Durability-Aware Multi-Objective Optimization of the Jansen Linkage: Trading Gait Quality Against Joint Wear
Pith reviewed 2026-06-26 11:48 UTC · model grok-4.3
The pith
The classical Jansen linkage is Pareto-dominated by length-adjusted versions that cut joint wear by 56 percent while flattening stance and smoothing velocity.
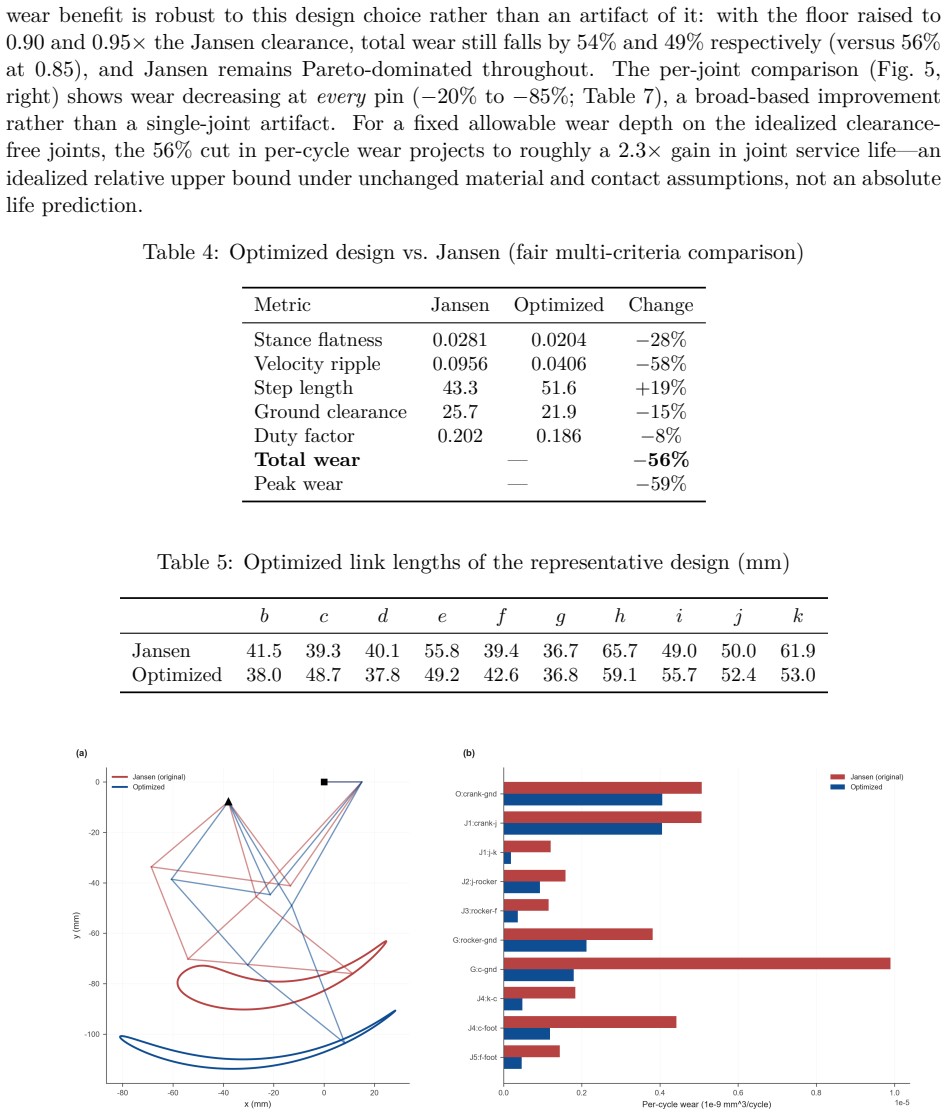
