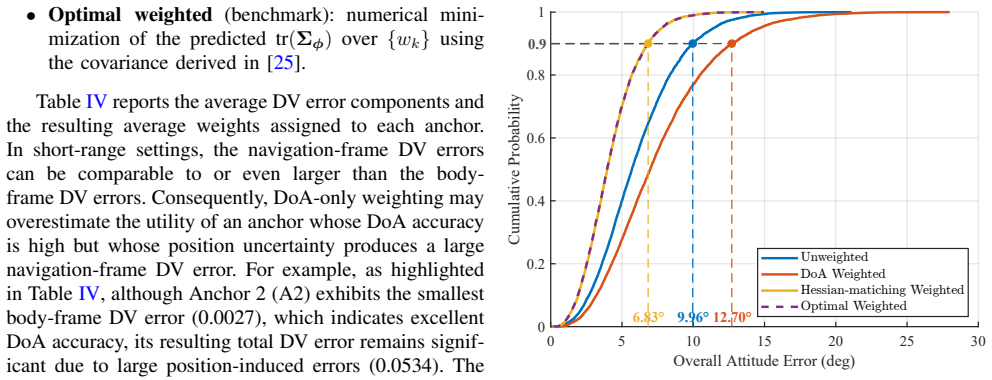
Hessian-matching Based Weighting for Attitude Determination Using Short-Range DoA Measurements with IMU Assistance
Pith reviewed 2026-06-27 20:59 UTC · model grok-4.3
The pith
Hessian-matching scalar weights let the efficient Wahba solver approximate total least squares accuracy for short-range DoA attitude determination.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
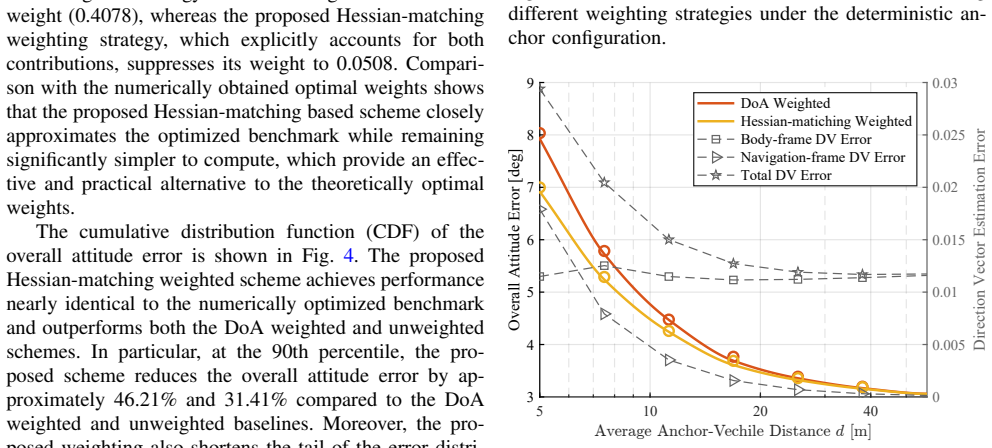
The central claim is that scalar weights obtained by matching the Hessian of the weighted Wahba formulation to the Hessian of the TLS formulation produce attitude solutions whose accuracy and robustness approach those of the full TLS solution while retaining the computational advantages of closed-form Wahba solvers; gravity augmentation further improves performance under sparse anchor conditions.
