Online Learning of Robust Legged Odometry with Minimal Exteroceptive Supervision
Pith reviewed 2026-06-26 14:08 UTC · model grok-4.3
The pith
A neural network learns proprioceptive velocity online under exteroceptive supervision to deliver calibration-free legged odometry that falls back gracefully when external sensors degrade.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
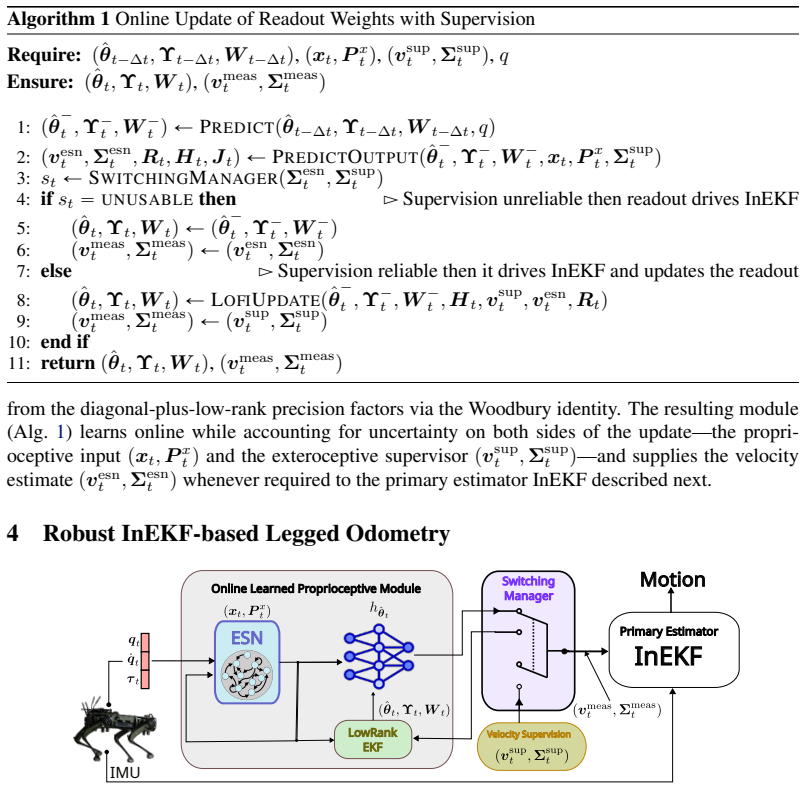
By treating established exteroceptive motion pipelines as a supervisory signal, an online learned velocity neural network can be trained directly from proprioceptive data; the resulting velocity estimates are fused with IMU measurements inside an Invariant EKF to produce odometry that requires neither exteroceptive-to-proprioceptive calibration nor explicit kinematic modeling and that seamlessly reverts to the learned model whenever exteroception becomes unavailable or unreliable.
What carries the argument
The online learned velocity neural network, trained by continuous exteroceptive supervision and fused with IMU data inside an Invariant EKF.
If this is right
- No explicit calibration between exteroceptive and proprioceptive sensors is required.
- Platform-specific kinematic models are unnecessary for the velocity estimator.
- The system switches automatically to the learned proprioceptive velocity when exteroception degrades.
- The same training procedure applies across different quadruped hardware without modification.
Where Pith is reading between the lines
- The method could shorten deployment time for new legged robots by removing per-platform modeling steps.
- Intermittent availability of exteroception during operation might allow continued online refinement of the velocity network.
- Similar supervision patterns could be explored for other proprioceptive quantities such as contact forces.
Load-bearing premise
Exteroceptive motion pipelines must remain accurate enough during training periods to provide reliable supervision for the proprioceptive velocity network.
What would settle it
A measurable increase in position drift on a new quadruped platform after the network has been trained on a different platform, or a sharp accuracy drop once exteroception is removed, would show the learned model does not generalize without calibration.
