Transferring Contact, Not Just Motion: Compliant Grasping Across Dexterous Hands
Pith reviewed 2026-06-27 04:41 UTC · model grok-4.3
The pith
Calibrated contact feedback lets grasping policies transfer across structurally different dexterous hands.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
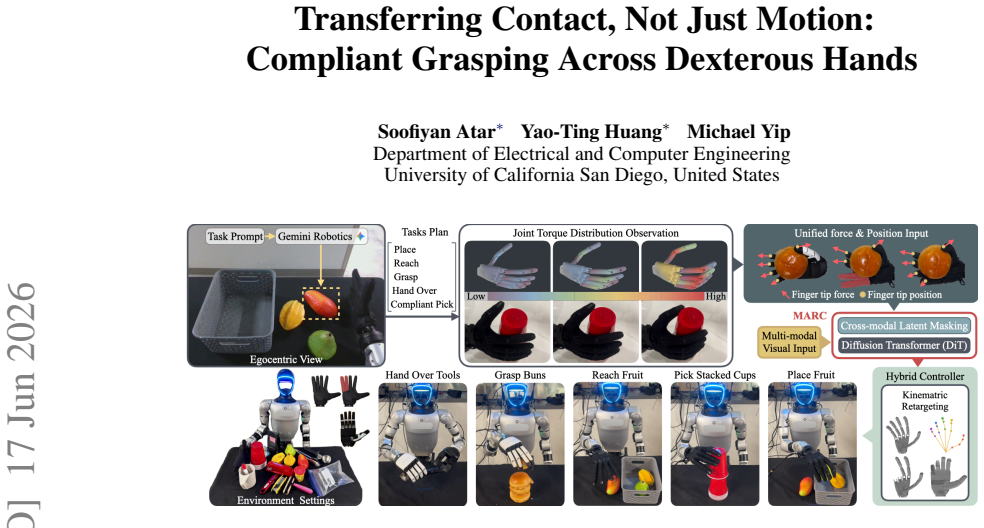
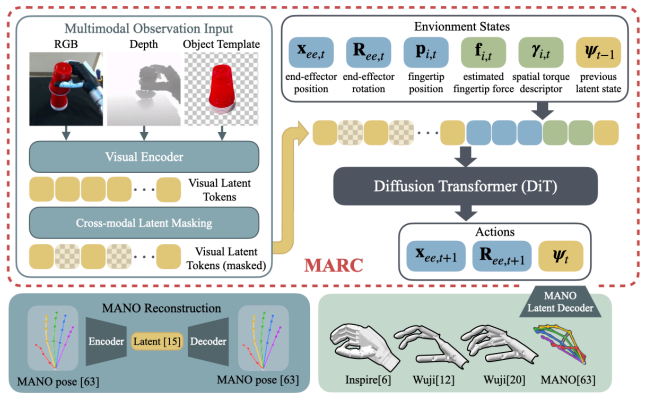
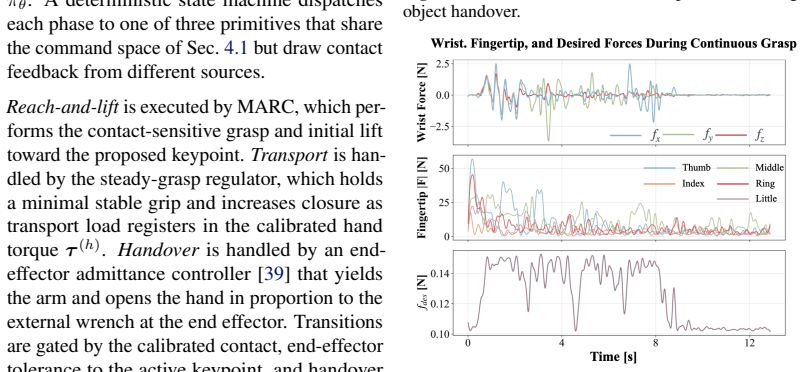
A cross-embodiment force-position interface represents motion in a shared latent while mapping each hand's effort to comparable physical torques in N.m, fingertip forces, and compact load descriptors; a flow-matching policy trained on vision plus these signals, with structured masking, produces transferable compliant grasping that reuses primitives in extended manipulation sequences.
