Adaptive-Frequency Resonate-and-Fire Neurons for Spectral Estimation of Streaming Radar Signals
Pith reviewed 2026-06-27 04:43 UTC · model grok-4.3
The pith
Adaptive resonate-and-fire neurons estimate FMCW radar target frequencies sample-by-sample with memory scaling only by target count.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
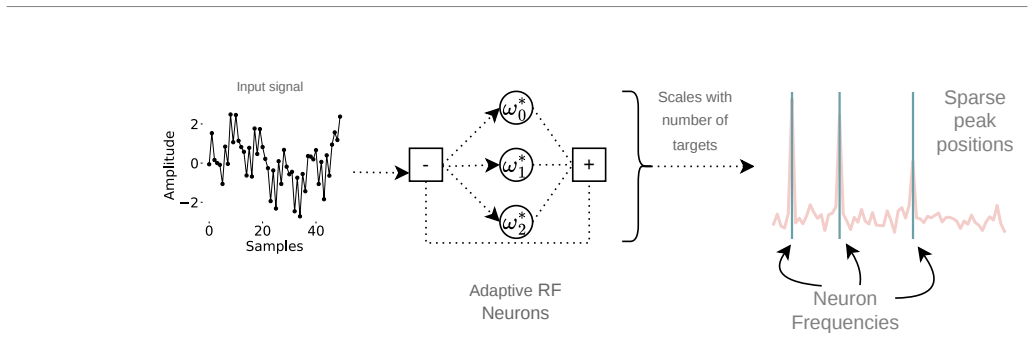
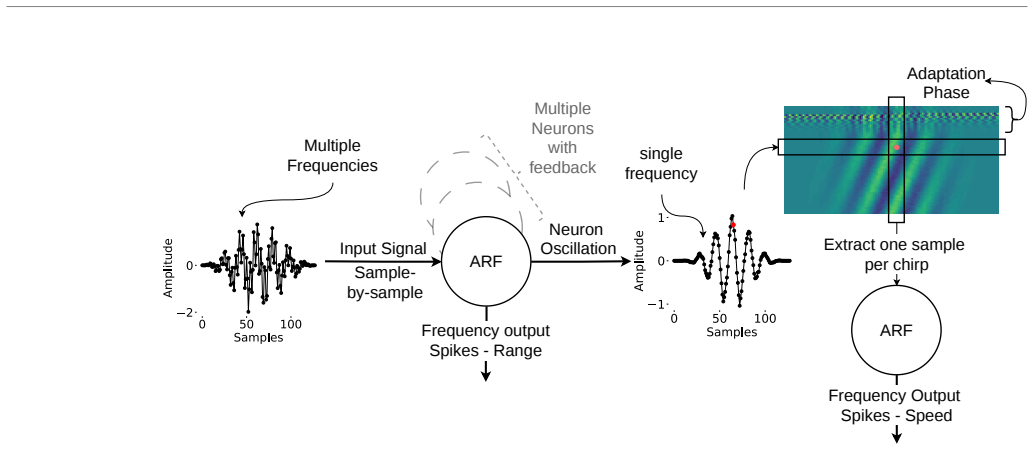
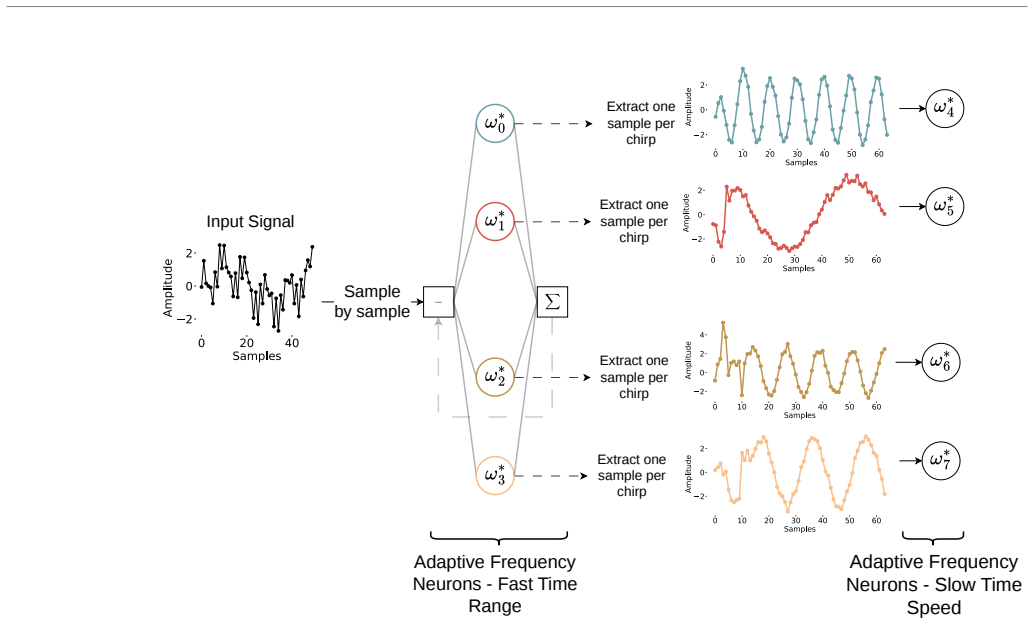
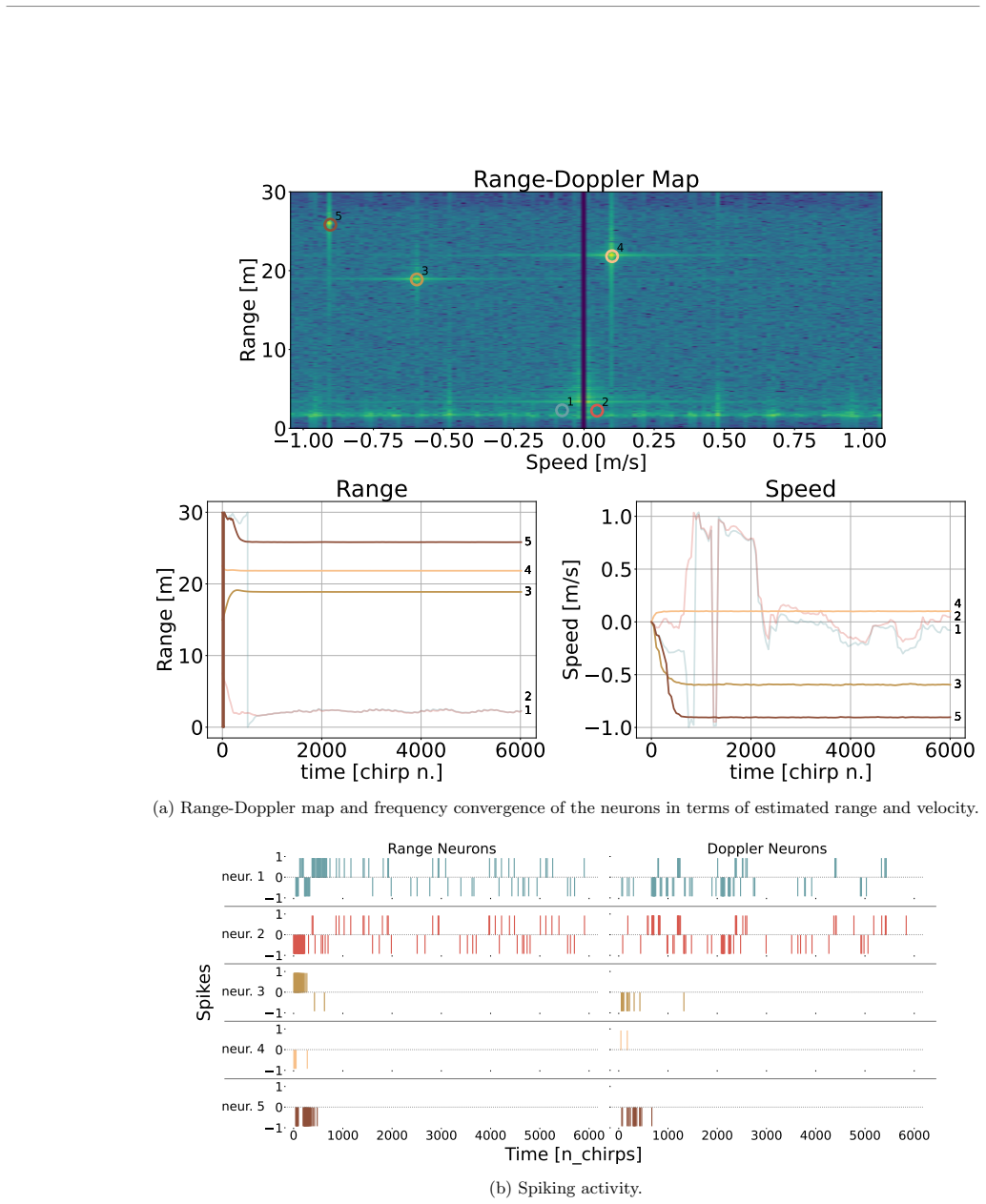
The adaptive-frequency resonate-and-fire neuron, expressed as a discrete-time dynamical system, continuously adjusts its oscillation frequency to the dominant frequency components present in the streaming radar input, thereby directly recovering target range and velocity without first computing a full frequency spectrum. The model processes each sample individually, and an additional feedback mechanism lets multiple neurons converge on distinct frequency components when several targets are present.
What carries the argument
Adaptive-frequency resonate-and-fire (ARF) neurons formulated as a discrete-time dynamical system whose internal frequency is adjusted to lock onto input signal components.
If this is right
- Memory requirements scale with the number of tracked targets rather than signal length.
- A feedback mechanism enables multiple neurons to lock on distinct frequency components.
- The method tracks multiple targets successfully on both simulated and experimental radar data.
- Memory usage becomes proportional only to the number of tracked targets, fitting resource-constrained and edge radar applications.
Where Pith is reading between the lines
- The sample-by-sample operation could map directly onto low-power neuromorphic hardware for continuous radar monitoring.
- The same frequency-locking principle might be tested on other streaming signals such as audio or communications waveforms.
- If the locking remains stable across varying signal-to-noise ratios, latency in multi-target scenes could drop compared with block FFT pipelines.
Load-bearing premise
The introduced feedback mechanism lets multiple neurons lock onto distinct frequencies in multi-target scenes without loss of tracking accuracy or stability.
