Tuning Agent-Based Predator-Prey Models Toward Lotka-Volterra Dynamics
Pith reviewed 2026-06-27 04:49 UTC · model grok-4.3
The pith
Environmental and demographic parameters can be tuned so agent-based predator-prey models produce dynamics resembling classical Lotka-Volterra cycles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Environmental and demographic parameters can be optimized with a feature-based loss rewarding sustained oscillations, phase lag, bounded populations, and long-term persistence so that the resulting population time series in an agent-based model with neural-controlled sheep and wolves resemble classical Lotka-Volterra cycles, both for random controllers and for evolved controllers in a more naturalistic setting.
What carries the argument
Feature-based loss function that scores population time series on oscillation sustainability, phase lag, boundedness, and persistence to guide parameter search.
If this is right
- Tuned agent-based models can serve as microscopic realizations of the Lotka-Volterra equations for studying emergence of cycles from local rules.
- The same parameter-tuning procedure can be applied to other agent-based systems to recover known macroscopic dynamics.
- Efficient batched simulation on accelerators makes exhaustive search over environmental and demographic parameters practical.
- The method works for both random and evolved neural controllers, indicating robustness across controller types.
Where Pith is reading between the lines
- If the tuned models also match Lotka-Volterra responses to parameter perturbations or external shocks, the resemblance would be stronger than surface statistics alone.
- The approach could be used to diagnose when an agent-based model has entered regimes that cannot be captured by simple differential equations.
- Similar loss-driven tuning might help stabilize other multi-agent simulations that currently exhibit collapse or saturation.
Load-bearing premise
The chosen features in the loss function measure genuine dynamical resemblance rather than allowing the optimizer to discover superficial statistical matches that do not reflect the underlying cycle structure.
What would settle it
After optimization, simulate the agent-based model for many generations and verify whether the predator and prey population peaks maintain a consistent phase lag of roughly one quarter cycle while remaining bounded and non-collapsing.
Figures
read the original abstract
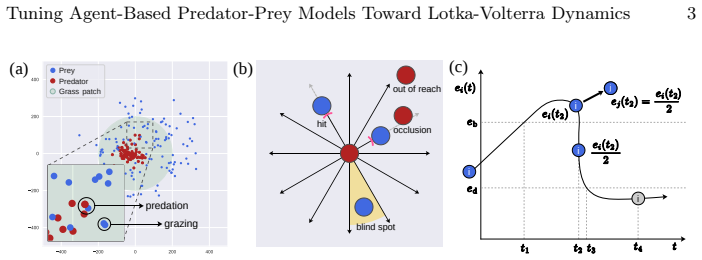
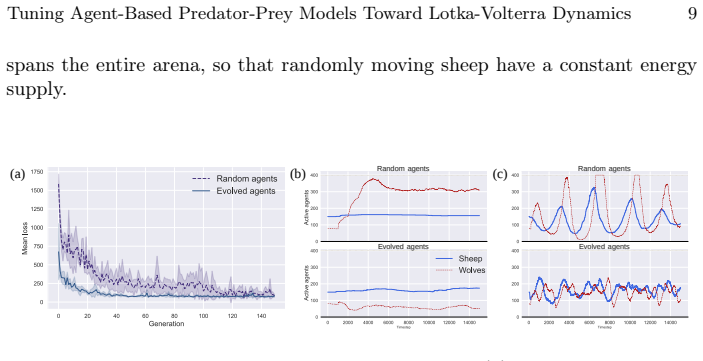
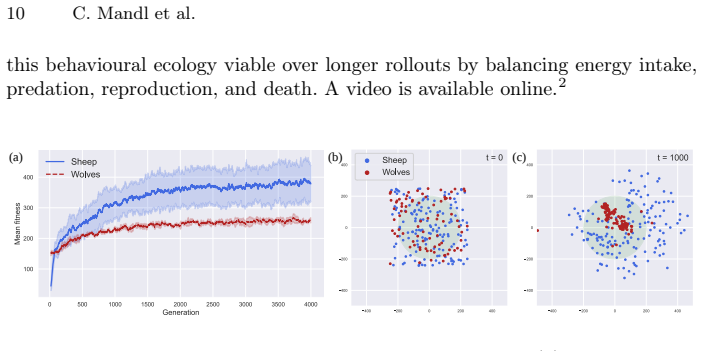
Recent growth in compute power has made it increasingly feasible to use large-scale agent-based models to simulate complex adaptive systems. A central difficulty is that such models contain many local rules and parameters, where small changes can lead to runaway behaviour, population collapse, or saturation at artificial bounds. We study this problem in a continuous predator-prey system where sheep and wolves are active agents with local sensing, internal energy, and recurrent neural network-based controllers. We ask whether environmental and demographic parameters can be tuned so that the resulting population dynamics resemble classical Lotka-Volterra cycles. We optimise these parameters with a feature-based loss that rewards sustained oscillations, phase lag, bounded populations, and long-term persistence, first for random controllers and then for evolved controllers in a more naturalistic setting. The model is implemented in ABMax, a JAX-based agent-based modelling framework that enables efficient batched simulation on hardware accelerators.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies an agent-based predator-prey model (sheep and wolves as agents with local sensing, internal energy, and RNN controllers) implemented in the JAX-based ABMax framework. It claims that environmental and demographic parameters can be tuned, via a feature-based loss rewarding sustained oscillations, ~90° phase lag, bounded populations, and long-term persistence, to produce population dynamics resembling classical Lotka-Volterra cycles; the optimization is performed first on random controllers and then on evolved controllers in a more naturalistic setting.