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
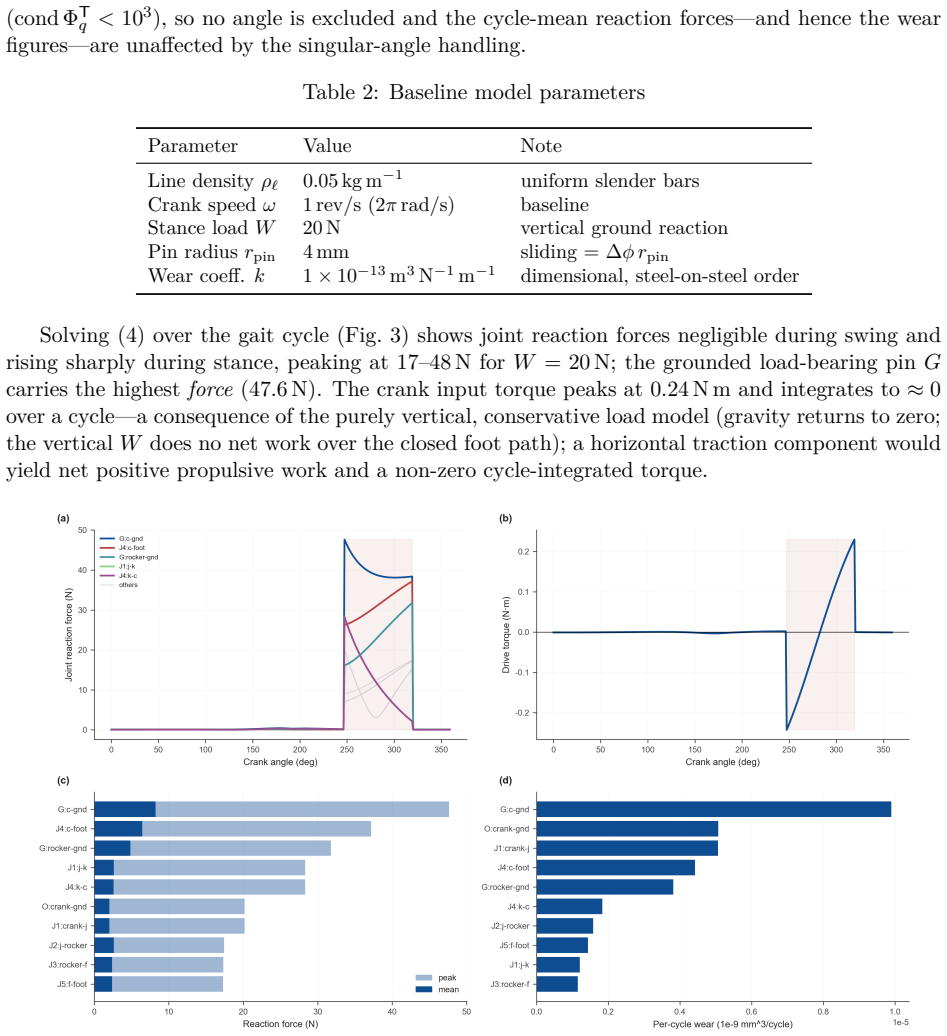
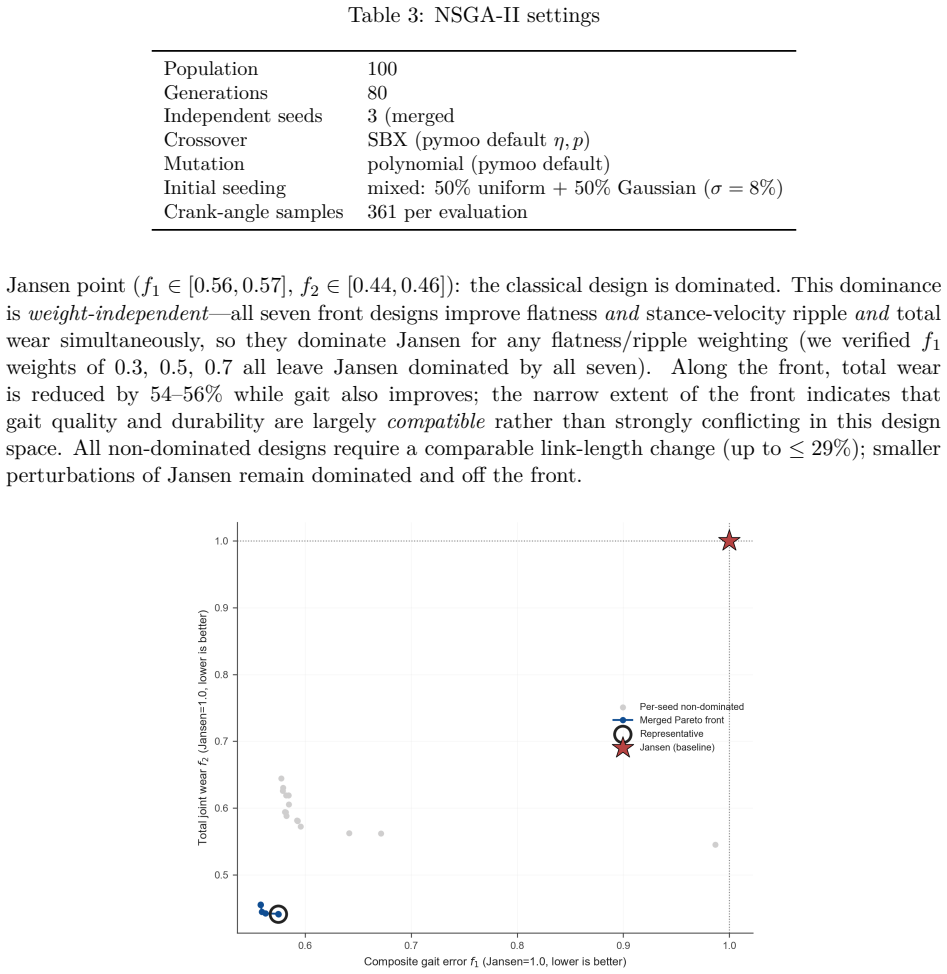
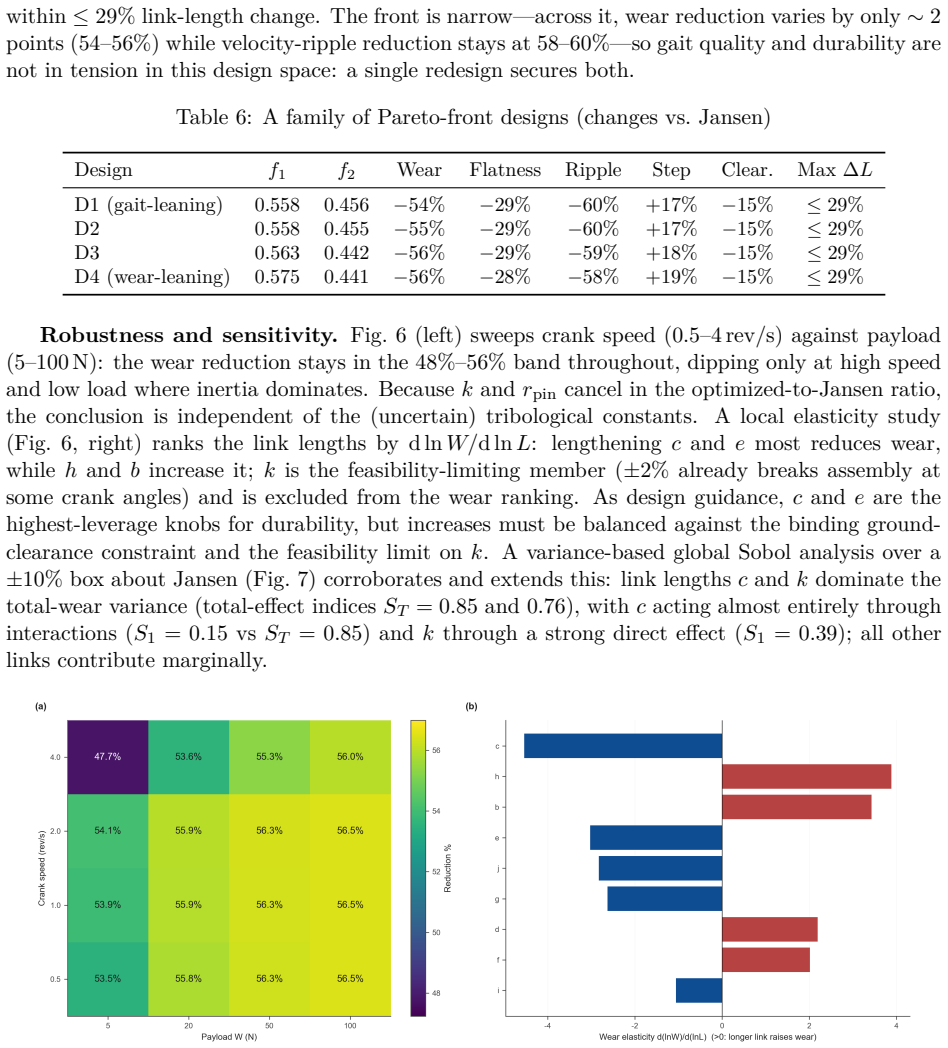
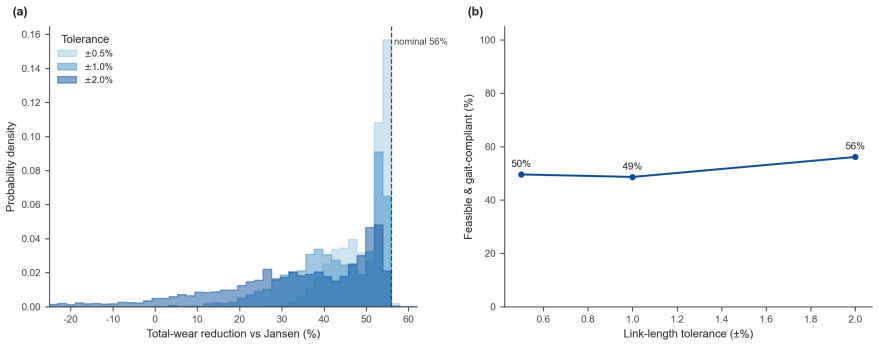
Under the composite gait-error metric the classical Jansen design is Pareto-dominated. Representative link-length adjustments within plus or minus 29 percent simultaneously reduce stance error by 28 percent, stance-velocity error by 58 percent, and summed joint wear by 56 percent. The wear advantage remains between 48 and 56 percent across a crank-speed by payload envelope, two link lengths dominate wear variance by Sobol analysis, and the advantage degrades gracefully under realistic manufacturing tolerances.
