Beyond Failure Recovery: An Engagement-Aware Human-in-the-loop Framework for Robotic Systems
Pith reviewed 2026-06-27 00:21 UTC · model grok-4.3
The pith
Engagement-aware MPC plans interactions proactively to hold user engagement at a target level while respecting workload limits.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
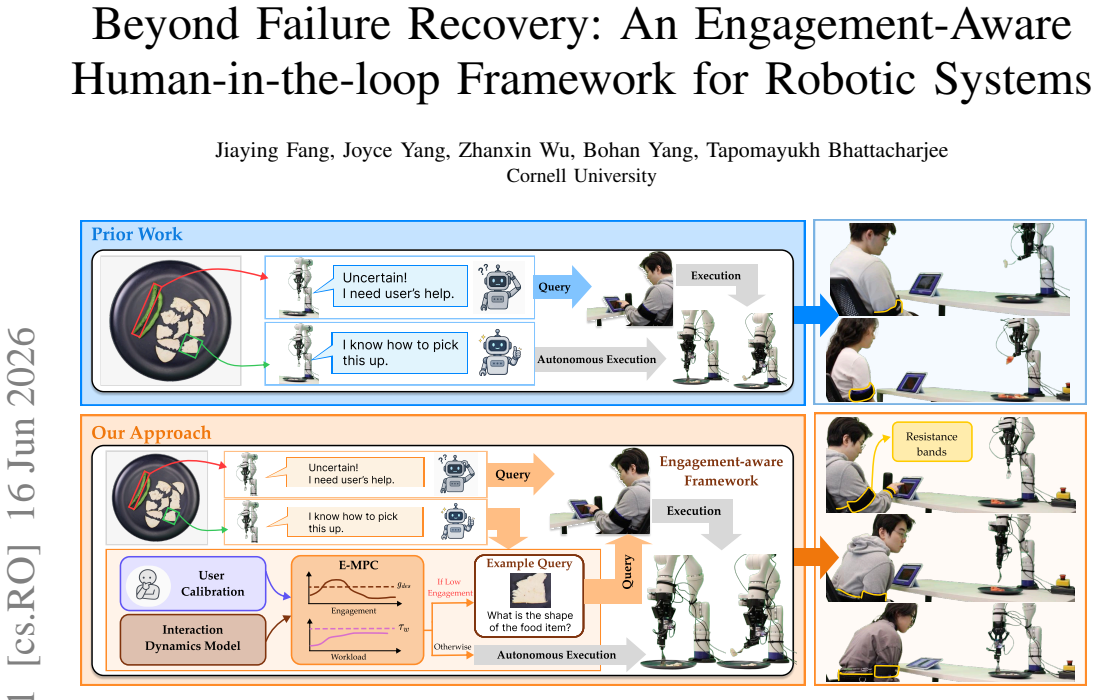
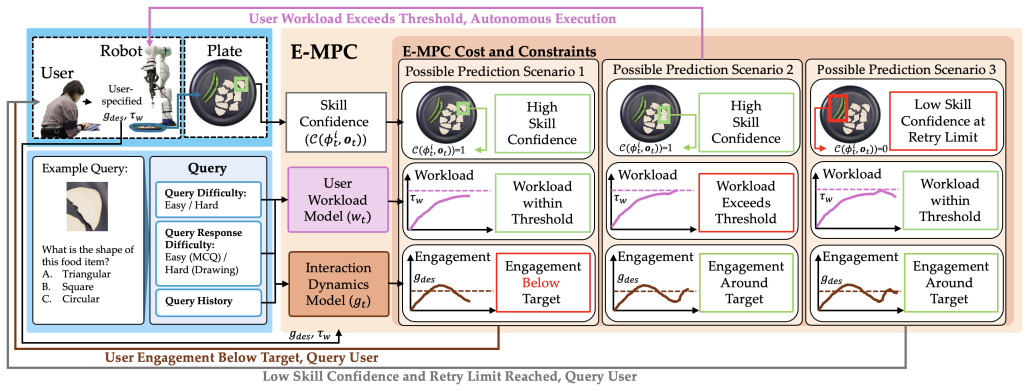
E-MPC is a model-predictive controller that incorporates an explicit user-interaction dynamics model; the model predicts how engagement evolves as a function of interaction frequency and type, and the planner selects interaction actions at each step to drive predicted engagement toward a desired setpoint while enforcing a workload constraint and preserving task completion.
