2-Head 2D Returning Finite Automata
Pith reviewed 2026-06-26 02:06 UTC · model grok-4.3
The pith
Two-head returning finite automata accept picture languages incomparable to context-free matrix grammars but properly contained in those of returning pushdown automata.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
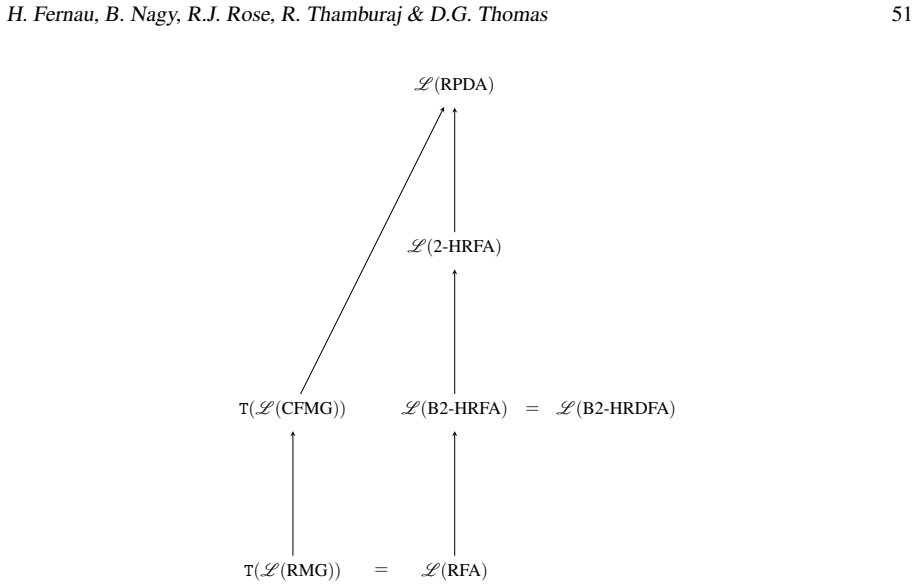
The authors introduce 2-HRFA in which two heads move oppositely across rectangular arrays and return after each pass; they establish that the accepted languages are incomparable with CFMG languages while forming a proper subset of RPDA languages. They further define B2-HRFA with synchronized stepwise head motion and prove the chain RFA ⊂ B2-HRFA ⊂ 2-HRFA, together with selected closure properties.
What carries the argument
Two-head returning finite automata (2-HRFA) whose heads traverse rectangular arrays in opposite directions and return after each sweep, together with the synchronized B2-HRFA restriction.
If this is right
- The languages accepted by 2-HRFA properly contain those of B2-HRFA, which properly contain those of ordinary returning finite automata.
- The 2-HRFA class is strictly weaker than returning pushdown automata on rectangular arrays.
- There exist picture languages accepted by 2-HRFA that are not generated by any context-free matrix grammar, and vice versa.
- Both 2-HRFA and B2-HRFA families are closed under certain array operations whose exact list is determined by the paper's constructions.
Where Pith is reading between the lines
- The opposite-head movement may capture bilateral or mirror patterns more directly than single-head models.
- The synchronization constraint in B2-HRFA offers a tunable parameter for trading expressive power against implementation simplicity.
- The established hierarchy could be used to classify additional two-dimensional language families by inserting them between the known levels.
Load-bearing premise
The formal definitions of head movement, returning behavior, and acceptance conditions, together with the constructions used in the inclusion and incomparability proofs, are correct and complete.
What would settle it
A single rectangular array language that is accepted by some 2-HRFA yet rejected by every returning pushdown automaton, or a language generated by some context-free matrix grammar that is neither contained in nor contains the 2-HRFA class.
