SPiralRoll: A Novel Adjustable-Stiffness Underactuated 3-DoF Joint with Torsion Springs for Rolling Robots
Pith reviewed 2026-06-26 10:22 UTC · model grok-4.3
The pith
Arc-distributed torsion springs produce three independent output motions from two motor inputs in a 3D-printable underactuated joint.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Arc-distributed torsion springs driven by two motors realize three physically distinct output motions through nonlinear elastic deformation, with the full-arc configuration supplying greater structural support and the single-arc configuration producing larger radial and inertial effects that suit pendulum-driven rolling.
What carries the argument
Arc-distributed torsion springs (full-arc or single-arc layouts) that convert two motor inputs into three coupled yet observable motions via elastic deformation.
If this is right
- Full-arc versions suit applications that prioritize stable load-bearing over maximum deformation.
- Single-arc versions suit pendulum-driven rolling where larger inertial excitation improves locomotion.
- The fully 3D-printable construction lowers cost and complexity for compliant rolling platforms.
- Two-input three-output mapping reduces the actuator count needed for adaptive spherical robots.
Where Pith is reading between the lines
- The same spring layout could be scaled to other underactuated limbs that need radial compliance without extra motors.
- Integration with simple pendulum drives may allow terrain-adaptive rolling without complex sensing.
- Energy stored and released in the arcs during deformation could improve efficiency in repeated rolling cycles.
Load-bearing premise
The three output motions remain mechanically independent and controllable without interference once the joint is placed inside a rolling robot chassis.
What would settle it
