A Pre-Dispatch Resonance Safety Criterion for AI Training Clusters
Pith reviewed 2026-06-26 11:43 UTC · model grok-4.3
The pith
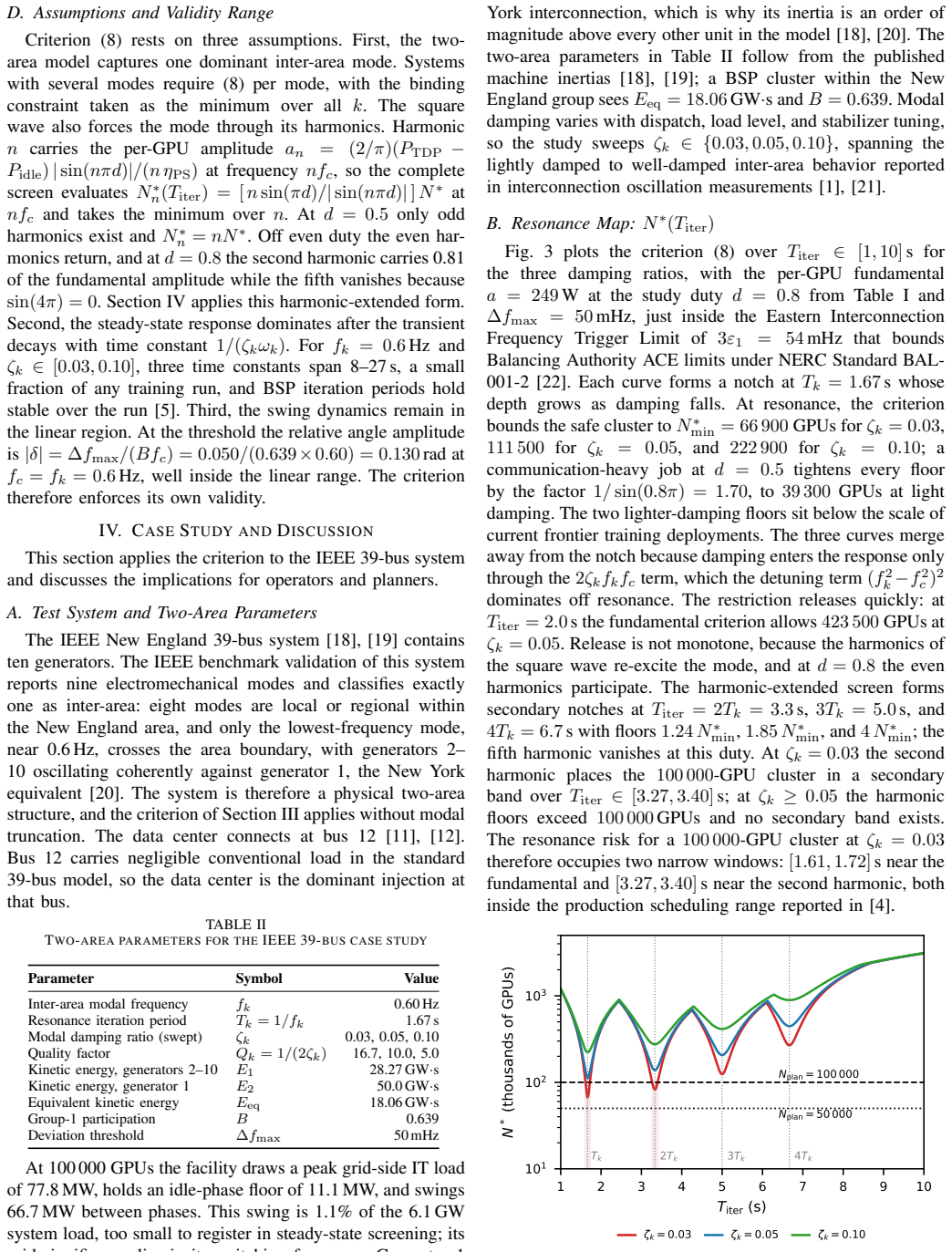
A closed-form criterion derived from swing equations bounds the maximum size of AI training clusters to prevent resonance with grid modes.