What carries the argument
Engagement-aware Model Predictive Control (E-MPC) that embeds a dynamics model of engagement evolution driven by interaction frequency and type.
If this is right
- Robots can schedule user input at regular intervals rather than only on failure, keeping users involved in decision-making for the entire task duration.
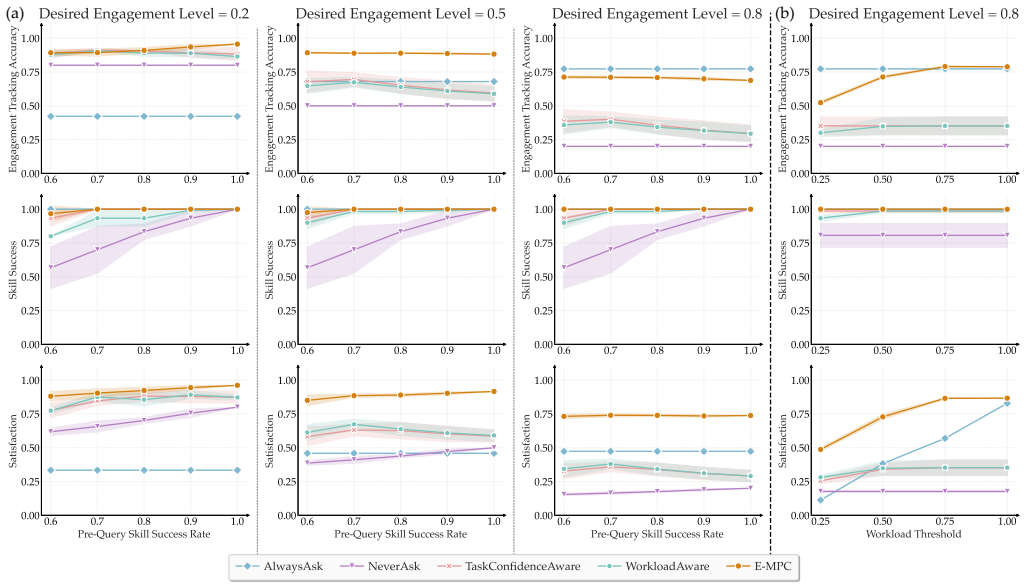
- Task performance metrics remain comparable to failure-triggered baselines while subjective engagement and workload scores improve.
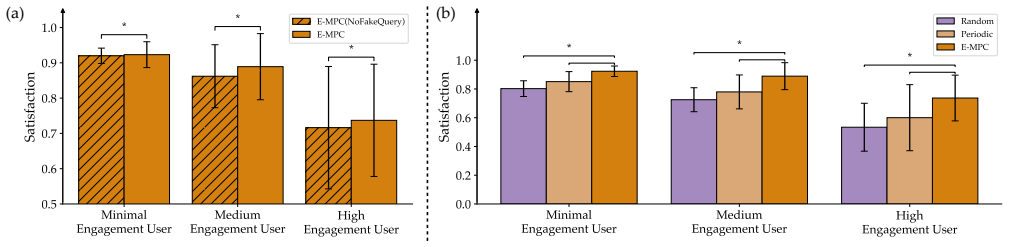
- The same planning structure can be tuned to different target engagement setpoints for users who prefer more or less involvement.
- In physical caregiving, users with mobility constraints avoid long passive intervals without incurring extra fatigue from constant requests.
Where Pith is reading between the lines
- The method could be tested in domains outside caregiving, such as shared-control manufacturing or navigation assistance, where sustained attention matters.
- Learning the engagement dynamics parameters online from individual users would allow the planner to adapt without a pre-specified model.
- Adding explicit uncertainty bounds on the engagement predictions would let the controller trade off engagement risk against task risk in a more principled way.
Load-bearing premise
The dynamics model that maps interaction frequency and type to future engagement levels is accurate enough for the optimizer to reliably reach the target engagement without violating workload limits.
