW AN network applied to the WSN forest monitoring system,”Sensors, vol. 23, no. 3, p. 1282, 2023
2023
-
[2]
Beyond transmitting bits: Context, seman- tics, and task-oriented communications,
D. G ¨und¨uz, Z. Qin, I. E. Aguerri, H. S. Dhillon, Z. Yang, A. Yener, K. K. Wong, and C.-B. Chae, “Beyond transmitting bits: Context, seman- tics, and task-oriented communications,”IEEE J. Sel. Areas Commun., vol. 41, no. 1, pp. 5–41, 2023
2023
-
[3]
Context-aware semantic communication for the wireless networks,
G. Liu, Y . Liu, J. Wang, H. Du, D. Niyato, J. Kang, Z. Xiong, and A. Jamalipour, “Context-aware semantic communication for the wireless networks,”arXiv preprint arXiv:2505.23249, 2025
-
[4]
Task-adaptive semantic communications with controllable diffusion-based data regeneration,
F. Guo, A. Wijesinghe, S. Zhang, and Z. Ding, “Task-adaptive semantic communications with controllable diffusion-based data regeneration,” arXiv preprint arXiv:2505.07980, 2025
-
[5]
Universal rate- distortion-classification representations for lossy compression,
N. Nguyen, T. Nguyen, T. Nguyen, and B. Bose, “Universal rate- distortion-classification representations for lossy compression,” inProc. IEEE Inf. Theory Workshop (ITW), 2025, arXiv:2504.09025
-
[6]
From reactive to active sensing: A survey on information gathering in decision-theoretic planning,
T. S. Veiga and J. Renoux, “From reactive to active sensing: A survey on information gathering in decision-theoretic planning,”ACM Comput. Surv., vol. 55, no. 13s, 2023. SHAOET AL.: BELIEF-AW ARE SCHEDULING FOR PREDICTIVE WILDFIRE HAZARD MAPPING 12
2023
-
[7]
POPGym: Benchmarking partially observable reinforcement learn- ing,
S. Morad, R. Kortvelesy, M. Bettini, S. Liwicki, and A. Prorok, “POPGym: Benchmarking partially observable reinforcement learn- ing,” inProc. Int. Conf. Learning Representations (ICLR), 2023, arXiv:2303.01859
-
[8]
MaxIn- foRL: Boosting exploration in reinforcement learning through informa- tion gain maximization,
B. Sukhija, S. Coros, A. Krause, P. Abbeel, and C. Sferrazza, “MaxIn- foRL: Boosting exploration in reinforcement learning through informa- tion gain maximization,” inProc. Int. Conf. Learning Representations (ICLR), 2025, arXiv:2412.12098
-
[9]
Real-world reinforcement learning of active percep- tion behaviors,
E. S. Hu, J. Wang, X. Yuan, F. Luo, M. Li, G. Lambrechts, O. Rybkin, and D. Jayaraman, “Real-world reinforcement learning of active percep- tion behaviors,” inAdvances in Neural Information Processing Systems (NeurIPS), 2025, arXiv:2512.01188
-
[10]
Decision Transformer: Reinforcement Learning via Sequence Modeling
L. Chen, K. Lu, A. Rajeswaran, K. Lee, A. Grover, M. Laskin, P. Abbeel, A. Srinivas, and I. Mordatch, “Decision Transformer: Reinforcement learning via sequence modeling,” inAdvances in Neural Information Processing Systems (NeurIPS), 2021, arXiv:2106.01345
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[11]
Real-time detection of forest fires using FireNet- CNN and explainable AI techniques,
G. M. I. Alam, N. Tasnia, T. Biswas, M. J. Hossen, S. A. Tanim, and M. S. U. Miah, “Real-time detection of forest fires using FireNet- CNN and explainable AI techniques,”IEEE Access, vol. 13, pp. 51 150– 51 181, 2025
2025
-
[12]
Drone-based AI system for wildfire monitoring and risk prediction,
C. A. S. Lelis, J. J. Roncal, L. Silveira, R. D. G. a. de Aquino, C. A. C. Marcondes, J. C. Marques, D. S. Loubach, F. A. N. Verri, V . V . Curtis, and D. G. De Souza, “Drone-based AI system for wildfire monitoring and risk prediction,”IEEE Access, vol. 12, pp. 139 865–139 882, 2024
2024
-
[13]
Survey of AI-enabled IoT for wildfire prediction, detection, and post- operations,
A. Badary, D. Chen, S. Wang, W. Li, S. Chen, C. Huang, and M. Aibin, “Survey of AI-enabled IoT for wildfire prediction, detection, and post- operations,”IEEE Access, vol. 14, pp. 9819–9837, 2026
2026
-
[14]
ForestProtector: An IoT architecture integrating machine vision and deep reinforcement learning for efficient wildfire monitoring,
