Tracking the Effective Surface Area of Non-Convex Satellites
Pith reviewed 2026-06-27 15:25 UTC · model grok-4.3
The pith
A backstepping controller enables non-convex satellites to track commanded effective surface area while executing other attitude maneuvers.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed backstepping control algorithm tracks a reference effective surface area for non-convex satellites by regulating attitude, permits simultaneous maneuvers, and guarantees asymptotic stability of the resulting equilibria.
What carries the argument
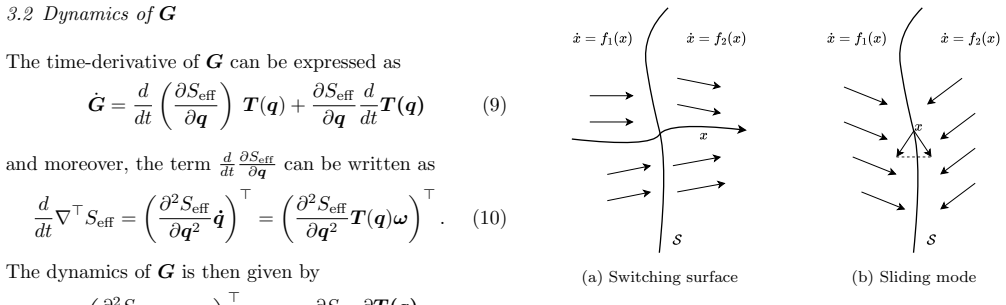
Backstepping control algorithm that treats effective surface area as a function of attitude and drives the attitude error dynamics to zero.
If this is right
- Aerodynamic drag becomes a usable actuator for orbital control without preventing other attitude tasks.
- The same controller structure can be extended to maximize solar-panel exposure at the same time.
- Closed-loop equilibria remain asymptotically stable under the stated design.
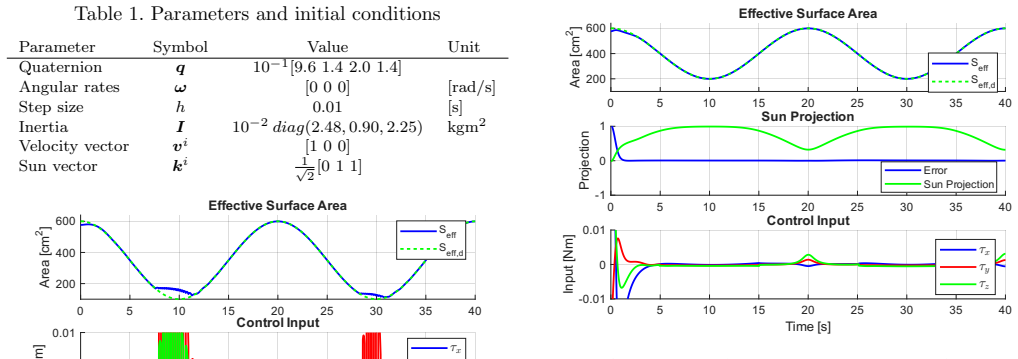
- Simulation results show the tracking error goes to zero for the tested cases.
Where Pith is reading between the lines
- The approach could reduce the need for dedicated propulsion for drag-based orbit maintenance.
- Similar attitude-to-force mapping might be applied to solar-radiation-pressure control on the same satellites.
- Real-world validation would require accurate on-orbit measurement of the actual projected area under varying attitudes.