What carries the argument
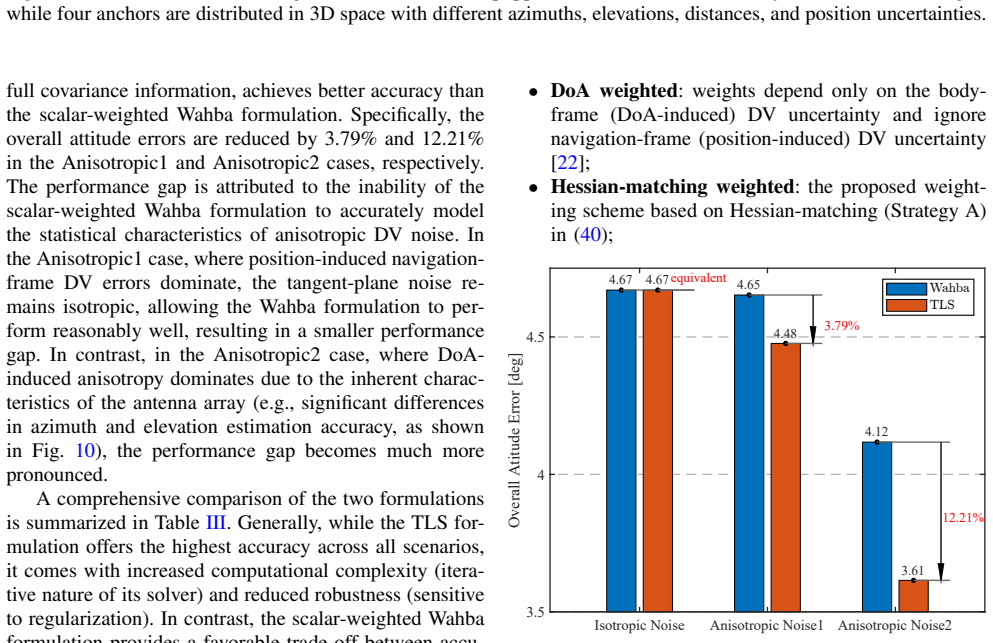
Hessian-matching based scalar weighting strategies (full-attitude and direction-of-interest variants) that align the curvature of the Wahba problem with the TLS problem, enabling closed-form solution of the covariance-weighted orthogonal Procrustes problem.
If this is right
- The Hessian-matched weights improve accuracy and robustness relative to existing scalar-weight baselines.
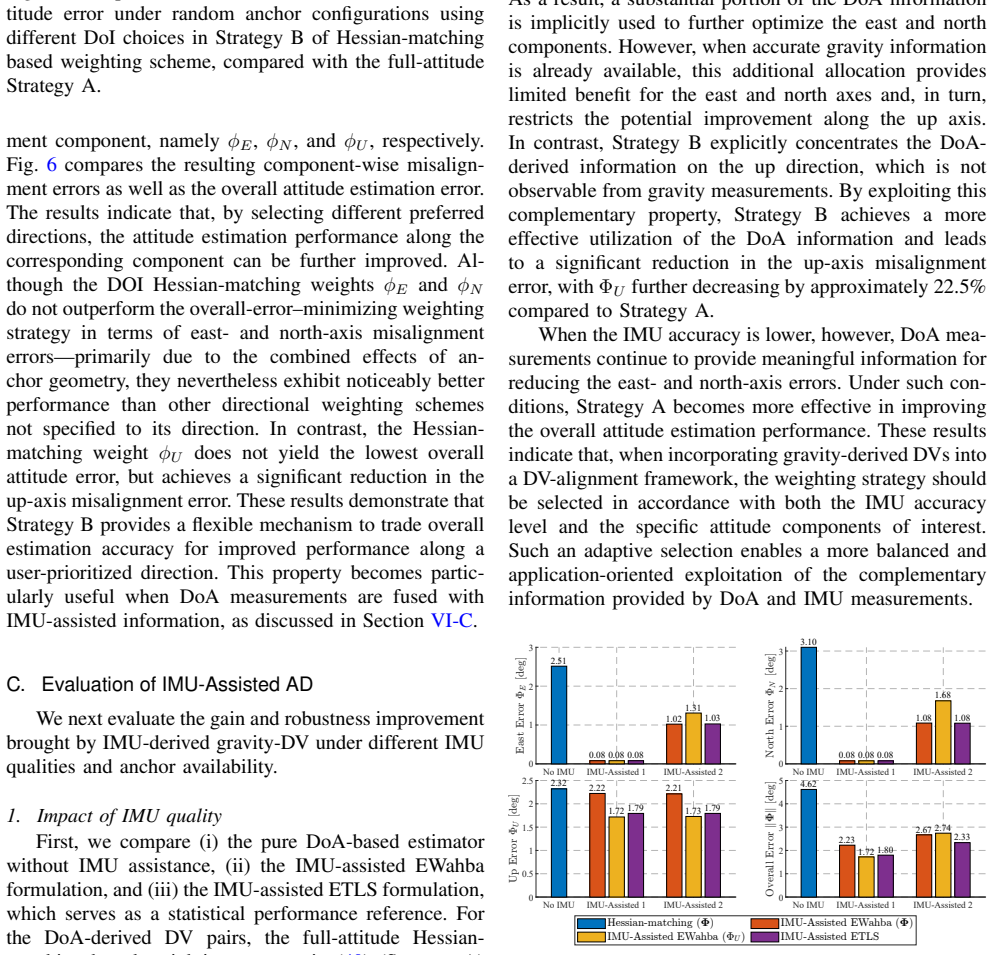
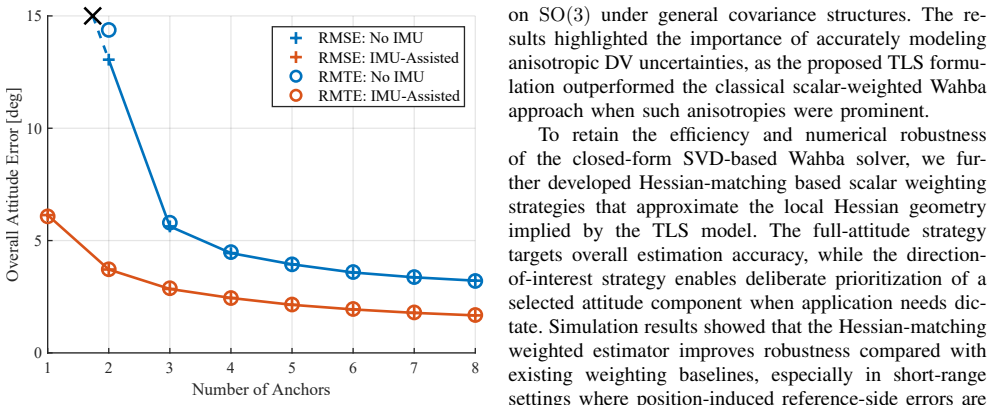
- Gravity-DV augmentation from the IMU reduces attitude errors and raises solution availability when the number of anchors is small.
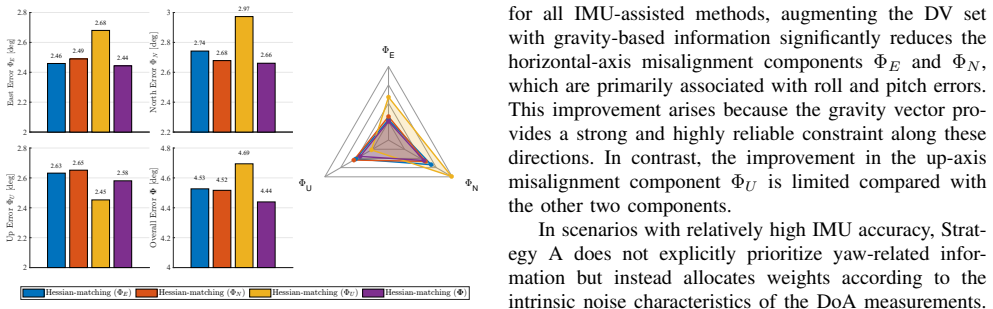
- The direction-of-interest variant allows selective improvement of accuracy along a chosen attitude axis.
- The approach keeps the numerical robustness and speed of closed-form Wahba while incorporating the anisotropic-error modeling of TLS.
Where Pith is reading between the lines
- The same Hessian-matching construction could be tested on other vector-alignment tasks that exhibit anisotropic measurement errors.
- Hardware experiments with real wireless arrays and IMU data would reveal whether unmodeled effects such as multipath or calibration drift invalidate the scalar-weight approximation.
- Embedding the weighted solution inside a recursive filter could extend the method from static snapshots to continuous dynamic tracking.
