Improved Representation of Matrix Lie Group Operations through Tensor Notation
Pith reviewed 2026-06-27 13:24 UTC · model grok-4.3
The pith
Tensor notation clarifies the derivatives needed for matrix Lie groups in estimation frameworks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors claim that tensors combined with Einstein summation notation provide a novel and clearer way to express and compute the derivatives required when working with matrix Lie groups inside gradient-based estimation algorithms.
What carries the argument
Tensor representation using Einstein summation notation applied to matrix Lie derivatives and group operations.
If this is right
- Derivatives of Lie group operations become more straightforward to derive and implement in estimation code.
- Gradient-based methods for pose estimation or similar problems gain from reduced notational errors.
- Consistency and accuracy improvements from Lie groups can be more readily realized in practice.
- Operations that were previously cumbersome in matrix form are now handled uniformly through index notation.
Where Pith is reading between the lines
- Adoption might reduce implementation bugs in robotics software using Lie groups.
- This could extend to other fields using Lie groups like computer vision or control theory.
- Future work might compare this notation against existing libraries for Lie group computations.
Load-bearing premise
That presenting the operations in tensor and Einstein notation actually improves clarity and reduces errors compared to standard matrix calculus for practitioners.
What would settle it
A side-by-side implementation of the same Lie group estimation problem using both notations, measuring time to derive derivatives correctly and number of errors.
Figures
read the original abstract
Several recent papers have demonstrated the utility of using Lie groups within estimation problems, yielding improved accuracy and consistency. This paper introduces a new tool for describing operations with matrix Lie groups: tensors and the Einstein summation notation. While tensors and Einstein notation are well-known in other research fields, applying this mathematical notation to represent and compute matrix Lie derivatives is novel. More importantly, this new notation greatly clarifies the derivatives and operations necessary to work with matrix Lie Groups in (gradient-based) estimation frameworks. Therefore, the main contribution of this paper is not a new capability, but a more perspicuous mathematical notation for working with matrix Lie groups.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that tensors and Einstein summation notation provide a novel representation for matrix Lie group operations and derivatives; while not introducing new mathematics, this notation is asserted to greatly clarify the computations required for gradient-based estimation frameworks involving Lie groups.
Significance. If the claimed clarity improvement holds and is demonstrated, the notation could reduce derivation errors in robotics and state estimation applications that rely on Lie groups such as SE(3). The contribution is representational rather than theoretical, so its value depends entirely on verifiable perspicuity gains over existing matrix-calculus approaches.
major comments (1)
- Abstract: the load-bearing claim that the notation 'greatly clarifies the derivatives and operations necessary to work with matrix Lie Groups in (gradient-based) estimation frameworks' is unsupported; no side-by-side derivation (e.g., of the differential of f:SE(3)→R or chain rule through the exponential map) is supplied to show reduced cognitive load relative to adjoint-map or left-Jacobian treatments.
minor comments (1)
- Abstract: 'several recent papers' are referenced but not cited, leaving the context for the claimed utility of Lie groups unspecified.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive comment. We address the major comment below and agree that additional material is needed to support the central claim.
read point-by-point responses
-
Referee: [—] Abstract: the load-bearing claim that the notation 'greatly clarifies the derivatives and operations necessary to work with matrix Lie Groups in (gradient-based) estimation frameworks' is unsupported; no side-by-side derivation (e.g., of the differential of f:SE(3)→R or chain rule through the exponential map) is supplied to show reduced cognitive load relative to adjoint-map or left-Jacobian treatments.
