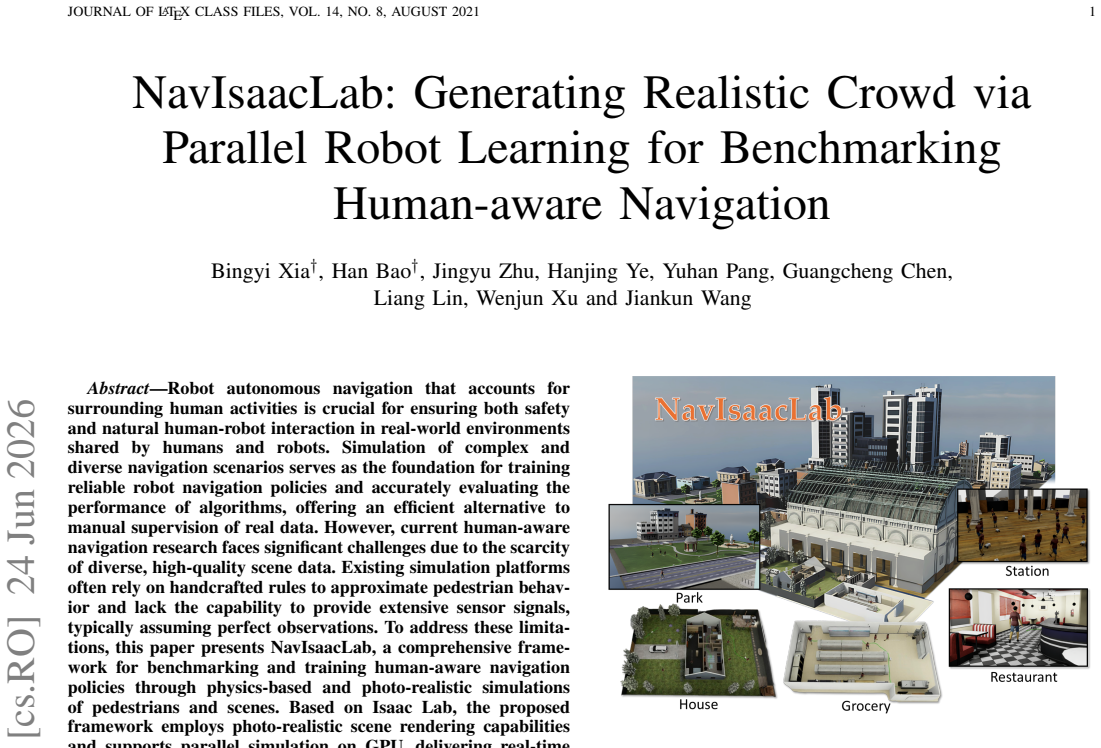
NavIsaacLab: Generating Realistic Crowd via Parallel Robot Learning for Benchmarking Human-aware Navigation
Pith reviewed 2026-06-26 01:52 UTC · model grok-4.3
The pith
NavIsaacLab generates realistic pedestrian crowds through diffusion models and GPU simulation to benchmark human-aware robot navigation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
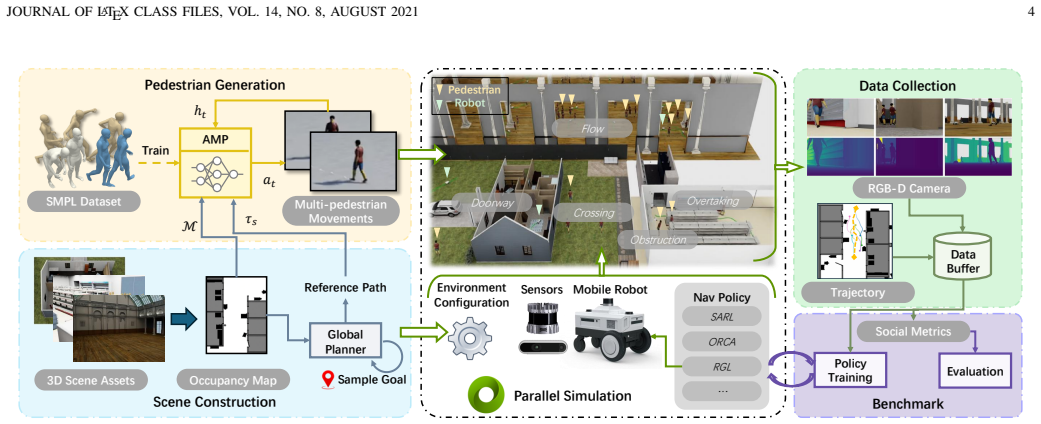
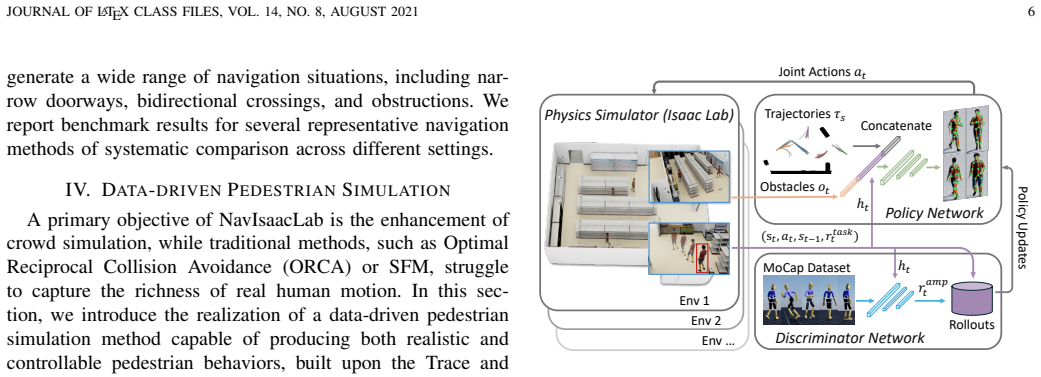
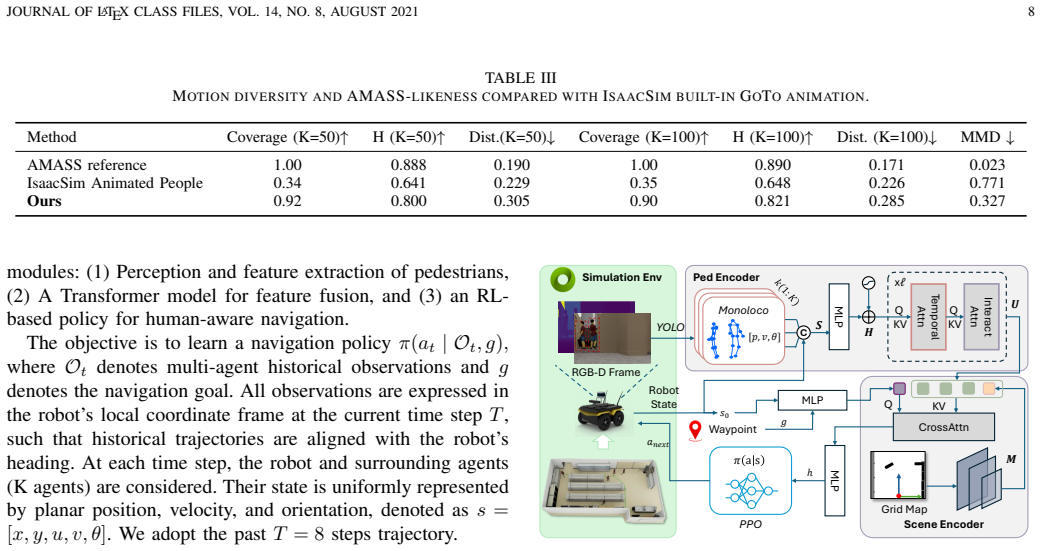
NavIsaacLab is a comprehensive framework for benchmarking and training human-aware navigation policies through physics-based and photo-realistic simulations of pedestrians and scenes. Based on Isaac Lab, the proposed framework employs photo-realistic scene rendering capabilities and supports parallel simulation on GPU, delivering real-time and accurate 3D visual feedback to robots. To enhance the realism of human behavior, a data-driven approach is employed that incorporates a trajectory diffusion model and an adversarial motion learning controller, enabling controllable, physics-based pedestrian simulation. Furthermore, the integration of diverse cross-scale scenes provides a robust benchma
What carries the argument
NavIsaacLab framework that couples Isaac Lab's photo-realistic rendering and GPU-parallel simulation with a trajectory diffusion model and adversarial motion learning controller to produce controllable pedestrian trajectories and motions.