What would settle it
A follow-up study that measures actual engagement trajectories under E-MPC plans and finds statistically significant, systematic deviations from the model's predictions that cause either sustained disengagement or workload violations.
Figures
read the original abstract
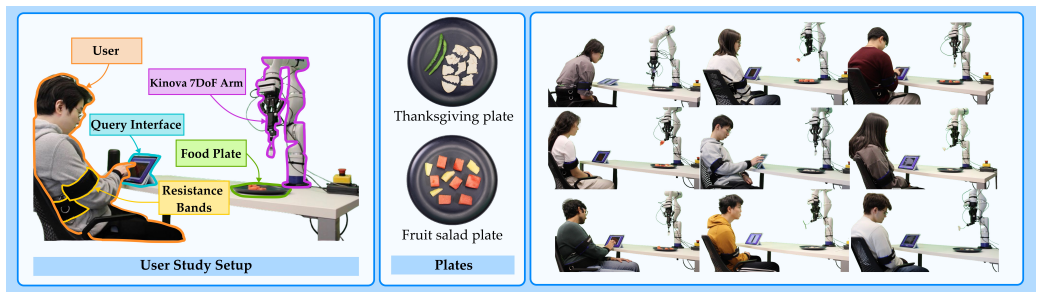
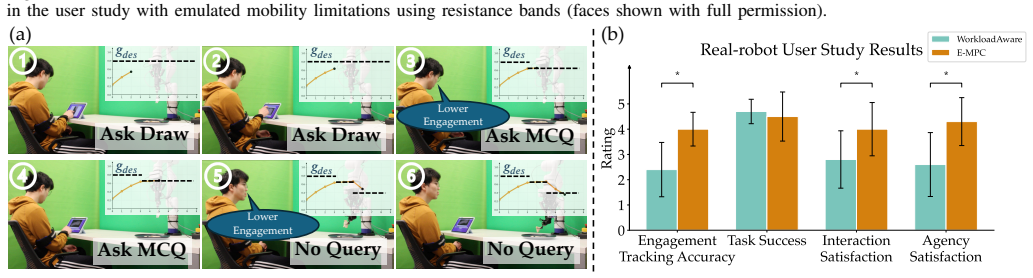
Conventional human-in-the-loop approaches typically involve users only when a robot encounters failure or uncertainty, treating humans primarily as tools for improving robot performance. However, in many human-centered robotics settings, interaction should support engagement by keeping users involved in decision-making rather than limiting them to failure-driven interventions. This is particularly compelling in physical caregiving, where mobility limitations can reduce users' ability to intervene or modulate the robot's behavior in the moment. As a result, failure-driven interaction policies may relegate users to passive observers for long stretches of the task. For example, a user with mobility limitations may feel less engaged when being continuously and passively fed by a robot. At the same time, overly frequent interaction can be tiring and increase the user's workload. To address this trade-off, we propose Engagement-aware MPC (E-MPC), a user-engagement-aware method that plans interaction to maintain engagement while respecting a workload constraint. E-MPC leverages a user interaction dynamics model that captures how user engagement evolves as a function of both the frequency and type of interaction. Rather than requesting input only when difficulties arise during task execution, the robot proactively considers the user's preferred level of engagement throughout the task, balancing autonomy and interaction while ensuring task success. We evaluate E-MPC in simulation with several ablations and baseline comparisons. Results demonstrate the effectiveness of our approach across diverse user personas. In addition, we conduct a real-world user study with participants with emulated mobility limitations on a robot-assisted bite acquisition system, showing that E-MPC improves user experience while maintaining task success.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Engagement-aware MPC (E-MPC), an extension of standard MPC for human-in-the-loop robotic systems (e.g., caregiving for mobility-limited users). E-MPC uses a user interaction dynamics model that maps interaction frequency and type to evolving engagement levels; the planner proactively selects interactions to maintain a target engagement while respecting workload constraints and preserving task success. Evaluation consists of simulation ablations and baseline comparisons across user personas plus a real-world user study on a robot-assisted bite acquisition task with emulated mobility limitations, claiming improved user experience without loss of task performance.