Significance. If the tuned trajectories are shown to approximately obey the LV vector field (rather than merely matching generic oscillation statistics), the work would offer a practical calibration method for complex ABMs to match known analytical models, improving their reliability for studying adaptive systems. The efficient batched simulation on accelerators is a clear technical strength.
major comments (2)
- [Abstract / loss definition] The feature-based loss (defined on four scalar statistics: sustained oscillations, phase lag, boundedness, persistence) is necessary but not sufficient to establish resemblance to Lotka-Volterra dynamics. Any stable limit cycle with appropriate lag can score highly; the manuscript must include post-hoc verification that the resulting trajectories approximately satisfy the LV ODEs or exhibit the conserved quantity, otherwise the central claim rests on superficial matches.
- [Abstract] No quantitative results, error bars, or validation metrics are reported in the abstract, and the full text provides no indication of whether the optimization was run with multiple random seeds or whether the reported resemblance survives out-of-sample parameter perturbations. This leaves open the possibility of post-hoc selection.
minor comments (2)
- Clarify the exact mathematical definition of the four loss terms and the relative weighting used during optimization.
- Specify the architecture and training details of the RNN controllers (number of hidden units, initialization, etc.) so that the distinction between random and evolved controllers is reproducible.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important ways to strengthen the central claim of resemblance to Lotka-Volterra dynamics and to improve reporting standards. We respond to each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Abstract / loss definition] The feature-based loss (defined on four scalar statistics: sustained oscillations, phase lag, boundedness, persistence) is necessary but not sufficient to establish resemblance to Lotka-Volterra dynamics. Any stable limit cycle with appropriate lag can score highly; the manuscript must include post-hoc verification that the resulting trajectories approximately satisfy the LV ODEs or exhibit the conserved quantity, otherwise the central claim rests on superficial matches.
Authors: We agree that the feature-based loss targets statistical signatures rather than directly enforcing the Lotka-Volterra ODE structure, and that other limit cycles could achieve high scores. The ~90° phase lag and sustained bounded oscillations are core LV signatures, but this does not substitute for explicit verification. In the revised manuscript we will add post-hoc analysis on the optimized trajectories, including checks against the LV vector field and approximate conservation of the quantity V = x − ln(x) + y − ln(y), to demonstrate that the resemblance is not merely superficial. revision: yes
-
Referee: [Abstract] No quantitative results, error bars, or validation metrics are reported in the abstract, and the full text provides no indication of whether the optimization was run with multiple random seeds or whether the reported resemblance survives out-of-sample parameter perturbations. This leaves open the possibility of post-hoc selection.
Authors: We accept that the abstract should report quantitative outcomes and that robustness details belong in the main text. In revision we will update the abstract with key performance metrics (e.g., achieved loss values and population statistics) together with variability measures. We will also add explicit reporting of results across multiple random seeds for the optimization procedure and include an out-of-sample perturbation test to address selection concerns. revision: yes
Circularity Check
No significant circularity; optimization matches independent features by design but claims no tautological derivation
full rationale
The paper describes an empirical optimization procedure using a feature-based loss on oscillations, phase lag, boundedness and persistence to tune ABM parameters toward LV-like statistics. These features are defined externally to the LV equations themselves and serve as an optimization target rather than a self-referential derivation. No equations, self-citations, or uniqueness theorems are presented in the available text that would reduce a claimed result to its own inputs by construction. The central result is simply that the optimizer can achieve the specified feature targets; this does not constitute a first-principles derivation that collapses into the loss definition.
Axiom & Free-Parameter Ledger
free parameters (1)
- environmental and demographic parameters
axioms (1)
- domain assumption The feature-based loss captures the essential properties of Lotka-Volterra dynamics.