If this is right
- Navigation policies can be trained and evaluated without manual collection or labeling of real pedestrian data.
- Algorithms receive accurate performance scores under extensive, imperfect sensor signals rather than perfect observations.
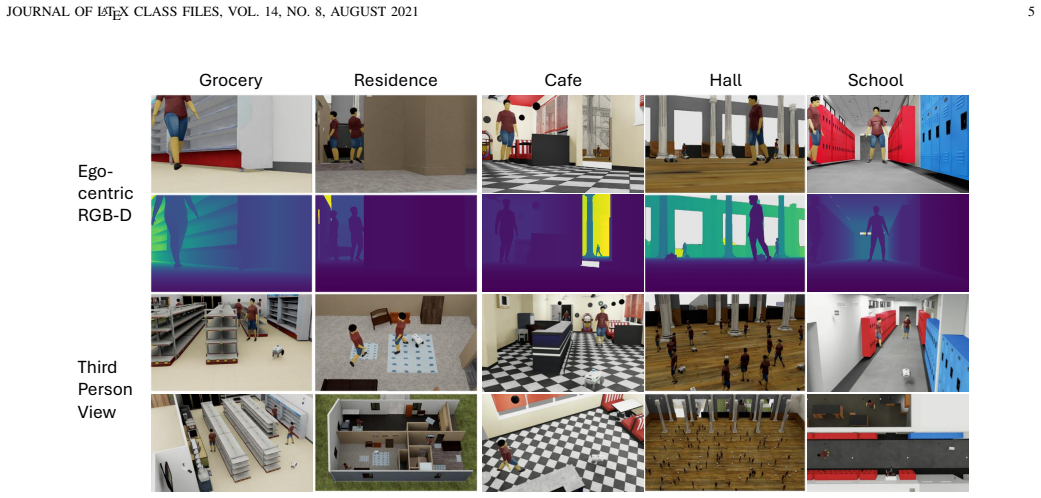
- Diverse cross-scale scenes allow systematic testing across indoor, outdoor, and varying crowd densities.
- Parallel GPU execution supports large-scale training runs that were previously limited by serial simulation speed.
Where Pith is reading between the lines
- The same controllable pedestrian generator could be used to create targeted stress tests for rare but safety-critical behaviors.
- If the learned motions transfer well, the framework might serve as a shared community benchmark replacing scattered custom simulators.
- Extending the cross-scale scene library to include dynamic lighting or weather changes would further close the sim-to-real gap.
Load-bearing premise
The trajectory diffusion model combined with the adversarial motion learning controller produces pedestrian trajectories and motions that are sufficiently realistic and transferable to real human behavior for the resulting navigation policies to be reliable in physical environments.
What would settle it
Deploy a navigation policy trained only inside NavIsaacLab into a real shared human-robot space and measure whether it maintains safe distances and natural interactions; consistent failure would falsify the central claim.
Figures
read the original abstract
Robot autonomous navigation that accounts for surrounding human activities is crucial for ensuring both safety and natural human-robot interaction in real-world environments shared by humans and robots. Simulation of complex and diverse navigation scenarios serves as the foundation for training reliable robot navigation policies and accurately evaluating the performance of algorithms, offering an efficient alternative to manual supervision of real data. However, current human-aware navigation research faces significant challenges due to the scarcity of diverse, high-quality scene data. Existing simulation platforms often rely on handcrafted rules to approximate pedestrian behavior and lack the capability to provide extensive sensor signals, typically assuming perfect observations. To address these limitations, this paper presents NavIsaacLab, a comprehensive framework for benchmarking and training human-aware navigation policies through physics-based and photo-realistic simulations of pedestrians and scenes. Based on Isaac Lab, the proposed framework employs photo-realistic scene rendering capabilities and supports parallel simulation on GPU, delivering real-time and accurate 3D visual feedback to robots. To enhance the realism of human behavior, a data-driven approach is employed that incorporates a trajectory diffusion model and an adversarial motion learning controller, enabling controllable, physics-based pedestrian simulation. Furthermore, the integration of diverse cross-scale scenes provides a robust benchmark for state-of-the-art human-aware navigation methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents NavIsaacLab, a framework extending Isaac Lab for physics-based and photo-realistic simulation of pedestrians and scenes to support training and benchmarking of human-aware robot navigation policies. It incorporates a trajectory diffusion model and an adversarial motion learning controller for data-driven pedestrian simulation, GPU-parallel execution, and diverse cross-scale scenes to address limitations in existing simulators that rely on handcrafted rules and lack sensor signals.