Load-bearing premise
The scalar Hessian-matching weights derived from the TLS formulation can be applied to the Wahba problem without introducing substantial approximation error that would degrade the attitude solution in the short-range regime with anisotropic DV errors.
What would settle it
A Monte Carlo trial that compares the attitude error statistics of the Hessian-matched Wahba solution against the full manifold TLS solution while steadily increasing anchor-position uncertainty; a statistically significant divergence would falsify the approximation claim.
Figures
read the original abstract
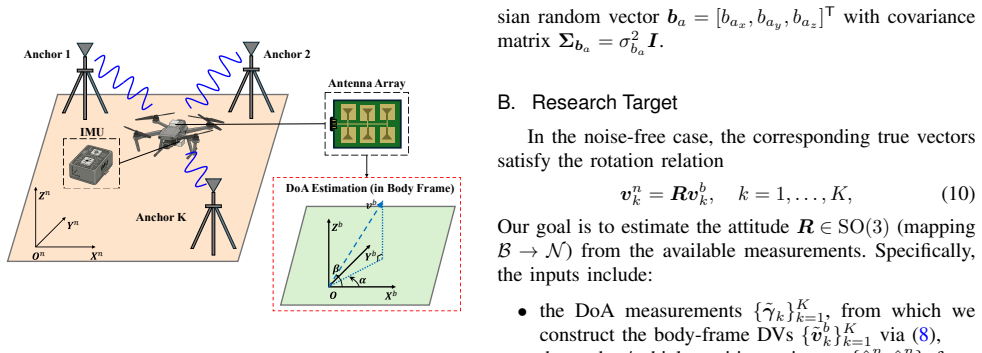
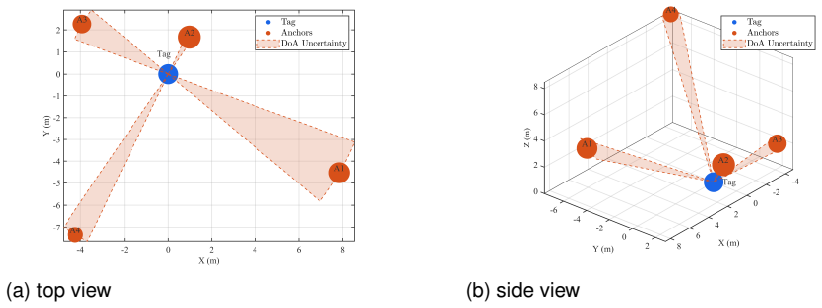
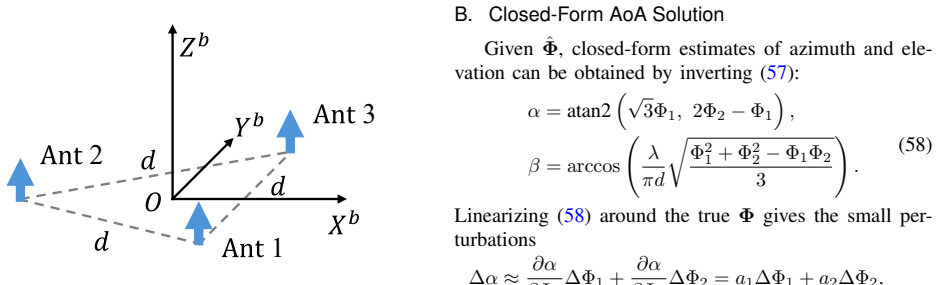
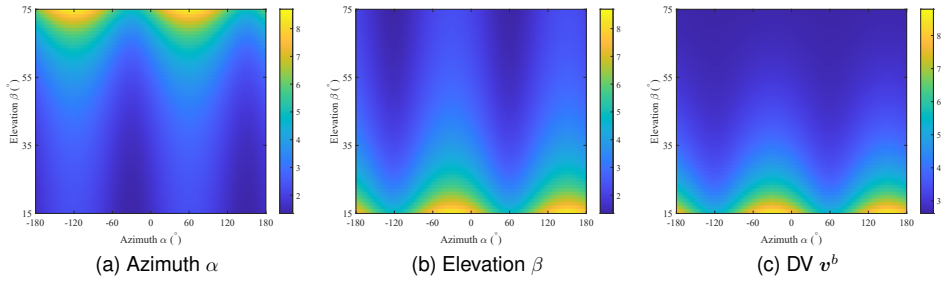
Accurate and reliable attitude determination (AD) is essential for unmanned vehicles operating in Global Navigation Satellite System (GNSS)-denied environments. Short-range wireless arrays can provide direction-of-arrival (DoA) measurements from multiple anchors, enabling AD by aligning corresponding direction vectors (DVs) expressed in the body and navigation frames. In short-range scenarios, navigation-frame DVs inherit non-negligible uncertainty induced by anchor/vehicle position errors in addition to DoA-induced errors in body-frame DVs. Moreover, due to projection and unit-norm normalization, the DV errors are generally anisotropic, which motivates a total least squares (TLS) viewpoint. This paper identifies the key modeling distinction in short-range AD, develops a TLS-consistent formulation based on the total DV error and solves the resulting covariance-weighted orthogonal Procrustes problem via a manifold Gauss--Newton method. To retain the efficiency and numerical robustness of the closed-form weighted Wahba solution, we further propose Hessian-matching based scalar weighting strategies that approximate the Hessian of Wahba formulation to the TLS formulation, including a full-attitude strategy for overall accuracy and a direction-of-interest (DOI) strategy for prioritizing a selected attitude component. Finally, we incorporate IMU-derived gravity as an additional DV pair for static initialization, leading to extended Wahba and extended TLS formulations. Simulation results demonstrate that the proposed Hessian-matching weighting improves accuracy and robustness compared with existing baselines, and that gravity-DV augmentation further reduces attitude errors and improves solution availability under limited anchor availability.