Figures
read the original abstract
Robust locomotion and navigation for legged robots relies heavily on dependable odometry. Traditional multi-sensor fusion for such state estimation requires meticulous sensor calibration and platform-specific kinematic modeling, which complicates deployment. Industrially packaged exteroceptive sensors can provide accurate motion tracking but remain vulnerable to perceptually degraded conditions. We thus develop a plug-and-play, robust legged odometry system that eliminates the need for explicit exteroceptive-to-proprioceptive calibration or system kinematic modeling. Our approach leverages established exteroceptive motion pipelines as a continuous supervisory signal to train an online learned velocity neural network directly from proprioceptive data. An Invariant EKF (InEKF) is then used to fuse the learned proprioceptive or exteroceptive velocity (if any) and IMU data. When exteroception fails due to environmental degradation, the system seamlessly falls back to using the learned proprioceptive model, yielding a resilient legged odometry that readily adapts to new hardware. We demonstrate the platform-agnostic, easily deployable nature of our approach on different quadruped platforms, showcasing promising results in maintaining robust motion estimation across challenging scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to develop a plug-and-play robust legged odometry system that uses established exteroceptive motion pipelines as continuous supervisory signals to train an online velocity neural network from proprioceptive data, eliminating explicit exteroceptive-to-proprioceptive calibration and kinematic modeling. An InEKF fuses the learned or exteroceptive velocity with IMU data, enabling seamless fallback to the proprioceptive model when exteroception degrades. The approach is demonstrated as platform-agnostic on multiple quadruped platforms in challenging scenarios.
Significance. If the results hold with sufficient validation, the method could lower barriers to deploying legged robots by removing calibration and modeling overhead while improving resilience via learned proprioceptive fallback. The online learning with minimal supervision and InEKF integration represent practical strengths if supported by quantitative evidence of generalization and noise tolerance.
major comments (2)
- [Abstract] The central claim of robustness via fallback to the learned proprioceptive model (Abstract) depends on exteroceptive pipelines supplying sufficiently accurate continuous supervision during online training; no quantitative bounds on acceptable supervision noise, bias, or required convergence time before exteroception removal are provided, leaving the generalization guarantee unverified.
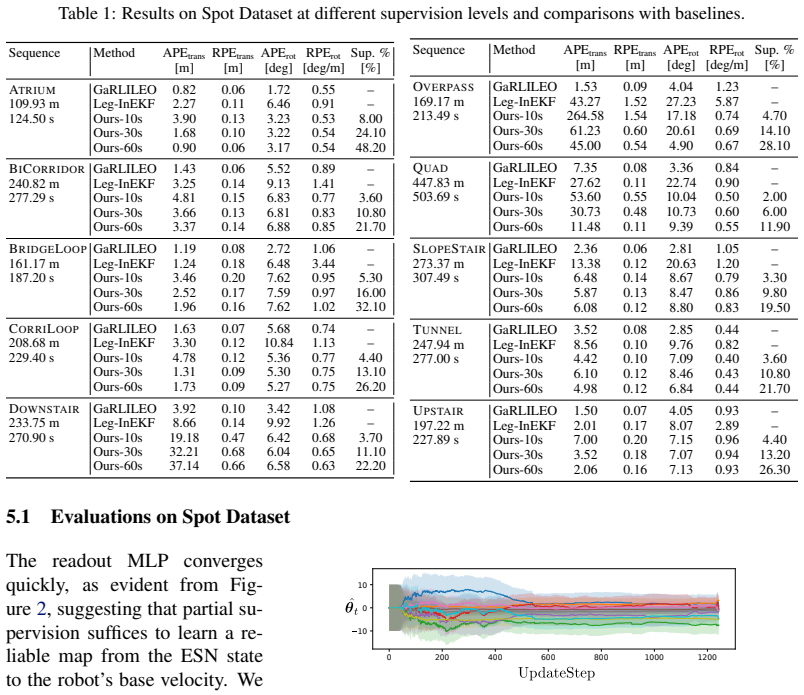
- [Abstract and Experiments] The abstract states 'promising results' on different platforms but provides no error metrics, ablation studies, baseline comparisons, or derivation details for the velocity NN or InEKF; this absence undermines assessment of whether the elimination of calibration and kinematic modeling is achieved without inheriting supervision errors.
minor comments (1)
- [Method] Clarify the precise proprioceptive inputs to the neural network and the exact state representation used in the InEKF fusion step.
