Inferring resource selection and utilization distributions from irregular and error-prone animal tracking data
Pith reviewed 2026-06-27 08:32 UTC · model grok-4.3
The pith
A single state-space model recovers habitat selection coefficients from irregular and error-prone animal tracking data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors embed a habitat-driven Langevin diffusion into a state-space model and apply the Laplace approximation to integrate simultaneously over latent true locations and habitat covariates that depend on those locations, yielding the first TMB implementation that supports such covariate dependence and enabling fast maximum-likelihood inference on resource selection and utilization distributions.
What carries the argument
A state-space formulation of the habitat-driven Langevin diffusion model that uses the Laplace approximation to integrate over latent true locations and paths.
If this is right
- Habitat-selection coefficients remain recoverable under substantial measurement error and missing data.
- Utilization distributions and trajectory reconstructions become more accurate than those from separate filtering and fitting steps.
- The single-stage likelihood propagates uncertainty from location error into the selection estimates.
- The framework extends in principle to telemetry data from any taxa or environment that can be described by the same diffusion process.
Where Pith is reading between the lines
- The method could be adapted to time-varying habitat layers that change faster than the sampling interval.
- Joint estimation of movement and selection parameters may reduce the need for separate preprocessing pipelines in large telemetry datasets.
- Improved coefficient recovery could alter inferred boundaries of protected areas when selection signals are stronger than previously estimated.
Load-bearing premise
The animals' movement follows a habitat-driven Langevin diffusion process and the Laplace approximation accurately integrates over the unknown true locations.
What would settle it
Simulated tracks generated from a movement process that deviates from the assumed diffusion model where the unified estimator shows bias comparable to or larger than the two-step method.
Figures
read the original abstract
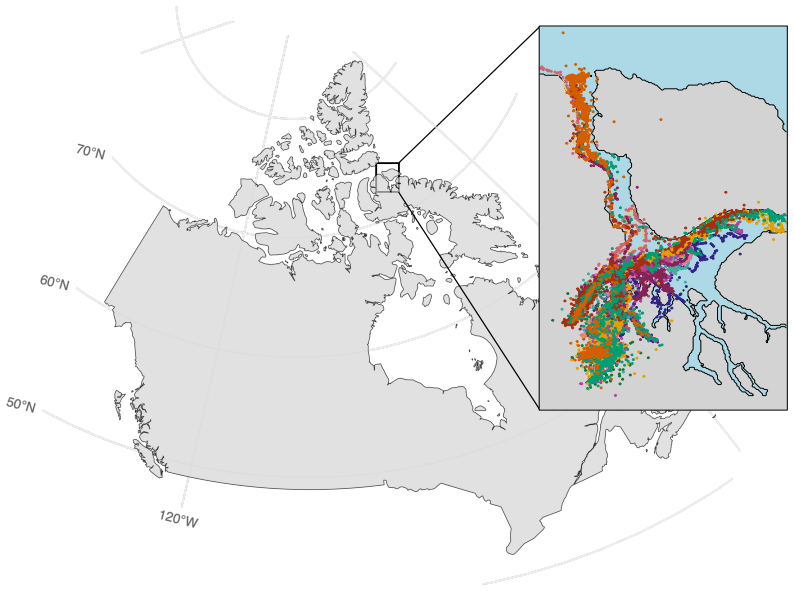
Habitat selection and space use are fundamental to understanding animal distribution. Traditional methods for quantifying habitat preferences from telemetry data assume regular sampling and negligible measurement error. However, these assumptions are routinely violated in marine systems. Practitioners typically regularize and filter the data before fitting models, but these two-step procedures do not propagate uncertainty from the filtering stage and can yield biased estimates. Habitat-driven Langevin diffusion models offer an elegant alternative, naturally accommodating irregular sampling. However, incorporating measurement error via a state-space formulation is challenging because habitat covariates depend on the latent true locations. We address this using the Laplace approximation to simultaneously integrate over true locations and account for habitat covariates along latent paths, yielding a single-stage framework efficiently implemented in Template Model Builder (TMB). By doing so, we provide the first TMB implementation capable of handling covariates that depend on latent variables, allowing inference via fast and efficient maximum likelihood estimation. Simulations show that our approach outperforms the two-step method, recovering habitat-selection parameters even under substantial measurement error and missing data, with more accurate utilization distributions and trajectory reconstructions. Applied to narwhal (Monodon monoceros) telemetry data, the two-step method substantially shrinks the habitat selection coefficient towards zero, while our unified approach recovers a much stronger signal. Our framework offers a computationally efficient solution to long-standing challenges of measurement error and temporal irregularity in habitat selection inference, applicable across a wide range of taxa and environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a state-space formulation of habitat-driven Langevin diffusion models to infer resource selection and utilization distributions from irregular, error-prone telemetry data. It employs the Laplace approximation within TMB to integrate over latent true locations while allowing habitat covariates to depend on the unobserved path, enabling single-stage maximum likelihood estimation. Simulations demonstrate improved recovery of selection parameters relative to two-step regularization/filtering procedures under measurement error and missing observations; application to narwhal telemetry data yields a substantially larger habitat-selection coefficient than the two-step alternative.