Significance. If the engagement dynamics model is shown to be accurate and generalizable, the work offers a principled shift from reactive failure-recovery to proactive engagement maintenance in HRI. This could matter for assistive robotics where prolonged passivity harms user well-being; the combination of MPC with an explicit engagement state and the dual simulation-plus-real-user evaluation would be a concrete contribution if the model holds.
major comments (2)
- [Abstract / User Interaction Dynamics Model section] The central claim that proactive engagement planning improves UX rests on the accuracy of the user interaction dynamics model (Abstract). The manuscript must demonstrate that this model was derived or validated independently of the final user-study outcomes; otherwise the reported UX gains cannot be attributed to the engagement-aware component rather than other MPC elements or study design.
- [Evaluation section] Simulation ablations and the real-world study are presented as evidence across personas, yet the abstract supplies no quantitative metrics (e.g., engagement scores, workload ratings, statistical tests, sample size). Without these, it is impossible to judge whether the workload constraint is actually satisfied or whether task success is maintained at a level comparable to baselines.
minor comments (2)
- [Methods] Clarify whether the engagement dynamics model contains any free parameters fitted to the same user-study data used for final evaluation.
- [Abstract] The abstract states that E-MPC 'maintains task success'; explicit comparison tables or figures showing success rates versus baselines would strengthen this.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the validation of the engagement model and the need for quantitative metrics in the abstract. We address each major comment below and will incorporate revisions where appropriate to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract / User Interaction Dynamics Model section] The central claim that proactive engagement planning improves UX rests on the accuracy of the user interaction dynamics model (Abstract). The manuscript must demonstrate that this model was derived or validated independently of the final user-study outcomes; otherwise the reported UX gains cannot be attributed to the engagement-aware component rather than other MPC elements or study design.
Authors: The user interaction dynamics model is grounded in prior HRI literature on engagement and workload, with its structure and parameters initially specified and ablated in simulation studies performed independently of the real-world user study. The simulation results across personas serve as the primary validation of the model's predictive accuracy for engagement evolution. The user study evaluates the end-to-end E-MPC framework rather than fitting the model itself. To address the concern directly, we will add an explicit subsection detailing the literature basis, simulation-based derivation, and pre-study validation steps so that readers can clearly separate model development from the final evaluation. revision: yes
-
Referee: [Evaluation section] Simulation ablations and the real-world study are presented as evidence across personas, yet the abstract supplies no quantitative metrics (e.g., engagement scores, workload ratings, statistical tests, sample size). Without these, it is impossible to judge whether the workload constraint is actually satisfied or whether task success is maintained at a level comparable to baselines.
Authors: We agree that the abstract would benefit from quantitative results to allow readers to assess the claims at a glance. We will revise the abstract to include key metrics from both the simulation (e.g., engagement maintenance rates, workload constraint satisfaction percentages) and the user study (e.g., mean engagement scores, NASA-TLX workload ratings, task success rates, statistical comparisons to baselines, and participant sample size). revision: yes
Circularity Check
No significant circularity; derivation relies on independent dynamics model and external evaluations
full rationale