Simulated Author's Rebuttal
We thank the referee for their insightful comments, which help us improve the clarity and rigor of our work. We provide point-by-point responses to the major comments and indicate the revisions planned for the manuscript.
read point-by-point responses
-
Referee: [Abstract] The central claim of robustness via fallback to the learned proprioceptive model (Abstract) depends on exteroceptive pipelines supplying sufficiently accurate continuous supervision during online training; no quantitative bounds on acceptable supervision noise, bias, or required convergence time before exteroception removal are provided, leaving the generalization guarantee unverified.
Authors: The manuscript presents empirical evidence of the fallback mechanism's effectiveness through experiments across various platforms and scenarios. However, we agree that providing quantitative bounds would enhance the claims. In the revised version, we will add a subsection analyzing the impact of supervision noise and bias on learning convergence and odometry accuracy, including observed convergence times. revision: yes
-
Referee: [Abstract and Experiments] The abstract states 'promising results' on different platforms but provides no error metrics, ablation studies, baseline comparisons, or derivation details for the velocity NN or InEKF; this absence undermines assessment of whether the elimination of calibration and kinematic modeling is achieved without inheriting supervision errors.
Authors: Detailed error metrics, ablation studies, baseline comparisons, and derivation details are provided in the full manuscript's Experiments and Methods sections. To address the concern, we will update the abstract to include representative quantitative results highlighting the performance and the fact that ablations confirm the approach does not simply inherit supervision errors. revision: yes
Circularity Check
No circularity; supervision is external and derivation is self-contained
full rationale
The paper presents an online learning method that uses established exteroceptive motion pipelines as an external supervisory signal to train a proprioceptive velocity network, followed by InEKF fusion and fallback. No equations, fitted parameters, or self-citations appear in the abstract or description that reduce any claimed result to its own inputs by construction. The approach is a standard supervised learning setup with an independent assumption on supervisor accuracy during training periods; this does not constitute circularity under the defined patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Z. Wu, K. Zheng, Z. Ding, and H. Gao. A survey on legged robots: Advances, tech- nologies and applications.Engineering Applications of Artificial Intelligence, 138:109418,
-
[2]
doi:https://doi.org/10.1016/j.engappai.2024.109418
ISSN 0952-1976. doi:https://doi.org/10.1016/j.engappai.2024.109418. URLhttps: //www.sciencedirect.com/science/article/pii/S0952197624015768
-
[3]
J. Di Carlo, P. M. Wensing, B. Katz, G. Bledt, and S. Kim. Dynamic locomotion in the mit cheetah 3 through convex model-predictive control. In2018 IEEE/RSJ International Confer- ence on Intelligent Robots and Systems (IROS), pages 1–9, 2018. doi:10.1109/IROS.2018. 8594448
-
[4]
A. Kumar, Z. Fu, D. Pathak, and J. Malik. RMA: Rapid Motor Adaptation for Legged Robots. InProceedings of Robotics: Science and Systems, Virtual, July 2021. doi:10.15607/RSS.2021. XVII.011
-
[5]
Y . Peng, C. Chen, K. Wu, and G. Huang. sqrt-vins: Robust and ultrafast square-root filter- based 3d motion tracking.IEEE Transactions on Robotics (TRO), oct 2025. URLhttps: //ieeexplore.ieee.org/document/11219345
arXiv 2025
-
[6]
W. Xu and F. Zhang. Fast-lio: A fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman filter.IEEE Robotics and Automation Letters, 6(2):3317–3324, 2021. doi: 10.1109/LRA.2021.3064227
-
[7]