Significance. If the central claims hold, the work supplies a computationally practical solution to a persistent problem in movement ecology: propagating location uncertainty into habitat-selection inference without discarding information or introducing bias from ad-hoc preprocessing. The TMB implementation for latent-variable covariates is a technical contribution that could be reused. The simulation recovery results and the narwhal contrast provide concrete evidence of practical improvement, though they rest on the accuracy of the Laplace step.
major comments (2)
- [Simulation study] Simulation study (methods and results sections): recovery of habitat-selection parameters is shown only when the data-generating process exactly matches the fitted habitat-driven Langevin diffusion model. This does not test whether the Laplace approximation introduces bias when the joint posterior over latent trajectories becomes non-Gaussian because of nonlinear habitat functions or high measurement error—the precise setting the state-space formulation is intended to address. A direct comparison to MCMC or higher-order integration in the high-error regimes would be required to support the robustness claim.
- [Narwhal application] Narwhal application (results section): the statement that the unified approach 'recovers a much stronger signal' while the two-step method shrinks the coefficient toward zero is presented without accompanying standard errors, profile likelihoods, or sensitivity checks that would demonstrate the difference is not an artifact of the Laplace approximation or model misspecification. Because this contrast is used to illustrate practical superiority, the quantitative support for the difference needs to be explicit.
minor comments (2)
- [Abstract and Methods] The abstract and methods should cite the original TMB reference and any prior work on Laplace approximations for state-space movement models to clarify the novelty of the latent-covariate extension.
- [Model formulation] Notation for the diffusion parameters and the measurement-error variance should be defined once and used consistently; several symbols appear without explicit definition in the model equations.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We respond to each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Simulation study] Simulation study (methods and results sections): recovery of habitat-selection parameters is shown only when the data-generating process exactly matches the fitted habitat-driven Langevin diffusion model. This does not test whether the Laplace approximation introduces bias when the joint posterior over latent trajectories becomes non-Gaussian because of nonlinear habitat functions or high measurement error—the precise setting the state-space formulation is intended to address. A direct comparison to MCMC or higher-order integration in the high-error regimes would be required to support the robustness claim.
Authors: We agree that the simulation design evaluates parameter recovery when the fitted model matches the data-generating process. This isolates the benefits of single-stage inference relative to two-step procedures under measurement error and irregular sampling, which is the primary practical question addressed by the work. Direct assessment of Laplace approximation error via MCMC in strongly non-Gaussian regimes would require substantial additional computation and is outside the current scope; we will revise the methods and discussion sections to explicitly state this limitation and the scope of the reported robustness results. revision: partial
-
Referee: [Narwhal application] Narwhal application (results section): the statement that the unified approach 'recovers a much stronger signal' while the two-step method shrinks the coefficient toward zero is presented without accompanying standard errors, profile likelihoods, or sensitivity checks that would demonstrate the difference is not an artifact of the Laplace approximation or model misspecification. Because this contrast is used to illustrate practical superiority, the quantitative support for the difference needs to be explicit.