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that short-range DoA-based attitude determination involves anisotropic total DV errors (from position-induced navigation-frame uncertainty plus body-frame DoA errors), motivating a TLS formulation of the covariance-weighted orthogonal Procrustes problem solved via manifold Gauss-Newton; to retain the efficiency of closed-form weighted Wahba, it introduces Hessian-matching scalar weights (full-attitude and DOI variants) that approximate the TLS Hessian, plus IMU gravity-DV augmentation, with simulations showing accuracy and robustness gains over baselines.
Significance. If the Hessian-matching approximation error remains small relative to the claimed gains, the method supplies an efficient, closed-form route to TLS-consistent attitude solutions for real-time GNSS-denied navigation without requiring iterative manifold optimization at runtime; the gravity augmentation also addresses limited-anchor availability. The work is grounded in explicit error modeling and supplies both a reference TLS solver and practical approximations.
major comments (1)
- [Simulation results (and associated TLS formulation)] The central claim that Hessian-matching scalar weights improve accuracy and robustness rests on the unquantified approximation error between the proposed weights and the manifold Gauss-Newton TLS reference solver. The manuscript presents the TLS solver but does not report attitude-error differences (or residual statistics) between the two on the same short-range anisotropic Monte-Carlo trials, leaving open whether the scalar weights preserve sufficient TLS optimality when the 3x3 DV covariance is markedly anisotropic.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The major comment highlights a valid point regarding the need for explicit quantification of the Hessian-matching approximation error. We address this below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Simulation results (and associated TLS formulation)] The central claim that Hessian-matching scalar weights improve accuracy and robustness rests on the unquantified approximation error between the proposed weights and the manifold Gauss-Newton TLS reference solver. The manuscript presents the TLS solver but does not report attitude-error differences (or residual statistics) between the two on the same short-range anisotropic Monte-Carlo trials, leaving open whether the scalar weights preserve sufficient TLS optimality when the 3x3 DV covariance is markedly anisotropic.