Furgale, J
P. Furgale, J. Rehder, and R. Siegwart. Unified temporal and spatial calibration for multi-sensor systems. In2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 1280–1286. IEEE, 2013
2013
-
[8]
Rehder, J
J. Rehder, J. Nikolic, T. Schneider, T. Hinzmann, and R. Siegwart. Extending kalibr: Cal- ibrating the extrinsics of multiple imus and of individual axes. In2016 IEEE international conference on robotics and automation (ICRA), pages 4304–4311. IEEE, 2016
2016
-
[9]
Camurri, M
M. Camurri, M. Ramezani, S. Nobili, and M. Fallon. Pronto: A multi-sensor state estimator for legged robots in real-world scenarios.Frontiers in Robotics and AI, 7:68, 2020
2020
-
[10]
a fer, Andrew Wing Keung To, Kuan-Ho Lao, Murat Cubuktepe, Matthew Haley, Peter B \
C. Burgul, W. Lee, P. Geneva, and G. Huang. Online determination of legged kinematics. In2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 9043–9049, 2024. doi:10.1109/IROS58592.2024.10801595
- [11]
-
[12]
In: 2023 IEEE International Conference on Robotics and Automation (ICRA), pp
V . Dh´edin, H. Li, S. Khorshidi, L. Mack, A. K. C. Ravi, A. Meduri, P. Shah, F. Grimminger, L. Righetti, M. Khadiv, and J. Stueckler. Visual-inertial and leg odometry fusion for dynamic locomotion. InProceedings of the IEEE International Conference on Robotics and Automa- tion, pages 9966–9972, 2023. doi:10.1109/ICRA48891.2023.10160898
-
[13]
R. Hartley, M. Ghaffari, R. M. Eustice, and J. W. Grizzle. Contact-aided invariant extended kalman filtering for robot state estimation.The International Journal of Robotics Research, 39(4):402–430, 2020. doi:10.1177/0278364919894385. URLhttps://doi.org/10.1177/ 0278364919894385
-
[14]
T.-Y . Lin, R. Zhang, J. Yu, and M. Ghaffari. Legged robot state estimation using invari- ant kalman filtering and learned contact events. InProceedings of the 5th Conference on Robot Learning, volume 164 ofProceedings of Machine Learning Research, pages 1057–
-
[15]
URLhttps://proceedings.mlr.press/v164/lin22b.html
PMLR, 2022. URLhttps://proceedings.mlr.press/v164/lin22b.html. 9
2022
-
[16]
Buchanan, M
R. Buchanan, M. Camurri, F. Dellaert, and M. Fallon. Learning inertial odometry for dynamic legged robot state estimation. InProceedings of the 5th Conference on Robot Learning, volume 164 ofProceedings of Machine Learning Research, pages 1575–1584. PMLR, 2022. URL https://proceedings.mlr.press/v164/buchanan22a.html
2022
-
[17]
Wasserman, A
J. Wasserman, A. Agarwal, R. Jangir, G. Chowdhary, D. Pathak, and A. Gupta. Legolas: Deep leg-inertial odometry. InProceedings of the 8th Conference on Robot Learning, volume 270 ofProceedings of Machine Learning Research, pages 2928–2947. PMLR, 2025. URL https://proceedings.mlr.press/v270/wasserman25a.html
2025
-
[18]
A. M. Kulkarni, I. Poulakakis, and G. Huang. Learning neural observer-predictor models for limb-level sampling-based locomotion planning, 2025. URLhttps://arxiv.org/abs/ 2510.22789
arXiv 2025
-
[19]
T. Lesort, V . Lomonaco, A. Stoian, D. Maltoni, D. Filliat, and N. D ´ıaz-Rodr´ıguez. Continual learning for robotics: Definition, framework, learning strategies, opportunities and challenges. Inf. Fusion, 58(C):52–68, June 2020. ISSN 1566-2535. doi:10.1016/j.inffus.2019.12.004. URLhttps://doi.org/10.1016/j.inffus.2019.12.004
-
[20]
Klanke, S
S. Klanke, S. Vijayakumar, and S. Schaal. A library for locally weighted projection regres- sion.Journal of Machine Learning Research, 9(21):623–626, 2008. URLhttp://jmlr. org/papers/v9/klanke08a.html
2008
-
[21]
Nguyen-tuong, J
D. Nguyen-tuong, J. Peters, and M. Seeger. Local gaussian process regression for real time online model learning. In D. Koller, D. Schuurmans, Y . Bengio, and L. Bot- tou, editors,Advances in Neural Information Processing Systems, volume 21. Curran As- sociates, Inc., 2008. URLhttps://proceedings.neurips.cc/paper_files/paper/ 2008/file/01161aaa0b6d1345dd8...