Authors: We agree that the abstract's claim would be stronger with explicit side-by-side comparisons. The current manuscript demonstrates the tensor notation through several Lie-group derivations but does not juxtapose them against adjoint or left-Jacobian formulations. In the revision we will insert a new subsection (or appendix) containing direct comparisons for (i) the differential of a scalar function f:SE(3)→R and (ii) the chain rule through the exponential map, written once in tensor/Einstein notation and once in the conventional matrix-calculus style. These examples will be chosen to highlight differences in cognitive load and error-proneness. We will also tone the abstract language to reflect the added supporting material. revision: yes
Circularity Check
No circularity: paper introduces notation without derivation chain or self-referential results
full rationale
The paper's contribution is explicitly a representational tool (tensors + Einstein notation applied to matrix Lie groups) rather than any derived mathematical result, prediction, or fitted quantity. The abstract states the main contribution is 'not a new capability, but a more perspicuous mathematical notation,' with no equations, parameters, or first-principles derivations presented that could reduce to their own inputs. No self-citations, uniqueness theorems, or ansatzes are invoked to support the core claim. The assertion of improved clarity is an authorial judgment about perspicuity, not a result obtained by construction from prior steps within the paper. This is a self-contained notational proposal with no load-bearing circular steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Associating uncertainty with three-dimensional poses for use in estimation problems.IEEE Transactions on Robotics, 30(3):679–693, 2014
Timothy D Barfoot and Paul T Furgale. Associating uncertainty with three-dimensional poses for use in estimation problems.IEEE Transactions on Robotics, 30(3):679–693, 2014
2014
-
[2]
How to put probabilities on homographies.IEEE Transactions on Pattern Analysis and Machine Intelligence, 27(10):1666–1670, 2005
Evgeni Begelfor and Michael Werman. How to put probabilities on homographies.IEEE Transactions on Pattern Analysis and Machine Intelligence, 27(10):1666–1670, 2005
2005
-
[3]
Jos ´e Luis Blanco-Claraco. A tutorial onSE(3)transformation parameterizations and on-manifold optimization.arXiv preprint arXiv:2103.15980, 2021
-
[4]
Associating uncertainty to extended poses for on lie group imu preinte- gration with rotating earth.IEEE Transactions on Robotics, 38(2):998– 1015, 2021
Martin Brossard, Axel Barrau, Paul Chauchat, and Silv `ere Bonnabel. Associating uncertainty to extended poses for on lie group imu preinte- gration with rotating earth.IEEE Transactions on Robotics, 38(2):998– 1015, 2021
2021
-
[5]
Equivariant imu preintegration with biases: A galilean group approach.IEEE Robotics and Automation Letters, 2024
Giulio Delama, Alessandro Fornasier, Robert Mahony, and Stephan Weiss. Equivariant imu preintegration with biases: A galilean group approach.IEEE Robotics and Automation Letters, 2024
2024
-
[6]
Computing map trajectories by repre- senting, propagating and combining pdfs over groups
Drummond and Roussopoulos. Computing map trajectories by repre- senting, propagating and combining pdfs over groups. InProceedings Ninth IEEE International Conference on Computer Vision, pages 1275–
-
[7]
Einsums’s documentation — Einsums 2.0.0-trunk documentation
Einsums Development Team. Einsums’s documentation — Einsums 2.0.0-trunk documentation. https://einsums.github.io/Einsums/, 2026. Accessed: 2026-03-25
2026
-
[8]
On-manifold preintegration for real-time visual–inertial odometry.IEEE Transactions on Robotics, 33(1):1–21, 2016
Christian Forster, Luca Carlone, Frank Dellaert, and Davide Scaramuzza. On-manifold preintegration for real-time visual–inertial odometry.IEEE Transactions on Robotics, 33(1):1–21, 2016