What would settle it
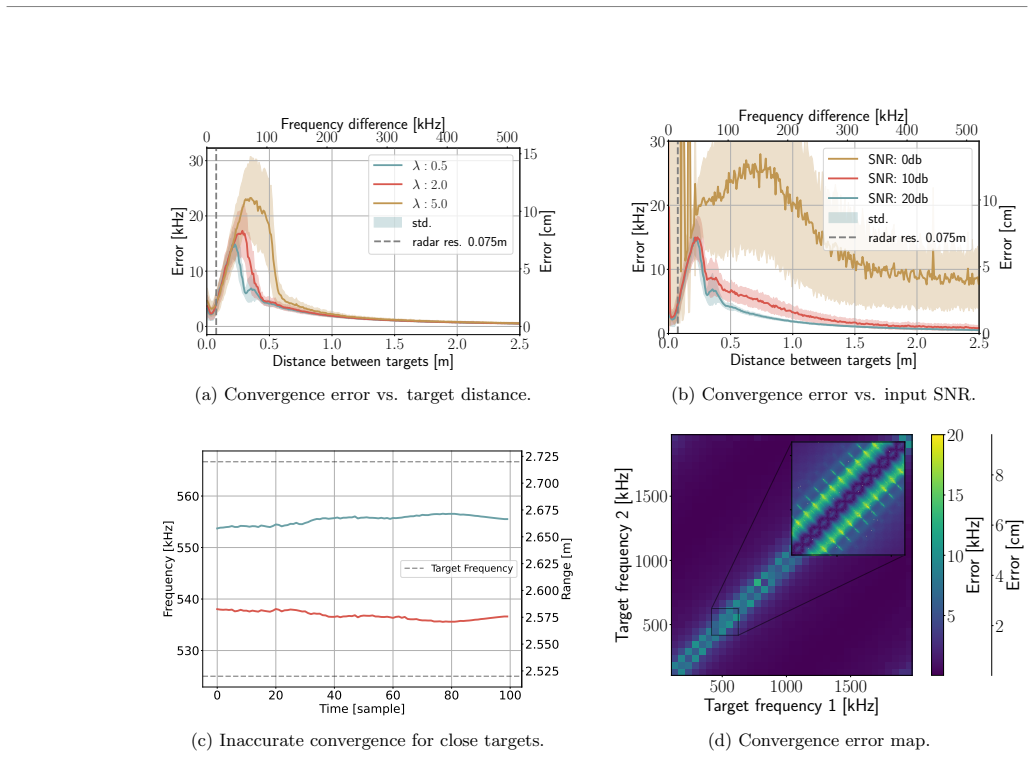
Apply the model to measured multi-target FMCW signals containing two or more closely spaced frequencies and check whether the neurons maintain separate, accurate locks or whether they merge and tracking error rises above that of an FFT reference.
Figures
read the original abstract
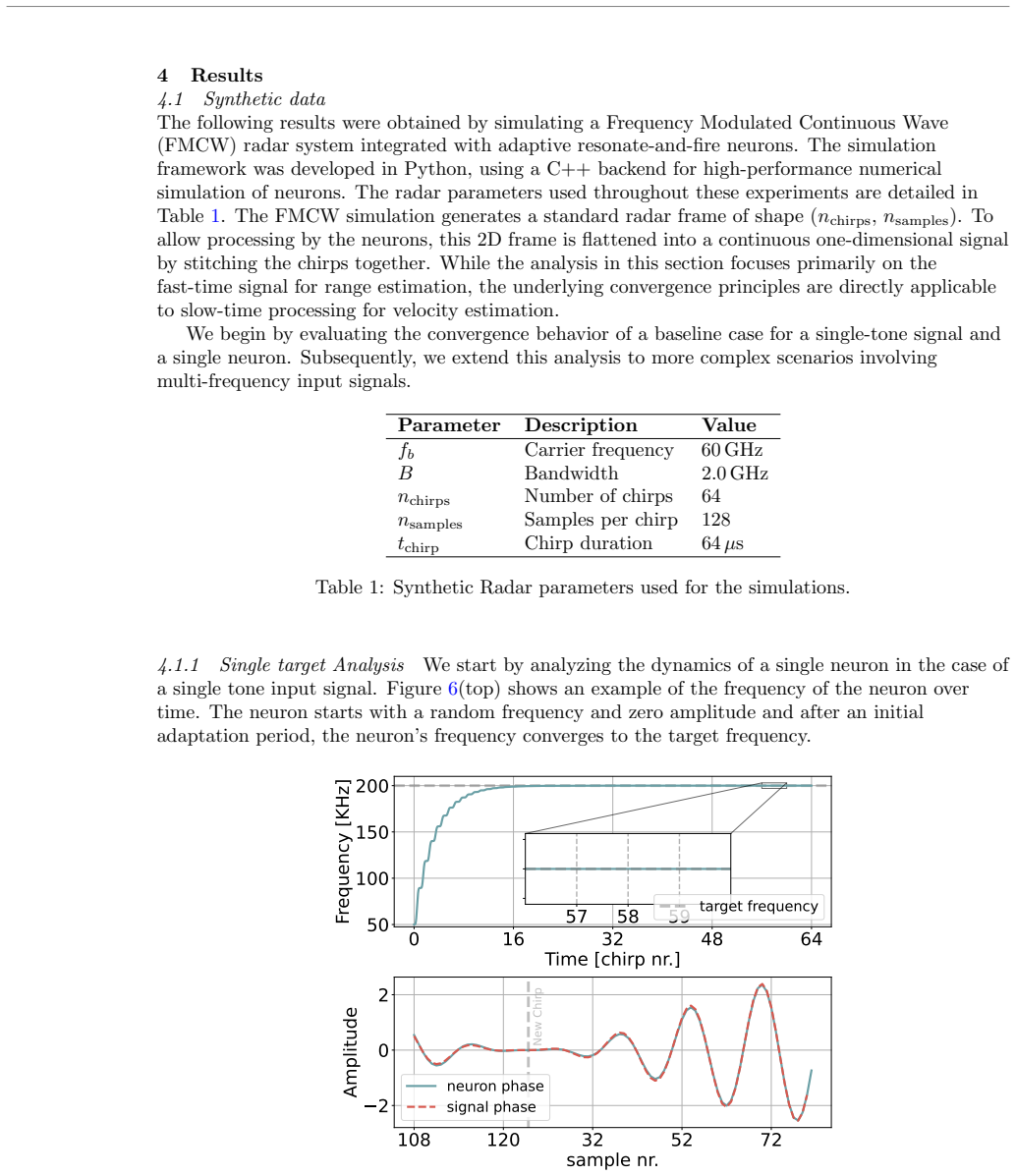
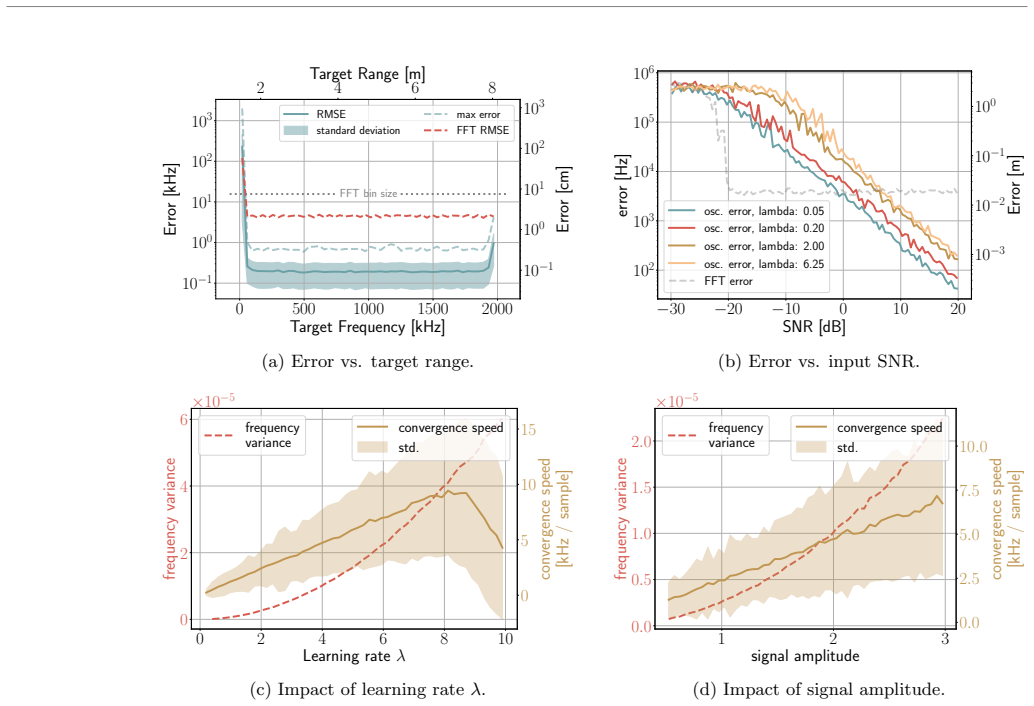
Frequency Modulated Continuous Wave (FMCW) radar systems traditionally rely on Fourier-based methods, such as the Fast Fourier Transform (FFT), to estimate target range and velocity. While computationally efficient, these approaches require storing and processing large blocks of data, which can become a bottleneck in memory-constrained or low-latency applications. In this work, we propose a neuromorphic-inspired signal processing method based on adaptive resonate-and-fire (ARF) neurons formulated as a discrete-time dynamical system. Each neuron dynamically adjusts its internal frequency to match dominant frequency components of the input radar signal, enabling direct estimation of target ranges and velocities without computing the full frequency spectrum. The proposed model operates in a sample-by-sample fashion, resulting in memory requirements that scale with the number of tracked targets rather than the signal length. A feedback mechanism is also introduced to enable multiple neurons to lock on distinct frequency components in multi-target cases. Results on simulated and experimental data demonstrate that the method can successfully track multiple targets. Compared to conventional FFT-based approaches, the proposed method offers reduced memory usage proportional only to the number of tracked targets, making it suitable for resource-constrained and edge-based radar applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes adaptive resonate-and-fire (ARF) neurons, formulated as a discrete-time dynamical system, for spectral estimation in streaming FMCW radar signals. Each neuron adjusts its internal frequency to match dominant components, enabling direct range and velocity estimation without computing the full FFT spectrum. The model operates sample-by-sample with memory scaling proportional to the number of tracked targets rather than signal length; a feedback mechanism is introduced to allow multiple neurons to lock onto distinct frequencies in multi-target scenarios. The abstract asserts successful tracking on simulated and experimental data and reduced memory usage suitable for edge applications.
Significance. If the central claims hold, the work could offer a neuromorphic alternative to block-based FFT methods with substantially lower memory footprint for real-time, resource-constrained radar processing. The sample-by-sample operation and explicit scaling with target count represent a potentially useful conceptual contribution for streaming applications.