2008
-
[22]
T. Z. Jiahao, K. Y . Chee, and M. A. Hsieh. Online dynamics learning for predictive control with an application to aerial robots. In6th Annual Conference on Robot Learning, 2022. URL https://openreview.net/forum?id=8-8e18idYLD
2022
-
[23]
T. Okawara, K. Koide, S. Oishi, M. Yokozuka, A. Banno, K. Uno, and K. Yoshida. Tightly- coupled lidar-imu-wheel odometry with an online neural kinematic model learning via factor graph optimization.Robotics and Autonomous Systems, 187:104929, 2025. ISSN 0921-8890. doi:https://doi.org/10.1016/j.robot.2025.104929. URLhttps://www.sciencedirect.com/ science/a...
-
[24]
Tanaka, T
G. Tanaka, T. Yamane, J. B. H ´eroux, R. Nakane, N. Kanazawa, S. Takeda, H. Numata, D. Nakano, and A. Hirose. Recent advances in physical reservoir computing: A re- view.Neural Networks, 115:100–123, 2019. ISSN 0893-6080. doi:https://doi.org/10.1016/ j.neunet.2019.03.005. URLhttps://www.sciencedirect.com/science/article/pii/ S0893608019300784
2019
-
[25]
Kim and A
S. Kim and A. Billard. Estimating the non-linear dynamics of free-flying objects.Robotics and Autonomous Systems, 60(9):1108–1122, 2012. ISSN 0921-8890. doi:https://doi.org/10. 1016/j.robot.2012.05.022. URLhttps://www.sciencedirect.com/science/article/ pii/S092188901200084X
2012
-
[26]
A. S. Polydoros and L. Nalpantidis. A reservoir computing approach for learning forward dy- namics of industrial manipulators. In2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 612–618, 2016. doi:10.1109/IROS.2016.7759116
-
[27]
M. Folgheraiter, A. Yskak, and S. Yessirkepov. One-shot bipedal robot dynamics identification with a reservoir-based rnn.IEEE Access, 11:50180–50194, 2023. doi:10.1109/ACCESS.2023. 3277977. 10
-
[28]
M. Luko ˇseviˇcius and H. Jaeger. Reservoir computing approaches to recurrent neural net- work training.Computer Science Review, 3(3):127–149, 2009. ISSN 1574-0137. doi:https:// doi.org/10.1016/j.cosrev.2009.03.005. URLhttps://www.sciencedirect.com/science/ article/pii/S1574013709000173
-
[29]
Singhal and L
S. Singhal and L. Wu. Training multilayer perceptrons with the extended kalman al- gorithm. In D. Touretzky, editor,Advances in Neural Information Processing Systems, volume 1. Morgan-Kaufmann, 1988. URLhttps://proceedings.neurips.cc/paper_ files/paper/1988/file/38b3eff8baf56627478ec76a704e9b52-Paper.pdf
1988
-
[30]
G. Puskorius and L. Feldkamp. Decoupled extended kalman filter training of feedforward layered networks. InIJCNN-91-Seattle International Joint Conference on Neural Networks, volume i, pages 771–777 vol.1, 1991. doi:10.1109/IJCNN.1991.155276
-
[31]
P. G. Chang, G. Dur ´an-Mart´ın, A. Shestopaloff, M. Jones, and K. P. Murphy. Low-rank ex- tended kalman filtering for online learning of neural networks from streaming data. InConfer- ence on Lifelong Learning Agents, pages 1025–1071. PMLR, 2023
2023
-
[32]