Load-bearing premise
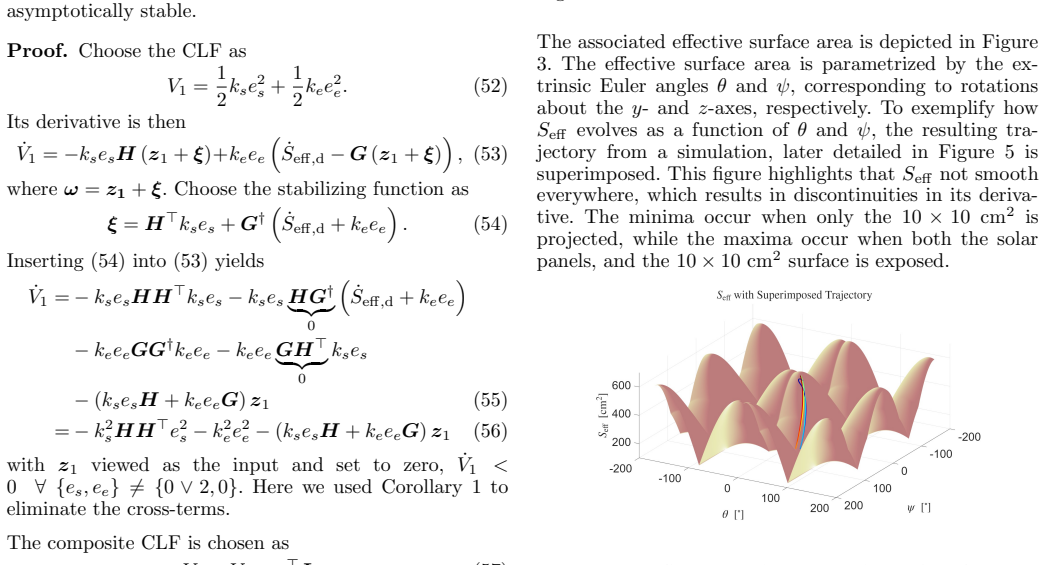
Effective surface area is a controllable function of attitude alone and the rigid-body dynamics model is accurate enough for the backstepping design to succeed.
What would settle it
A hardware or high-fidelity simulation test in which the satellite fails to converge to the commanded surface area when the attitude reference is changed while other maneuvers are commanded.
Figures
read the original abstract
This paper presents a novel framework to track the effective surface area of non-convex satellites, enabling the use of aerodynamic drag in low Earth orbit for orbital control. The proposed framework enables the satellite to track the effective surface area while simultaneously performing other maneuvers. We introduce this framework through a backstepping control algorithm, and exemplify its advantages with an extension, to simultaneously maximize solar panel exposure. The equilibria of the closed-loop systems are shown to be asymptotically stable, and simulation results confirm the effectiveness of the proposed framework.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a backstepping control framework for tracking the effective (projected) surface area of non-convex satellites in LEO to enable aerodynamic drag modulation for orbital control. The framework allows simultaneous attitude maneuvers (e.g., solar-panel maximization) and claims that the equilibria of the resulting closed-loop systems are asymptotically stable, with effectiveness shown via simulation.
Significance. If the regularity assumptions hold and the stability result is rigorous, the work would provide a practical attitude-based method for drag control on complex satellite shapes, extending beyond convex-body approximations common in prior literature. The simultaneous-maneuver extension adds engineering relevance for multi-objective attitude planning.
