Remember what you did?: Learning Behavioral Memories for Partially Observable Object Manipulation
Pith reviewed 2026-06-26 14:20 UTC · model grok-4.3
The pith
CAMP learns a compressed latent memory from a robot's own past actions to succeed at contact-rich manipulation tasks that are only partially observable from vision.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
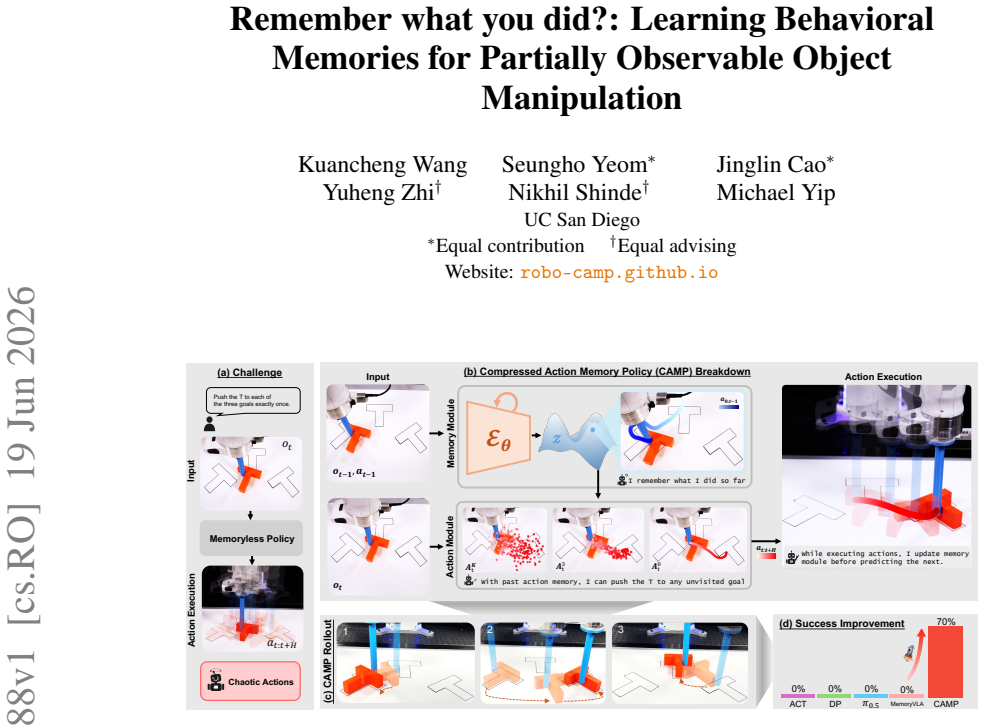
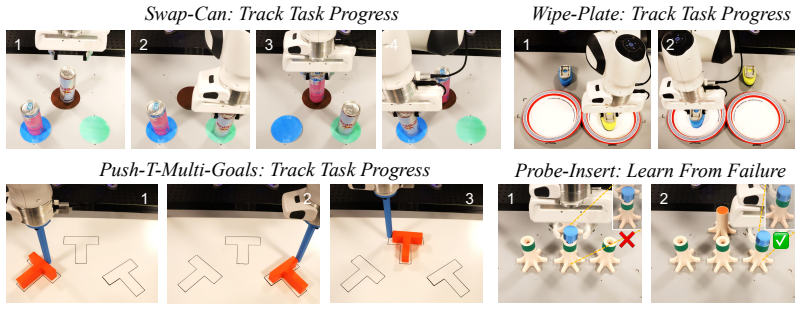
By training a memory module to maintain a compressed representation of past actions, CAMP encodes a latent behavioral memory of all prior interactions that can then be used to better contextualize future actions, allowing the policy to implicitly track generalized task progress and learn from failed attempts without any additional supervision.
What carries the argument
Compressed Action Memory Policy (CAMP), a memory module that compresses the robot's action history into a latent behavioral representation for use in the policy.
If this is right
- Robots can perform long-horizon contact-rich tasks under partial observability without explicit state tracking.
- Learning occurs directly from failed attempts encoded in the action history.
- No external supervision or additional sensors are required beyond the standard action stream.