The paper's central claim rests on proposing E-MPC that uses a user interaction dynamics model to evolve engagement based on interaction frequency and type, then optimizes under workload constraints. This model is introduced as a modeling choice rather than derived from the target result, and effectiveness is shown via simulation ablations plus a real-user study with emulated mobility limitations. No equations or claims reduce the predictions to fitted inputs by construction, no self-citation chains justify uniqueness, and no ansatz or renaming is smuggled in. The load-bearing element is the model's accuracy (an empirical assumption), not a definitional loop.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
To ask or not to ask: Human-in-the-loop contextual bandits with applica- tions in robot-assisted feeding
Rohan Banerjee, Rajat Kumar Jenamani, Sidharth Va- sudev, Amal Nanavati, Katherine Dimitropoulou, Sarah Dean, and Tapomayukh Bhattacharjee. To ask or not to ask: Human-in-the-loop contextual bandits with applica- tions in robot-assisted feeding. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 1378–1384. IEEE, 2025
2025
-
[2]
A human-in-the-loop confidence- aware failure recovery framework for modular robot policies
Rohan Banerjee, Krishna Palempalli, Bohan Yang, Jiaying Fang, Alif Abdullah, Tom Silver, Sarah Dean, and Tapo- mayukh Bhattacharjee. A human-in-the-loop confidence- aware failure recovery framework for modular robot policies. InProceedings of the ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2026
2026
-
[3]
Is more autonomy always better? exploring preferences of users with mobility impairments in robot-assisted feeding
Tapomayukh Bhattacharjee, Ethan K Gordon, Rosario Scalise, Maria E Cabrera, Anat Caspi, Maya Cakmak, and Siddhartha S Srinivasa. Is more autonomy always better? exploring preferences of users with mobility impairments in robot-assisted feeding. InProceedings of the 2020 ACM/IEEE international conference on human- robot interaction, pages 181–190, 2020
2020
-
[4]
Laura Esther Bijkerk, Anke Oenema, Nicole Geschwind, and Mark Spigt. Measuring engagement with mental health and behavior change interventions: an integrative review of methods and instruments.International journal of behavioral medicine, 30(2):155–166, 2023
2023
-
[5]
Assessing student engagement from facial behavior in on-line learning.Multimedia Tools and Applications, 82(9):12859– 12877, 2023
Paolo Buono, Berardina De Carolis, Francesca D’Errico, Nicola Macchiarulo, and Giuseppe Palestra. Assessing student engagement from facial behavior in on-line learning.Multimedia Tools and Applications, 82(9):12859– 12877, 2023
2023
-
[6]
Sam 3: Segment anything with concepts, 2025
Nicolas Carion, Laura Gustafson, Yuan-Ting Hu, Shoub- hik Debnath, Ronghang Hu, Didac Suris, Chaitanya Ryali, Kalyan Vasudev Alwala, Haitham Khedr, An- drew Huang, Jie Lei, Tengyu Ma, Baishan Guo, Arpit Kalla, Markus Marks, Joseph Greer, Meng Wang, Peize Sun, Roman R ¨adle, Triantafyllos Afouras, Effrosyni Mavroudi, Katherine Xu, Tsung-Han Wu, Yu Zhou, Li...
Pith/arXiv arXiv 2025
-
[7]
The sense of agency in assistive robotics using shared autonomy
Maggie A Collier, Rithika Narayan, and Henny Admoni. The sense of agency in assistive robotics using shared autonomy. In2025 20th ACM/IEEE International Confer- ence on Human-Robot Interaction (HRI), pages 880–888. IEEE, 2025
2025
-
[8]
The sense of agency in emerging technologies for human–computer integration: A review
Patricia Cornelio, Patrick Haggard, Kasper Hornbaek, Orestis Georgiou, Joanna Bergstr¨om, Sriram Subramanian, and Marianna Obrist. The sense of agency in emerging technologies for human–computer integration: A review. Frontiers in Neuroscience, 16:949138, 2022
2022
-
[9]
Learning on the job: Long-term behavioural adaptation in human-robot interactions.IEEE Robotics and Automation Letters, 7 (3):6934–6941, 2022
Francesco Del Duchetto and Marc Hanheide. Learning on the job: Long-term behavioural adaptation in human-robot interactions.IEEE Robotics and Automation Letters, 7 (3):6934–6941, 2022
2022
-
[10]
Are you still with me? continuous engagement assessment from a robot’s point of view.Frontiers in Robotics and AI, 7:116, 2020
