CBF-based Driving Assistance for Traffic Flow Stabilization
Pith reviewed 2026-06-27 08:42 UTC · model grok-4.3
The pith
A hierarchical control system uses control barrier functions to suppress traffic congestion by enforcing vehicle spacing and activating interventions from flow data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors claim that a hierarchical architecture, in which lower-layer controllers apply control-barrier-function logic to maintain safe inter-vehicle spacing and an upper-layer controller activates those lower controllers via a data-driven rule learned from macroscopic flow measurements, reduces congestion in a simulation environment constructed from real-world traffic data.
What carries the argument
The Control Barrier Function, which encodes a safe set for following distance and produces corrective inputs that keep the vehicle state inside that set.
If this is right
- Congestion waves can be damped in mixed human-automated traffic without requiring every vehicle to be controlled.
- The upper layer activates assistance only when flow data indicate risk, limiting unnecessary driver interventions.
- The data-driven activation rule can be retrained for different road segments or traffic patterns.
- The approach separates microscopic safety enforcement from macroscopic decision making.
Where Pith is reading between the lines
- The same two-layer pattern could be tested on other distributed flow problems such as pedestrian or bicycle streams.
- If the upper-layer detector proves robust, it could be used to trigger non-vehicle interventions like variable speed limits.
- Performance may degrade if the real-world sensor data used for training contain large gaps or biases.
- Physical-vehicle trials would be required to check whether human drivers accept the spacing corrections in practice.
Load-bearing premise
The lower-layer controllers can monitor microscopic vehicle behaviors and reliably assist human drivers to maintain sufficient spacing using the control barrier function.
What would settle it
A repeat of the same real-world-data simulation in which the hierarchical system produces no measurable reduction in the length or severity of congestion waves compared with the no-assistance baseline.
Figures


read the original abstract
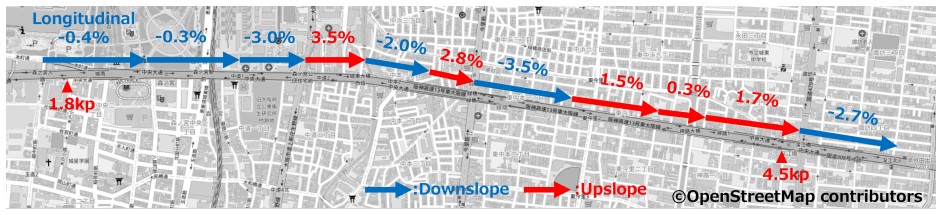
This manuscript addresses a hierarchical control system designed to suppress traffic congestion. The lower-layered controllers, implemented in each controlled vehicle, monitor microscopic vehicle behaviors and assist human drivers to ensure sufficient spacing for following vehicles. This spacing logic is designed based on the Control Barrier Function. Meanwhile, the upper-layered controller monitors the macroscopic traffic flow and activates the necessary lower-layered controllers, using a data-driven approach for the activation logic design. Furthermore, the effectiveness of the proposed control system is evaluated in a traffic flow simulation environment constructed using real-world traffic data.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a hierarchical control architecture for traffic congestion suppression. Lower-layer per-vehicle controllers use Control Barrier Functions (CBF) to monitor microscopic spacing and assist human drivers. An upper-layer controller monitors macroscopic flow and activates the lower-layer controllers via a data-driven activation logic. Effectiveness is claimed via simulation on a traffic-flow environment built from real-world data.
Significance. If the central claims hold, the work would demonstrate a practical hybrid human-assist system that combines formal safety guarantees (CBF) with data-driven activation for macroscopic stabilization. Use of real-world data for the simulation environment is a strength for relevance; however, the absence of any equations, activation-function details, or quantitative error analysis in the supplied text prevents assessment of whether the result is load-bearing or merely illustrative.
major comments (2)
- [Abstract] Abstract (and visible text): the central claim that the hierarchical system 'effectively suppresses traffic congestion' cannot be evaluated because no CBF formulation, no explicit activation logic, no human-driver model, and no quantitative metrics (e.g., flow improvement, string stability, or statistical significance) are provided.
- [Abstract] The weakest assumption flagged by the reader (lower-layer spacing guarantee via CBF) is load-bearing for the whole architecture, yet no equation or proof sketch is visible to confirm that the CBF remains non-conservative under realistic human reaction delays.
minor comments (1)
- [Abstract] The abstract would benefit from one sentence stating the data-driven method (e.g., supervised learning, reinforcement learning) and the performance metric used in the simulation.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below with clarifications from the full manuscript and indicate revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract (and visible text): the central claim that the hierarchical system 'effectively suppresses traffic congestion' cannot be evaluated because no CBF formulation, no explicit activation logic, no human-driver model, and no quantitative metrics (e.g., flow improvement, string stability, or statistical significance) are provided.
Authors: The full manuscript provides the CBF formulation and proof sketch in Section 3, the data-driven activation logic in Section 4, the human-driver model in Section 2, and quantitative metrics (flow improvement, string stability, and statistical results from real-data simulations) in Section 5. The abstract is intentionally concise; we will revise it to include brief references to these elements and key quantitative outcomes. revision: partial
-
Referee: [Abstract] The weakest assumption flagged by the reader (lower-layer spacing guarantee via CBF) is load-bearing for the whole architecture, yet no equation or proof sketch is visible to confirm that the CBF remains non-conservative under realistic human reaction delays.