Authors: We agree that the narwhal results would be strengthened by reporting uncertainty measures for the habitat-selection coefficients. We will add the TMB-derived standard errors for both the unified and two-step estimates in the revised results section, allowing readers to assess the magnitude and precision of the difference directly. revision: yes
Circularity Check
No circularity; derivation chain is self-contained via external simulation benchmarks and standard Laplace approximation.
full rationale
The paper develops a state-space model for habitat selection using a habitat-driven Langevin diffusion, integrated via Laplace approximation in TMB to handle latent locations and measurement error. Claims rest on simulations that recover parameters when data are generated from the fitted model (external benchmark) and a narwhal data application showing differing coefficient estimates from the two-step method. No quoted equations or steps reduce by construction to fitted inputs, self-citations, or ansatzes; the method is presented as a computational implementation without load-bearing self-referential definitions or uniqueness theorems imported from the authors' prior work.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Alston, J. M., C. H. Fleming, R. Kays, J. P. Streicher, C. T. Downs, T. Ramesh, B. Reineking, and J. M. Calabrese (2023). Mitigating pseudoreplication and bias in resource selection functions with autocorrelation-informed weighting.Methods in Ecology and Evolution 14(2), 643–654. Anderson, D. J. (1982). The home range: A new nonparametric estimation techn...
2023
-
[2]
Bhattacharyya, A. (1943). On a measure of divergence between two statistical populations defined by their probability distribution.Bulletin of the Calcutta Mathematical Society 35, 99–110. Blackwell, P. G. and J. Matthiopoulos (2024). Joint inference for telemetry and spatial survey data.Ecol- ogy 105(12), e4457. 26 Boyce, M. S. and L. L. McDonald (1999)....
1943
-
[3]
Boitani, R
Cagnacci, F., L. Boitani, R. A. Powell, and M. S. Boyce (2010). Animal ecology meets GPS-based ra- diotelemetry: A perfect storm of opportunities and challenges.Philosophical Transactions of the Royal Society B: Biological Sciences 365(1550), 2157–2162. Calabrese, J. M., C. H. Fleming, and E. Gurarie (2016). ctmm: an R package for analyzing animal reloca-...
2010
-
[4]
Cheng, X., N. S. Chatterji, P. L. Bartlett, and M. I. Jordan (2018). Underdamped langevin MCMC: A non-asymptotic analysis. InConference on learning theory, pp. 300–323. PMLR. Costa, D. P., P. W. Robinson, J. P. Y. Arnould, A.-L. Harrison, S. E. Simmons, J. L. Hassrick, A. J. Hoskins, S. P. Kirkman, H. Oosthuizen, S. Villegas-Amtmann, and D. E. Crocker (20...
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[5]
Forester, J. D., H. K. Im, and P. J. Rathouz (2009). Accounting for animal movement in estimation of resource selection functions: Sampling and data analysis.Ecology 90(12), 3554–3565. Fortin, D., H. L. Beyer, M. S. Boyce, D. W. Smith, T. Duchesne, and J. S. Mao (2005). Wolves influence elk movements: Behavior shapes a trophic cascade in Yellowstone natio...
2009
-
[6]
Freitas, C., E. M. Olsen, H. Knutsen, J. Albretsen, and E. Moland (2016). Temperature-associated habitat selection in a cold-water marine fish.Journal of Animal Ecology 85(3), 628–637. GEBCO Compilation Group (2024). GEBCO 2024 Grid (doi:10.5285/1c44ce99-0a0d-5f4f-e063- 7086abc0ea0f). Halliday, W. D., J. Dawson, D. J. Yurkowski, T. Doniol-Valcroze, S. H. ...