Reference graph
Works this paper leans on
-
[1]
http://github.com/jax-ml/jax (2018)
Bradbury, J., Frostig, R., Hawkins, P., Johnson, M.J., Leary, C., Maclau- rin, D., Necula, G., Paszke, A., VanderPlas, J., Wanderman-Milne, S., Zhang, Q.: Jax: Composable transformations of python+numpy programs. http://github.com/jax-ml/jax (2018)
2018
-
[2]
Chaturvedi, S., El-Gazzar, A., van Gerven, M.: Abmax: A jax-based agent- based modeling framework (2025)
2025
-
[3]
ArXiv preprint arXiv:2510.18886 (2025)
Chaturvedi, S., El-Gazzar, A., van Gerven, M.: Emergence of internal state- modulated swarming in multi-agent patch foraging system. ArXiv preprint arXiv:2510.18886 (2025)
Pith/arXiv arXiv 2025
-
[4]
ArXiv preprint arXiv:2604.00810 (2026)
Chaturvedi, S., El-Gazzar, A., van Gerven, M.: Role differentiation in a coupled resource ecology under multi-level selection. ArXiv preprint arXiv:2604.00810 (2026)
arXiv 2026
-
[5]
Clauset, A., Shalizi, C.R., Newman, M.E.J.: Power-law distribu- tions in empirical data. SIAM Review51(4), 661–703 (2009). https://doi.org/10.1137/070710111
-
[6]
Annual Review Of Ecology, Evolution, And Systematics36, 147–168 (2005)
DeAngelis, D.L., Mooij, W.M.: Individual-based modeling of ecological and evolutionary processes. Annual Review Of Ecology, Evolution, And Systematics36, 147–168 (2005). https://doi.org/10.1146/annurev.ecolsys.36.102003.152644
-
[7]
Crc Press (2004)
Ericson, C.: Real-Time Collision Detection. Crc Press (2004)
2004
-
[8]
ArXiv preprint arXiv:1604.00772 (2016) 12 C
Hansen, N.: The cma evolution strategy: A tutorial. ArXiv preprint arXiv:1604.00772 (2016) 12 C. Mandl et al
Pith/arXiv arXiv 2016
-
[9]
In: Social self-organization: Agent- based simulations and experiments to study emergent social behavior, pp
Helbing, D.: Agent-based modeling. In: Social self-organization: Agent- based simulations and experiments to study emergent social behavior, pp. 25–70. Springer (2012)
2012
-
[10]
Periodicals Of Engineering And Natural Sciences4(1), 44–50 (2016)
Hodzic, M., Selman, S., Hadzikadic, M.: Complex ecological system model- ing. Periodicals Of Engineering And Natural Sciences4(1), 44–50 (2016). https://doi.org/10.21533/pen.v4i1.9
-
[11]
Daedalus121(1), 17–30 (1992)
Holland, J.H.: Complex adaptive systems. Daedalus121(1), 17–30 (1992)
1992
-
[12]
Idema, T.: The Behaviour and Attractiveness of the Lotka-Volterra Equa- tions. Ph.D. thesis, Universiteit Leiden (2005)
2005
-
[13]
In: Proceedings of the Companion Conference On Genetic And Evolutionary Computation
Lange, R.T.: Evosax: Jax-based evolution strategies. In: Proceedings of the Companion Conference On Genetic And Evolutionary Computation. pp. 659–662
-
[14]
The American Statistician42(1), 59–66 (1988)
Lee Rodgers, J., Nicewander, W.A.: Thirteen ways to look at the correlation coefficient. The American Statistician42(1), 59–66 (1988)
1988
-
[15]
Scientific Reports13, 9268 (2023)
Monti, C., Pangallo, M., De Francisci Morales, G., Bonchi, F.: On learn- ing agent-based models from data. Scientific Reports13, 9268 (2023). https://doi.org/10.1038/s41598-023-35536-3
-
[16]
Mühlbauer, L.K., Schulze, A.D., Harpole, W.S., Clark, A.T.: gauser: Sim- ple methods for fitting Lotka-Volterra models describing Gause’s “strug- gle for existence”. Ecology And Evolution10(24), 13275–13283 (2020). https://doi.org/10.1002/ece3.6926
-
[17]
PLOS ONE16(5), e0250970 (2021)
Niemann, J.H., Klus, S., Schütte, C.: Data-driven model reduction of agent- based systems using the koopman generator. PLOS ONE16(5), e0250970 (2021). https://doi.org/10.1371/journal.pone.0250970
-
[18]
Scientific Reports16, 10342 (2026)
Quan, Q., Yu, X., Li, Y., Qi, G.: Macroscopic modelling and analysis based on microscopic models for swarm systems. Scientific Reports16, 10342 (2026). https://doi.org/10.1038/s41598-026-38163-w
-
[19]
Philosophy Of Science84(2), 209–229 (2017)
Räz, T.: The volterra principle generalized. Philosophy Of Science84(2), 209–229 (2017). https://doi.org/10.1086/690717
-
[20]
Current Opinion In Neurobiology25, 156–163 (2014)
Sussillo, D.: Neural circuits as computational dynamical systems. Current Opinion In Neurobiology25, 156–163 (2014)
2014
-
[21]
Volterra, V.: Fluctuations in the abundance of a species con- sidered mathematically. Nature118(2972), 558–560 (1926). https://doi.org/10.1038/118558a0
-
[22]
Annual Review Of Ecology And Systematics9, 189–218 (1978)
Wangersky, P.J.: Lotka-Volterra population models. Annual Review Of Ecology And Systematics9, 189–218 (1978). https://doi.org/10.1146/annurev.es.09.110178.001201
-
[23]
Wilensky, U.: Netlogo wolf sheep predation model (1997), http://ccl.northwestern.edu/netlogo/models/WolfSheepPredation
1997
-
[24]
Computer Sciences & Mathematics Forum 7(1), 50 (2023)
Yaya, Y.Y.: A predator–prey model from a collective dynamics and self- propelled particles approach. Computer Sciences & Mathematics Forum 7(1), 50 (2023). https://doi.org/10.3390/iocma2023-14375
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.