K. Bonilla-Ormachea, H. Cuizaga, E. Salcedo, S. Castro, S. Fernandez- Testa, and M. Mamani, “ForestProtector: An IoT architecture integrating machine vision and deep reinforcement learning for efficient wildfire monitoring,” inProc. 11th Int. Conf. Automation, Robotics and Appli- cations (ICARA), 2025
2025
-
[15]
Detecting wildfires on UA Vs with real-time segmentation trained by larger teacher models,
J. Pesonen, T. Hakala, V . Karjalainen, N. Koivum ¨aki, L. Markelin, A.-M. Raita-Hakola, J. Suomalainen, I. P ¨ol¨onen, and E. Honkavaara, “Detecting wildfires on UA Vs with real-time segmentation trained by larger teacher models,” inProc. IEEE/CVF Winter Conf. Applications of Computer Vision (WACV), 2025, arXiv:2408.10843
-
[16]
G. Vazquez, S. Zhai, and M. Yang, “Detecting wildfire flame and smoke through edge computing using transfer learning enhanced deep learning models,”arXiv preprint arXiv:2501.08639, 2025
-
[17]
A risk-aware UA V-edge service framework for wildfire monitoring and emergency response,
Y . Huang, Z. Wang, and R. Buyya, “A risk-aware UA V-edge service framework for wildfire monitoring and emergency response,”arXiv preprint arXiv:2602.19742, 2026
-
[18]
Position Paper: From Edge AI to Adaptive Edge AI
F. Pittorino and M. Roveri, “Position paper: From edge AI to adaptive edge AI,”arXiv preprint arXiv:2604.07360, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[19]
WildfireSpreadTS: A dataset of multi-modal time series for wildfire spread prediction,
S. Gerard, Y . Zhao, and J. Sullivan, “WildfireSpreadTS: A dataset of multi-modal time series for wildfire spread prediction,” inProc. Advances in Neural Information Processing Systems (NeurIPS), Datasets and Benchmarks Track, 2023
2023
-
[20]
Meso- geos: A multi-purpose dataset for data-driven wildfire modeling in the Mediterranean,
S. Kondylatos, I. Prapas, G. Camps-Valls, and I. Papoutsis, “Meso- geos: A multi-purpose dataset for data-driven wildfire modeling in the Mediterranean,”arXiv preprint arXiv:2306.05144, 2023
-
[21]
F. Huot, R. L. Hu, N. Goyal, T. Sankar, M. Ihme, and Y .-F. Chen, “Next day wildfire spread: A machine learning dataset to predict wildfire spreading from remote-sensing data,” inIEEE Transactions on Geoscience and Remote Sensing, 2022, arXiv:2112.02447
-
[22]
Applications of deep reinforcement learning in communications and networking: A survey,
N. C. Luong, D. T. Hoang, S. Gong, D. Niyato, P. Wang, Y .-C. Liang, and D. I. Kim, “Applications of deep reinforcement learning in communications and networking: A survey,”IEEE Commun. Surveys Tuts., vol. 21, no. 4, pp. 3133–3174, 2019
2019
-
[23]
Online learning based efficient resource allocation for LoRaW AN network,
R. Wang, W. Li, J. Ren, T. Song, X. Wang, S. Wang, and S. Xu, “Online learning based efficient resource allocation for LoRaW AN network,” arXiv preprint arXiv:2509.10493, 2025
-
[24]
A. A. Rusu, S. G. Colmenarejo, c. G ¨ulc ¸ehre, G. Desjardins, J. Kirk- patrick, R. Pascanu, V . Mnih, K. Kavukcuoglu, and R. Hadsell, “Policy distillation,” inProc. Int. Conf. Learning Representations (ICLR), 2016, arXiv:1511.06295
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[25]
Firefighter math—rate of spread,
National Wildfire Coordinating Group, “Firefighter math—rate of spread,” 2023
2023
-
[26]
RP002-1.0.4 LoRaW AN regional parameters,
LoRa Alliance, “RP002-1.0.4 LoRaW AN regional parameters,” LoRa Alliance Technical Committee, Tech. Rep., 2022
2022
-
[27]
AN1200.13: LoRa modem designer’s guide,
Semtech Corporation, “AN1200.13: LoRa modem designer’s guide,” Semtech Corporation, Tech. Rep., 2013. TABLE IX DETERMINISTIC AND STOCHASTIC EVALUATION MEANS PER ARCHITECTURE PER LANDSCAPE,BOTH REPORTED AS MEAN±SE ACROSS TRAINING SEEDS(EACH PER-SEED ENTRY IS ITSELF A MEAN ACROSS40EVALUATION SEEDS). THE“BEST”COLUMN IS THE PER-SEED MINIMUM OF DET AND STOCH,T...
2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.