-
[7]
Hebblewhite, M. and E. H. Merrill (2009). Trade-offs between predation risk and forage differ between migrant strategies in a migratory ungulate.Ecology 90(12), 3445–3454. Hooten, M. B., D. S. Johnson, B. T. McClintock, and J. M. Morales (2017).Animal Movement: Statistical models for telemetry data. Boca Raton: CRC press. Hornby, C. A., R. R. Togunov, B. ...
2009
-
[8]
Johnson, D. S., M. B. Hooten, and C. E. Kuhn (2013). Estimating animal resource selection from teleme- try data using point process models.Journal of Animal Ecology 82(6), 1155–1164. Jonsen, I. D., T. A. Patterson, D. P. Costa, P. D. Doherty, B. J. Godley, W. J. Grecian, C. Guinet, X. Hoenner, S. S. Kienle, P. W. Robinson, S. C. Votier, S. Whiting, M. J. ...
2013
-
[9]
Kenyon, K. A., D. J. Yurkowski, J. Orr, D. Barber, and S. H. Ferguson (2018). Baffin Bay narwhal(Mon- odon monoceros)select bathymetry over sea ice during winter.Polar Biology 41(10), 2053–2063. Koslik, J.-O., C. C. Feldmann, S. Mews, R. Michels, and R. Langrock (2025). Inference on the state pro- cess of periodically inhomogeneous hidden Markov models fo...
2018
-
[10]
McClintock, B. T. (2021). Worth the effort? A practical examination of random effects in hidden Markov models for animal telemetry data.Methods in Ecology and Evolution 12(8), 1475–1497. McClintock, B. T. and M. E. Lander (2024). A multistate Langevin diffusion for inferring behavior-specific habitat selection and utilization distributions.Ecology 105(1),...
2021
-
[11]
McWhinnie, L. H., W. D. Halliday, S. J. Insley, C. Hilliard, and R. R. Canessa (2018). Vessel traffic in the Canadian Arctic: Management solutions for minimizing impacts on whales in a changing northern region.Ocean & Coastal Management 160, 1–17. 30 Michelot, T. and P. G. Blackwell (2019). State-switching continuous-time correlated random walks.Meth- ods...
-
[12]
Northrup, J. M., E. Vander Wal, M. Bonar, J. Fieberg, M. P. Laforge, M. Leclerc, C. M. Prokopenko, and B. D. Gerber (2022). Conceptual and methodological advances in habitat-selection modeling: Guidelines for ecology and evolution.Ecological Applications 32(1), e02470. Nunavut Planning Commission (NPC) (2000). North Baffin regional land use plan. Technica...
2022
-
[13]
Tierney, L. and J. B. Kadane (1986). Accurate approximations for posterior moments and marginal densi- ties.Journal of the American Statistical Association 81(393), 82–86. Van der Vaart, A. W. (2000).Asymptotic statistics, Volume
1986
-
[14]
pseudo-absence prob- lem
Cambridge university press. Warton, D. I. and L. C. Shepherd (2010). Poisson point process models solve the “pseudo-absence prob- lem” for presence-only data in ecology.The Annals of Applied Statistics 4(3). Watt, C., J. Orr, and S. Ferguson (2017). Spatial distribution of narwhal (Monodon monoceros) diving for Canadian populations helps identify importan...
2010
-
[15]
McClintock, Jan-Ole Fischer, Marianne Marcoux, Nigel E
33 Appendix S1 Title:Inferring resource selection and utilization distributions from irregular and error-prone animal tracking data Fanny Dupont, Brett T. McClintock, Jan-Ole Fischer, Marianne Marcoux, Nigel E. Hussey, Marie Auger-M´ eth´ e A Mathematical details In this section, we detail the joint negative log-likelihood (i.e., the negative log-integran...
1986
-
[16]
E Additional results Simulation study This section provides additional figures and tables from the simulation study
and the user sup- plies the negative log-integrand−logf p,θ(y,z) as aC++function, and TMB internally computes the mode ˆz(θ), the HessianH(θ), and returns−logL p(θ) along with its gradient with respect toθ. E Additional results Simulation study This section provides additional figures and tables from the simulation study. 36 Figure S1: Histogram of Langev...
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.