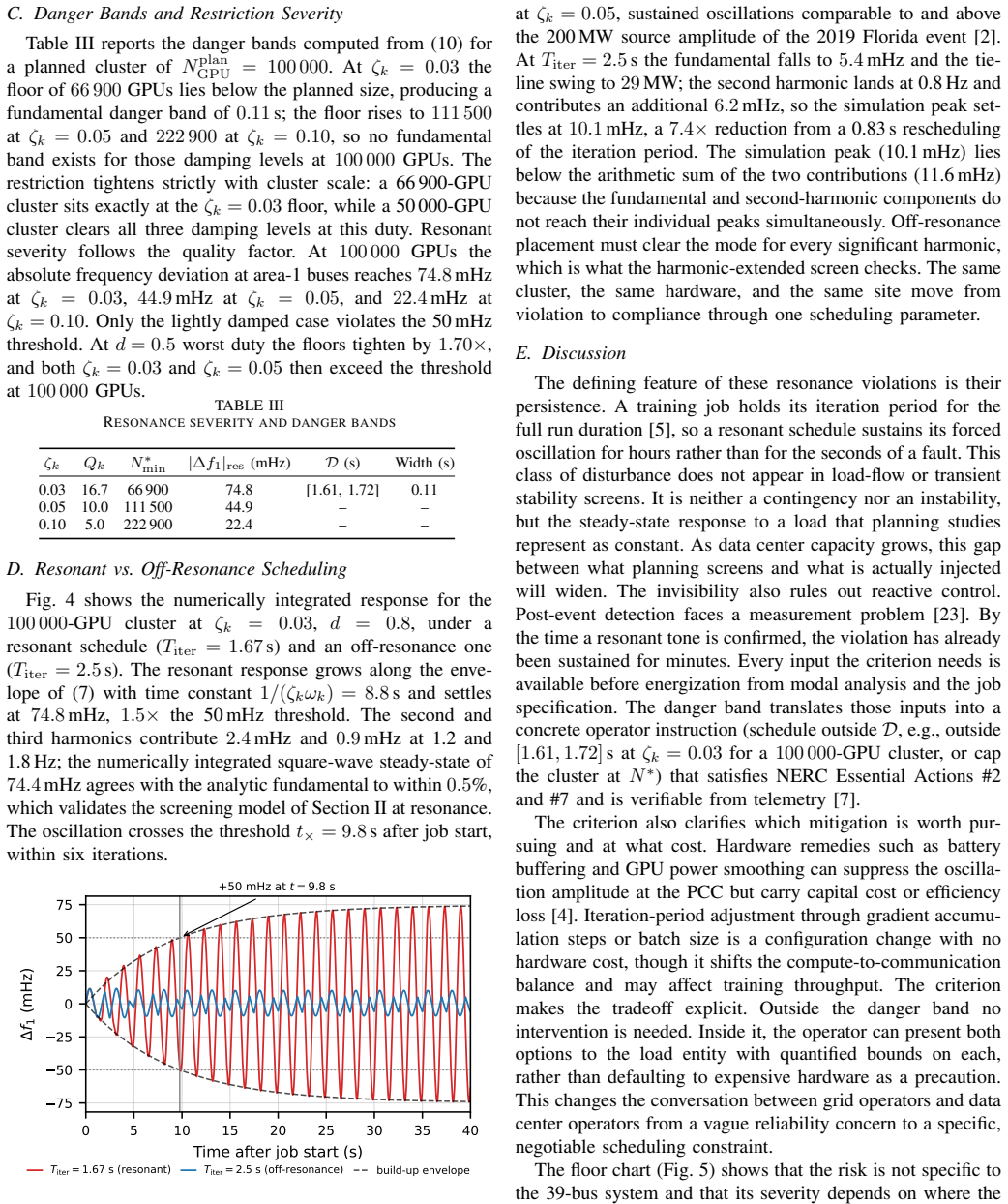
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
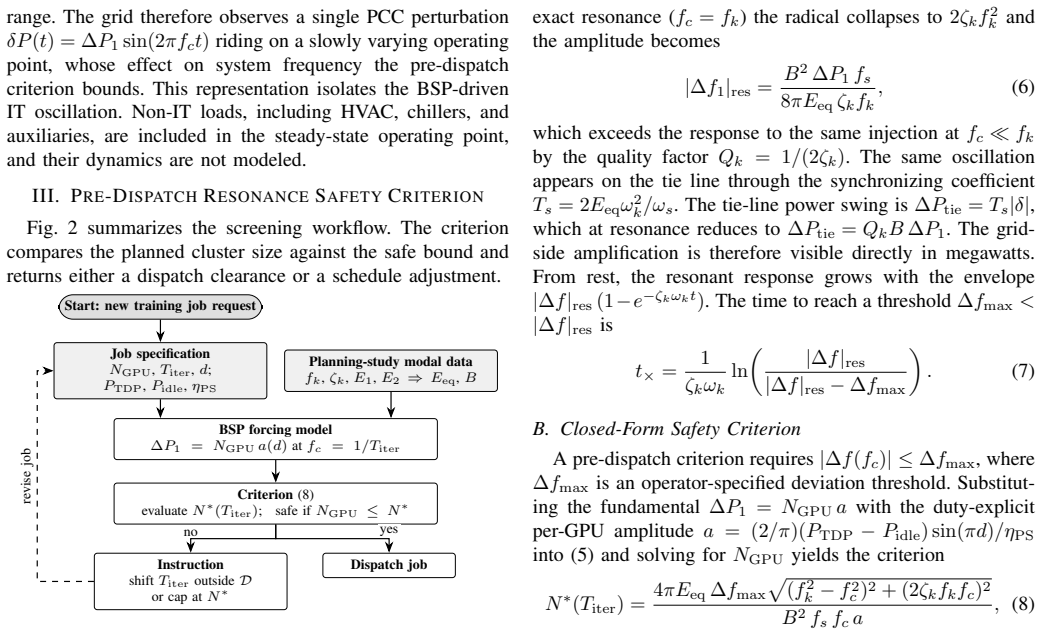
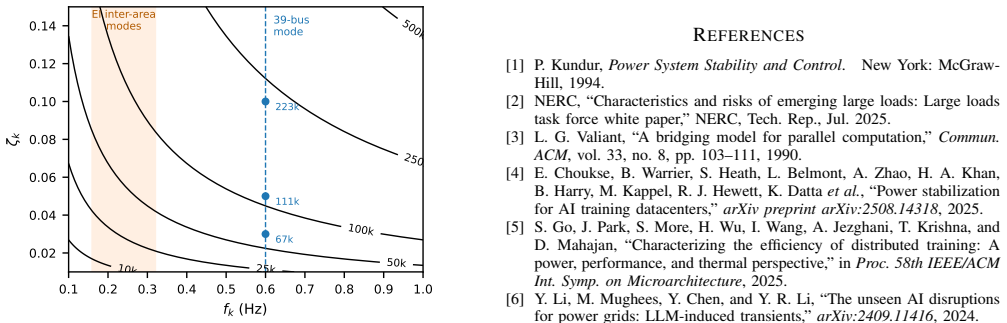
The paper derives a closed-form pre-dispatch safety criterion by inverting the steady-state forced two-area swing equations. The criterion bounds the maximum cluster size a grid can absorb at any iteration period, defines danger bands, extends to square-wave harmonics, and parameterizes the response from eigenanalysis and GPU specifications. When applied to the IEEE 39-bus system at a representative duty cycle, it yields a maximum safe cluster of 66,900 GPUs at resonance under light damping, with rescheduling away from resonance reducing deviation by 7.4 times.
What carries the argument
The inverted steady-state forced two-area swing equations, which map cluster power amplitude and modal damping to steady-state angle or voltage deviation bounds.
If this is right
- Iteration period selection becomes a grid-safety control variable.
- Small changes in schedule timing can substantially reduce mode excitation.
- The criterion supplies an analytic screening method for large periodic loads.
- Harmonic components of the square wave must be checked in addition to the fundamental.
Where Pith is reading between the lines
- Job schedulers in AI clusters could incorporate grid frequency data to avoid resonant periods.
- The approach may extend to other synchronous large loads such as cryptocurrency mining farms.
- Validation against full-scale interconnection models would strengthen the two-area approximation.