major comments (2)
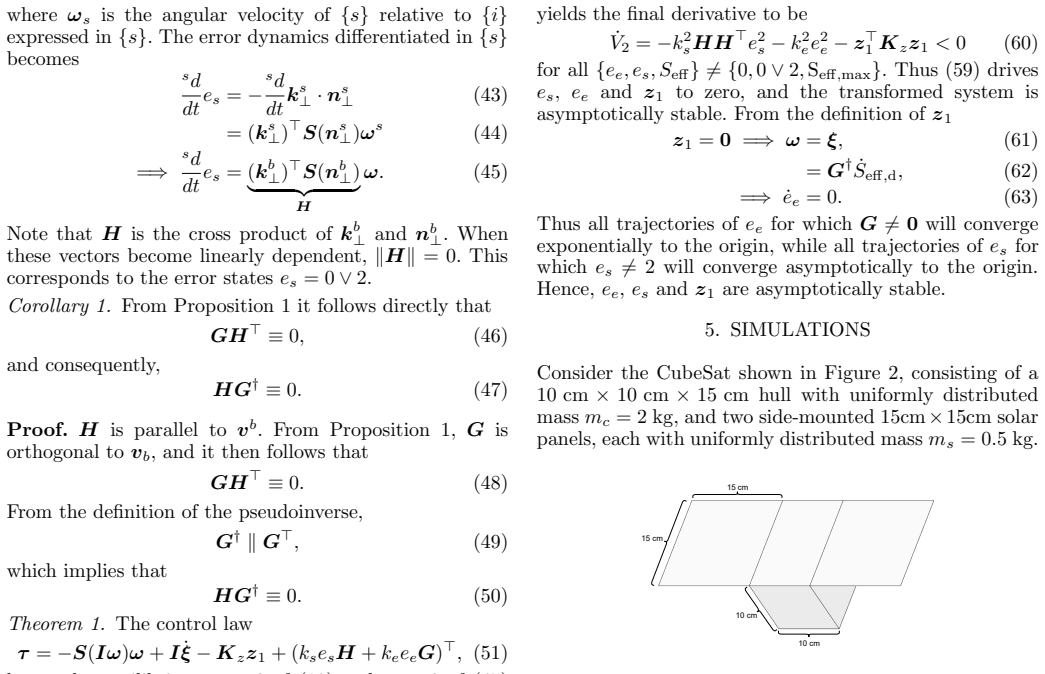
- [Control design and stability analysis sections] The backstepping design (control law and Lyapunov analysis) requires the effective area A(R) and its first two time derivatives to be well-defined and continuous for all R in SO(3). For non-convex geometries the projected area incorporates visibility/occlusion, which can produce points where abla A is discontinuous or undefined; the manuscript provides no proof or regularization that A is C^{1} everywhere, so the virtual controls and stability claim do not hold globally.
- [Introduction and abstract] The abstract and introduction assert asymptotic stability of the closed-loop equilibria, yet the provided text contains no explicit model equations for the rigid-body dynamics, no expression for A(R), and no derivation of the Lyapunov function or its derivative; without these the stability claim cannot be verified.
minor comments (1)
- [Preliminaries] Notation for the effective area function and its dependence on attitude is introduced without a clear preliminary definition or reference to the geometric projection formula.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will incorporate revisions to strengthen the presentation and rigor of the work.
read point-by-point responses
-
Referee: [Control design and stability analysis sections] The backstepping design (control law and Lyapunov analysis) requires the effective area A(R) and its first two time derivatives to be well-defined and continuous for all R in SO(3). For non-convex geometries the projected area incorporates visibility/occlusion, which can produce points where abla A is discontinuous or undefined; the manuscript provides no proof or regularization that A is C^{1} everywhere, so the virtual controls and stability claim do not hold globally.
Authors: We agree this is a substantive point. The manuscript implicitly assumes sufficient smoothness of A(R) for the backstepping controller and Lyapunov analysis to apply globally on SO(3). For general non-convex geometries, visibility and occlusion effects can indeed introduce points of non-differentiability. In the revised manuscript we will add an explicit regularity assumption subsection, introduce a smoothing regularization of the visibility function (e.g., via a small mollifier), and restate the stability result to hold for the regularized A(R). The original control law and Lyapunov function remain valid under this regularization. revision: yes
-
Referee: [Introduction and abstract] The abstract and introduction assert asymptotic stability of the closed-loop equilibria, yet the provided text contains no explicit model equations for the rigid-body dynamics, no expression for A(R), and no derivation of the Lyapunov function or its derivative; without these the stability claim cannot be verified.