What carries the argument
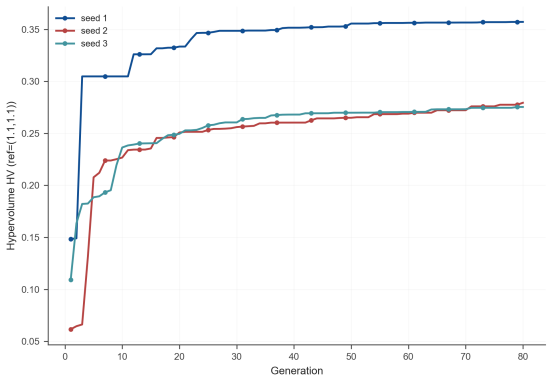
Bi-objective NSGA-II optimization of link lengths trading composite gait error against total Archard sliding wear at ten revolute joints, evaluated via two-circle intersection kinematics and constraint-Jacobian dynamics.
If this is right
- Two particular link lengths account for most of the wear variance across the design space.
- The wear reduction holds across the tested range of crank speeds and payloads.
- The advantage survives realistic manufacturing tolerances without sudden loss of benefit.
- The coupled model supplies a baseline for later studies that add joint clearance and impact loading.
Where Pith is reading between the lines
- The same durability-aware formulation could be applied directly to other single-DOF leg mechanisms.
- Physical wear tests on prototypes would be required to confirm whether the ideal-joint ranking survives real clearance and lubrication effects.
- The sensitivity results point to a small set of lengths that future designers could prioritize when scaling the mechanism.
Load-bearing premise
The Archard wear model applied to ideal clearance-free revolute joints supplies a valid relative durability ranking that can be traded against gait error.
What would settle it
Build and cycle a physical prototype to the reported optimized lengths versus the classical lengths and measure actual accumulated wear at the pins after a fixed number of steps.
Figures
read the original abstract
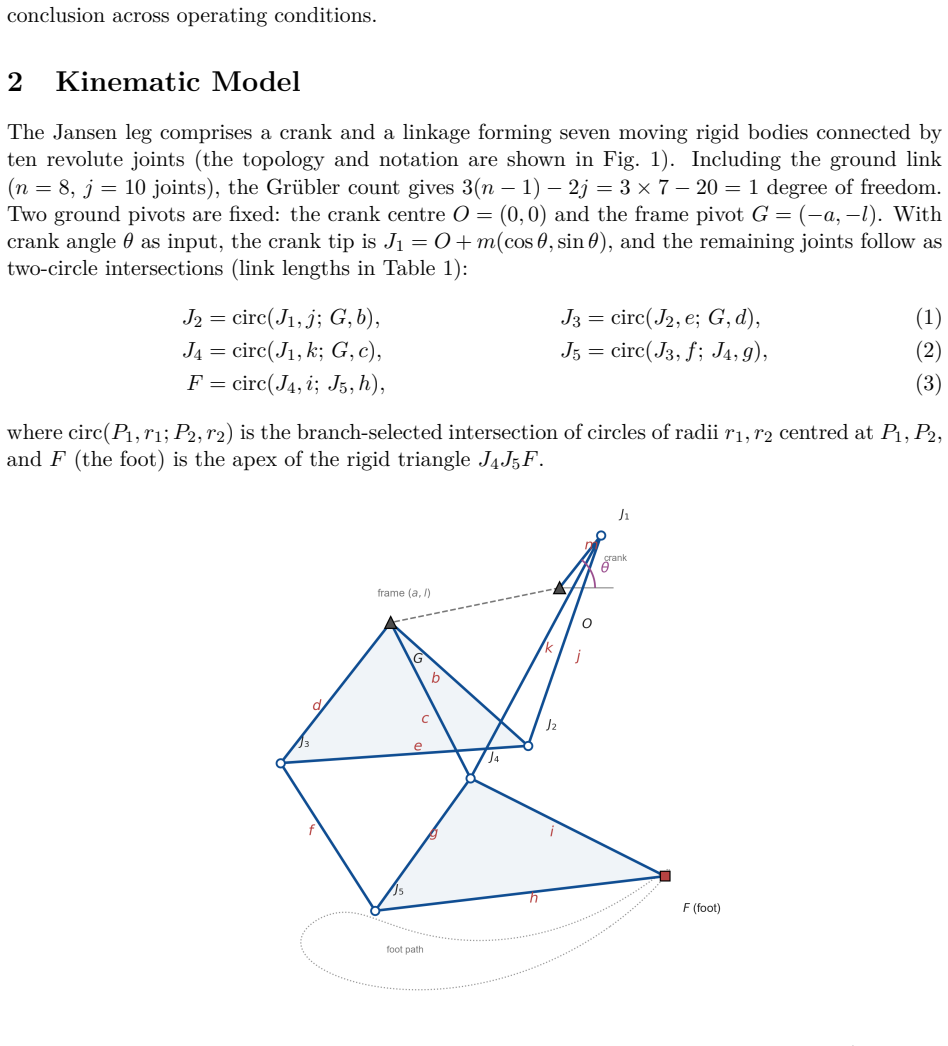
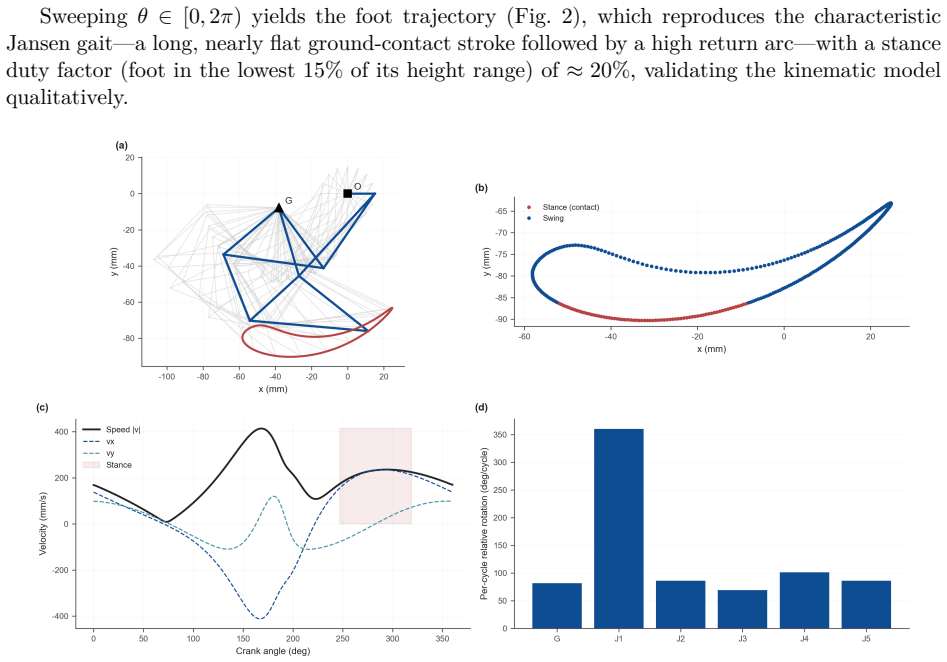
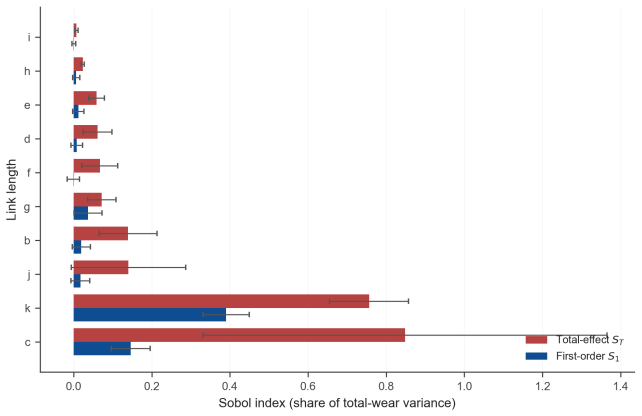
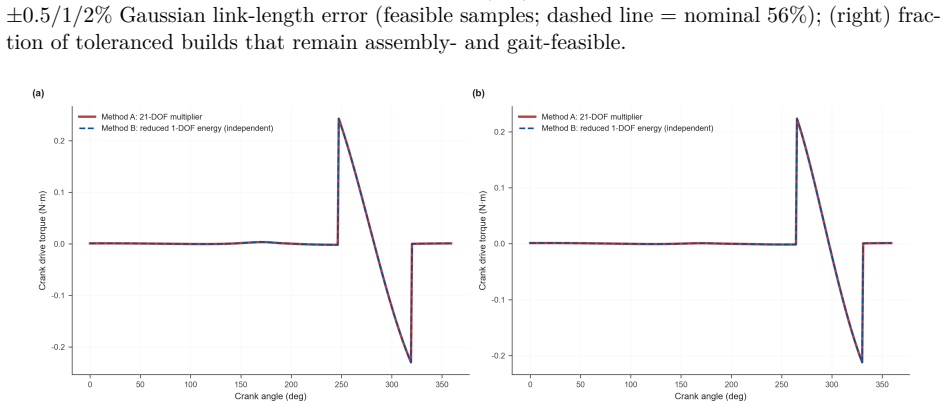
The Jansen linkage is a single-degree-of-freedom planar leg mechanism whose eleven "holy numbers" were evolved by Theo Jansen to optimize the foot-path gait alone, with no regard for the wear of its revolute joints. This paper introduces a durability objective into the design of the Jansen leg. A parametric forward-kinematic model (two-circle-intersection solver), an inverse-dynamic model (constraint-Jacobian / Lagrange-multiplier formulation of a seven-body, ten-joint system, independently cross-verified by a reduced-DOF energy method), and an Archard wear model are coupled to evaluate, for any set of link lengths, both gait quality and the per-cycle sliding wear at every pin. Because the wear is computed on ideal, clearance-free revolute joints, the resulting wear figures are a relative comparative ranking rather than an absolute life prediction. A bi-objective problem -- composite gait error versus total joint wear, subject to step-length, ground-clearance, duty-factor and assembly constraints -- is solved with NSGA-II. Under the adopted gait metric the classical Jansen design is Pareto-dominated: for a representative design, link-length adjustments within +/-29% simultaneously flatten the stance (-28%), smooth the stance velocity (-58%) and reduce total joint