C. Sun, M. Song, D. Cai, B. Zhang, S. Hong, and H. Li. A systematic review of echo state networks from design to application.IEEE Transactions on Artificial Intelligence, 5(1):23–37,
-
[33]
doi:10.1109/TAI.2022.3225780
-
[34]
A. Hart, J. Hook, and J. Dawes. Embedding and approximation theorems for echo state net- works.Neural Networks, 128:234–247, 2020. ISSN 0893-6080. doi:https://doi.org/10.1016/ j.neunet.2020.05.013. URLhttps://www.sciencedirect.com/science/article/pii/ S0893608020301830
2020
-
[35]
Paszke, S
A. Paszke, S. Gross, F. Massa, A. Lerer, J. Bradbury, G. Chanan, T. Killeen, Z. Lin, N. Gimelshein, L. Antiga, A. Desmaison, A. Kopf, E. Yang, Z. DeVito, M. Raison, A. Te- jani, S. Chilamkurthy, B. Steiner, L. Fang, J. Bai, and S. Chintala. Pytorch: An imperative style, high-performance deep learning library. InAdvances in Neural Information Processing Sy...
2019
-
[36]
K. Wang, F. Cuzzolin, K. Shariatmadar, D. Moens, and H. Hallez. A Review of Uncer- tainty Representation and Quantification in Neural Networks .IEEE Transactions on Pat- tern Analysis & Machine Intelligence, 48(03):2476–2495, Mar. 2026. ISSN 1939-3539. doi:10.1109/TPAMI.2025.3626645. URLhttps://doi.ieeecomputersociety.org/10. 1109/TPAMI.2025.3626645
-
[37]
H. Song, M. Kim, D. Park, Y . Shin, and J.-G. Lee. Learning from noisy labels with deep neural networks: A survey.IEEE Transactions on Neural Networks and Learning Systems, 2022
2022
-
[38]
Rolnick, A
D. Rolnick, A. Ahuja, J. Schwarz, T. Lillicrap, and G. Wayne. Experience replay for con- tinual learning. In H. Wallach, H. Larochelle, A. Beygelzimer, F. d'Alch ´e-Buc, E. Fox, and R. Garnett, editors,Advances in Neural Information Processing Systems, volume 32. Curran Associates, Inc., 2019. URLhttps://proceedings.neurips.cc/paper_files/paper/ 2019/file...
2019
-
[39]
S. Lee, H.-B. Kim, and K.-S. Kim. Legged robot state estimation using invariant neural- augmented kalman filter with a neural compensator. In2025 IEEE/RSJ International Con- ference on Intelligent Robots and Systems (IROS), pages 15445–15452, 2025. doi:10.1109/ IROS60139.2025.11247668
arXiv 2025
-
[40]
In: 2023 IEEE International Conference on Robotics and Automation (ICRA), pp
B. Joshi, H. Damron, S. Rahman, and I. Rekleitis. Sm/vio: Robust underwater state es- timation switching between model-based and visual inertial odometry. In2023 IEEE In- ternational Conference on Robotics and Automation (ICRA), pages 5192–5199, 2023. doi: 10.1109/ICRA48891.2023.10161407. 11
-
[41]
C. Noh, S. Jung, H. Kim, Y . Hu, L. Herlant, and A. Kim. Garlileo: Gravity-aligned radar-leg- inertial enhanced odometry, 2025. URLhttps://arxiv.org/abs/2511.13216. Appendices A Switching Manager The system health monitor computes a normalized health scoreHP r0,1sas a weighted combina- tion of MSCKF feature quality, SLAM feature quality, and covariance qu...
arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.