Authors: The full manuscript contains the rigid-body attitude dynamics (Section II), the definition of the effective area A(R) via projected visible facets (Section III), and the backstepping Lyapunov analysis with explicit derivative (Section IV). However, to improve verifiability we will expand the derivations in the revised version, adding intermediate steps for ć and the time derivative of the Lyapunov function V so that the asymptotic stability argument is fully self-contained without requiring the reader to fill in details. revision: yes
Circularity Check
No circularity detected
full rationale
The provided abstract and context describe a backstepping-based control design for tracking effective surface area on non-convex satellites, with claims of asymptotic stability for closed-loop equilibria. No equations, parameter-fitting steps, self-citations, or ansatzes are shown that reduce any prediction or result to the inputs by construction. The derivation chain is a standard control synthesis and Lyapunov analysis that does not exhibit self-definitional, fitted-input, or self-citation-load-bearing patterns; it remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
and Neudeker, Heinz , year =
Magnus, Jan R. and Neudeker, Heinz , year =. Matrix
-
[2]
Numerische Mathematik , author =
Preserving monotonicity in the numerical solution of. Numerische Mathematik , author =. 1996 , keywords =. doi:10.1007/s002110050206 , abstract =
-
[3]
Journal of Basic Engineering , author =
New. Journal of Basic Engineering , author =. 1961 , pages =. doi:10.1115/1.3658902 , abstract =
-
[4]
Systems & Control Letters , author =
Robust. Systems & Control Letters , author =. 2021 , keywords =. doi:10.1016/j.sysconle.2021.105034 , abstract =
-
[5]
Quaternion kinematics for the error-state Kalman filter
Solà, Joan , month = nov, year =. Quaternion kinematics for the error-state. doi:10.48550/arXiv.1711.02508 , abstract =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1711.02508
-
[6]
Proceedings of the IEEE , author =
Unscented filtering and nonlinear estimation , volume =. Proceedings of the IEEE , author =. 2004 , note =
2004
-
[7]
Philip and Yamron, Joseph and Kezer, Allen , year =
Whitaker, H. Philip and Yamron, Joseph and Kezer, Allen , year =. Design of model-reference adaptive control systems for aircraft , institution =
-
[8]
Grandmaster level in. Nature , author =. 2019 , note =. doi:10.1038/s41586-019-1724-z , abstract =
-
[9]
Chen, Donghe and Peng, Yubin and Zheng, Tengjie and Wang, Han and Qu, Chaoran and Cheng, Lin , month = feb, year =. Adviser-. doi:10.48550/arXiv.2502.02265 , abstract =
-
[10]
Domain randomization for transferring deep neural networks from simulation to the real world , url =
Tobin, Josh and Fong, Rachel and Ray, Alex and Schneider, Jonas and Zaremba, Wojciech and Abbeel, Pieter , month = sep, year =. Domain randomization for transferring deep neural networks from simulation to the real world , url =. 2017. doi:10.1109/IROS.2017.8202133 , abstract =
-
[11]
Brunton, Steven L and Kutz, J Nathan , year =. Data
-
[12]
Human-level control through deep reinforcement learning , volume =. Nature , author =. 2015 , pages =. doi:10.1038/nature14236 , language =
-
[13]
Proximal Policy Optimization Algorithms
Schulman, John and Wolski, Filip and Dhariwal, Prafulla and Radford, Alec and Klimov, Oleg , month = aug, year =. Proximal. doi:10.48550/arXiv.1707.06347 , abstract =
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1707.06347
-
[14]
and Harmon, Stephanie S