Load-bearing premise
The aggregate power draw of the training cluster follows an exact square wave at the iteration period, and the two-area model with planning-study parameters adequately captures the relevant inter-area modes.
What would settle it
Direct measurement of power consumption waveform from an operating hyperscale training cluster or field recording of inter-area mode response exceeding the predicted steady-state deviation for a known cluster size.
Figures
read the original abstract
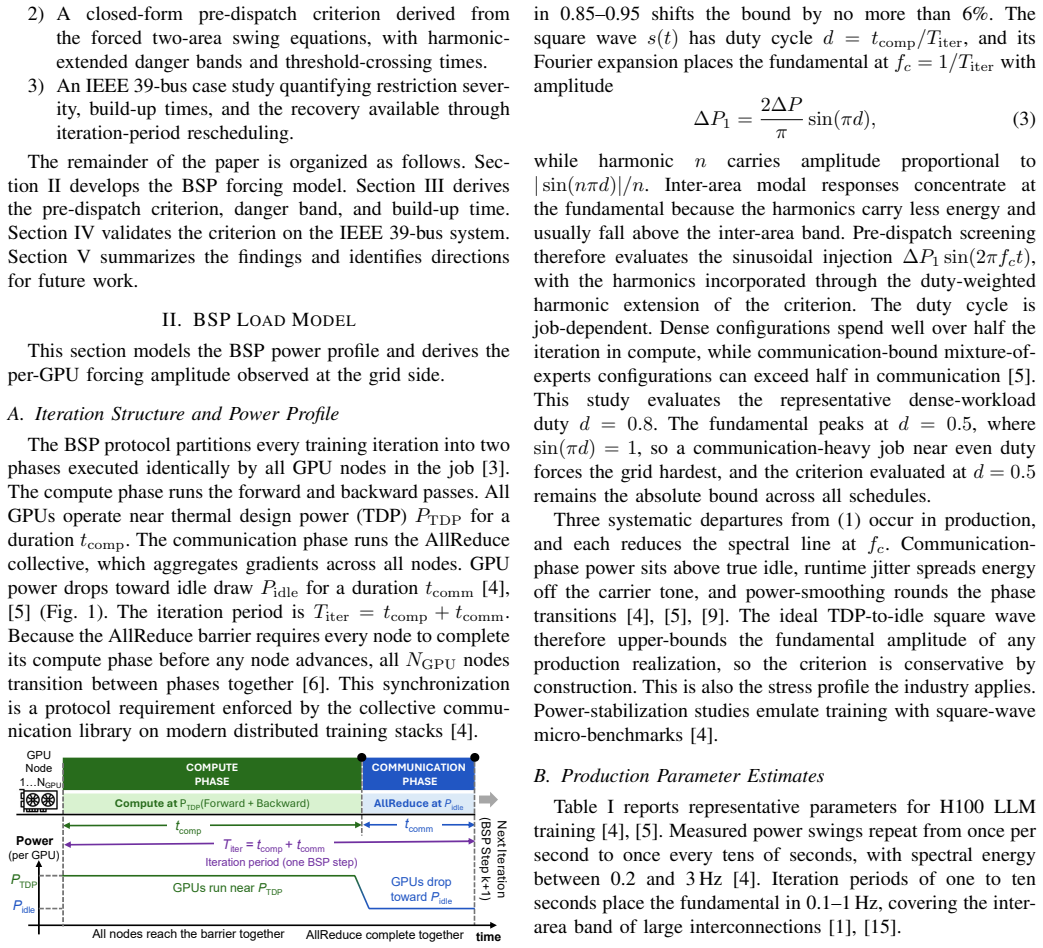
Hyperscale AI training clusters operate under the Bulk Synchronous Parallel protocol, which impose a periodic power swing on the transmission grid. Every GPU in the job transitions between compute and idle in lockstep, so the aggregate power traces a square wave at the training iteration period. Production iteration periods of one to ten seconds place the forcing frequency within the inter-area electromechanical mode band of large interconnections, where a training schedule can drive a mode at resonance. This paper derives a closed-form pre-dispatch safety criterion that bounds the maximum cluster size a grid can absorb at any proposed iteration period. The derivation inverts the steady-state forced two-area swing equations. The criterion defines a danger band of iteration periods, extends to the square-wave harmonics, and parameterizes the modal response from planning-study eigenanalysis and the forcing amplitude from GPU specifications. Applied to the IEEE 39-bus system at a production-representative duty cycle, the criterion shows that the maximum safe cluster at resonance is $66\,900$ GPUs under light damping. Rescheduling the same job less than one second away from resonance reduces the deviation $7.4\times$ with no hardware change. These results establish the training iteration period as a controllable grid-safety parameter and supply the analytic screening tool that reliability directives on current large loads lack.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper derives a closed-form pre-dispatch safety criterion bounding the maximum size of an AI training cluster (under Bulk Synchronous Parallel scheduling) that a grid can absorb without driving inter-area electromechanical modes into resonance. The derivation inverts the steady-state forced response of the two-area swing equations, with modal parameters taken from planning-study eigenanalysis and forcing amplitude from GPU power specifications; the criterion identifies a danger band of iteration periods (one to ten seconds), extends to square-wave harmonics, and is applied to the IEEE 39-bus system to obtain a maximum safe cluster of 66,900 GPUs at resonance under light damping, with a 7.4× reduction in deviation obtained by rescheduling the iteration period less than one second away from resonance.
Significance. If the reduced-order model is shown to be representative, the work supplies an analytic screening tool that treats the training iteration period as a controllable grid-safety parameter, addressing a gap in current reliability directives for large periodic loads. The closed-form nature and use of standard test systems and externally sourced modal data are strengths that could enable rapid pre-dispatch screening.
major comments (2)