wear by ~56%. A sensitivity study shows the wear advantage is robust across a crank-speed x payload envelope (48%-56%) and identifies the link lengths that most strongly govern wear. A variance-based global (Sobol) analysis confirms that two link lengths dominate the wear variance, and a Monte-Carlo manufacturing-tolerance study shows the wear advantage degrades gracefully under realistic fabrication error. The framework provides a practical route to longer-lived walking linkages and a baseline for future wear-clearance-impact coupled studies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a durability-aware multi-objective optimization of the Jansen linkage using forward kinematics, inverse dynamics, and Archard wear models. It demonstrates that the classical Jansen design is Pareto-dominated under a composite gait error metric, with optimized link lengths within ±29% yielding simultaneous improvements in stance flatness (-28%), stance velocity smoothness (-58%), and total joint wear reduction (~56%), supported by sensitivity analyses across speeds and payloads, Sobol global sensitivity, and Monte-Carlo tolerance studies.
Significance. If the relative durability rankings hold under the ideal joint model, the work offers a practical framework for optimizing walking linkages for both gait quality and longevity. It provides credit for coupling multiple models, performing global sensitivity analysis to identify dominant links, and demonstrating robustness to manufacturing tolerances, establishing a baseline for future studies incorporating clearance and lubrication effects.
major comments (2)
- [Abstract and Wear Model Description] The claim of Pareto domination and the ~56% wear reduction depends on the Archard model supplying a valid relative ordering of designs. The manuscript correctly notes that the figures are relative rankings on ideal clearance-free joints, but does not explore whether introducing realistic clearance or distributed contact would preserve the ordering or the reported improvements; a non-monotonic shift would invalidate the central trade-off result.
- [Abstract] The reported percentage improvements lack accompanying error bars, standard deviations from the optimization runs, or explicit validation metrics (e.g., comparison of simulated wear to any benchmark), which leaves the quantitative strength of the domination claim only partially supported despite the cross-verification of the kinematic and dynamic models.
minor comments (2)
- A full list of all model parameters, wear coefficients, and constraint bounds should be provided in a table or appendix to enable exact reproduction of the results.
- The composite gait error definition is listed as a free parameter; clarifying its exact formulation and weighting would aid interpretation of the gait quality metric.
Simulated Author's Rebuttal