Significance. If the proposed pedestrian simulation components produce controllable and realistic behaviors that transfer to real-world settings, NavIsaacLab could provide a valuable platform for developing reliable human-aware navigation algorithms, particularly by enabling scalable parallel simulations with rich visual feedback.
major comments (2)
- [Abstract (data-driven approach paragraph)] Abstract (data-driven approach paragraph): The central claim that the trajectory diffusion model combined with the adversarial motion learning controller produces realistic, controllable, physics-based pedestrian trajectories and motions is load-bearing for the benchmarking and policy-transfer utility, yet the manuscript provides no training details, loss formulations, quantitative metrics (ADE/FDE, collision rates), perceptual studies, or comparisons against real datasets or baselines such as ORCA.
- [Abstract (final sentence on integration of diverse cross-scale scenes)] Abstract (final sentence on integration of diverse cross-scale scenes): The assertion that the framework 'provides a robust benchmark for state-of-the-art human-aware navigation methods' is unsupported by any experimental results, validation experiments, error analysis, or performance comparisons, rendering the benchmarking contribution unevaluable.
minor comments (1)
- The title references 'Parallel Robot Learning' while the abstract emphasizes simulation and benchmarking; the connection between the crowd-generation components and any robot-learning pipeline should be clarified.
Simulated Author's Rebuttal
We thank the referee for the careful review and valuable feedback on the abstract claims. We address each major comment below and commit to revisions that strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract (data-driven approach paragraph)] Abstract (data-driven approach paragraph): The central claim that the trajectory diffusion model combined with the adversarial motion learning controller produces realistic, controllable, physics-based pedestrian trajectories and motions is load-bearing for the benchmarking and policy-transfer utility, yet the manuscript provides no training details, loss formulations, quantitative metrics (ADE/FDE, collision rates), perceptual studies, or comparisons against real datasets or baselines such as ORCA.
Authors: We agree that the data-driven pedestrian components require more rigorous support. In the revised manuscript we will add a dedicated subsection detailing the training procedure, loss formulations for both the trajectory diffusion model and adversarial motion learning controller, quantitative results (ADE/FDE, collision rates) on real pedestrian datasets, direct comparisons against ORCA and other baselines, and any perceptual evaluation results that were performed. These additions will be placed in the methods and experiments sections to substantiate the claims. revision: yes
-
Referee: [Abstract (final sentence on integration of diverse cross-scale scenes)] Abstract (final sentence on integration of diverse cross-scale scenes): The assertion that the framework 'provides a robust benchmark for state-of-the-art human-aware navigation methods' is unsupported by any experimental results, validation experiments, error analysis, or performance comparisons, rendering the benchmarking contribution unevaluable.