A test that records whether the spherical robot can command rotation, radial change, and axial spin independently while rolling without visible coupling or loss of one degree of freedom.
Figures
read the original abstract
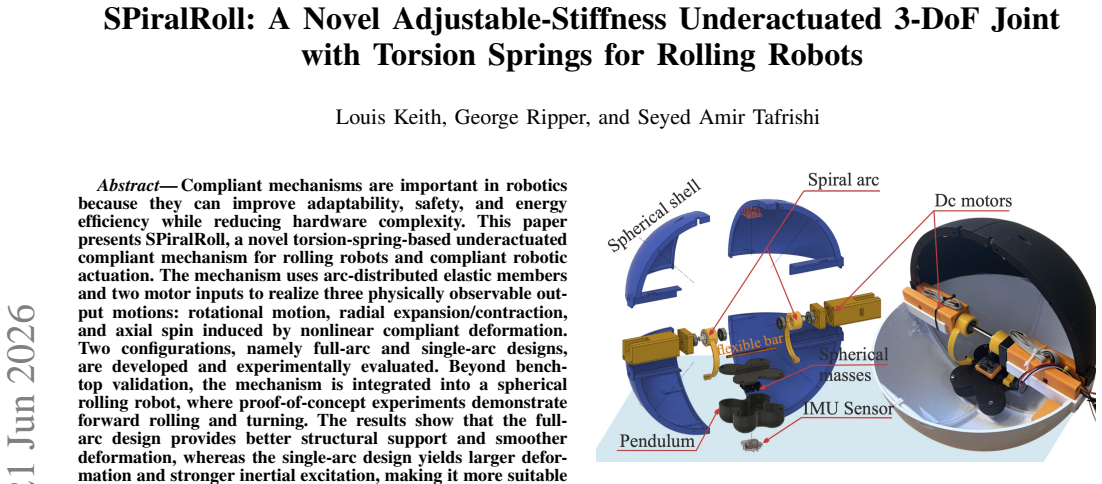
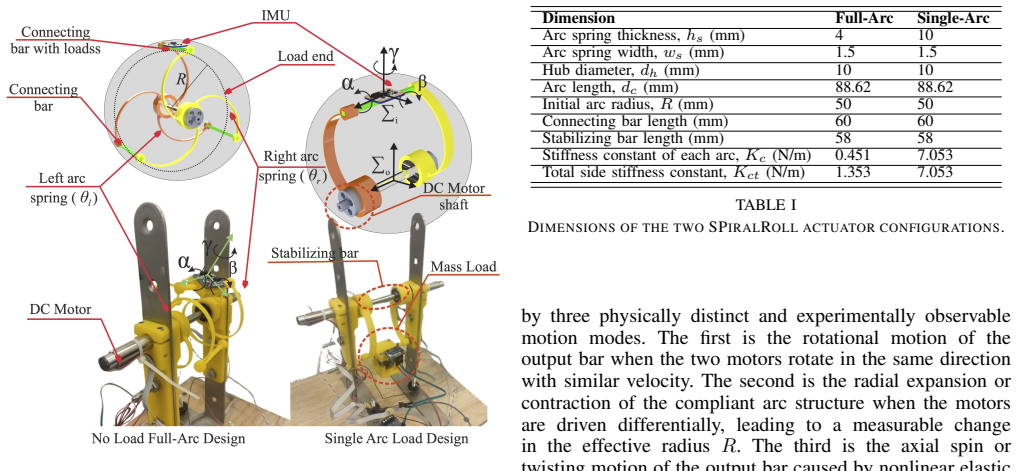
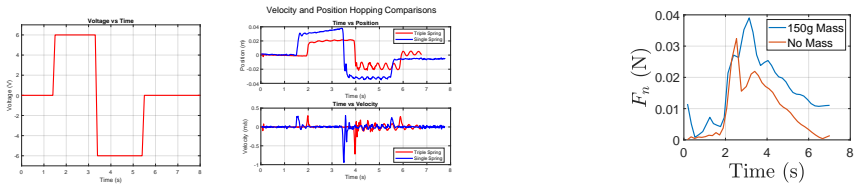
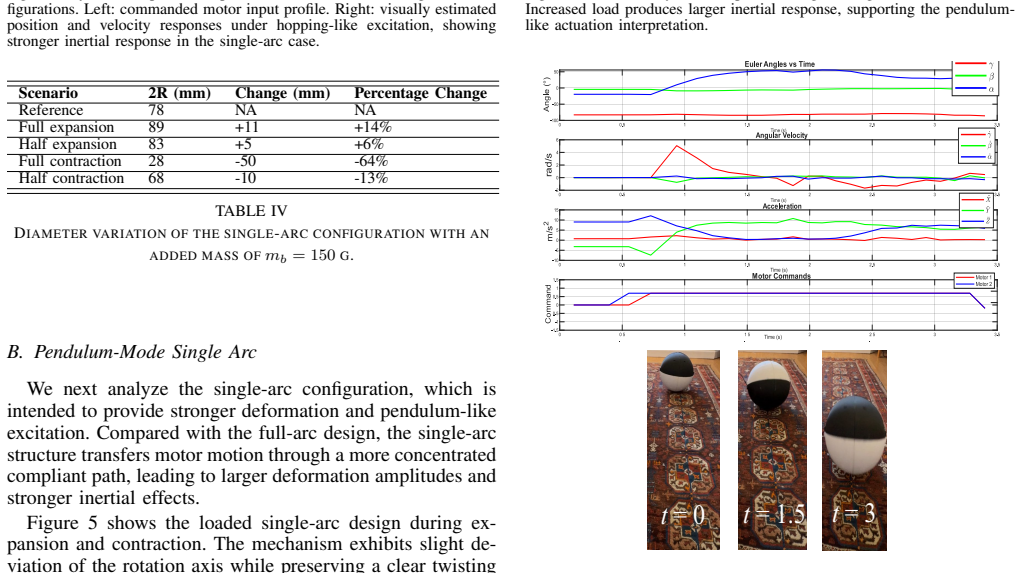
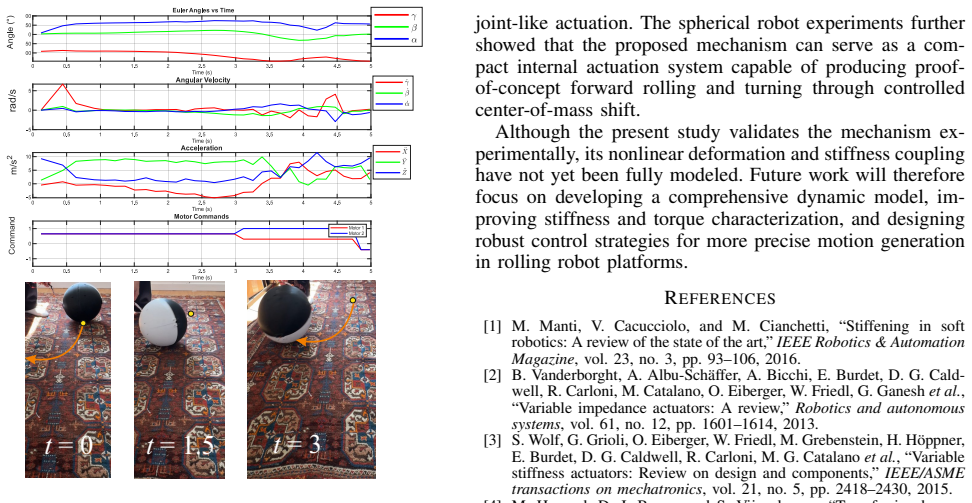
Compliant mechanisms are important in robotics because they can improve adaptability, safety, and energy efficiency while reducing hardware complexity. This paper presents SPiralRoll, a novel torsion-spring-based underactuated compliant mechanism for rolling robots and compliant robotic actuation. The mechanism uses arc-distributed elastic members and two motor inputs to realize three physically observable output motions: rotational motion, radial expansion/contraction, and axial spin induced by nonlinear compliant deformation. Two configurations, namely full-arc and single-arc designs, are developed and experimentally evaluated. Beyond benchtop validation, the mechanism is integrated into a spherical rolling robot, where proof-of-concept experiments demonstrate forward rolling and turning. The results show that the full-arc design provides better structural support and smoother deformation, whereas the single-arc design yields larger deformation and stronger inertial excitation, making it more suitable for pendulum-driven rolling locomotion. Overall, SPiralRoll provides a low-cost, compact, and fully 3D-printable solution for underactuated compliant rolling robots and adaptive robotic joints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents SPiralRoll, a torsion-spring-based underactuated compliant mechanism realizing three output motions (rotation, radial expansion/contraction, axial spin) from two motor inputs via arc-distributed elastic elements. Two variants (full-arc and