Figures
read the original abstract
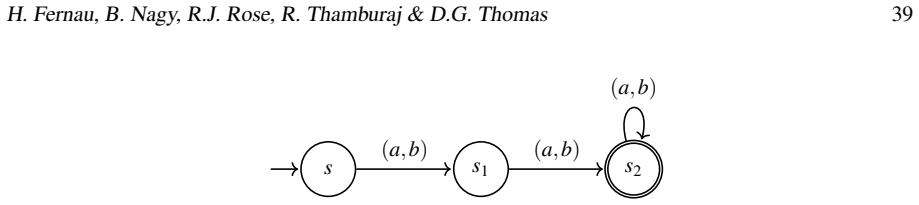
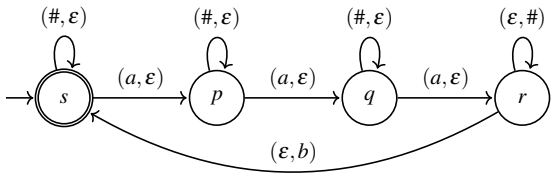
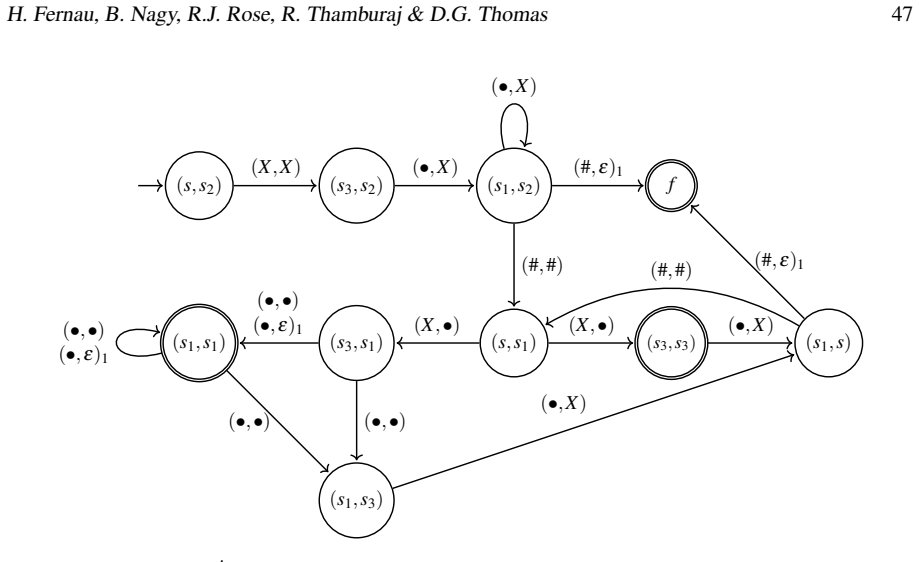
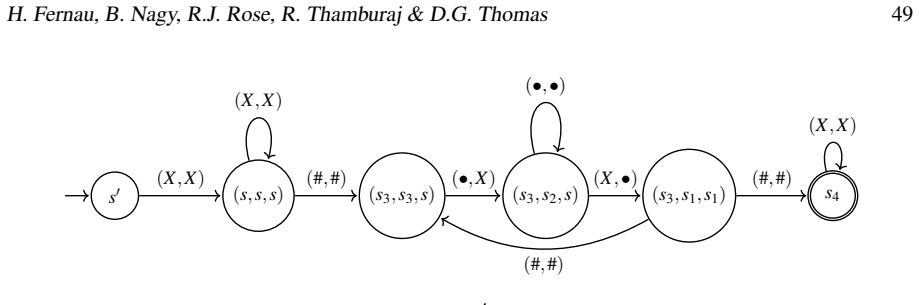
We introduce and study a family of two-head finite automata called two head returning finite automata (2-HRFA) operating on rectangular arrays of picture languages, in which both heads move in opposite directions. We show that the class of picture languages accepted by 2-HRFA is incomparable with the class of languages generated by context-free matrix grammars (CFMG), while it forms a proper subset of the class of languages accepted by returning pushdown automata (RPDA). In addition, we define a constrained variant, both head stepping two head returning finite automata (B2-HRFA), in which both heads are required to move in a synchronized, stepwise fashion. We prove that the class of languages accepted by returning finite automata (RFA) is a proper subset of the class of languages accepted by B2-HRFA, which in turn is a proper subset of the class of languages accepted by 2-HRFA. Closure properties for both the families of languages accepted by 2-HRFA and B2-HRFA are also investigated.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces 2-head returning finite automata (2-HRFA) operating on rectangular arrays where both heads move in opposite directions. It claims that the class of picture languages accepted by 2-HRFA is incomparable with those generated by context-free matrix grammars (CFMG) and forms a proper subset of those accepted by returning pushdown automata (RPDA). A constrained variant B2-HRFA is defined with synchronized stepwise head movement, and the paper proves the hierarchy RFA ⊂ B2-HRFA ⊂ 2-HRFA along with closure properties for both families.