Authors: We agree that reporting attitude-error differences and residual statistics between the Hessian-matching weights and the manifold Gauss-Newton TLS solver on identical short-range anisotropic Monte-Carlo trials would strengthen validation of the approximation. In the revised manuscript we will add these comparisons, including mean attitude errors (and standard deviations) for both the full-attitude and DOI Hessian-matching strategies versus the TLS reference under the same anisotropic 3x3 DV covariance conditions used in the existing simulations. This will quantify the approximation error and confirm it remains small relative to the observed gains over standard weighted Wahba baselines. revision: yes
Circularity Check
No circularity: derivation proceeds from explicit TLS error model to Hessian approximation without reduction to inputs or self-citations
full rationale
The paper derives a covariance-weighted orthogonal Procrustes problem directly from the total DV error model (anisotropic short-range errors), solves it via manifold Gauss-Newton as reference, and then constructs scalar weights by explicit Hessian matching to enable closed-form Wahba use. This matching is presented as an approximation strategy rather than a definitional identity or fitted parameter renamed as prediction. No load-bearing self-citation, uniqueness theorem, or ansatz smuggling appears in the abstract or described chain; the central claim rests on the modeling distinction and the approximation's empirical performance in simulations, which are independent of the derivation itself. The approach is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Direction vector errors are anisotropic due to projection and unit-norm normalization.
- standard math The covariance-weighted orthogonal Procrustes problem can be solved via manifold Gauss-Newton optimization.
Reference graph
Works this paper leans on
-
[1]
Coastal and environmental remote sensing from unmanned aerial vehicles: An overview,
V . V . Klemas, “Coastal and environmental remote sensing from unmanned aerial vehicles: An overview,”J. Coastal Res., vol. 31, no. 5, pp. 1260–1267, 2015
2015
-
[2]
Application of unmanned aerial vehicles in logistics: a literature review,
Y . Li, M. Liu, and D. Jiang, “Application of unmanned aerial vehicles in logistics: a literature review,”Sustainability, vol. 14, no. 21, 2022, Art. no. 14473
2022
-
[3]
Unmanned aerial vehicles (UA V) in precision agriculture: Applications and challenges,
P. Velusamy, S. Rajendran, R. K. Mahendran, S. Naseer, M. Shafiq, and J.-G. Choi, “Unmanned aerial vehicles (UA V) in precision agriculture: Applications and challenges,”Energies, vol. 15, no. 1, 2021, Art. no. 217
2021
-
[4]
Use of unmanned aerial vehicle for quantitative infrastructure evaluation,
A. Ellenberg, L. Branco, A. Krick, I. Bartoli, and A. Kontsos, “Use of unmanned aerial vehicle for quantitative infrastructure evaluation,”J. Infrastruct. Syst., vol. 21, no. 3, 2015, Art. no. 04014054
2015
-
[5]
Formation control and network local- ization via orientation alignment,
K.-K. Oh and H.-S. Ahn, “Formation control and network local- ization via orientation alignment,”IEEE Trans. Autom. Control, vol. 59, no. 2, pp. 540–545, 2013
2013
-
[6]
Search and tracking algorithms for swarms of robots: A survey,
M. Senanayakeet al., “Search and tracking algorithms for swarms of robots: A survey,”Robot. Auton. Syst., vol. 75, pp. 422–434, 2016
2016
-
[7]
Tightly coupled UWB/IMU pose estimation,
J. D. Hol, F. Dijkstra, H. Luinge, and T. B. Schon, “Tightly coupled UWB/IMU pose estimation,” inProc. IEEE Int. Conf. Ultra-Wideband, Vancouver, BC, Canada, 2009, pp. 688–692