single-arc) are described, with benchtop tests and integration into a spherical rolling robot demonstrating forward rolling and turning. The full-arc design is claimed to provide better structural support and smoother deformation, while the single-arc yields larger deformation and stronger inertial excitation suitable for pendulum-driven locomotion. The work positions the mechanism as a low-cost, compact, fully 3D-printable solution for compliant rolling robots and adaptive joints.
Significance. If substantiated, the design offers a practical, printable approach to adjustable-stiffness underactuated joints that could reduce hardware complexity in compliant robotics while enabling adaptive rolling behaviors. The emphasis on nonlinear deformation for multi-DoF output from minimal actuation aligns with established principles in underactuated mechanisms and could support applications in safe, energy-efficient mobile robots.
major comments (2)
- [Experimental Validation] The abstract and design description assert that benchtop and robot experiments were performed and that one design is superior for support while the other is better for deformation, yet no quantitative measurements, error bars, statistical tests, or raw data are supplied to support these performance claims. This absence prevents verification of the central experimental assertions.
- [Mechanism Design] The claim of three physically observable and independent output motions from two inputs via nonlinear compliant deformation lacks supporting kinematic analysis, dynamic modeling, or controllability assessment to confirm absence of mechanical interference or loss of independent control when integrated into the rolling chassis.
minor comments (1)
- Notation for the two motor inputs and the three output motions should be defined consistently with symbols or labels in any accompanying figures or equations.