major comments (3)
- [Abstract] Abstract: the assertion that 'results on simulated and experimental data demonstrate that the method can successfully track multiple targets' supplies no quantitative error metrics, baseline comparisons to FFT, or details on how the adaptation rule and feedback were validated, leaving the central performance claim without visible supporting evidence.
- [Abstract] Abstract (feedback mechanism description): no stability bounds, Lyapunov analysis, or minimum frequency-separation condition is provided for the coupled neuron system, which is load-bearing for the claim that multiple neurons reliably lock on distinct components without duplication or drift.
- [Abstract] Abstract (memory-scaling claim): the statement that memory 'scales with the number of tracked targets rather than the signal length' rests on the unverified assumption that each ARF neuron maintains fully independent state updated sample-by-sample and that feedback couples them only enough to prevent duplication; no explicit state-update equations or dynamical analysis confirm this independence.
minor comments (1)
- [Abstract] The abstract would benefit from a concise statement of the specific radar parameters (chirp rate, sampling frequency, number of targets) used in the reported experiments.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment point-by-point below, indicating planned revisions where the manuscript will be updated.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that 'results on simulated and experimental data demonstrate that the method can successfully track multiple targets' supplies no quantitative error metrics, baseline comparisons to FFT, or details on how the adaptation rule and feedback were validated, leaving the central performance claim without visible supporting evidence.
Authors: The abstract provides a high-level summary of the claims. The full manuscript contains quantitative error metrics (range/velocity RMSE), direct FFT baseline comparisons, and validation details for the adaptation rule and feedback in Sections 4 (simulations) and 5 (experimental data). To improve visibility of the supporting evidence, we will revise the abstract to include a concise reference to the achieved metrics and comparisons. revision: yes
-
Referee: [Abstract] Abstract (feedback mechanism description): no stability bounds, Lyapunov analysis, or minimum frequency-separation condition is provided for the coupled neuron system, which is load-bearing for the claim that multiple neurons reliably lock on distinct components without duplication or drift.