Authors: We acknowledge that the abstract phrasing overstates the current empirical validation of the benchmarking capability. We will revise the abstract to describe the framework's design for benchmarking and will include new experimental results in the revised manuscript that demonstrate its use for evaluating human-aware navigation policies, together with validation experiments, error analysis, and performance comparisons against existing methods. revision: yes
Circularity Check
No circularity: framework description with no self-referential derivations
full rationale
The paper presents NavIsaacLab as a simulation framework built on Isaac Lab, incorporating existing trajectory diffusion models and adversarial controllers for pedestrian behavior. No equations, first-principles derivations, or predictions are described that reduce by construction to fitted inputs or self-citations. Claims about realism and benchmarking rest on the integration of external techniques rather than internal self-definition or load-bearing self-citation chains. This is a standard non-finding for an applied systems paper.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Data-driven models (diffusion + adversarial) can generate controllable and physics-plausible pedestrian behavior that approximates real humans
- domain assumption GPU-parallel physics simulation with photo-realistic rendering supplies accurate 3D visual feedback equivalent to real sensor observations
Reference graph
Works this paper leans on
-
[1]
Acceptance of autonomous delivery robots in urban cities,
K. F. Yuenet al., “Acceptance of autonomous delivery robots in urban cities,”Cities, vol. 131, p. 104056, 2022. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0264275122004954
2022
-
[2]
Collaborative trolley transportation system with au- tonomous nonholonomic robots,
B. Xiaet al., “Collaborative trolley transportation system with au- tonomous nonholonomic robots,” in2023 IEEE/RSJ International Con- ference on Intelligent Robots and Systems (IROS), 2023, pp. 8046–8053
2023
-
[3]
System configuration and navigation of a guide dog robot: Toward animal guide dog-level guiding work,
H. Hwanget al., “System configuration and navigation of a guide dog robot: Toward animal guide dog-level guiding work,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 9778–9784
2023
-
[4]
A survey on socially aware robot navigation: Taxonomy and future challenges,
P. T. Singamaneniet al., “A survey on socially aware robot navigation: Taxonomy and future challenges,”The International Journal of Robotics Research, p. 02783649241230562, 2024
2024
-
[5]
A. Franciset al., “Principles and guidelines for evaluating social robot navigation algorithms,”J. Hum.-Robot Interact., Dec. 2024, just Accepted. [Online]. Available: https://doi.org/10.1145/3700599
-
[6]
Robot navigation in crowds by graph convolutional networks with attention learned from human gaze,
Y . Chenet al., “Robot navigation in crowds by graph convolutional networks with attention learned from human gaze,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2754–2761, 2020
2020
-
[7]
Human orientation estimation under partial observation,
J. Zhaoet al., “Human orientation estimation under partial observation,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 11 544–11 551
2024
-
[8]
Socialcircle: Learning the angle-based social interaction representation for pedestrian trajectory prediction,
C. Wonget al., “Socialcircle: Learning the angle-based social interaction representation for pedestrian trajectory prediction,” in2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024, pp. 19 005–19 015
2024
-
[9]
Robots that can see: Leveraging human pose for trajectory prediction,
T. Salzmannet al., “Robots that can see: Leveraging human pose for trajectory prediction,”IEEE Robotics and Automation Letters, vol. 8, no. 11, pp. 7090–7097, 2023
2023
-
[10]
Social-transmotion: Promptable human trajectory prediction,
S. Saadatnejadet al., “Social-transmotion: Promptable human trajectory prediction,” inInternational Conference on Learning Representations (ICLR), 2024
2024
-
[11]
Hyp-despot: A hybrid parallel algorithm for online planning under uncertainty,
P. Caiet al., “Hyp-despot: A hybrid parallel algorithm for online planning under uncertainty,”The International Journal of Robotics Research, vol. 40, no. 2-3, pp. 558–573, 2021. JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2021 12
2021
-
[12]
Learning crowd-aware robot naviga- tion from challenging environments via distributed deep reinforcement learning,