Simulated Author's Rebuttal
We thank the referee for their insightful comments on our manuscript. We address each major comment below and indicate the revisions we will make to strengthen the paper.
read point-by-point responses
-
Referee: [Experimental Validation] The abstract and design description assert that benchtop and robot experiments were performed and that one design is superior for support while the other is better for deformation, yet no quantitative measurements, error bars, statistical tests, or raw data are supplied to support these performance claims. This absence prevents verification of the central experimental assertions.
Authors: We acknowledge that the experimental validation in the manuscript is primarily qualitative. To address this, we will include quantitative measurements from the benchtop tests, such as specific displacement and rotation values with error bars, and comparative data between the two designs. Statistical tests will be incorporated if the data supports it. revision: yes
-
Referee: [Mechanism Design] The claim of three physically observable and independent output motions from two inputs via nonlinear compliant deformation lacks supporting kinematic analysis, dynamic modeling, or controllability assessment to confirm absence of mechanical interference or loss of independent control when integrated into the rolling chassis.
Authors: The paper demonstrates the motions experimentally. We will add a section providing kinematic analysis of the mechanism to show how the three motions are achieved from two inputs without interference, based on the arc geometry and spring placement. Full dynamic modeling and controllability assessment are beyond the scope of this work, but we will discuss the practical independence observed in the rolling robot tests. revision: partial
Circularity Check
No significant circularity
full rationale
The paper is a descriptive account of a physical mechanism design (arc-distributed torsion springs realizing three output motions from two inputs) together with benchtop and integration experiments. No equations, parameter fits, predictions, or derivation chains appear in the provided material. Claims rest on direct experimental observation rather than any self-referential reduction, self-citation load-bearing step, or imported uniqueness result. The work is therefore self-contained as an engineering description and does not trigger any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Stiffening in soft robotics: A review of the state of the art,
M. Manti, V . Cacucciolo, and M. Cianchetti, “Stiffening in soft robotics: A review of the state of the art,”IEEE Robotics & Automation Magazine, vol. 23, no. 3, pp. 93–106, 2016
2016
-
[2]
Variable impedance actuators: A review,
B. Vanderborght, A. Albu-Sch ¨affer, A. Bicchi, E. Burdet, D. G. Cald- well, R. Carloni, M. Catalano, O. Eiberger, W. Friedl, G. Ganeshet al., “Variable impedance actuators: A review,”Robotics and autonomous systems, vol. 61, no. 12, pp. 1601–1614, 2013
2013
-
[3]
Variable stiffness actuators: Review on design and components,
S. Wolf, G. Grioli, O. Eiberger, W. Friedl, M. Grebenstein, H. H¨oppner, E. Burdet, D. G. Caldwell, R. Carloni, M. G. Catalanoet al., “Variable stiffness actuators: Review on design and components,”IEEE/ASME transactions on mechatronics, vol. 21, no. 5, pp. 2418–2430, 2015
2015
-
[4]
Transferring human impedance behavior to heterogeneous variable impedance actuators,
M. Howard, D. J. Braun, and S. Vijayakumar, “Transferring human impedance behavior to heterogeneous variable impedance actuators,” IEEE Transactions on Robotics, vol. 29, no. 4, pp. 847–862, 2013
2013
-
[5]
Toward safe human–robot in- teraction: A fast-response admittance control method for series elastic actuator,
H. Zhong, X. Li, L. Gao, and C. Li, “Toward safe human–robot in- teraction: A fast-response admittance control method for series elastic actuator,”IEEE Transactions on Automation Science and Engineering, vol. 19, no. 2, pp. 919–932, 2021