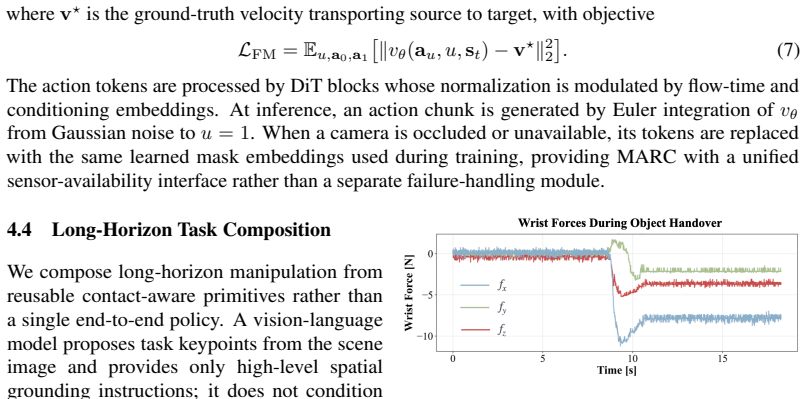
What carries the argument
The cross-embodiment force-position interface that converts raw effort signals into interchangeable fingertip forces and per-finger load descriptors via system identification.
If this is right
- Compliant grasping policies trained on one hand apply directly to structurally different hands.
- Learned primitives integrate into longer manipulation sequences without additional hand-specific training.
- Visual masking during training increases policy dependence on calibrated force feedback when vision is unreliable.
- The hybrid controller keeps force targets consistent between demonstration collection and policy execution.
Where Pith is reading between the lines
- The calibration step could be extended to other sensor types to broaden cross-embodiment transfer beyond force.
- Testing the same interface on hands with larger kinematic differences would reveal the limits of the load-descriptor representation.
- If the per-finger descriptors prove sufficient, similar compact representations might simplify transfer for non-grasping contact tasks such as in-hand rotation.
Load-bearing premise
System identification can produce effort-to-torque mappings that yield comparable fingertip forces and per-finger load descriptors across heterogeneous hands.
What would settle it
A direct comparison on two different hands where the same policy succeeds with calibration but fails to maintain stable grasps when the calibration step is removed and raw effort signals are used instead.
Figures
read the original abstract
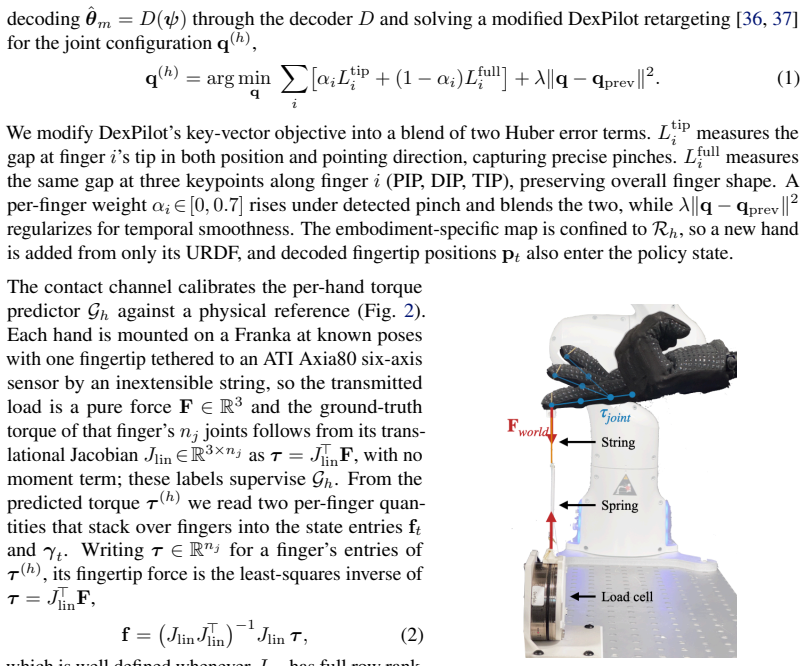
Dexterous grasping depends on contact regulation, not motion alone. Stable manipulation requires fingers to maintain appropriate object loading as contacts slip, deform, or become visually occluded. Existing cross-embodiment dexterous policies unify motion through retargeted hand poses or latent actions, but force feedback remains tied to each hand's sensing and actuation, limiting transfer. This work introduces a cross-embodiment force-position interface for contact-aware manipulation across heterogeneous dexterous hands. Motion intent is represented in a shared hand-pose latent, while each hand's effort signal is calibrated through system identification into physical joint torque in N.m. These torques are mapped to fingertip forces and compact per-finger load descriptors, giving the policy comparable observations of where the hand should move and how the object is loaded. Using this interface, a flow-matching visuomotor policy is trained on vision, proprioception, and calibrated contact, with structured visual masking that encourages reliance on force under grasp-relevant occlusion. The same calibrated signal drives a hybrid force-position controller for demonstration collection and execution, keeping force targets consistent across training and deployment. Experiments across structurally different hands show that calibrated contact feedback enables transferable compliant grasping, with learned primitives reusable in long-horizon manipulation pipelines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a cross-embodiment force-position interface for compliant grasping across heterogeneous dexterous hands. Motion intent is encoded in a shared hand-pose