Francesco Del Duchetto, Paul Baxter, and Marc Hanheide. Are you still with me? continuous engagement assessment from a robot’s point of view.Frontiers in Robotics and AI, 7:116, 2020
2020
-
[11]
Engagement in hci: conception, theory and measurement.ACM computing surveys (CSUR), 51(5):1–39, 2018
Kevin Doherty and Gavin Doherty. Engagement in hci: conception, theory and measurement.ACM computing surveys (CSUR), 51(5):1–39, 2018
2018
-
[12]
A policy- blending formalism for shared control.The International Journal of Robotics Research, 32(7):790–805, 2013
Anca D Dragan and Siddhartha S Srinivasa. A policy- blending formalism for shared control.The International Journal of Robotics Research, 32(7):790–805, 2013
2013
-
[13]
Human autonomy and sense of agency in human-robot interaction: A systematic literature review
Felix Glawe, Tim Schmeckel, Philipp Brauner, and Martina Ziefle. Human autonomy and sense of agency in human-robot interaction: A systematic literature review. arXiv preprint arXiv:2509.22271, 2025
Pith/arXiv arXiv 2025
-
[14]
An adaptable, safe, and portable robot-assisted feeding system
Ethan K Gordon, Rajat Kumar Jenamani, Amal Nanavati, Ziang Liu, Daniel Stabile, Xilai Dai, Tapomayukh Bhat- tacharjee, Tyler Schrenk, Jonathan Ko, Haya Bolotski, et al. An adaptable, safe, and portable robot-assisted feeding system. InCompanion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, pages 74–76, 2024
2024
-
[15]
Glas, Iolanda Leite, and Kheng Lee Koay
Bahar Irfan, Aditi Ramachandran, Samuel Spaulding, Dylan F. Glas, Iolanda Leite, and Kheng Lee Koay. Personalization in long-term human-robot interaction. In2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), pages 685–686, 2019. doi: 10.1109/HRI.2019.8673076
-
[16]
Shared autonomy via hindsight optimization
Shervin Javdani, Siddhartha Srinivasa, and Andrew Bag- nell. Shared autonomy via hindsight optimization. In Proceedings of Robotics: Science and Systems, Rome, Italy, July 2015. doi: 10.15607/RSS.2015.XI.032
-
[17]
Feel the bite: Robot-assisted inside-mouth bite transfer using robust mouth perception and physical interaction-aware control
Rajat Kumar Jenamani, Daniel Stabile, Ziang Liu, Abrar Anwar, Katherine Dimitropoulou, and Tapomayukh Bhat- tacharjee. Feel the bite: Robot-assisted inside-mouth bite transfer using robust mouth perception and physical interaction-aware control. InProceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, pages 313–322, 2024
2024
-
[18]
Flair: Feeding via long-horizon acquisition of realistic dishes
Rajat Kumar Jenamani, Priya Sundaresan, Maram Sakr, Tapomayukh Bhattacharjee, and Dorsa Sadigh. Flair: Feeding via long-horizon acquisition of realistic dishes. arXiv preprint arXiv:2407.07561, 2024
arXiv 2024
-
[19]
Rajat Kumar Jenamani, Tom Silver, Ben Dodson, Shiqin Tong, Anthony Song, Yuting Yang, Ziang Liu, Ben- jamin Howe, Aimee Whitneck, and Tapomayukh Bhat- tacharjee. Feast: A flexible mealtime-assistance system towards in-the-wild personalization.arXiv preprint arXiv:2506.14968, 2025
arXiv 2025
-
[20]
Hg-dagger: In- teractive imitation learning with human experts
Michael Kelly, Chelsea Sidrane, Katherine Driggs- Campbell, and Mykel J Kochenderfer. Hg-dagger: In- teractive imitation learning with human experts. In2019 International Conference on Robotics and Automation (ICRA), pages 8077–8083. IEEE, 2019
2019
-
[21]
Srt-h: A hierarchical framework for autonomous surgery via language-conditioned imitation learning.Science robotics, 10(104):eadt5254, 2025
Ji Woong Kim, Juo-Tung Chen, Pascal Hansen, Lucy Xi- aoyang Shi, Antony Goldenberg, Samuel Schmidgall, Paul Maria Scheikl, Anton Deguet, Brandon M White, De Ru Tsai, et al. Srt-h: A hierarchical framework for autonomous surgery via language-conditioned imitation learning.Science robotics, 10(104):eadt5254, 2025
2025
-
[22]
User experience of human-robot long-term interac- tions
Guy Laban, Arvid Kappas, Val Morrison, and Emily S Cross. User experience of human-robot long-term interac- tions. InProceedings of the 10th international conference on human-agent interaction, pages 287–289, 2022
2022
-
[23]
Interactive task planning with language models.arXiv preprint arXiv:2310.10645, 2023