S. Matsuzaki and Y . Hasegawa, “Learning crowd-aware robot naviga- tion from challenging environments via distributed deep reinforcement learning,” in2022 International Conference on Robotics and Automation (ICRA), 2022, pp. 4730–4736
2022
-
[13]
SEAN 2.0: Formalizing and generating social situations for robot navigation,
N. Tsoiet al., “SEAN 2.0: Formalizing and generating social situations for robot navigation,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 11 047–11 054, 2022. [Online]. Available: https://ieeexplore.ieee.org/document/9851501/
arXiv 2022
-
[14]
HuNavSim: A ROS 2 human navigation simulator for benchmarking human-aware robot navigation,
N. P ´erez-Higueraset al., “HuNavSim: A ROS 2 human navigation simulator for benchmarking human-aware robot navigation,”IEEE Robotics and Automation Letters, vol. 8, no. 11, pp. 7130–7137, 2023. [Online]. Available: https://ieeexplore.ieee.org/document/10252030/
arXiv 2023
-
[15]
Characterizing the complexity of social robot navigation scenarios,
A. Stratton, K. Hauser, and C. Mavrogiannis, “Characterizing the complexity of social robot navigation scenarios,”IEEE Robotics and Automation Letters, vol. 10, no. 1, pp. 184–191, 2025
2025
-
[17]
Available: https://arxiv.org/abs/2511.04831
[Online]. Available: https://arxiv.org/abs/2511.04831
-
[18]
Trace and pace: Controllable pedestrian animation via guided trajectory diffusion,
D. Rempeet al., “Trace and pace: Controllable pedestrian animation via guided trajectory diffusion,” inConference on Computer Vision and Pattern Recognition (CVPR), 2023
2023
-
[19]
Motion planning among dynamic, decision-making agents with deep reinforcement learning,
M. Everett, Y . F. Chen, and J. P. How, “Motion planning among dynamic, decision-making agents with deep reinforcement learning,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2018, pp. 3052–3059
2018
-
[20]
A. Biswaset al., “SocNavBench: A grounded simulation testing framework for evaluating social navigation,”ACM Transactions on Human-Robot Interaction, vol. 11, no. 3, pp. 1–24, 2022. [Online]. Available: https://dl.acm.org/doi/10.1145/3476413
-
[21]
Habicrowd: A high performance simulator for crowd- aware visual navigation,
A. Vuonget al., “Habicrowd: A high performance simulator for crowd- aware visual navigation,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 5821–5827
2024
-
[22]
Demonstrating arena 3.0: Advancing social navigation in collaborative and highly dynamic environments,
L. K ¨astneret al., “Demonstrating arena 3.0: Advancing social navigation in collaborative and highly dynamic environments,” inProceedings of Robotics: Science and Systems, 2024
2024
-
[23]
The hybrid reciprocal velocity obstacle,
J. Snapeet al., “The hybrid reciprocal velocity obstacle,”IEEE Trans- actions on Robotics, vol. 27, no. 4, pp. 696–706, 2011
2011
-
[24]
Socially aware motion planning with deep rein- forcement learning,
Y . F. Chenet al., “Socially aware motion planning with deep rein- forcement learning,” in2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017, pp. 1343–1350
2017
-
[25]
Crowd-robot interaction: Crowd-aware robot navigation with attention-based deep reinforcement learning,
C. Chenet al., “Crowd-robot interaction: Crowd-aware robot navigation with attention-based deep reinforcement learning,” in2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 6015–6022
2019
-
[26]
Intention aware robot crowd navigation with attention- based interaction graph,
S. Liuet al., “Intention aware robot crowd navigation with attention- based interaction graph,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 12 015–12 021
2023
-
[27]
Human-aware navigation in crowded envi- ronments using adaptive proxemic area and group detection,
C. Medina-S ´anchezet al., “Human-aware navigation in crowded envi- ronments using adaptive proxemic area and group detection,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 6741–6748
2023
-
[28]
Sampling-based path planning in highly dynamic and crowded pedestrian flow,
K. Caiet al., “Sampling-based path planning in highly dynamic and crowded pedestrian flow,”IEEE Transactions on Intelligent Transporta- tion Systems, vol. 24, no. 12, pp. 14 732–14 742, 2023
2023
-
[29]
Gson: A group-based social navigation framework with large multimodal model,
S. Luoet al., “Gson: A group-based social navigation framework with large multimodal model,”IEEE Robotics and Automation Letters, vol. 10, no. 10, pp. 9646–9653, 2025
2025
-
[30]
Vlm-social-nav: Socially aware robot navigation through scoring using vision-language models,
D. Songet al., “Vlm-social-nav: Socially aware robot navigation through scoring using vision-language models,”IEEE Robotics and Automation Letters, vol. 10, no. 1, pp. 508–515, 2025