latent while each hand's effort signal is calibrated via system identification to physical joint torques (N·m), then mapped to fingertip forces and compact per-finger load descriptors. A flow-matching visuomotor policy is trained on vision, proprioception, and these calibrated contact signals with structured visual masking; the same signals drive a hybrid force-position controller for both data collection and execution. Experiments on structurally different hands are claimed to show that calibrated contact enables transferable compliant grasping with primitives reusable in long-horizon pipelines.
Significance. If the system-identification calibration produces interchangeable fingertip-force and per-finger load observations across hardware, the work would meaningfully advance cross-embodiment transfer in contact-rich manipulation by decoupling force feedback from hand-specific sensing and actuation, going beyond motion-only retargeting. The hybrid controller and occlusion-aware masking are concrete design choices that could improve robustness.
minor comments (1)
- [Abstract] The abstract states that experiments demonstrate transferable grasping but supplies no quantitative metrics, error bars, dataset sizes, ablation results, or baseline comparisons, preventing assessment of whether the calibration actually supports the transfer claim.
Simulated Author's Rebuttal
We thank the referee for their review and for recognizing the potential of the cross-embodiment force-position interface to advance contact-rich transfer beyond motion-only retargeting. The recommendation of 'uncertain' is noted; we address the overall report below. No specific major comments were enumerated in the provided report, so we have no point-by-point rebuttals to offer at this stage.
Circularity Check
No significant circularity identified
full rationale
The paper's pipeline calibrates raw effort signals via system identification to physical joint torques (N·m), then maps those to fingertip forces and per-finger load descriptors. This step references external physical units rather than any fitted parameter or self-referential definition, allowing the shared pose latent and hybrid controller to treat signals as interchangeable. No equations or claims reduce a prediction to its own inputs by construction, no self-citation chains are load-bearing, and no ansatz is smuggled in. The derivation remains self-contained against external physical benchmarks and falsifiable measurements.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
H. Yuan, B. Zhou, Y . Fu, and Z. Lu. Cross-embodiment dexterous grasping with reinforcement learning, 2024. URLhttps://arxiv.org/abs/2410.02479
arXiv 2024
- [2]
-
[3]
N. Hogan. Impedance control: An approach to manipulation: Part II—implementation.Journal of Dynamic Systems, Measurement, and Control, 107(1):8, 1985. doi:10.1115/1.3140713. URL https://doi.org/10.1115%2F1.3140713
-
[4]
Z. Wu, R. A. Potamias, X. Zhang, Z. Zhang, J. Deng, and S. Luo. Cedex: Cross-embodiment dexterous grasp generation at scale from human-like contact representations, 2025. URL https://arxiv.org/abs/2509.24661
arXiv 2025
- [5]
-
[6]
R. Bhirangi, V . Pattabiraman, E. Erciyes, Y . Cao, T. Hellebrekers, and L. Pinto. Anyskin: Plug- and-play skin sensing for robotic touch, 2024. URL https://arxiv.org/abs/2409.08276