Significance. If the constructions and proofs hold, the work contributes to the theory of two-dimensional languages by establishing new automata models, their position relative to CFMG and RPDA, and a strict hierarchy among returning finite automata variants. The explicit constructions for incomparability and proper inclusions would be a strength, as would the investigation of closure properties.
minor comments (1)
- The abstract and reader's summary reference specific constructions for the incomparability with CFMG and the inclusions with RPDA, but without section numbers or explicit definitions of acceptance conditions and head movements in the provided text, it is not possible to verify edge cases or completeness of the proofs.
Simulated Author's Rebuttal
We thank the referee for their summary of the manuscript. No specific major comments were provided in the report, so we are unable to address particular points of concern regarding the constructions, proofs, or results. We remain available to respond to any detailed feedback on the incomparability with CFMG, the inclusions with RPDA and RFA, the B2-HRFA variant, or the closure properties.
Circularity Check
No significant circularity identified
full rationale
The paper introduces new models (2-HRFA and B2-HRFA) via explicit definitions of head movement and acceptance, then establishes relations to prior independent classes (CFMG, RPDA, RFA) through constructions and proofs of inclusion/incomparability. No equations, parameters, or self-referential reductions appear; all steps rely on standard automata-theoretic arguments against externally defined models with no load-bearing self-citation chains or fitted inputs renamed as predictions. The derivation chain is self-contained.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Standard definitions of finite automata, picture languages over rectangular arrays, and returning behavior from prior literature.
invented entities (2)
-
2-HRFA
no independent evidence
-
B2-HRFA
no independent evidence
Reference graph
Works this paper leans on
-
[1]
V . Amar & G. Putzolu (1964): On a family of linear grammars . Information and Control 7, pp. 283–291, doi:10.1016/S0019-9958(64)90294-3
-
[2]
M. Blum & C. Hewitt (1967): Automata on a 2-dimensional Tape . In: Proceedings of the 8th Annual Symposium on Switching and Automata Theory (SW AT), IEEE, pp. 155–160, doi:10.1109/FOCS.1967.6
-
[3]
H. Fernau, R. Freund & M. Holzer (1998): Character recognition with k-head finite array automata . In A. Amin, D. Dori, P. Pudil & H. Freeman, editors:Advances in Pattern Recognition, Joint IAPR International Workshops SSPR ’98 and SPR ’98, LNCS 1451, Springer, pp. 282–291, doi:10.1007/BFb0033246
-
[4]
Fernau, R
H. Fernau, R. Freund & M. Holzer (1999): Regulated array grammars of finite index . In Gh. P ˘aun & A. Salomaa, editors: Grammatical Models of Multi-Agent Systems, London: Gordon and Breach, pp. 157– 181 (Part I) and 284–296 (Part II)
1999
-
[5]
Novel Pathways ink-Contact Geometry
H. Fernau, R. J.Rose, R.Thamburaj & D. G.Thomas (2026): Boustrophedon pushdown automata for two- dimensional picture languages. In P. Balázs, R. P. Barneva, V . E. Brimkov & A. Nagy, editors:Combinato- rial Image Analysis, LNCS 15985, Springer Nature Switzerland, Cham, pp. 35–50, doi:10.1007/978-3-032- 19347-6_3
-
[6]
H. Fernau, M. Paramasivan, M. L. Schmid & D. G. Thomas (2018): Simple picture processing based on finite automata and regular grammars . Journal of Computer and System Sciences 95, pp. 232–258, doi:10.1016/j.jcss.2017.07.011