We thank the referee for the constructive review and positive recommendation. We address each major comment below, indicating planned revisions where appropriate.
read point-by-point responses
-
Referee: The claim of Pareto domination and the ~56% wear reduction depends on the Archard model supplying a valid relative ordering of designs. The manuscript correctly notes that the figures are relative rankings on ideal clearance-free joints, but does not explore whether introducing realistic clearance or distributed contact would preserve the ordering or the reported improvements; a non-monotonic shift would invalidate the central trade-off result.
Authors: We agree that the reported wear reductions and Pareto domination are relative rankings obtained under the ideal, clearance-free joint assumption, as already noted in the abstract and methods. Extending the model to include clearance or distributed contact would require new contact mechanics and would be a substantial addition beyond the present scope. We will revise the Discussion section to explicitly restate this scope limitation and to position the current results as a baseline for future clearance-coupled studies, without altering the core findings under the adopted model. revision: partial
-
Referee: The reported percentage improvements lack accompanying error bars, standard deviations from the optimization runs, or explicit validation metrics (e.g., comparison of simulated wear to any benchmark), which leaves the quantitative strength of the domination claim only partially supported despite the cross-verification of the kinematic and dynamic models.
Authors: The percentage values are deterministic point estimates obtained from the converged NSGA-II solution compared against the classical Jansen design. Robustness is instead quantified through the reported sensitivity envelope (48-56 % wear reduction), Sobol indices, and Monte-Carlo tolerance analysis. We will revise the abstract and results section to include standard deviations extracted from the Monte-Carlo runs and to restate the cross-verification of the kinematic/dynamic models as the primary validation approach. No experimental wear benchmark is available for this mechanism. revision: yes
Circularity Check
No significant circularity; models and optimization are independent of the reported improvements
full rationale
The paper defines separate forward-kinematic, inverse-dynamic (Lagrange-multiplier), and Archard wear models, then applies NSGA-II to a bi-objective problem whose outputs (gait error and total wear) are computed quantities, not inputs. The Pareto domination of the classical Jansen point is a numerical result of that search under explicit constraints; it does not reduce to a self-definition, a fitted parameter renamed as prediction, or any self-citation chain. The explicit caveat that wear figures are relative rankings on ideal joints further separates the model from any claim of absolute prediction. No enumerated circularity pattern is present.