arXiv 2024
- [7]
-
[8]
H. Seraji. Adaptive hybrid control of manipulators. InProceedings of the Workshop on Space Telerobotics, V olume 3, 1987
1987
-
[9]
D. McAllister, S. Ge, B. Yi, C. M. Kim, E. Weber, H. Choi, H. Feng, and A. Kanazawa. Flow matching policy gradients, 2025. URLhttps://arxiv.org/abs/2507.21053
arXiv 2025
-
[10]
X. Fei, Z. Xu, H. Fang, T. Zhang, and L. Shao. T(r,o) grasp: Efficient graph diffusion of robot-object spatial transformation for cross-embodiment dexterous grasping, 2025. URL https://arxiv.org/abs/2510.12724
arXiv 2025
- [11]
-
[12]
J. Romero, D. Tzionas, and M. J. Black. Embodied hands: modeling and capturing hands and bodies together.ACM Transactions on Graphics, 36(6):1–17, Nov. 2017. ISSN 1557-7368. doi:10.1145/3130800.3130883. URLhttp://dx.doi.org/10.1145/3130800.3130883
-
[13]
High-precision hand tracking & mocap gloves — manus
MANUS Technology Group. High-precision hand tracking & mocap gloves — manus. https: //www.manus-meta.com/, 2025. Accessed: 2025-09-13
2025
- [14]
-
[15]
T. Tao, M. K. Srirama, J. J. Liu, K. Shaw, and D. Pathak. Dexwild: Dexterous human interactions for in-the-wild robot policies, 2026. URLhttps://arxiv.org/abs/2505.07813
Pith/arXiv arXiv 2026
-
[16]
M. Xu, H. Zhang, Y . Hou, Z. Xu, L. Fan, M. Veloso, and S. Song. Dexumi: Using human hand as the universal manipulation interface for dexterous manipulation, 2025. URL https: //arxiv.org/abs/2505.21864
arXiv 2025
-
[17]
H.-S. Fang, B. Romero, Y . Xie, A. Hu, B.-R. Huang, J. Alvarez, M. Kim, G. Margolis, K. An- barasu, M. Tomizuka, E. Adelson, and P. Agrawal. Dexop: A device for robotic transfer of dexterous human manipulation, 2025. URLhttps://arxiv.org/abs/2509.04441
arXiv 2025
-
[18]
K. Zhu, F. Bai, Y . Xiang, Y . Cai, X. Chen, R. Li, X. Wang, H. Dong, Y . Yang, X. Fan, and Y . Chen. Dexflywheel: A scalable and self-improving data generation framework for dexterous manipulation, 2025. URLhttps://arxiv.org/abs/2509.23829
arXiv 2025
-
[19]
S. Atar, D. Huang, F. Richter, and M. Yip. In-hand manipulation of articulated tools with dexterous robot hands with sim-to-real transfer, 2026. URL https://arxiv.org/abs/2509. 23075
2026
-
[20]
H. Shi, S. Hu, Y . Hou, W. Wang, K. Liu, and S. Song. Minimalist compliance control, 2026. URLhttps://arxiv.org/abs/2603.00913
arXiv 2026
-
[21]
S. Chen, J. Bohg, and C. K. Liu. Springgrasp: An optimization pipeline for robust and compliant dexterous pre-grasp synthesis, 2024
2024
-
[22]
R. Chen, M. Mukadam, M. Kaess, T. Wu, F. R. Hogan, J. Malik, and A. Sharma. Ptld: Sim- to-real privileged tactile latent distillation for dexterous manipulation, 2026. URL https: //arxiv.org/abs/2603.04531
Pith/arXiv arXiv 2026
-
[23]
C. Higuera, A. Sharma, C. K. Bodduluri, T. Fan, P. Lancaster, M. Kalakrishnan, M. Kaess, B. Boots, M. Lambeta, T. Wu, and M. Mukadam. Sparsh: Self-supervised touch representations for vision-based tactile sensing, 2024. URLhttps://arxiv.org/abs/2410.24090
arXiv 2024
-
[24]
X. Chen, Y . Pan, M. Li, and X. Ding. Dexvitac: Collecting human visuo-tactile-kinematic demonstrations for contact-rich dexterous manipulation, 2026. URL https://arxiv.org/ abs/2603.17851
arXiv 2026
-
[25]
W. Peebles and S. Xie. Scalable diffusion models with transformers, 2023. URL https: //arxiv.org/abs/2212.09748