- The same memory module works across real-robot setups and the introduced simulation benchmarks.
Where Pith is reading between the lines
- The same compression idea could be tested on navigation or assembly tasks where action sequences also encode progress.
- Combining CAMP memory with vision-language-action models might reduce their reliance on long context windows.
- If the latent memory proves task-general, it could serve as a drop-in replacement for recurrent state in other robot learning pipelines.
Load-bearing premise
A robot's own action history is a sufficiently rich self-supervised signal that can be compressed into a latent memory capable of tracking task progress.
What would settle it
CAMP produces no substantial improvement over vision-only baselines on the Memory-T-Bench or Memory-Manip-Bench contact-rich tasks.
Figures

read the original abstract
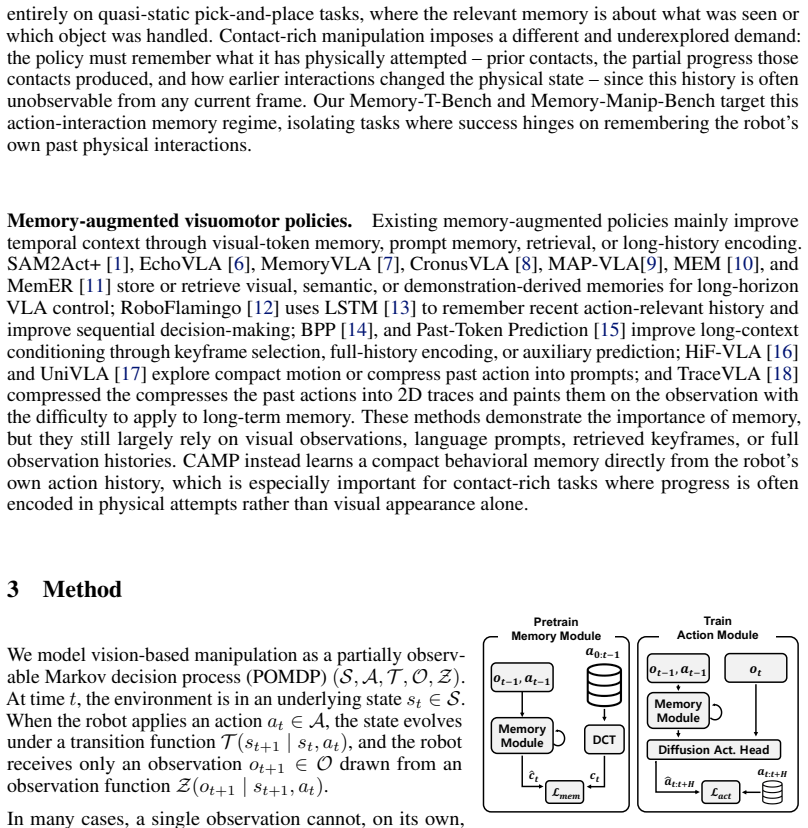
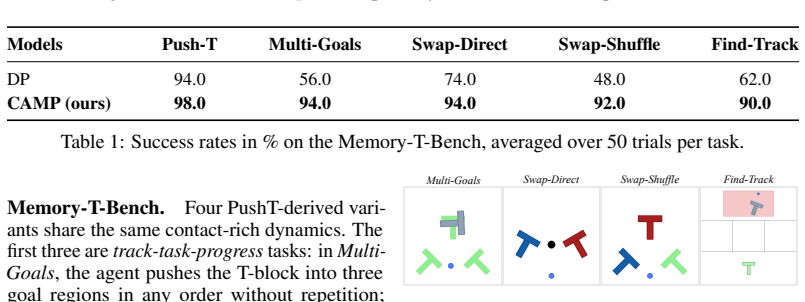
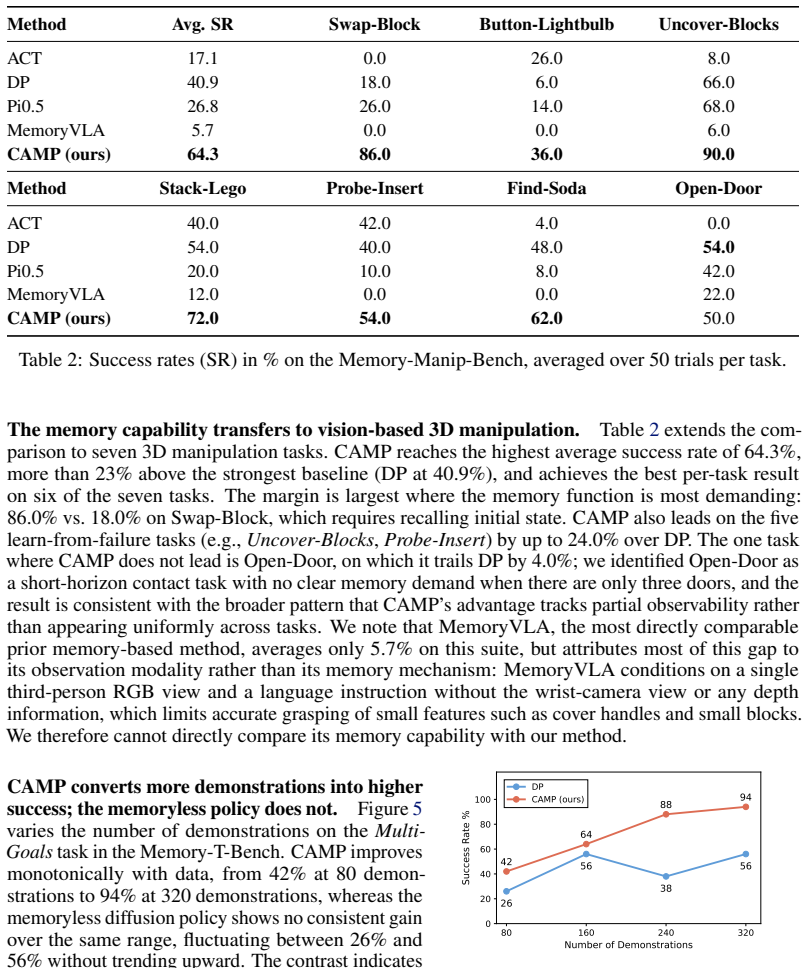
Long horizon, contact-rich manipulation is inherently partially observable. This is as a single visual observation rarely captures a robot's full action context, including prior attempts, interactions, or progress. Consequently, standard visuomotor policies or vision-language-action models are prone to struggle in such tasks due to a lack of memory. To address this, we introduce Compressed Action Memory Policy (CAMP) based on the insight that a robot's own action history serves as a highly informative, self-supervised signal, enabling the policy to learn a robust, compact history representation. In our approach, we train a memory module to maintain a compressed representation of past actions, forcing it to encode a latent behavioral memory of all the robot's past interactions that can then be used to better