Harmon, Mance E. and Harmon, Stephanie S. , month = jan, year =. Reinforcement
-
[15]
Rudin, Nikita and Hoeller, David and Reist, Philipp and Hutter, Marco , month = aug, year =. Learning to. doi:10.48550/arXiv.2109.11978 , abstract =
-
[16]
Cai, Levi and Chang, Kevin and Girdhar, Yogesh , month = may, year =. Learning to. 2025. doi:10.1109/ICRA55743.2025.11128688 , abstract =
-
[17]
IET Control Theory & Applications , author =
Modified model reference adaptive observer-based control without assumptions on uncertain parameter bounds , volume =. IET Control Theory & Applications , author =. 2024 , keywords =. doi:10.1049/cth2.12597 , abstract =
-
[18]
and Sun, J
Ioannou, P. and Sun, J. , year =. Robust
-
[19]
Differential
Perko, Lawrence , year =. Differential
-
[20]
An error feedback model based adaptive controller for nonlinear systems , url =
Lee, Tea-Gyoo and Huh, Uk-Youl , month = jul, year =. An error feedback model based adaptive controller for nonlinear systems , url =. doi:10.1109/ISIE.1997.648892 , abstract =
-
[21]
On. IEEE Access , author =. 2013 , keywords =. doi:10.1109/ACCESS.2013.2284005 , abstract =
-
[22]
IEEE Transactions on Automatic Control , author =
Mean. IEEE Transactions on Automatic Control , author =. 2018 , keywords =. doi:10.1109/TAC.2018.2830882 , abstract =
-
[23]
and Han, Teawon and Modares, Hamidreza , month = may, year =
Esmzad, Ramin and Sankar, Gokul S. and Han, Teawon and Modares, Hamidreza , month = may, year =. Direct. doi:10.48550/arXiv.2505.06407 , abstract =
-
[24]
SIAM Journal on Control and Optimization , author =
Lyapunov-. SIAM Journal on Control and Optimization , author =. 1995 , note =. doi:10.1137/S0363012993252309 , abstract =
-
[25]
Xue, Chenlong and Zhi, Yongran and An, Binghe and Liu, Lei and Fan, Huijin and Wang, Bo , month = may, year =. Observer-like. 2023 35th. doi:10.1109/CCDC58219.2023.10326798 , abstract =
-
[26]
Khalil, Hassan K. , month = oct, year =. High-gain observers in nonlinear feedback control , url =. 2008. doi:10.1109/ICCAS.2008.4694705 , abstract =
-
[27]
Baltieri, Manuel and Buckley, Christopher L. , month = may, year =. On. doi:10.48550/arXiv.2005.06269 , abstract =
-
[28]
Journal of Dynamic Systems, Measurement, and Control , author =
Kalman. Journal of Dynamic Systems, Measurement, and Control , author =. doi:10.1115/1.4037780 , abstract =
-
[29]
Application of modified. IFAC-PapersOnLine , author =. 2024 , pages =. doi:10.1016/j.ifacol.2024.10.054 , abstract =
-
[30]
Controller and observer design for first order
Ohrem, Sveinung Johan and Holden, Christian , month = oct, year =. Controller and observer design for first order. Proceedings of the 6th. doi:10.1145/3284516.3284517 , abstract =
-
[31]
Satellite
Fanebust, Andreas , year =. Satellite
-
[32]
Kessler, Donald J and Johnson, Nicholas L , year =. The
-
[33]
Johnstone, Alicia , year =
-
[34]
Fossen, T. I. and Perez, T. , year =. Marine
-
[35]
Glaser, P. E. and Maynard, O. E. and Mackovciak, J. J. R. and Ralph, E. I. , month = feb, year =. Feasibility
-
[36]
What are
Bowman, Abagail , year =. What are
-
[37]
Fossen, T.I. and Berge, S.P. , month = dec, year =. Nonlinear vectorial backstepping design for global exponential tracking of marine vessels in the presence of actuator dynamics , volume =. Proceedings of the 36th. doi:10.1109/CDC.1997.649499 , abstract =
-
[38]
SIAM Journal on Numerical Analysis , author =
The. SIAM Journal on Numerical Analysis , author =. 1973 , pages =. doi:10.1137/0710036 , abstract =
-
[39]