Pith/arXiv arXiv 2023
-
[26]
E. Collaboration, A. O’Neill, A. Rehman, A. Gupta, A. Maddukuri, A. Gupta, et al. Open x-embodiment: Robotic learning datasets and rt-x models, 2025. URL https://arxiv.org/ abs/2310.08864
Pith/arXiv arXiv 2025
-
[27]
O. M. Team, D. Ghosh, H. Walke, K. Pertsch, K. Black, O. Mees, S. Dasari, J. Hejna, T. Kreiman, C. Xu, J. Luo, Y . L. Tan, L. Y . Chen, P. Sanketi, Q. Vuong, T. Xiao, D. Sadigh, C. Finn, and S. Levine. Octo: An open-source generalist robot policy, 2024. URL https://arxiv.org/ abs/2405.12213. 10
Pith/arXiv arXiv 2024
-
[28]
M. J. Kim, K. Pertsch, S. Karamcheti, T. Xiao, A. Balakrishna, S. Nair, R. Rafailov, E. Foster, G. Lam, P. Sanketi, Q. Vuong, T. Kollar, B. Burchfiel, R. Tedrake, D. Sadigh, S. Levine, P. Liang, and C. Finn. Openvla: An open-source vision-language-action model, 2024. URL https://arxiv.org/abs/2406.09246
Pith/arXiv arXiv 2024
-
[29]
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, et al. π0: A vision-language-action flow model for general robot control, 2026. URLhttps://arxiv.org/abs/2410.24164
Pith/arXiv arXiv 2026
-
[30]
S. Liu, L. Wu, B. Li, H. Tan, H. Chen, Z. Wang, K. Xu, H. Su, and J. Zhu. Rdt-1b: a diffusion foundation model for bimanual manipulation, 2025. URL https://arxiv.org/abs/2410. 07864
2025
-
[31]
J. Wen, Y . Zhu, J. Li, Z. Tang, C. Shen, and F. Feng. Dexvla: Vision-language model with plug-in diffusion expert for general robot control, 2025. URL https://arxiv.org/abs/ 2502.05855
Pith/arXiv arXiv 2025
-
[32]
H. Liu, S. Guo, P. Mai, J. Cao, H. Li, and J. Ma. Robodexvlm: Visual language model- enabled task planning and motion control for dexterous robot manipulation, 2025. URL https://arxiv.org/abs/2503.01616
arXiv 2025
- [33]
-
[34]
V . de Bakker, J. Hejna, T. G. W. Lum, O. Celik, A. Taranovic, D. Blessing, G. Neumann, J. Bohg, and D. Sadigh. Scaffolding dexterous manipulation with vision-language models, 2026. URLhttps://arxiv.org/abs/2506.19212
arXiv 2026
-
[35]
Romero, D
J. Romero, D. Tzionas, and M. J. Black. Embodied hands: Modeling and capturing hands and bodies together.ACM Transactions on Graphics, (Proc. SIGGRAPH Asia), 36(6), Nov. 2017
2017
- [36]
-
[37]
He and W
G. He and W. Zhang. Wujihand retargeting, 2026. URL https://github.com/ wuji-technology/wuji-retargeting. * Equal contribution
2026
-
[38]
K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition, 2015. URL https://arxiv.org/abs/1512.03385
Pith/arXiv arXiv 2015
-
[39]
C. Ott, R. Mukherjee, and Y . Nakamura. Unified impedance and admittance control. In2010 IEEE international conference on robotics and automation, pages 554–561. IEEE, 2010
2010
-
[40]
G. Yan, J. Zhu, Y . Deng, S. Yang, R.-Z. Qiu, X. Cheng, M. Memmel, R. Krishna, A. Goyal, X. Wang, and D. Fox. Maniflow: A dexterous manipulation policy via flow matching.arXiv preprint arXiv:, 2025
2025
-
[41]
point": [u_min, v_min, u_max, v_max],
T. L. Team, B. Burchfiel, H. Kress-Gazit, S. Feng, S. Ford, R. Tedrake, et al. A careful examination of large behavior models for multitask dexterous manipulation, 2025. URL https://arxiv.org/abs/2507.05331. 11 Figure S1:Spatial torque descriptor Appendix S1 System Identification Details Mechanical setup.A Franka Emika Panda arm holds the dexterous hand a...
Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.