contextualize future actions. This allows our approach to implicitly track generalized task progress and learn from failed attempts without any additional supervision, or external oversight. We evaluate CAMP across four real-robot setups and two novel simulation benchmarks: Memory-T-Bench and Memory-Manip-Bench. By demonstrating substantial gains over state-of-the-art baselines, CAMP is, to our knowledge, the first policy to demonstrate substantial success on contact-rich partially observable manipulation tasks purely through learned memory.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Compressed Action Memory Policy (CAMP), a visuomotor policy that trains a memory module to compress a robot's action history into a compact latent behavioral memory. This representation is intended to implicitly track task progress and recover from failures in long-horizon, contact-rich, partially observable manipulation without external supervision. The method is evaluated on four real-robot setups plus two new simulation benchmarks (Memory-T-Bench and Memory-Manip-Bench), with the central claim that CAMP achieves substantial gains over state-of-the-art baselines and is the first policy to demonstrate substantial success on such tasks purely through learned memory.
Significance. If the empirical claims hold, the work would be significant for robotics because it supplies a self-supervised mechanism for maintaining behavioral memory in POM settings, potentially reducing reliance on privileged state or additional sensors for contact-rich tasks.
minor comments (2)
- [Abstract] Abstract: the claims of 'substantial gains' and 'substantial success' are stated without any numerical results, baseline names, or task-success metrics; adding at least one quantitative highlight would strengthen the summary.