Boyi Li, Philipp Wu, Pieter Abbeel, and Jitendra Malik. Interactive task planning with language models.arXiv preprint arXiv:2310.10645, 2023
arXiv 2023
-
[24]
Robot learning on the job: Human-in- the-loop autonomy and learning during deployment.The International Journal of Robotics Research, 44(10-11): 1727–1742, 2025
Huihan Liu, Soroush Nasiriany, Lance Zhang, Zhiyao Bao, and Yuke Zhu. Robot learning on the job: Human-in- the-loop autonomy and learning during deployment.The International Journal of Robotics Research, 44(10-11): 1727–1742, 2025
2025
-
[25]
Long-term interactions with social robots: Trends, insights, and recommendations.ACM Transactions on Human-Robot Interaction, 14(3):1–42, 2025
Kayla Matheus, Rebecca Ramnauth, Brian Scassellati, and Nicole Salomons. Long-term interactions with social robots: Trends, insights, and recommendations.ACM Transactions on Human-Robot Interaction, 14(3):1–42, 2025
2025
-
[26]
Meet me where i’m gazing: how shared attention gaze affects human-robot handover timing
AJung Moon, Daniel M Troniak, Brian Gleeson, Matthew KXJ Pan, Minhua Zheng, Benjamin A Blumer, Karon MacLean, and Elizabeth A Croft. Meet me where i’m gazing: how shared attention gaze affects human-robot handover timing. InProceedings of the 2014 ACM/IEEE international conference on Human-robot interaction, pages 334–341, 2014
2014
-
[27]
Jauwairia Nasir, Barbara Bruno, Mohamed Chetouani, and Pierre Dillenbourg. What if social robots look for productive engagement? automated assessment of goal- centric engagement in learning applications.International Journal of Social Robotics, 14(1):55–71, 2022
2022
-
[28]
Acceptance of remote assistive robots with and without human-in-the-loop for healthcare applications.International Journal of Social Robotics, 16(6):1131–1150, 2024
Simone Nertinger, Robin Jeanne Kirschner, Abdeldjallil Naceri, and Sami Haddadin. Acceptance of remote assistive robots with and without human-in-the-loop for healthcare applications.International Journal of Social Robotics, 16(6):1131–1150, 2024
2024
-
[29]
Heather L O’Brien and Elaine G Toms. What is user engagement? a conceptual framework for defining user engagement with technology.Journal of the American society for Information Science and Technology, 59(6): 938–955, 2008
2008
-
[30]
Engagement in human-agent interaction: An overview.Frontiers in Robotics and AI, 7:92, 2020
Catharine Oertel, Ginevra Castellano, Mohamed Chetouani, Jauwairia Nasir, Mohammad Obaid, Catherine Pelachaud, and Christopher Peters. Engagement in human-agent interaction: An overview.Frontiers in Robotics and AI, 7:92, 2020
2020
-
[31]
Allen Z Ren, Anushri Dixit, Alexandra Bodrova, Sumeet Singh, Stephen Tu, Noah Brown, Peng Xu, Leila Takayama, Fei Xia, Jake Varley, et al. Robots that ask for help: Uncertainty alignment for large language model planners.arXiv preprint arXiv:2307.01928, 2023
arXiv 2023
-
[32]
Recognizing engagement in human- robot interaction
Charles Rich, Brett Ponsler, Aaron Holroyd, and Can- dace L Sidner. Recognizing engagement in human- robot interaction. In2010 5th ACM/IEEE International Conference on Human-Robot Interaction (HRI), pages 375–382. IEEE, 2010
2010
-
[33]
A reduction of imitation learning and structured prediction to no-regret online learning
St´ephane Ross, Geoffrey Gordon, and Drew Bagnell. A reduction of imitation learning and structured prediction to no-regret online learning. InProceedings of the fourteenth international conference on artificial intelligence and statistics, pages 627–635. JMLR Workshop and Confer- ence Proceedings, 2011
2011
-
[34]
Self-determination theory and the facilitation of intrinsic motivation, social development, and well-being.American psychologist, 55 (1):68, 2000
Richard M Ryan and Edward L Deci. Self-determination theory and the facilitation of intrinsic motivation, social development, and well-being.American psychologist, 55 (1):68, 2000
2000
-
[35]
Auto- matic analysis of affective postures and body motion to detect engagement with a game companion
Jyotirmay Sanghvi, Ginevra Castellano, Iolanda Leite, Andr´e Pereira, Peter W McOwan, and Ana Paiva. Auto- matic analysis of affective postures and body motion to detect engagement with a game companion. InProceed- ings of the 6th international conference on Human-robot interaction, pages 305–312, 2011