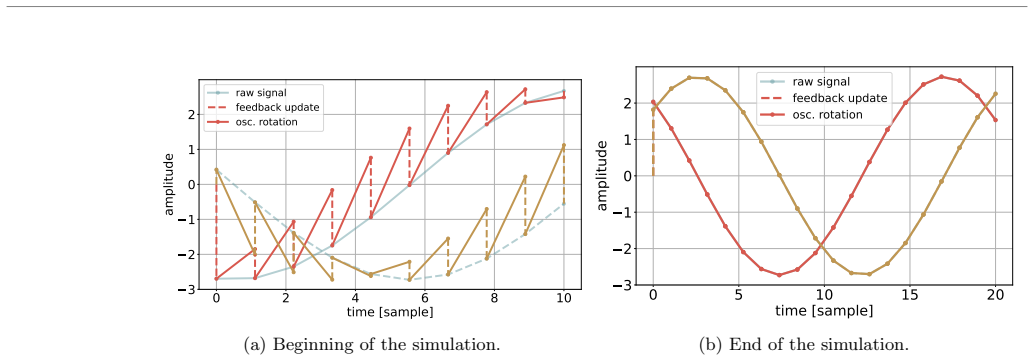
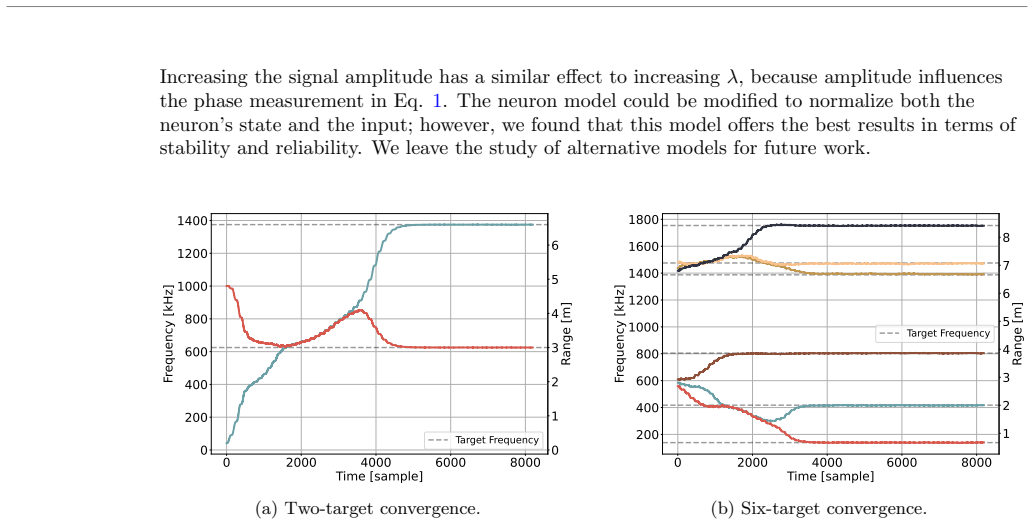
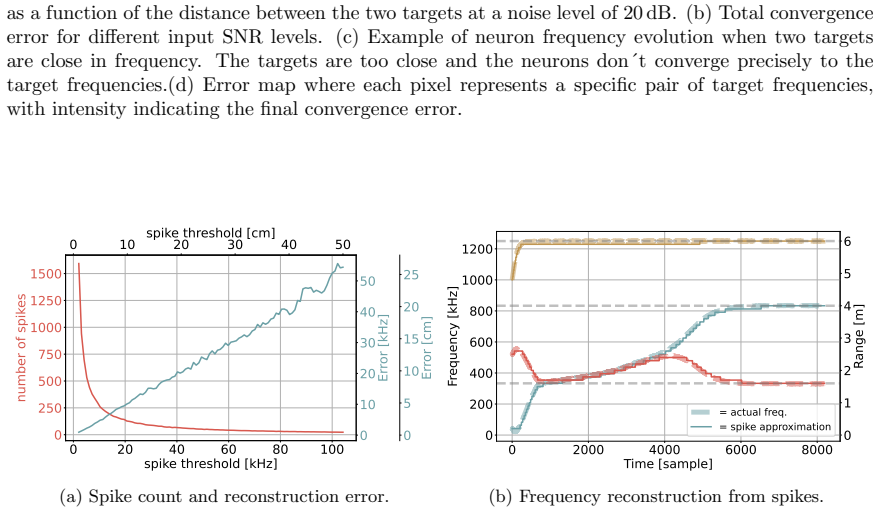
Authors: The feedback mechanism and its empirical behavior are detailed in Section 3 with supporting multi-target simulations. While a full Lyapunov analysis is not included, we provide empirical evidence of stable locking for frequency separations above an observed threshold. We agree a theoretical treatment would be valuable and will add a discussion of the empirical minimum frequency-separation condition and stability observations in the revised manuscript. revision: partial
-
Referee: [Abstract] Abstract (memory-scaling claim): the statement that memory 'scales with the number of tracked targets rather than the signal length' rests on the unverified assumption that each ARF neuron maintains fully independent state updated sample-by-sample and that feedback couples them only enough to prevent duplication; no explicit state-update equations or dynamical analysis confirm this independence.