- [Abstract / derivation] Abstract and derivation: the central bound (66,900 GPUs) and 7.4× rescheduling claim rest on the two-area swing model plus planning-study eigenanalysis being sufficient to predict forced-oscillation amplitude at the cluster bus; the IEEE 39-bus system is a multi-machine network whose inter-area modes have location-dependent participation factors and observability that a two-area reduction cannot capture, so the criterion may not bound the actual response when the cluster is electrically distant from the mode shape.
- [Abstract] Abstract: the forcing is taken as an ideal square wave whose amplitude is set directly from GPU specifications; no error analysis or sensitivity to deviations from perfect square-wave behavior (e.g., stochastic compute/idle timing jitter within an iteration) is supplied, yet this directly scales the steady-state response amplitude used to obtain the safety bound.
minor comments (2)
- [Abstract] The abstract states that a derivation exists and reports numerical results but does not display the inverted closed-form expression or the definition of the danger band; including the key equation would improve readability.
- No table or figure caption clarifies how the 7.4× factor is computed (e.g., which damping ratio, which harmonic, exact frequency offset); a small table of sensitivity cases would help.
Simulated Author's Rebuttal
We thank the referee for these detailed comments on the modeling assumptions. We respond to each major comment below, indicating planned revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract / derivation] Abstract and derivation: the central bound (66,900 GPUs) and 7.4× rescheduling claim rest on the two-area swing model plus planning-study eigenanalysis being sufficient to predict forced-oscillation amplitude at the cluster bus; the IEEE 39-bus system is a multi-machine network whose inter-area modes have location-dependent participation factors and observability that a two-area reduction cannot capture, so the criterion may not bound the actual response when the cluster is electrically distant from the mode shape.
Authors: The two-area swing equations are inverted to obtain the closed-form safety criterion, which is a deliberate modeling choice to yield an analytic pre-dispatch tool rather than a full-order simulation. Modal parameters (frequency, damping ratio, and mode shape) are taken directly from eigenanalysis of the complete IEEE 39-bus system, so the forcing amplitude is scaled by the participation at the cluster bus. We agree that a two-area reduction does not fully capture all location-dependent observability effects in a multi-machine network. We will revise the manuscript to state this limitation explicitly, emphasize that the criterion is intended as a conservative screening bound, and note that full dynamic simulation remains necessary for final validation at a specific bus. revision: partial
-
Referee: [Abstract] Abstract: the forcing is taken as an ideal square wave whose amplitude is set directly from GPU specifications; no error analysis or sensitivity to deviations from perfect square-wave behavior (e.g., stochastic compute/idle timing jitter within an iteration) is supplied, yet this directly scales the steady-state response amplitude used to obtain the safety bound.