IEEE Transactions on Automatic Control , author =. 2013 , pages =. doi:10.1109/TAC.2013.2246900 , abstract =
-
[40]
Liberzon, Daniel , year =. Switching in. doi:10.1007/978-1-4612-0017-8 , keywords =
-
[41]
Computational Geometry , author =
The point in polygon problem for arbitrary polygons , volume =. Computational Geometry , author =. 2001 , keywords =. doi:10.1016/S0925-7721(01)00012-8 , abstract =
-
[42]
IEEE Transactions on Automatic Control , author =
The. IEEE Transactions on Automatic Control , author =. 1991 , pages =
1991
-
[43]
IEEE Transactions on Control Systems Technology , author =
Energy. IEEE Transactions on Control Systems Technology , author =. 2024 , keywords =. doi:10.1109/TCST.2024.3356392 , abstract =
-
[44]
Tensors and
Lim, Lek-Heng , year =. Tensors and. Handbook of
-
[45]
Journal of Guidance, Control, and Dynamics , author =
Collision-. Journal of Guidance, Control, and Dynamics , author =. doi:10.2514/1.G002376 , language =
-
[46]
, year =
Nocedal, Jorge and Wright, Stephen J. , year =. Numerical
-
[47]
IEEE Journal on Robotics and Automation , author =
A unified approach for motion and force control of robot manipulators:. IEEE Journal on Robotics and Automation , author =. 1987 , keywords =. doi:10.1109/JRA.1987.1087068 , abstract =
-
[48]
Modified artificial potential field method for online path planning applications , url =
Bounini, Farid and Gingras, Denis and Pollart, Herve and Gruyer, Dominique , month = jun, year =. Modified artificial potential field method for online path planning applications , url =. 2017. doi:10.1109/IVS.2017.7995717 , abstract =
-
[49]
Journal of Algorithms , author =
Finding the convex hull of a simple polygon , volume =. Journal of Algorithms , author =. 1983 , pages =. doi:10.1016/0196-6774(83)90013-5 , abstract =
-
[50]
Proceedings of the IEEE , author =
The potential of satellite solar power , volume =. Proceedings of the IEEE , author =. 1977 , keywords =. doi:10.1109/PROC.1977.10662 , abstract =
-
[51]
Open Engineering , author =. 2011 , note =. doi:10.2478/s13531-011-0007-8 , abstract =
-
[52]
Cappelletti, Chantal and Robson, Daniel , editor =. Cubesat. 2021 , doi =
2021
-
[53]
Systems & Control Letters , author =
Hybrid attitude tracking of rigid bodies without angular velocity measurement , volume =. Systems & Control Letters , author =. 2012 , keywords =. doi:10.1016/j.sysconle.2012.01.008 , abstract =
-
[54]
IEEE Transactions on Automatic Control , author =
Robust. IEEE Transactions on Automatic Control , author =. 2011 , keywords =. doi:10.1109/TAC.2010.2097351 , abstract =
-
[55]
Systems & Control Letters , author =
Switched nonlinear systems with state-dependent dwell-time , volume =. Systems & Control Letters , author =. 2003 , keywords =. doi:10.1016/S0167-6911(03)00161-0 , abstract =
-
[56]
Journal of Guidance, Control, and Dynamics , author =
Orbital formationkeeping with differential drag , volume =. Journal of Guidance, Control, and Dynamics , author =. 1989 , pages =. doi:10.2514/3.20374 , number =
-
[57]
International Journal of Robust and Nonlinear Control , author =
Satellite. International Journal of Robust and Nonlinear Control , author =. 2025 , keywords =. doi:10.1002/rnc.7755 , abstract =
-
[58]
Systems & Control Letters , author =
A topological obstruction to continuous global stabilization of rotational motion and the unwinding phenomenon , volume =. Systems & Control Letters , author =. 2000 , keywords =. doi:10.1016/S0167-6911(99)00090-0 , abstract =
-
[59]
IEEE Transactions on Automatic Control , author =