2021
-
[6]
Design of parallel variable stiffness actuators,
C. W. Mathews and D. J. Braun, “Design of parallel variable stiffness actuators,”IEEE Transactions on Robotics, 2022
2022
-
[7]
An energy-dense two-part torsion spring architecture and design tool,
Z. Bons, G. C. Thomas, L. Mooney, and E. J. Rouse, “An energy-dense two-part torsion spring architecture and design tool,”IEEE/ASME Transactions on Mechatronics, vol. 29, no. 3, pp. 2373–2384, 2023
2023
-
[8]
Underactuated robotics: a review,
B. He, S. Wang, and Y . Liu, “Underactuated robotics: a review,” International Journal of Advanced Robotic Systems, vol. 16, no. 4, p. 1729881419862164, 2019
2019
-
[9]
A survey on underactuated robotic systems: bio-inspiration, trajectory planning and control,
P. Liu, M. N. Huda, L. Sun, and H. Yu, “A survey on underactuated robotic systems: bio-inspiration, trajectory planning and control,” Mechatronics, vol. 72, p. 102443, 2020
2020
-
[10]
Feedback regulation of elastically decoupled underactuated soft robots,
P. Pustina, C. Della Santina, and A. De Luca, “Feedback regulation of elastically decoupled underactuated soft robots,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4512–4519, 2022
2022
-
[11]
Tracked robot with underactuated tension-driven rrp transformable mechanism: ideas and design,
R. Xu and C. Liu, “Tracked robot with underactuated tension-driven rrp transformable mechanism: ideas and design,”Frontiers of Mechan- ical Engineering, vol. 19, no. 1, p. 4, 2024
2024
-
[12]
Rolling in nature and robotics: A review,
R. H. Armour and J. F. Vincent, “Rolling in nature and robotics: A review,”Journal of Bionic Engineering, vol. 3, no. 4, pp. 195–208, 2006
2006
-
[13]
Spherical rolling robots—design, modeling, and control: A systematic literature review,
A. Diouf, B. Belzile, M. Saad, and D. St-Onge, “Spherical rolling robots—design, modeling, and control: A systematic literature review,” Robotics and Autonomous Systems, vol. 176, p. 104657, 2024
2024
-
[14]
Design, modeling, and motion analysis of a novel fluid actuated spherical rolling robot,
S. A. Tafrishi, M. Svinin, E. Esmaeilzadeh, and M. Yamamoto, “Design, modeling, and motion analysis of a novel fluid actuated spherical rolling robot,”Journal of Mechanisms and Robotics, vol. 11, no. 4, p. 041010, 2019
2019
-
[15]
Motion control of an underactuated spherical robot: A hierarchical sliding-mode approach with disturbance estimation,
B. Liu, M. Yue, and R. Liu, “Motion control of an underactuated spherical robot: A hierarchical sliding-mode approach with disturbance estimation,” in2012 IEEE International Conference on Mechatronics and Automation. IEEE, 2012, pp. 1804–1809
2012
-
[16]
Monorollbot: 3-dof spherical robot with underactuated single compliant actuator design,
Z. Liu and S. A. Tafrishi, “Monorollbot: 3-dof spherical robot with underactuated single compliant actuator design,” inIEEE International Conference on Soft Robotics (RoboSoft), 2025
2025
-
[17]
Compliant joint actuator with dual spiral springs,
Y . Kim, J. Lee, and J. Park, “Compliant joint actuator with dual spiral springs,”IEEE/ASME Transactions on Mechatronics, vol. 18, no. 6, pp. 1839–1844, 2013
2013
-
[18]
Spiro: A compliant spiral spring–damper joint actuator with energy-based sliding-mode controller,
S. A. Tafrishi and Y . Hirata, “Spiro: A compliant spiral spring–damper joint actuator with energy-based sliding-mode controller,”IEEE/ASME Transactions on Mechatronics, vol. 29, no. 2, pp. 947–959, 2024
2024
-
[19]
Rollbot: a spherical robot driven by a single actuator,
J. Wang and M. Rubenstein, “Rollbot: a spherical robot driven by a single actuator,”arXiv preprint arXiv:2404.05120, 2024
Pith/arXiv arXiv 2024
-
[20]
Beyond jamming grippers: Granular material in robotics,
H. Liet al., “Beyond jamming grippers: Granular material in robotics,”Advanced Robotics, vol. 38, no. 11, pp. 715–729, 2024. [Online]. Available: https://doi.org/10.1080/01691864.2024.2348544
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.