Authors: The square-wave model follows directly from the deterministic Bulk Synchronous Parallel protocol described in the literature, with amplitude set from published GPU power traces. We did not perform a stochastic jitter analysis because the paper focuses on the periodic component that can drive resonance. We accept that real timing variations would alter the harmonic spectrum and could reduce peak amplitude at exact resonance. We will add a brief sensitivity study (new subsection or appendix) quantifying the effect of representative jitter levels on the steady-state response. revision: yes
Circularity Check
No circularity: derivation inverts external two-area swing model with independent planning-study parameters and GPU specs
full rationale
The paper's central derivation inverts the steady-state forced response of the standard two-area swing equations, taking modal parameters directly from external planning-study eigenanalysis and forcing amplitude from GPU power specifications. These are independent inputs rather than quantities fitted or defined inside the paper. No self-citations, self-definitional steps, fitted-input predictions, or ansatz smuggling are present in the abstract or derivation description. The result (e.g., 66,900 GPU bound) is a direct algebraic consequence of those external parameters and the inversion, not a renaming or tautology. This is the most common honest non-finding for model-based screening criteria.
Axiom & Free-Parameter Ledger
free parameters (2)
- modal response parameters
- forcing amplitude
axioms (2)
- domain assumption Aggregate cluster power follows a square wave at the iteration period
- standard math Steady-state forced response of the two-area swing equations governs the deviation
Reference graph
Works this paper leans on
-
[1]
Kundur,Power System Stability and Control
P. Kundur,Power System Stability and Control. New York: McGraw- Hill, 1994
1994
-
[2]
Characteristics and risks of emerging large loads: Large loads task force white paper,
NERC, “Characteristics and risks of emerging large loads: Large loads task force white paper,” NERC, Tech. Rep., Jul. 2025
2025
-
[3]
A bridging model for parallel computation,
L. G. Valiant, “A bridging model for parallel computation,”Commun. ACM, vol. 33, no. 8, pp. 103–111, 1990
1990
-
[4]
Power stabilization for AI training datacenters,
E. Choukse, B. Warrier, S. Heath, L. Belmont, A. Zhao, H. A. Khan, B. Harry, M. Kappel, R. J. Hewett, K. Dattaet al., “Power stabilization for AI training datacenters,”arXiv preprint arXiv:2508.14318, 2025
arXiv 2025
-
[5]
Characterizing the efficiency of distributed training: A power, performance, and thermal perspective,
S. Go, J. Park, S. More, H. Wu, I. Wang, A. Jezghani, T. Krishna, and D. Mahajan, “Characterizing the efficiency of distributed training: A power, performance, and thermal perspective,” inProc. 58th IEEE/ACM Int. Symp. on Microarchitecture, 2025
2025
-
[6]
The unseen AI disruptions for power grids: LLM-induced transients,
Y . Li, M. Mughees, Y . Chen, and Y . R. Li, “The unseen AI disruptions for power grids: LLM-induced transients,”arXiv:2409.11416, 2024
arXiv 2024
-
[7]
Essential action to industry: Computational load modeling, studies, instrumentation, commissioning, operations, protection, and control,
NERC, “Essential action to industry: Computational load modeling, studies, instrumentation, commissioning, operations, protection, and control,” NERC, Level 3 NERC Alert, May 2026
2026
-
[8]
Industry recommendation: Large load interconnection, study, commissioning, and operations,
NERC, “Industry recommendation: Large load interconnection, study, commissioning, and operations,” North American Electric Reliability Corporation, Level 2 NERC Alert, Sep. 2025
2025
-
[9]
Wide-area power system oscillations from large- scale AI workloads,