Authors: Section 3 presents the CBF equations and proof under the modeled human driver dynamics, which incorporate reaction time via the barrier function parameters. The current claims hold under these modeled assumptions. We agree that an explicit sensitivity analysis for varying realistic delays would strengthen the paper and will add a dedicated discussion paragraph on this point in the revision. revision: yes
Circularity Check
No significant circularity identified
full rationale
The provided abstract and context describe a hierarchical CBF controller with a data-driven upper layer for activation, evaluated via simulation on real-world data. No equations, derivation steps, self-citations, or fitted-parameter renamings are visible that would reduce any claimed prediction to its inputs by construction. The central claim rests on external simulation benchmarks rather than internal self-definition or load-bearing self-citation chains. This is the most common honest finding for papers whose key logic is not yet inspectable for reduction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Sustainability , VOLUME =
Paiva, Sara and Pañeda, Xabiel García and Corcoba, Victor and García, Roberto and Morán, Próspero and Pozueco, Laura and Valdés, Marina and del Camino, Covadonga , TITLE =. Sustainability , VOLUME =. 2021 , NUMBER =
2021
-
[2]
A survey of motion planning and control techniques for self-driving urban vehicles , year=
Paden, Brian and Čáp, Michal and Yong, Sze Zheng and Yershov, Dmitry and Frazzoli, Emilio , journal=. A survey of motion planning and control techniques for self-driving urban vehicles , year=
-
[3]
Incorporating human-factors in car-following models: A review of recent developments and research needs , journal =. 2014 , issn =. doi:https://doi.org/10.1016/j.trc.2014.09.008 , author =
-
[4]
2012 , publisher=
Traffic flow dynamics: data, models and simulation , author=. 2012 , publisher=
2012
-
[5]
Microscopic Calibration and Validation of Car-Following Models – A Systematic Approach , journal =. 2013 , note =. doi:https://doi.org/10.1016/j.sbspro.2013.05.050 , author =
-
[6]
Multi-scale model-based hierarchical control of freeway traffic via platoons of connected and automated vehicles , year=
Ferrara, Antonella and Incremona, Gian Paolo and Birliba, Eugeniu and Goatin, Paola , journal=. Multi-scale model-based hierarchical control of freeway traffic via platoons of connected and automated vehicles , year=
-
[7]
Zhao, Chenguang and Yu, Huan and Molnar, Tamas G. , year=. Safety-critical traffic control by connected automated vehicles , volume=. doi:10.1016/j.trc.2023.104230 , journal=
-
[8]
and Coogan, Samuel and Egerstedt, Magnus and Notomista, Gennaro and Sreenath, Koushil and Tabuada, Paulo , booktitle=
Ames, Aaron D. and Coogan, Samuel and Egerstedt, Magnus and Notomista, Gennaro and Sreenath, Koushil and Tabuada, Paulo , booktitle=. Control barrier functions: Theory and applications , year=
-
[9]
New Journal of Physics , abstract =
Sugiyama, Yuki and Fukui, Minoru and Kikuchi, Macoto and Hasebe, Katsuya and Nakayama, Akihiro and Nishinari, Katsuhiro and Tadaki, Shin-ichi and Yukawa, Satoshi , title =. New Journal of Physics , abstract =. doi:10.1088/1367-2630/10/3/033001 , year =
-
[10]
A Cooperative Lane Change Model for Connected and Automated Vehicles , year=
Li, Tingting and Wu, Jianping and Chan, Ching-Yao and Liu, Mingyu and Zhu, Chunli and Lu, Weixin and Hu, Kezhen , journal=. A Cooperative Lane Change Model for Connected and Automated Vehicles , year=
-
[11]
Influence of connected and autonomous vehicles on traffic flow stability and throughput , journal =. 2016 , issn =. doi:https://doi.org/10.1016/j.trc.2016.07.007 , author =
-
[12]
Congested traffic states in empirical observations and microscopic simulations , volume=
Treiber, Martin and Hennecke, Ansgar and Helbing, Dirk , year=. Congested traffic states in empirical observations and microscopic simulations , volume=. Physical Review E , publisher=. doi:10.1103/physreve.62.1805 , number=
work page internal anchor Pith review doi:10.1103/physreve.62.1805
-
[13]
1972 , publisher=
Near miss determination through use of a scale of danger , author=. 1972 , publisher=
1972
-
[14]
Mathematical Programming Computation , volume =
CasADi: a software framework for nonlinear optimization and optimal control , author =. Mathematical Programming Computation , volume =. 2019 , publisher =
2019
-
[15]
Modeling and simulation of the car-truck heterogeneous traffic flow based on a nonlinear car-following model , journal =. 2016 , issn =. doi:https://doi.org/10.1016/j.amc.2015.10.032 , author =
-
[16]
Lp String Stability of Cascaded Systems: Application to Vehicle Platooning , year=
Ploeg, Jeroen and van de Wouw, Nathan and Nijmeijer, Henk , journal=. Lp String Stability of Cascaded Systems: Application to Vehicle Platooning , year=
-
[17]
and Hedrick, J.K
Swaroop, D. and Hedrick, J.K. , booktitle=. String stability of interconnected systems , year=
-
[18]
IEEE Transactions on Intelligent Transportation Systems , year=
Safety-Critical Control of Connected Vehicle Systems Based on Barrier Functions , author=. IEEE Transactions on Intelligent Transportation Systems , year=
-
[19]
Integrating micro and macro traffic control for mixed autonomy traffic , journal =. 2025 , issn =. doi:https://doi.org/10.1016/j.commtr.2025.100188 , author =
-
[20]
Zen traffic data , year =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.