- [Abstract] The two novel benchmarks (Memory-T-Bench, Memory-Manip-Bench) are introduced but their task definitions, observation spaces, and success criteria are not summarized in the abstract; a brief description would improve accessibility.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our work on Compressed Action Memory Policy (CAMP) and the recommendation for minor revision. The recognition of its potential significance for self-supervised behavioral memory in POM manipulation tasks is appreciated.
Circularity Check
No significant circularity detected
full rationale
The abstract and available context present CAMP as an empirical policy that compresses action history into a latent memory representation for partially observable tasks. No equations, loss functions, architectural derivations, or self-citation chains are supplied that would allow any claimed prediction or uniqueness result to reduce to its own inputs by construction. The central contribution is framed as a training procedure and experimental evaluation on real-robot and simulation benchmarks, with no load-bearing step that equates outputs to fitted parameters or prior self-referential definitions. The derivation chain is therefore self-contained as an architectural and empirical proposal.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
H. Fang, M. Grotz, W. Pumacay, Y . R. Wang, D. Fox, R. Krishna, and J. Duan. Sam2act: Integrating visual foundation model with a memory architecture for robotic manipulation, 2025. URLhttps://arxiv.org/abs/2501.18564
arXiv 2025
-
[2]
Y . Dai, H. Fu, J. Lee, Y . Liu, H. Zhang, J. Yang, C. Finn, N. Fazeli, and J. Chai. Robomme: Benchmarking and understanding memory for robotic generalist policies, 2026. URL https: //arxiv.org/abs/2603.04639
Pith/arXiv arXiv 2026
-
[3]
T. Chen, Y . Wang, M. Li, Y . Qin, H. Shi, Z. Li, Y . Hu, Y . Zhang, K. Wang, Y . Chen, H. Wang, R. Xu, R. Wu, Y . Mu, Y . Yang, H. Dong, and P. Luo. Rmbench: Memory-dependent robotic manipulation benchmark with insights into policy design, 2026. URL https://arxiv.org/ abs/2603.01229
arXiv 2026
-
[4]
E. Cherepanov, N. Kachaev, A. K. Kovalev, and A. I. Panov. Memory, benchmark & robots: A benchmark for solving complex tasks with reinforcement learning, 2026. URL https: //arxiv.org/abs/2502.10550
arXiv 2026
- [5]
-
[6]
M. Lin, X. Liang, B. Lin, L. Jingzhi, Z. Jiao, K. Li, Y . Sun, W. Liufu, Y . Ma, Y . Liu, S. Zhao, Y . Zhuang, and X. Liang. Echovla: Synergistic declarative memory for vla-driven mobile manipulation, 2026. URLhttps://arxiv.org/abs/2511.18112
arXiv 2026
-
[7]
H. Shi, B. Xie, Y . Liu, L. Sun, F. Liu, T. Wang, E. Zhou, H. Fan, X. Zhang, and G. Huang. Memo- ryvla: Perceptual-cognitive memory in vision-language-action models for robotic manipulation,
-
[8]
URLhttps://arxiv.org/abs/2508.19236
-
[9]
H. Li, S. Yang, Y . Chen, X. Chen, X. Yang, Y . Tian, H. Wang, T. Wang, D. Lin, F. Zhao, and J. Pang. Cronusvla: Towards efficient and robust manipulation via multi-frame vision-language- action modeling, 2025. URLhttps://arxiv.org/abs/2506.19816
arXiv 2025
-
[10]
R. Li, W. Guo, Z. Wu, C. Wang, H. Deng, Z. Weng, Y .-P. Tan, and Z. Wang. Map-vla: Memory- augmented prompting for vision-language-action model in robotic manipulation, 2025. URL https://arxiv.org/abs/2511.09516
arXiv 2025
-
[11]