M.-S. Ko and H. Zhu, “Wide-area power system oscillations from large- scale AI workloads,”IEEE Transactions on Power Systems, pp. 1–14, 2026
2026
-
[10]
K.-B. Kwon, S. Mukherjee, and V . Adetola, “Operational risks in grid integration of large data center loads: Characteristics, stability assessments, and sensitivity studies,”arXiv:2510.05437, 2025
arXiv 2025
-
[11]
Spatial load correlation in AI data-center-dominated power systems,
C. Chaudhary, A. Abdelkader, Y . Pei, M. Ben-Idris, and J. Mitra, “Spatial load correlation in AI data-center-dominated power systems,” in Proc. 2026 IEEE Power & Energy Society General Meeting (PES GM), Montr´eal, QC, Canada, Jul. 2026, preprint: https://doi.org/10.13140/RG. 2.2.28516.13442
work page doi:10.13140/rg 2026
-
[12]
Modal analysis of spatial load correlation in AI data center- dominated power systems,
C. Chaudhary, M. Murillo, M. Ben-Idris, J. Mitra, D. Pandit, and A. Bera, “Modal analysis of spatial load correlation in AI data center- dominated power systems,” inProc. IEEE Int. Conf. on Smart Energy Systems and Technologies (SEST), September 2026, preprint: https: //doi.org/10.13140/RG.2.2.17610.94404
-
[13]
The foundations of locale theory
C. Chaudhary, A. Abdelkader, M. Ben-Idris, and J. Mitra, “Resource adequacy risk in correlated large loads,” inProc. IEEE Int. Conf. on Probabilistic Methods Applied to Power Systems (PMAPS), Salt Lake City, UT, USA, Sep. 2026, preprint: https://doi.org/10.13140/RG.2.2. 35227.02087
-
[14]
Data center power equipment thermal guidelines and best practices,
ASHRAE Technical Committee 9.9, “Data center power equipment thermal guidelines and best practices,” ASHRAE, Tech. Rep., 2016
2016
-
[15]
Rogers,Power System Oscillations
G. Rogers,Power System Oscillations. Boston, MA: Kluwer Academic Publishers, 2000
2000
-
[16]
Impact of data center load modeling on power system stability,
C. Chaudhary, A. Abdelkader, M. Egan, E. Udren, M. Ben-Idris, and J. Mitra, “Impact of data center load modeling on power system stability,” inGrid of the Future Symposium, ser. CIGRE US, Denver, Colorado, USA, Nov. 2025
2025
-
[17]
Understanding the inception of 14.7 Hz oscillations emerging from a data center,
C. Mishra, L. Vanfretti, J. Delaree Jr., T. J. Purcell, and K. D. Jones, “Understanding the inception of 14.7 Hz oscillations emerging from a data center,”Sustainable Energy, Grids and Networks, vol. 43, p. 101735, 2025
2025
-
[18]
A practical method for the direct analysis of transient stability,
T. Athay, R. Podmore, and S. Virmani, “A practical method for the direct analysis of transient stability,”IEEE Trans. Power App. Syst., vol. PAS-98, no. 2, pp. 573–584, 1979
1979
-
[19]
M. A. Pai,Energy Function Analysis for Power System Stability. Boston, MA: Kluwer Academic Publishers, 1989
1989
-
[20]
Bench- mark models for the analysis and control of small-signal oscillatory dynamics in power systems,
C. Canizares, T. Fernandes, E. Geraldi, L. Gerin-Lajoie, M. Gibbard, I. Hiskens, J. Kersulis, R. Kuiava, L. Lima, F. DeMarcoet al., “Bench- mark models for the analysis and control of small-signal oscillatory dynamics in power systems,”IEEE Transactions on Power Systems, vol. 32, no. 1, pp. 715–722, 2016
2016
-
[21]
Interconnection oscillation analysis: Reliability assessment,
NERC, “Interconnection oscillation analysis: Reliability assessment,” North American Electric Reliability Corporation, Tech. Rep., 2019
2019
-
[22]
Standard BAL-001-2: Real power balancing control perfor- mance,
NERC, “Standard BAL-001-2: Real power balancing control perfor- mance,” NERC, NERC Reliability Standard, 2015
2015
-
[23]
Measurement adequacy for monitoring data center oscillations,
K. Chatterjee, J. D. Follum, A. Varghese, S. Biswas, E. Farantatos, and L. Zhu, “Measurement adequacy for monitoring data center oscillations,” Pacific Northwest National Laboratory, Tech. Rep., 2026
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.