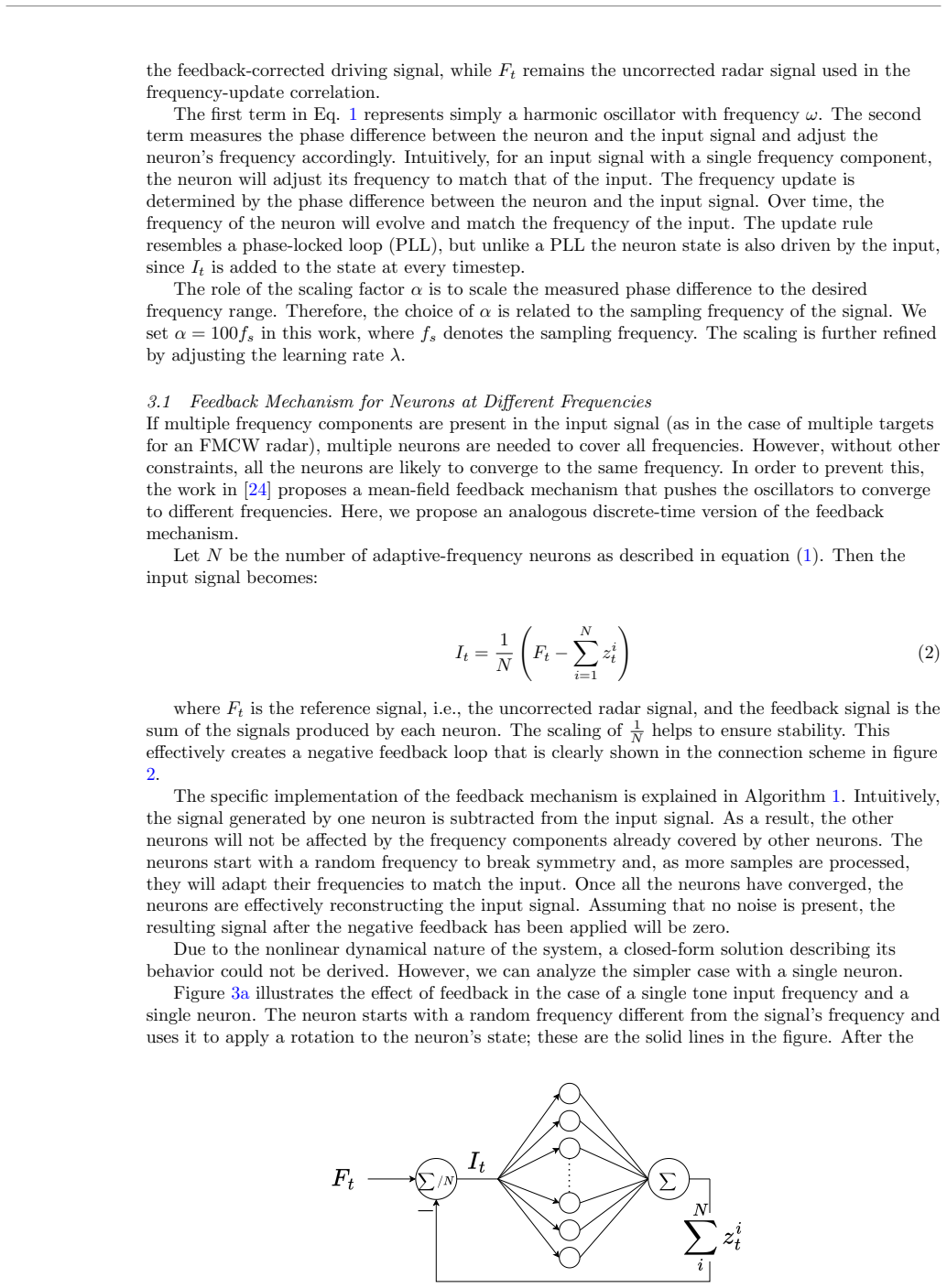
Authors: Explicit per-neuron state-update equations appear in Section 2.1 (Equations 1–4), showing independent frequency, phase, and amplitude states updated sample-by-sample, with feedback acting only as a frequency-adjustment term to avoid duplication. Memory complexity is therefore O(N) for N neurons. We will add an explicit paragraph in Section 2 clarifying state independence and the resulting memory scaling to address the concern. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper introduces a new discrete-time dynamical system for ARF neurons with adaptive frequency and a feedback mechanism. The central claims (sample-by-sample operation, memory scaling with tracked targets rather than signal length, and multi-neuron locking on distinct frequencies) are presented as direct consequences of the proposed formulation and its application to radar signals. No equations, derivations, or self-citations are shown that reduce these claims to fitted parameters, self-definitions, or prior author results by construction. The comparison to FFT is external and falsifiable. This matches the default case of an honest non-finding.
Axiom & Free-Parameter Ledger
invented entities (1)
-
adaptive resonate-and-fire (ARF) neuron
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Perception and sensing for autonomous vehicles under adverse weather conditions: A survey
You Zhang, Alexander Carballo, Hanting Yang, and Kazuya Takeda. “Perception and sensing for autonomous vehicles under adverse weather conditions: A survey”. In:ISPRS Journal of Photogrammetry and Remote Sensing196 (Feb. 2023), pp. 146–177. doi:10.1016/j.isprsjprs.2022.12.021
-
[2]
Automotive Radar Signal Processing: Research Directions and Practical Challenges
Florian Engels, Philipp Heidenreich, Markus Wintermantel, Lukas St¨ acker, Muhammad Al Kadi, and Abdelhak M. Zoubir. “Automotive Radar Signal Processing: Research Directions and Practical Challenges”. In:IEEE Journal of Selected Topics in Signal Processing15.4 (2021), pp. 865–878. doi:10.1109/JSTSP.2021.3063666
-
[3]
1.1 Computing’s energy problem (and what we can do about it)
Mark Horowitz. “1.1 Computing’s energy problem (and what we can do about it)”. In:2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC). Feb. 2014, pp. 10–14.doi:10.1109/ISSCC.2014.6757323
-
[4]
Ordered statistic CFAR technique - an overview
Hermann Rohling. “Ordered statistic CFAR technique - an overview”. In:2011 12th International Radar Symposium (IRS). Sept. 2011, pp. 631–638
2011
-
[5]
Berkin Akin, Peter A. Milder, Franz Franchetti, and James C. Hoe. “Memory Bandwidth Efficient Two-Dimensional Fast Fourier Transform Algorithm and Implementation for Large Problem Sizes”. In:2012 IEEE 20th International Symposium on Field-Programmable Custom Computing Machines. 2012 IEEE 20th International Symposium on Field-Programmable Custom Computing ...