M. Torne, K. Pertsch, H. Walke, K. Vedder, S. Nair, B. Ichter, A. Z. Ren, H. Wang, J. Tang, K. Stachowicz, K. Dhabalia, M. Equi, Q. Vuong, J. T. Springenberg, S. Levine, C. Finn, and D. Driess. Mem: Multi-scale embodied memory for vision language action models, 2026. URL https://arxiv.org/abs/2603.03596
arXiv 2026
-
[12]
A. Sridhar, J. Pan, S. Sharma, and C. Finn. Memer: Scaling up memory for robot control via experience retrieval, 2025. URLhttps://arxiv.org/abs/2510.20328
arXiv 2025
-
[13]
X. Li, M. Liu, H. Zhang, C. Yu, J. Xu, H. Wu, C. Cheang, Y . Jing, W. Zhang, H. Liu, H. Li, and T. Kong. Vision-language foundation models as effective robot imitators, 2024. URL https://arxiv.org/abs/2311.01378
Pith/arXiv arXiv 2024
-
[14]
S. Hochreiter and J. Schmidhuber. Long short-term memory.Neural Computation, 9(8): 1735–1780, Nov 1997. ISSN 0899-7667. doi:10.1162/neco.1997.9.8.1735
-
[15]
M. S. Mark, J. Liang, M. Attarian, C. Fu, D. Dwibedi, D. Shah, and A. Kumar. Bpp: Long- context robot imitation learning by focusing on key history frames, 2026. URL https:// arxiv.org/abs/2602.15010
arXiv 2026
- [16]
-
[17]
M. Lin, P. Ding, S. Wang, Z. Zhuang, Y . Liu, X. Tong, W. Song, S. Lyu, S. Huang, and D. Wang. Hif-vla: Hindsight, insight and foresight through motion representation for vision-language- action models, 2026. URLhttps://arxiv.org/abs/2512.09928. 10
Pith/arXiv arXiv 2026
-
[18]
Q. Bu, Y . Yang, J. Cai, S. Gao, G. Ren, M. Yao, P. Luo, and H. Li. Univla: Learning to act anywhere with task-centric latent actions, 2025. URL https://arxiv.org/abs/2505. 06111
2025
-
[19]
Zheng, Y
R. Zheng, Y . Liang, S. Huang, J. Gao, H. D. III, A. Kolobov, F. Huang, and J. Yang. Tracevla: Visual trace prompting enhances spatial-temporal awareness for generalist robotic policies,
-
[20]
URLhttps://arxiv.org/abs/2412.10345
-
[21]
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song. Diffusion policy: Visuomotor policy learning via action diffusion, 2024. URL https://arxiv.org/ abs/2303.04137
Pith/arXiv arXiv 2024
-
[22]
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn. Learning fine-grained bimanual manipulation with low-cost hardware, 2023. URLhttps://arxiv.org/abs/2304.13705
Pith/arXiv arXiv 2023
-
[23]
P. Intelligence, K. Black, N. Brown, J. Darpinian, K. Dhabalia, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, M. Y . Galliker, D. Ghosh, L. Groom, K. Hausman, B. Ichter, S. Jakubczak, T. Jones, L. Ke, D. LeBlanc, S. Levine, A. Li-Bell, M. Mothukuri, S. Nair, K. Pertsch, A. Z. Ren, L. X. Shi, L. Smith, J. T. Springenberg, K. Stachowicz, J. Tanner, Q. V...
Pith/arXiv arXiv 2025
-
[24]
J. Ho, A. Jain, and P. Abbeel. Denoising diffusion probabilistic models, 2020. URL https: //arxiv.org/abs/2006.11239
Pith/arXiv arXiv 2020
-
[25]
J. Song, C. Meng, and S. Ermon. Denoising diffusion implicit models, 2022. URL https: //arxiv.org/abs/2010.02502
Pith/arXiv arXiv 2022
-
[26]
I. Loshchilov and F. Hutter. Decoupled weight decay regularization, 2019. URL https: //arxiv.org/abs/1711.05101
Pith/arXiv arXiv 2019
-
[27]
W. Peebles and S. Xie. Scalable diffusion models with transformers, 2023. URL https: //arxiv.org/abs/2212.09748. 11 A Training Details A.1 Visuomotor Policies The CAMP, Diffusion Policy (DP), and ACT baselines are trained from scratch independently per task on a single H100 GPU, with the same recipe applied across simulation and real-world tasks. For CAMP...
Pith/arXiv arXiv 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.