2016
-
[9]
A compact formula for the derivative of a 3-d rotation in exponential coordinates.Journal of Mathematical Imaging and Vision, 51(3):378–384, 2015
Guillermo Gallego and Anthony Yezzi. A compact formula for the derivative of a 3-d rotation in exponential coordinates.Journal of Mathematical Imaging and Vision, 51(3):378–384, 2015
2015
-
[10]
Inte- grating generic sensor fusion algorithms with sound state representations through encapsulation of manifolds.Information Fusion, 14(1):57–77, 2013
Christoph Hertzberg, Ren ´e Wagner, Udo Frese, and Lutz Schr ¨oder. Inte- grating generic sensor fusion algorithms with sound state representations through encapsulation of manifolds.Information Fusion, 14(1):57–77, 2013
2013
-
[11]
On closed-form preintegration for a class of mixed-invariant systems in sen (3).IEEE Control Systems Letters, 2025
Li-Yu Lin, Kartik A Pant, Benjamin Perseghetti, and James Goppert. On closed-form preintegration for a class of mixed-invariant systems in sen (3).IEEE Control Systems Letters, 2025
2025
-
[12]
Characterizing the uncertainty of jointly distributed poses in the lie algebra.IEEE Transactions on Robotics, 36(5):1371–1388, 2020
Joshua G Mangelson, Maani Ghaffari, Ram Vasudevan, and Ryan M Eustice. Characterizing the uncertainty of jointly distributed poses in the lie algebra.IEEE Transactions on Robotics, 36(5):1371–1388, 2020
2020
-
[13]
Exploring so (3) logarithmic map: degenera- cies and derivatives
Zhakshylyk Nurlanov. Exploring so (3) logarithmic map: degenera- cies and derivatives. https://cvg.cit.tum.de/ media/members/demmeln/ nurlanov2021so3log.pdf. Accessed: 2026-02-20
2026
-
[14]
A micro lie theory for state estimation in robotics.arXiv preprint arXiv:1812.01537, 2018
Joan Sola, Jeremie Deray, and Dinesh Atchuthan. A micro lie theory for state estimation in robotics.arXiv preprint arXiv:1812.01537, 2018
-
[15]
Mavis: Multi-camera augmented visual-inertial slam using se 2 (3) based exact imu pre-integration
Yifu Wang, Yonhon Ng, Inkyu Sa, Alvaro Parra, Cristian Rodriguez- Opazo, Taojun Lin, and Hongdong Li. Mavis: Multi-camera augmented visual-inertial slam using se 2 (3) based exact imu pre-integration. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 1694–1700. IEEE, 2024
2024
-
[16]
Analytic combined imu integration (aci 2) for visual inertial navigation
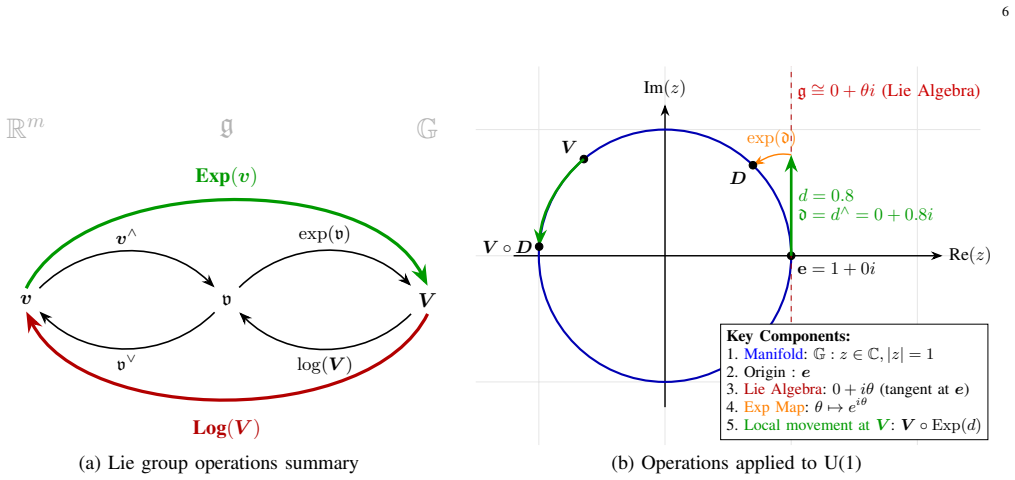
Yulin Yang, Benzun Pious Wisely Babu, Chuchu Chen, Guoquan Huang, and Liu Ren. Analytic combined imu integration (aci 2) for visual inertial navigation. In2020 IEEE International Conference on Robotics and Automation (ICRA), pages 4680–4686. IEEE, 2020. APPENDIX To implement optimization using a matrix Lie group, three functions are required:Exp,Log, and ...
2020
-
[17]
e.g., v∧= skew_symm(v) Basis Tensor (B) Linear Tensor Formulations Linear synthesis and projection operations utilizing basis tensor B
Heuristic∧and∨Operators Ad-hoc, group-dependent vector-to-Lie algebra mappings. e.g., v∧= skew_symm(v) Basis Tensor (B) Linear Tensor Formulations Linear synthesis and projection operations utilizing basis tensor B. (v∧)jk = viBijk and (V∨)i = (P−1)ijBjkl Vkl
-
[18]
Leads to loss of ma- trix structure
Flattened matrix calculus Relies on vectorization (vec) and Kro- necker products (⊗). Leads to loss of ma- trix structure. x = A VBy⇒∂x ∂v = ( (By)T⊗A ) ∂vec(V) ∂v Tensor Calculus Standard Tensor Derivatives Matrix structure is preserved naturally . Higher-level derivatives represented with clean index contractions. ∂xi ∂vj = Aik ∂Vkl ∂vj Blmym
-
[19]
Undefined Log Derivatives Non-surjective Log function yields in- tractable, non-closed-form analytical so- lutions. No analytic representation for ∂Log(V) ∂V Tensor Pseudo-inverse Computable Log Derivatives T ensor pseudo-inverse of Exp leads to fully computable representation: ∂Log(V )i ∂Vjk = (P−1)il ∂Exp(v)jk ∂vl Key Impact for Estimation Frameworks: T...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.