-
[6]
Hw/Sw Co-Design technique for 2D fast fourier transform algorithm on Zynq SoC
Yassin Kortli, Souhir Gabsi, Maher Jridi, Ayman Alfalou, and Mohamed Atri. “Hw/Sw Co-Design technique for 2D fast fourier transform algorithm on Zynq SoC”. In:Integration82 (Jan. 1, 2022), pp. 78–88.doi:10.1016/j.vlsi.2021.09.005
-
[7]
Energy-Efficient Sparse FFT and Compressed Transpose Memory for mmWave FMCW Radar Sensor System
Tourangbam Harishore Singh, Po-Tsang Huang, Kung-Shuo Kao, Chih-Shiang Cheng, Kuei-Ann Wen, and Li-Chun Wang. “Energy-Efficient Sparse FFT and Compressed Transpose Memory for mmWave FMCW Radar Sensor System”. In:IEEE Transactions on Instrumentation and Measurement73 (2024), pp. 1–11. doi:10.1109/TIM.2024.3385823
-
[8]
FourierPIM: High-throughput in-memory Fast Fourier Transform and polynomial multiplication
Orian Leitersdorf, Yahav Boneh, Gonen Gazit, Ronny Ronen, and Shahar Kvatinsky. “FourierPIM: High-throughput in-memory Fast Fourier Transform and polynomial multiplication”. In:Memories - Materials, Devices, Circuits and Systems4 (July 1, 2023), p. 100034. doi:10.1016/j.memori.2023.100034
-
[9]
Advancing Neuromorphic Computing With Loihi: A Survey of Results and Outlook
Mike Davies, Andreas Wild, Garrick Orchard, Yulia Sandamirskaya, Gabriel A. Fonseca Guerra, Prasad Joshi, Philipp Plank, and Sumedh R. Risbud. “Advancing Neuromorphic Computing With Loihi: A Survey of Results and Outlook”. In:Proceedings of the IEEE109.5 (May 2021), pp. 911–934. doi:10.1109/JPROC.2021.3067593
-
[10]
Giacomo Indiveri and Shih-Chii Liu. “Memory and Information Processing in Neuromorphic Systems”. In:Proceedings of the IEEE103.8 (Aug. 2015), pp. 1379–1397. doi:10.1109/JPROC.2015.2444094
-
[11]
Spiking Neural Network for Fourier Transform and Object Detection for Automotive Radar
Javier L´ opez-Randulfe, Tobias Duswald, Zhenshan Bing, and Alois Knoll. “Spiking Neural Network for Fourier Transform and Object Detection for Automotive Radar”. In:Frontiers in Neurorobotics15 (June 7, 2021).doi:10.3389/fnbot.2021.688344
-
[12]
Time-Coded Spiking Fourier Transform in Neuromorphic Hardware
Javier L´ opez-Randulfe, Nico Reeb, Negin Karimi, Chen Liu, Hector A. Gonzalez, Robin Dietrich, Bernhard Vogginger, Christian Mayr, and Alois Knoll. “Time-Coded Spiking Fourier Transform in Neuromorphic Hardware”. In:IEEE Transactions on Computers71.11 (Nov. 2022), pp. 2792–2802. doi:10.1109/TC.2022.3162708
-
[13]
SNN-FT: Temporal-Coded Spiking Neural Networks for Fourier Transform
Shu Wang, Hongzhi Zheng, Yu Chen, Ammar Belatreche, Guoqi Wang, Yi Jin, Jibin Wu, Ming Zhang, Yang Yang, and Hong Li. “SNN-FT: Temporal-Coded Spiking Neural Networks for Fourier Transform”. In:IEEE Transactions on Neural Networks and Learning Systems(2025), pp. 1–13. doi:10.1109/TNNLS.2025.3622893. 18
-
[14]
Low-Latency Spike-Based Range and Velocity Estimation of FMCW Radar Signals
Stefano Chiavazza, Sen Yuan, Francesco Fioranelli, and Federico Corradi. “Low-Latency Spike-Based Range and Velocity Estimation of FMCW Radar Signals”. In:2025 22nd European Radar Conference (EuRAD). 2025 22nd European Radar Conference (EuRAD). Sept. 2025, pp. 335–338. doi:10.23919/EuRAD65285.2025.11234227. [15]Resonate-and-fire neurons - ScienceDirect. u...
-
[15]
Efficient Neuromorphic Signal Processing with Loihi 2
Garrick Orchard, E. Paxon Frady, Daniel Ben Dayan Rubin, Sophia Sanborn, Sumit Bam Shrestha, Friedrich T. Sommer, and Mike Davies. “Efficient Neuromorphic Signal Processing with Loihi 2”. In:2021 IEEE Workshop on Signal Processing Systems (SiPS). 2021 IEEE Workshop on Signal Processing Systems (SiPS). Oct. 2021, pp. 254–259. doi:10.1109/SiPS52927.2021.00053
-
[16]
Resonate-and-Fire Neurons for Radar Interference Detection
Julian Hille, Daniel Auge, Cyprian Grassmann, and Alois Knoll. “Resonate-and-Fire Neurons for Radar Interference Detection”. In:Proceedings of the International Conference on Neuromorphic Systems 2022. ICONS: International Conference on Neuromorphic Systems. Knoxville TN USA: ACM, July 27, 2022, pp. 1–4.doi:10.1145/3546790.3546816
- [17]
-
[18]
NeuroRadar: A Neuromorphic Radar Sensor for Low-Power IoT Systems
Kai Zheng, Kun Qian, Timothy Woodford, and Xinyu Zhang. “NeuroRadar: A Neuromorphic Radar Sensor for Low-Power IoT Systems”. In:Proceedings of the 21st ACM Conference on Embedded Networked Sensor Systems (SenSys). ACM, Nov. 2023, pp. 223–236.doi:10.1145/3625687.3625788
-
[19]
Range and angle estimation with spiking neural resonators for FMCW radar
Nico Reeb, Javier L´ opez-Randulfe, Robin Dietrich, and Alois C. Knoll. “Range and angle estimation with spiking neural resonators for FMCW radar”. In:Neuromorphic Computing and Engineering5.2 (May 2025), p. 024009. doi:10.1088/2634-4386/adcf46