2011
-
[36]
Correcting robot plans with natural language feedback.arXiv preprint arXiv:2204.05186, 2022
Pratyusha Sharma, Balakumar Sundaralingam, Valts Blukis, Chris Paxton, Tucker Hermans, Antonio Tor- ralba, Jacob Andreas, and Dieter Fox. Correcting robot plans with natural language feedback.arXiv preprint arXiv:2204.05186, 2022
arXiv 2022
-
[37]
Yell at your robot: Improving on-the-fly from language corrections
Lucy Xiaoyang Shi, Zheyuan Hu, Tony Z Zhao, Archit Sharma, Karl Pertsch, Jianlan Luo, Sergey Levine, and Chelsea Finn. Yell at your robot: Improving on-the-fly from language corrections. InRobotics: Science and Systems, 2024
2024
-
[38]
From the definition to the automatic assessment of engagement in human–robot interaction: A systematic review.International Journal of Social Robotics, 16(7): 1641–1663, 2024
Alessandra Sorrentino, Laura Fiorini, and Filippo Cavallo. From the definition to the automatic assessment of engagement in human–robot interaction: A systematic review.International Journal of Social Robotics, 16(7): 1641–1663, 2024
2024
-
[39]
Sensing and handling engagement dynamics in human-robot interaction involving peripheral computing devices
Mingfei Sun, Zhenjie Zhao, and Xiaojuan Ma. Sensing and handling engagement dynamics in human-robot interaction involving peripheral computing devices. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, pages 556–567, 2017
2017
-
[40]
Claire Yang, Heer Patel, Max Kleiman-Weiner, and Maya Cakmak. Preserving sense of agency: User preferences for robot autonomy and user control across household tasks.arXiv preprint arXiv:2506.19202, 2025
arXiv 2025
-
[41]
Morpheus: a multimodal one-armed robot-assisted peeling system with human users in-the-loop
Ruolin Ye, Yifei Hu, Yuhan Anjelica Bian, Luke Kulm, and Tapomayukh Bhattacharjee. Morpheus: a multimodal one-armed robot-assisted peeling system with human users in-the-loop. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 9540–9547. IEEE, 2024
2024
-
[42]
Distilling and retrieving generalizable knowledge for robot manipulation via language correc- tions
Lihan Zha, Yuchen Cui, Li-Heng Lin, Minae Kwon, Montserrat Gonzalez Arenas, Andy Zeng, Fei Xia, and Dorsa Sadigh. Distilling and retrieving generalizable knowledge for robot manipulation via language correc- tions. In2024 IEEE international conference on robotics and automation (ICRA), pages 15172–15179. IEEE, 2024. APPENDIX A. Simulation results Across W...
2024
-
[43]
[Show a demo of the hard drawing-based question] How engaged would you feel if you keep interacting with the robot by answering this type of drawing-based questions?
-
[44]
[Show a demo of the easy MCQ] How engaged would you feel if you keep interacting with the robot by answering this type of food shape questions?
-
[45]
How engaged do you want to be in this task? (Note: Your answer would change how often you are asked by the robot and the type of questions)
-
[46]
draw pick up points
What is the largest workload you can accept in this task? (Note: 10% roughly corresponds to asking you one "draw pick up points" question in 5 minutes, 100% roughly corresponds to asking you "draw pick up points " questions 10 times in 5 minutes.) G. Post-Method Questions Asked in User Study
-
[47]
For the last method, how successful was it for keeping you engaged at your desired engagement level?
-
[48]
For the last method, is the workload you felt during the task acceptable?
-
[49]
For the last method, how satisfied are you with how successfully the robot completed the task?
-
[50]
For the last method, how satisfied are you with how the robot interacted with you?
-
[51]
Statistics of User Study Table A1 shows detailed statistics of the user study results
For the last method, how satisfied are you with how in control/agency you felt during the task? H. Statistics of User Study Table A1 shows detailed statistics of the user study results. I. Eye-gaze Analysis The additional eye-gaze analysis is conducted using study videos by estimating head pose (using head direction as a proxy for gaze) and projecting it ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.