-
[7]
Fernau, M
H. Fernau, M. Paramasivan & D. G. Thomas (2018): Picture Scanning Automata and Group Actions on Pictures. Romanian Journal of Information Science and Technology 21(3), pp. 238–248. 52 2-Head 2D Returning Finite Automata
2018
-
[8]
H. Fernau & J. M. Sempere (2000): Permutations and control sets for learning non-regular language families. In A. L. Oliveira, editor:Grammatical Inference: Algorithms and Applications, 5th International Colloquium ICGI 2000, LNCS/LNAI 1891, Springer, pp. 75–88, doi:10.1007/978-3-540-45257-7_7
-
[9]
In: Handbook of formal lan- guages: volume 3 beyond words , Springer, pp
D. Giammarresi & A. Restivo (1997): Two-dimensional languages. In G. Rozenberg & A. Salomaa, editors: Handbook of Formal Languages, 3, Springer, Berlin, pp. 215–267, doi:10.1007/978-3-642-59126-6_4
-
[10]
S. Ginsburg & E. H. Spanier (1966): Finite-turn pushdown automata. SIAM Journal of Control 4(3), pp. 429–453, doi:10.1137/0304034
-
[11]
J. E. Hopcroft & J. D. Ullman (1979): Introduction to Automata Theory, Languages, and Computation . Reading (MA): Addison-Wesley
1979
-
[12]
Hromkovic (1985): On one-way two-head deterministic finite state automata
J. Hromkovic (1985): On one-way two-head deterministic finite state automata . Computers and Artificial Intelligence 4(6), pp. 503–526, doi:10.5555/1787385.1787418
-
[13]
K. Krithivasan & R. Siromoney (1974): Characterizations of regular and context-free matrices. International Journal of Computer Mathematics 4(A), pp. 229–245, doi:10.1080/00207167408803090
-
[14]
R. Loukanova (2007): Linear context-free languages. In C. B. Jones, Z. Liu & J. Woodcock, editors: The- oretical Aspects of Computing – ICTAC 2007, LNCS 4711, Springer, pp. 351–365, doi:10.1007/978-3-540- 75292-9_24
-
[15]
Nagy (2010): 5 ′ → 3′ Sensing Watson-Crick Finite Automata
B. Nagy (2010): 5 ′ → 3′ Sensing Watson-Crick Finite Automata . In G. P. C. Fung, editor: Sequence and Genome Analysis II – Methods and Applications, iConcept Press, pp. 39–56
2010
-
[16]
Nagy (2012): A class of 2-head finite automata for linear languages
B. Nagy (2012): A class of 2-head finite automata for linear languages . Triangle 8, pp. 89–99, doi:10.17345/triangle8.89-99
-
[17]
B. Nagy & S. Parchami (2021): On deterministic sensing 5′ → 3′ Watson–Crick finite automata: a full hierarchy in 2detLIN. Acta Informatica 58(3), pp. 153–175, doi:10.1007/s00236-019-00362-6
-
[18]
B. Nagy, S. Parchami & H. Mir-Mohammad-Sadeghi (2017): A New Sensing 5′ → 3′ Watson-Crick Automata Concept. In E. Csuhaj-Varjú, P. Dömösi & Gy. Vaszil, editors:Proc. 15th Int. Conf. on Automata and Formal Languages, AFL 2017, Debrecen, Hungary, 2017, EPTCS 252, pp. 195–204, doi:10.4204/EPTCS.252.19
-
[19]
A. L. Rosenberg (1966): On multi-head finite automata. IBM Journal of Research and Development 10(5), pp. 388–394, doi:10.1147/rd.105.0388
-
[20]
J. M. Sempere & P. García (1994): A characterization of even linear languages and its application to the learning problem. In R. C. Carrasco & J. Oncina, editors: Proc. Second Int. Colloquium on Grammati- cal Inference (ICGI-94): Grammatical Inference and Applications , LNCS/LNAI 862, Springer, pp. 38–44, doi:10.1007/3-540-58473-0_135
-
[21]
G. Siromoney, R. Siromoney & K. Krithivasan (1972): Abstract families of matrices and picture languages. Computer Graphics and Image Processing 1, pp. 284–307, doi:10.1016/S0146-664X(72)80019-4
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.