Invariance-. IEEE Transactions on Automatic Control , author =. 2019 , keywords =. doi:10.1109/TAC.2018.2838055 , abstract =
-
[60]
IEEE Transactions on Automatic Control , author =
Quaternion-. IEEE Transactions on Automatic Control , author =. 2011 , keywords =. doi:10.1109/TAC.2011.2108490 , abstract =
-
[61]
Uniform semiglobal practical asymptotic stability for non-autonomous cascaded systems and applications , volume =. Automatica , author =. 2008 , keywords =. doi:10.1016/j.automatica.2007.05.019 , abstract =
-
[62]
Uniform practical output-feedback stabilization of spacecraft relative rotation , url =
Kristiansen, Raymond and Loria, Antonio and Chaillet, Antoine and Nicklasson, Per Johan , month = jun, year =. Uniform practical output-feedback stabilization of spacecraft relative rotation , url =. 2008. doi:10.1109/ACC.2008.4587264 , abstract =
-
[63]
and Burkinshaw, Owen , year =
Aliprantis, Charalambos D. and Burkinshaw, Owen , year =. Principles of real analysis , isbn =
-
[64]
Shtessel, Yuri and Edwards, Christopher and Fridman, Leonid and Levant, Arie , year =. Sliding
-
[65]
Attitude
Marshall, Michael A and Goel, Ashish and Pellegrino, Sergio , year =. Attitude
-
[66]
Power from the. Science , author =. 1968 , pages =. doi:10.1126/science.162.3856.857 , language =
-
[67]
and Ruiter, Anton and Komatsu, Y
Yoshihara, Keisuke and Mierlo, Helena and Ng, Alfred and Kumar, B. and Ruiter, Anton and Komatsu, Y. and Horiguchi, H. and Hashimoto, H. , month = aug, year =
-
[68]
Advances in Space Research , author =
Sun-pointing safe control for atmospheric environment monitoring satellite using magnetic actuation , volume =. Advances in Space Research , author =. 2023 , keywords =. doi:10.1016/j.asr.2023.04.044 , abstract =
-
[69]
A fault-tolerant magnetic spin stabilizing controller for the. Acta Astronautica , author =. 2011 , keywords =. doi:10.1016/j.actaastro.2010.07.012 , abstract =
-
[70]
Fusco, Jesse and Swei, Sean Shan-Min and Nakamura, Robert , month = jan, year =. Sun. doi:10.2514/6.2015-2011 , language =
-
[71]
IEEE Transactions on Aerospace and Electronic Systems , author =
Satellite. IEEE Transactions on Aerospace and Electronic Systems , author =. 2024 , note =. doi:10.1109/TAES.2024.3509386 , abstract =
-
[72]
, year =
Kolecki, Joseph C. , year =. An
-
[73]
Journal of Spacecraft and Rockets , author =
Attitude control of a sun-pointing spinning spacecraft by means of solar radiation pressure , volume =. Journal of Spacecraft and Rockets , author =. 1970 , pages =. doi:10.2514/3.29939 , language =
-
[74]
http://www.its.caltech.edu/
-
[75]
Robust optimal sun-pointing control of a large solar power satellite , volume =. Acta Astronautica , author =. 2016 , keywords =. doi:10.1016/j.actaastro.2016.05.019 , abstract =
-
[76]
Backstepping
Fosso, Lauritz , year =. Backstepping
-
[77]
, year =
Kristic, Miroslav and Kanellakopoulos, Ioannis and Kokotovic, Petar V. , year =. Nonlinear and
-
[78]
Nonlinear modelling and control of underwater vehicles , author =
-
[79]
IFAC Proceedings Volumes , author =
On the. IFAC Proceedings Volumes , author =. 2010 , keywords =. doi:10.3182/20100906-3-IT-2019.00035 , abstract =
-
[80]
De Von, D.A. and Fuentes, R.J. and Fausz, J.L. , year =. Passivity-based attitude control for an integrated power and attitude control system using variable speed control moment gyroscopes , isbn =. Proceedings of the 2004. doi:10.23919/ACC.2004.1386705 , abstract =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.