Axiom & Free-Parameter Ledger
free parameters (2)
- Composite gait error definition
- Archard wear coefficients
axioms (2)
- domain assumption Revolute joints are ideal with zero clearance for wear calculation
- domain assumption Constraint-Jacobian / Lagrange-multiplier formulation accurately predicts joint reaction forces
Reference graph
Works this paper leans on
-
[1]
010 Publishers, Rotterdam, 2007
Theo Jansen.The Great Pretender. 010 Publishers, Rotterdam, 2007
2007
-
[2]
Lalit Patnaik and Loganathan Umanand. Kinematics and dynamics of Jansen leg mechanism: A bond graph approach.Simulation Modelling Practice and Theory, 60:160–169, 2016. doi: 10.1016/j.simpat.2015.10.003
-
[3]
Dynamic modeling and nonlinear position control of a quadruped robot with Theo Jansen linkage mechanisms and a single actuator.Journal of Robotics, 2015:315673, 2015
Shunsuke Nansai, Nicolas Rojas, Mohan Rajesh Elara, Ricardo Sosa, and Masami Iwase. Dynamic modeling and nonlinear position control of a quadruped robot with Theo Jansen linkage mechanisms and a single actuator.Journal of Robotics, 2015:315673, 2015. doi: 10. 1155/2015/315673
2015
-
[4]
Research and optimization design of mechanism for Theo Jansen bionic leg
Hongbin Zang. Research and optimization design of mechanism for Theo Jansen bionic leg. Journal of Mechanical Engineering, 53(15):101, 2017. doi: 10.3901/JME.2017.15.101
-
[5]
D. S. Mohan Varma. Synthesis and analysis of Jansen’s leg-based mechanism for gait reha- bilitation. InLecture Notes in Mechanical Engineering, pages 303–315. Springer, Singapore,
-
[6]
doi: 10.1007/978-981-15-4477-4_22
-
[7]
Kinematic analysis of mobile robot with Klann walking mechanism
Koray Kavlak and İbrahim Ali Kartal. Kinematic analysis of mobile robot with Klann walking mechanism. In2021 3rd International Congress on Human-Computer Interaction, Optimiza- tion and Robotic Applications (HORA), pages 1–6, 2021. doi: 10.1109/HORA52670.2021. 9461372
-
[8]
Shivamanappa G. Desai, Anandkumar R. Annigeri, and A. TimmanaGouda. Analysis of a new single degree-of-freedom eight link leg mechanism for walking machine.Mechanism and Machine Theory, 140:747–764, 2019. doi: 10.1016/j.mechmachtheory.2019.06.002
-
[9]
J. F. Archard. Contact and rubbing of flat surfaces.Journal of Applied Physics, 24(8):981–988,
-
[10]
doi: 10.1063/1.1721448
-
[11]
J. F. Archard and W. Hirst. The wear of metals under unlubricated conditions.Proceedings of the Royal Society of London A, 236(1206):397–410, 1956. doi: 10.1098/rspa.1956.0144
-
[12]
Paulo Flores and Jorge Ambrósio. Revolute joints with clearance in multibody systems.Com- puters & Structures, 82(17–19):1359–1369, 2004. doi: 10.1016/j.compstruc.2004.03.031
-
[13]
Qiang Tian, Paulo Flores, and Hamid M. Lankarani. A comprehensive survey of the analytical, numerical and experimental methodologies for dynamics of multibody mechanical systems with clearance or imperfect joints.Mechanism and Machine Theory, 122:1–57, 2018. doi: 10.1016/j.mechmachtheory.2017.12.002
-
[14]
Satellite maneuver detection and estimation with radar survey observations,
Paulo Flores. Modeling and simulation of wear in revolute clearance joints in multi- body systems.Mechanism and Machine Theory, 44(6):1211–1222, 2009. doi: 10.1016/j. mechmachtheory.2008.08.003
work page doi:10.1016/j 2009
-
[15]
Saad Mukras, Nam H. Kim, Nathan A. Mauntler, Tony L. Schmitz, and W. Gregory Sawyer. Analysis of planar multibody systems with revolute joint wear.Wear, 268(5–6):643–652, 2010. doi: 10.1016/j.wear.2009.10.014. 13
-
[16]
Z. F. Bai, H. B. Zhang, and Y. Sun. Wear prediction for dry revolute joint with clearance in multibody system by integrating dynamics model and wear model.Latin American Journal of Solids and Structures, 11(14):2624–2647, 2014. doi: 10.1590/S1679-78252014001400005
-
[17]