2009
-
[8]
Kalman- filter-based integration of IMU and UWB for high-accuracy indoor positioning and navigation,
D. Feng, C. Wang, C. He, Y . Zhuang, and X.-G. Xia, “Kalman- filter-based integration of IMU and UWB for high-accuracy indoor positioning and navigation,”IEEE Internet Things J., vol. 7, no. 4, pp. 3133–3146, 2020
2020
-
[9]
Parameterized TDOA: TDOA estimation for mobile target localization in a time-division broadcast positioning system,
C. Tu, X. Cui, G. Liu, S. Zhao, and M. Lu, “Parameterized TDOA: TDOA estimation for mobile target localization in a time-division broadcast positioning system,”IEEE Internet Things J., vol. 12, no. 13, pp. 24131–24147, 2025
2025
-
[10]
A decoupled localization and synchronization method for moving targets using sequential one-way TOA measurements,
C. Tu, X. Cui, G. Liu, and M. Lu, “A decoupled localization and synchronization method for moving targets using sequential one-way TOA measurements,” inProc. IEEE Int. Conf. Commun. (ICC), Montreal, QC, Canada, 2025, pp. 2478–2484
2025
-
[11]
Research on algorithms for multi-vector attitude determination,
Y . Liu, R. Yu, Z. Xiong, and Y . Guo, “Research on algorithms for multi-vector attitude determination,”Math. Probl. Eng., vol. 2022, 2022, Art. no. 6137308, doi: 10.1155/2022/6137308
-
[12]
Star trackers for attitude determination,
C. C. Liebe, “Star trackers for attitude determination,”IEEE Aerosp. Electron. Syst. Mag., vol. 10, no. 6, pp. 10–16, Jun. 1995, doi: 10.1109/62.387971
-
[13]
Global magnetic attitude control of spacecraft in the presence of gravity gradient,
M. Lovera and A. Astolfi, “Global magnetic attitude control of spacecraft in the presence of gravity gradient,”IEEE Trans. Aerosp. Electron. Syst., vol. 42, no. 3, pp. 796–805, Jul. 2006, doi: 10.1109/TAES.2006.248214
-
[14]
Titterton and J
D. Titterton and J. L. Weston,Strapdown Inertial Navigation Technology, vol. 17. London, U.K.: IET, 2004
2004
-
[15]
P. J. G. Teunissen and O. Montenbruck, Eds.,Springer Handbook of Global Navigation Satellite Systems, vol. 10. Cham, Switzer- land: Springer, 2017
2017
-
[16]
Robust joint multi-antenna spoofing detection and attitude estimation using direction assisted multiple hypotheses RAIM,
M. Meurer, A. Konovaltsev, M. Cuntz, and C. H ¨attich, “Robust joint multi-antenna spoofing detection and attitude estimation using direction assisted multiple hypotheses RAIM,” inProc. ION GNSS, Nashville, TN, USA, 2012, pp. 3007–3016
2012
-
[17]
Precise GNSS attitude determination based on antenna array processing,
S. Daneshmand, N. Sokhandan, and G. Lachapelle, “Precise GNSS attitude determination based on antenna array processing,” inProc. ION GNSS+, Tampa, FL, USA, 2014, pp. 2555–2562
2014
-
[18]
Performance evaluation of high sensitivity GNSS techniques in indoor, urban and space environments,
E. Dom ´ınguezet al., “Performance evaluation of high sensitivity GNSS techniques in indoor, urban and space environments,” in Proc. ION GNSS+, Portland, OR, USA, 2016, pp. 373–393
2016
-
[19]
Angle of arrival estimation using decawave DW1000 integrated circuits,
I. Dotlic, A. Connell, H. Ma, J. Clancy, and M. McLaughlin, “Angle of arrival estimation using decawave DW1000 integrated circuits,” inProc. 14th Workshop Posit. Navig. Commun. (WPNC), Bremen, Germany, 2017, pp. 1–6
2017
-
[20]
High- accuracy 2-D AoA estimation using lightweight UWB arrays,
Y . Li, H. Zhao, Y . Liu, T. Wang, J. Yu, and Y . Shen, “High- accuracy 2-D AoA estimation using lightweight UWB arrays,” in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), Abu Dhabi, UAE, 2024, pp. 3312–3317