2025
-
[31]
D. Helbing and P. Moln ´ar, “Social force model for pedestrian dynamics,”Phys. Rev. E, vol. 51, pp. 4282–4286, May 1995. [Online]. Available: https://link.aps.org/doi/10.1103/PhysRevE.51.4282
-
[32]
Crowds by example,
A. Lerner, Y . Chrysanthou, and D. Lischinski, “Crowds by example,” in Computer graphics forum, vol. 26, no. 3. Wiley Online Library, 2007, pp. 655–664
2007
-
[33]
You’ll never walk alone: Modeling social behavior for multi-target tracking,
S. Pellegriniet al., “You’ll never walk alone: Modeling social behavior for multi-target tracking,” in2009 IEEE 12th International Conference on Computer Vision, 2009, pp. 261–268
2009
-
[34]
Ccp: Configurable crowd profiles,
A. Panayiotouet al., “Ccp: Configurable crowd profiles,” inACM SIGGRAPH 2022 conference proceedings, ser. SIGGRAPH ’22. New York, NY , USA: Association for Computing Machinery, 2022. [Online]. Available: https://doi.org/10.1145/3528233.3530712
-
[35]
Socialgail: Faithful crowd simulation for social robot navigation,
B. Linget al., “Socialgail: Faithful crowd simulation for social robot navigation,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 16 873–16 880
2024
-
[36]
Human motion diffusion model,
G. Tevetet al., “Human motion diffusion model,” inThe Eleventh International Conference on Learning Representations, 2023. [Online]. Available: https://openreview.net/forum?id=SJ1kSyO2jwu
2023
-
[37]
Generating human interaction motions in scenes with text control,
H. Yiet al., “Generating human interaction motions in scenes with text control,” inEuropean Conference on Computer Vision. Springer, 2024, pp. 246–263
2024
-
[38]
Amp: Adversarial motion priors for stylized physics- based character control,
X. B. Penget al., “Amp: Adversarial motion priors for stylized physics- based character control,”ACM Transactions on Graphics (ToG), vol. 40, no. 4, pp. 1–20, 2021
2021
-
[39]
Grab: A dataset of whole-body human grasping of objects,
O. Taheriet al., “Grab: A dataset of whole-body human grasping of objects,” inComputer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, August 23–28, 2020, Proceedings, Part IV 16. Springer, 2020, pp. 581–600
2020
-
[40]
BEHA VIOR-1k: A benchmark for embodied AI with 1,000 everyday activities and realistic simulation,
C. Liet al., “BEHA VIOR-1k: A benchmark for embodied AI with 1,000 everyday activities and realistic simulation,” in6th Annual Conference on Robot Learning, 2022. [Online]. Available: https://openreview.net/forum?id= 8DoIe8G3t
2022
-
[41]
SMPL: A skinned multi-person linear model,
M. Loperet al., “SMPL: A skinned multi-person linear model,”ACM Trans. Graphics (Proc. SIGGRAPH Asia), vol. 34, no. 6, pp. 248:1– 248:16, Oct. 2015
2015
-
[42]
Openai gym,
G. Brockmanet al., “Openai gym,” 2016
2016
-
[43]
Stable-baselines3: Reliable reinforcement learning implementations,
A. Raffinet al., “Stable-baselines3: Reliable reinforcement learning implementations,”Journal of Machine Learning Research, vol. 22, no. 268, pp. 1–8, 2021. [Online]. Available: http://jmlr.org/papers/v22/ 20-1364.html
2021
-
[44]
AMASS: Archive of motion capture as surface shapes,
N. Mahmoodet al., “AMASS: Archive of motion capture as surface shapes,” inInternational Conference on Computer Vision, Oct. 2019, pp. 5442–5451
2019
-
[45]
Attention is all you need,
A. Vaswaniet al., “Attention is all you need,”Advances in neural information processing systems, vol. 30, 2017
2017
-
[46]
Perceiving humans: From monocu- lar 3d localization to social distancing,
L. Bertoni, S. Kreiss, and A. Alahi, “Perceiving humans: From monocu- lar 3d localization to social distancing,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 7401–7418, 2022
2022
-
[47]
Ultralytics yolo11,
G. Jocher and J. Qiu, “Ultralytics yolo11,” 2024. [Online]. Available: https://github.com/ultralytics/ultralytics
2024
-
[48]
Hivt: Hierarchical vector transformer for multi-agent motion prediction,
Z. Zhouet al., “Hivt: Hierarchical vector transformer for multi-agent motion prediction,” in2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022, pp. 8813–8823
2022
-
[49]
Proximal policy optimization algorithms,
J. Schulmanet al., “Proximal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
Pith/arXiv arXiv 2017
-
[50]
Fast-lio: A fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman filter,
W. Xu and F. Zhang, “Fast-lio: A fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman filter,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3317–3324, 2021
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.