-
[20]
Nico Reeb, Moritz Grabmann, Javier L´ opez-Randulfe, Robin Dietrich, and Alois C. Knoll. “Energy-efficient radar detection with spiking neural resonators via activity-gated sparsity on Intel Loihi 2”. In:Neuromorphic Computing and Engineering(2026). In press. doi:10.1088/2634-4386/ae629d
-
[21]
Neuromorphic computing for radar and radio systems: a survey
Hanna Hamrell, Thomas Sj¨ ogren, and Hannes Ovr´ en. “Neuromorphic computing for radar and radio systems: a survey”. In:Neuromorphic Computing and Engineering6.2 (May 2026), p. 022001. doi:10.1088/2634-4386/ae6369
-
[22]
Dynamic Hebbian learning in adaptive frequency oscillators
Ludovic Righetti, Jonas Buchli, and Auke Jan Ijspeert. “Dynamic Hebbian learning in adaptive frequency oscillators”. In:Physica D: Nonlinear Phenomena216.2 (Apr. 15, 2006), pp. 269–281. doi:10.1016/j.physd.2006.02.009
-
[23]
Frequency analysis with coupled nonlinear oscillators
Jonas Buchli, Ludovic Righetti, and Auke Jan Ijspeert. “Frequency analysis with coupled nonlinear oscillators”. In:Physica D: Nonlinear Phenomena237.13 (Aug. 1, 2008), pp. 1705–1718. doi:10.1016/j.physd.2008.01.014
-
[24]
Simple and Practical Algorithm for Sparse Fourier Transform
Haitham Hassanieh, Piotr Indyk, Dina Katabi, and Eric Price. “Simple and Practical Algorithm for Sparse Fourier Transform”. In:Proceedings of the Twenty-Third Annual ACM-SIAM Symposium on Discrete Algorithms. Proceedings of the Twenty-Third Annual ACM-SIAM Symposium on Discrete Algorithms. Society for Industrial and Applied Mathematics, Jan. 17, 2012, pp....
-
[25]
J. A. Acebr´ on and R. Spigler. “Adaptive Frequency Model for Phase-Frequency Synchronization in Large Populations of Globally Coupled Nonlinear Oscillators”. In:Physical Review Letters81.11 (Sept. 14, 1998), pp. 2229–2232. doi:10.1103/PhysRevLett.81.2229. 19
-
[26]
An adaptive model for synchrony in the firefly Pteroptyx malaccae
B. Ermentrout. “An adaptive model for synchrony in the firefly Pteroptyx malaccae”. In:Journal of Mathematical Biology29.6 (June 1, 1991), pp. 571–585. doi:10.1007/BF00164052
-
[27]
The Duffing adaptive oscillator
Edmon Perkins. “The Duffing adaptive oscillator”. In:Nonlinear Dynamics113.4 (Feb. 1, 2025), pp. 2987–3000. doi:10.1007/s11071-024-10417-0
-
[28]
Jianhua Yang, Litai Lou, Shangyuan Li, Zhongqiu Wang, and Miguel A F Sanju´ an. “Vibrational resonance in coupled self-learning Duffing oscillators and its application in noisy radio frequency signal processing”. In:Physics Letters A571 (Mar. 2026), p. 131311. doi:10.1016/j.physleta.2025.131311
-
[29]
Self-learning physical reservoir computer
Md Raf E Ul Shougat, XiaoFu Li, and Edmon Perkins. “Self-learning physical reservoir computer”. In:Physical Review E109.6 (June 5, 2024), p. 064205.doi:10.1103/PhysRevE.109.064205
-
[30]
On the VLSI Implementation of Adaptive-Frequency Hopf Oscillator
Arash Ahmadi, Eduardo Mangieri, Koushik Maharatna, Srinandan Dasmahapatra, and Mark Zwolinski. “On the VLSI Implementation of Adaptive-Frequency Hopf Oscillator”. In:IEEE Transactions on Circuits and Systems I: Regular Papers58.5 (May 2011), pp. 1076–1088.doi:10.1109/TCSI.2010.2092070
-
[31]
Analog VLSI implementation of resonate-and-fire neuron
Kenji Nakada, Tetsuya Asai, and Hatsuo Hayashi. “Analog VLSI implementation of resonate-and-fire neuron”. In:International Journal of Neural Systems16.6 (Dec. 2006), pp. 445–456. doi:10.1142/S0129065706000846
-
[32]
Direct Signal Encoding With Analog Resonate-and-Fire Neurons
Hannah M. Lehmann, Julian Hille, Cyprian Grassmann, and Vadim Issakov. “Direct Signal Encoding With Analog Resonate-and-Fire Neurons”. In:IEEE Access11 (2023), pp. 50052–50063.doi:10.1109/ACCESS.2023.3278098
-
[33]
A Linear Implementation of an Analog Resonate-and-Fire Neuron
Angqi Liu, Filippo Moro, Sebastian Billaudelle, and Melika Payvand. A Linear Implementation of an Analog Resonate-and-Fire Neuron. Nov. 2025. arXiv:2511.12297.url:https://arxiv.org/abs/2511.12297
Pith/arXiv arXiv 2025
-
[34]
MIMO Radar for Advanced Driver-Assistance Systems and Autonomous Driving: Advantages and Challenges
Shunqiao Sun, Athina P. Petropulu, and H. Vincent Poor. “MIMO Radar for Advanced Driver-Assistance Systems and Autonomous Driving: Advantages and Challenges”. In:IEEE Signal Processing Magazine37.4 (2020), pp. 98–117. doi:10.1109/MSP.2020.2978507
-
[35]
Texas Instruments Inc.Design guide: TIDEP-01012—Imaging radar using cascaded mmWave sensor reference design (REV. A). 2019. url:https://www.ti.com/lit/ug/tiduen5a/tiduen5a.pdf. 20
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.