2024
-
[21]
K. Xiao, F. Hao, W. Zhang, N. Li, and Y . Wang, “Research and implementation of indoor positioning algorithm based on bluetooth AUTHOR ET AL.: SHORT ARTICLE TITLE 15 5.1 AOA and AOD,”Sensors, vol. 24, no. 14, 2024, Art. no. 4579, doi: 10.3390/s24144579
-
[22]
Attitude de- termination using GNSS DOA estimation under jamming,
C. Wang, X. Cui, G. Liu, and M. Lu, “Attitude de- termination using GNSS DOA estimation under jamming,” IEEE Trans. Aerosp. Electron. Syst., early access, 2025, doi: 10.1109/TAES.2025.3630146
-
[23]
Total least-squares formulation of Wahba’s problem,
G. Chang, “Total least-squares formulation of Wahba’s problem,” Electron. Lett., vol. 51, no. 17, pp. 1334–1335, 2015
2015
-
[24]
A least squares estimate of satellite attitude,
G. Wahba, “A least squares estimate of satellite attitude,”SIAM Rev., vol. 7, no. 3, pp. 409–409, 1965
1965
-
[25]
Attitude determination using vector observations and the singular value decomposition,
F. L. Markley, “Attitude determination using vector observations and the singular value decomposition,”J. Astronaut. Sci., vol. 38, pp. 245–258, 1988
1988
-
[26]
Accurate attitude estimation of a moving land vehicle using low-cost MEMS IMU sensors,
H. Ahmed and M. Tahir, “Accurate attitude estimation of a moving land vehicle using low-cost MEMS IMU sensors,”IEEE Trans. Intell. Transp. Syst., vol. 18, no. 7, pp. 1723–1739, Jul. 2017, doi: 10.1109/TITS.2016.2627536
-
[27]
R. de Celis and L. Cadarso, “Attitude determination algorithms through accelerometers, GNSS sensors, and gravity vector esti- mator,”Int. J. Aerosp. Eng., vol. 2018, 2018, Art. no. 5394057, doi: 10.1155/2018/5394057
-
[28]
D. Gebre-Egziabher, G. H. Elkaim, J. D. Powell, and B. W. Parkinson, “A gyro-free quaternion-based attitude determination system suitable for implementation using low cost sensors,” in Proc. IEEE Position Location Navig. Symp. (PLANS), San Diego, CA, USA, 2000, pp. 185–192, doi: 10.1109/PLANS.2000.838301
-
[29]
Nocedal and S
J. Nocedal and S. J. Wright,Numerical Optimization, 2nd ed. New York, NY , USA: Springer, 2006
2006
-
[30]
Wheel-INS: A wheel-mounted MEMS IMU-based dead reckoning system,
X. Niu, Y . Wu, and J. Kuang, “Wheel-INS: A wheel-mounted MEMS IMU-based dead reckoning system,”IEEE Trans. Veh. Technol., vol. 70, no. 10, pp. 9814–9825, 2021. [31]IEEE Standard for Low-Rate Wireless Networks–Amendment 1: Enhanced Ultra Wideband (UWB) Physical Layers (PHYs) and Associated Ranging Techniques, IEEE Standard 802.15.4z-2020, 2020. [32]DW3000...
2021
-
[31]
Available: https://www.analog.com/media/en/ technical-documentation/data-sheets/adis16465.pdf [34]MPU-6000 and MPU-6050 Product Specification, Rev
[Online]. Available: https://www.analog.com/media/en/ technical-documentation/data-sheets/adis16465.pdf [34]MPU-6000 and MPU-6050 Product Specification, Rev. 3.4, InvenSense Inc., Sunnyvale, CA, USA, Aug. 2013. [On- line]. Available: https://invensense.tdk.com/wp-content/uploads/ 2015/02/MPU-6000-Datasheet1.pdf
2013
-
[32]
A UWB- AOA/IMU integrated navigation system for 6-DoF indoor UA V localization,
P. Zhao, H. Zhang, G. Liu, X. Cui, and M. Lu, “A UWB- AOA/IMU integrated navigation system for 6-DoF indoor UA V localization,”Drones, vol. 9, no. 8, Aug. 2025, Art. no. 546. Chenxin Tureceived the B.E. degree in elec- tronic engineering from Tsinghua University, Beijing, China, in 2022, where he is currently pursuing the Ph.D. degree with the Department ...
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.