Xiongming Lai, Huang He, Qinfang Lai, Cheng Wang, Jianhong Yang, Yong Zhang, Huaiying Fang, and Shuirong Liao. Computational prediction and experimental validation of revolute joint clearance wear in the low-velocity planar mechanism.Mechanical Systems and Signal Processing, 85:963–976, 2017. doi: 10.1016/j.ymssp.2016.09.027
-
[18]
Yonghao Jia, Kai Meng, Shuai Jiang, and Jing Kang. Wear prediction and chaos identification of rigid–flexible coupling multi-link mechanisms with clearance.Lubricants, 13(3):130, 2025. doi: 10.3390/lubricants13030130
-
[19]
Shuai Liu, Yong Cui, Meng Xing, et al. A general tribo-dynamic model for lubricated clearance joints in spatial multibody systems.Scientific Reports, 15:8438, 2025. doi: 10.1038/s41598-025-88240-9
-
[20]
Xiulong Chen and Ziguo Wang. Dynamic response analysis and optimization of spatial mech- anism with wear clearance.Mechanics Based Design of Structures and Machines, 53(9):6422– 6442, 2025. doi: 10.1080/15397734.2025.2483871
-
[21]
Nader Nariman-Zadeh, M. Felezi, A. Jamali, and M. Ganji. Pareto optimal synthesis of four- bar mechanisms for path generation.Mechanism and Machine Theory, 44(1):180–191, 2009. doi: 10.1016/j.mechmachtheory.2008.02.006
-
[22]
M. Khorshidi, M. Soheilypour, M. Peyro, A. Atai, and M. Shariat Panahi. Optimal design of four-bar mechanisms using a hybrid multi-objective GA with adaptive local search.Mechanism and Machine Theory, 46(10):1453–1465, 2011. doi: 10.1016/j.mechmachtheory.2011.05.006
-
[23]
Suwin Sleesongsom and Sujin Bureerat. Optimal synthesis of four-bar linkage path generation through evolutionary computation with a novel constraint handling technique.Computational Intelligence and Neuroscience, 2018:5462563, 2018. doi: 10.1155/2018/5462563
-
[24]
Minxiu Kong, Lin Chen, Zhijiang Du, and Lining Sun. Multi-objective optimization on dy- namic performance for a planar parallel mechanism with NSGA-II algorithm.Robot, 32: 271–277, 2010. doi: 10.3724/SP.J.1218.2010.00271
-
[25]
SuminLee, JihoonKim, andNamwooKang. Deepgenerativemodel-basedsynthesisframework of four-bar linkage mechanisms with target conditions.Journal of Computational Design and Engineering, 11(5):318–332, 2024. doi: 10.1093/jcde/qwae084
-
[26]
Selçuk Erkaya and İbrahim Uzmay. Determining link parameters using genetic algorithm in mechanisms with joint clearance.Mechanism and Machine Theory, 44(1):222–234, 2009. doi: 10.1016/j.mechmachtheory.2008.02.002
-
[27]
Shabana.Dynamics of Multibody Systems
Ahmed A. Shabana.Dynamics of Multibody Systems. Cambridge University Press, 2020. doi: 10.1017/9781108757553
-
[28]
Kalyanmoy Deb, Amrit Pratap, Sameer Agarwal, and T. Meyarivan. A fast and elitist mul- tiobjective genetic algorithm: NSGA-II.IEEE Transactions on Evolutionary Computation, 6 (2):182–197, 2002. doi: 10.1109/4235.996017. 14
-
[29]
Julian Blank and Kalyanmoy Deb. pymoo: Multi-objective optimization in Python.IEEE Access, 8:89497–89509, 2020. doi: 10.1109/ACCESS.2020.2990567
-
[30]
Fonseca, and Viviane Grunert da Fonseca
Eckart Zitzler, Lothar Thiele, Marco Laumanns, Carlos M. Fonseca, and Viviane Grunert da Fonseca. Performance assessment of multiobjective optimizers: an analysis and review.IEEE Transactions on Evolutionary Computation, 7(2):117–132, 2003. doi: 10.1109/TEVC.2003. 810758
-
[31]
Hamid M. Lankarani and Parviz E. Nikravesh. A contact force model with hysteresis damping for impact analysis of multibody systems.Journal of Mechanical Design, 112(3):369–376, 1990. doi: 10.1115/1.2912617
-
[32]
D. W. Marhefka and D. E. Orin. A compliant contact model with nonlinear damping for simulation of robotic systems.IEEE Transactions on Systems, Man, and Cybernetics — Part A, 29(6):566–572, 1999. doi: 10.1109/3468.798060
-
[33]
Paulo Flores, Jorge Ambrósio, J. C. Pimenta Claro, and Hamid M. Lankarani.Kinematics and Dynamics of Multibody Systems with Imperfect Joints: Models and Case Studies. Springer,
-
[34]
doi: 10.1007/978-3-540-74361-3. 15
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.