Geometry-Preserving Reduced-Order Modeling via Immersed Tensor Decomposition (ITD)
Pith reviewed 2026-06-29 03:56 UTC · model grok-4.3
The pith
The Immersed Tensor Decomposition framework enforces Dirichlet boundary conditions exactly by multiplying the trial function with a body-fitted function Φ on regular voxel meshes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
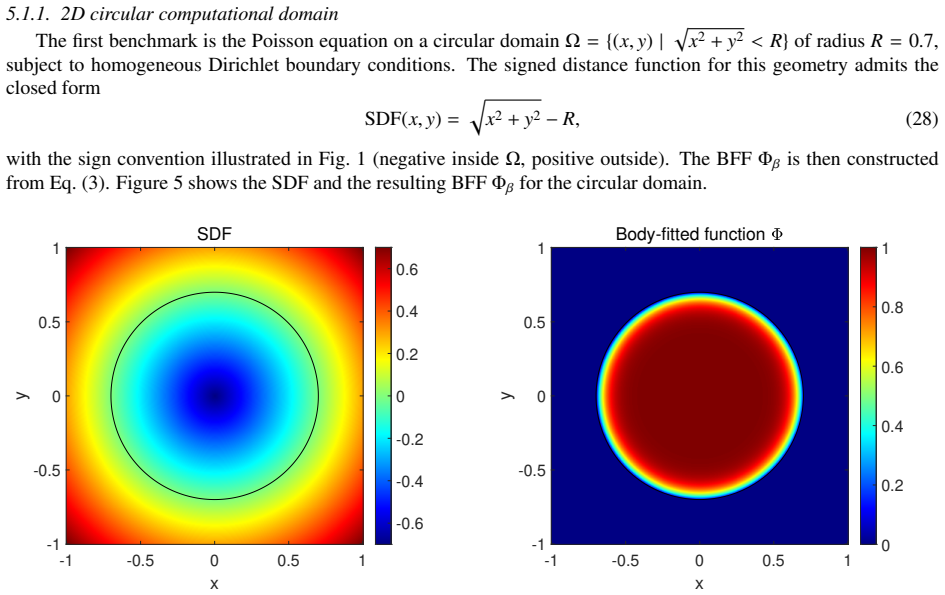
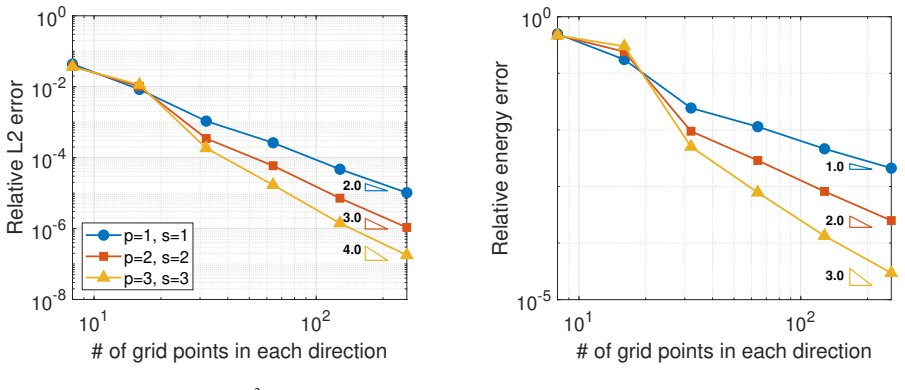
The central contribution is an exact Dirichlet formulation that enforces the boundary condition strongly by multiplying the trial function with Φ, so that u=g holds by construction without any variational penalty or interface quadrature. We establish an a priori error estimate for the formulation and assess it on canonical 2D/3D domains, demonstrating optimal convergence and robustness on non-Cartesian geometries discretized by regular voxel meshes.
What carries the argument
The body-fitted function Φ that is multiplied with the trial function to enforce boundary conditions strongly while maintaining tensor-product structure for reduced-order tensor decomposition.
If this is right
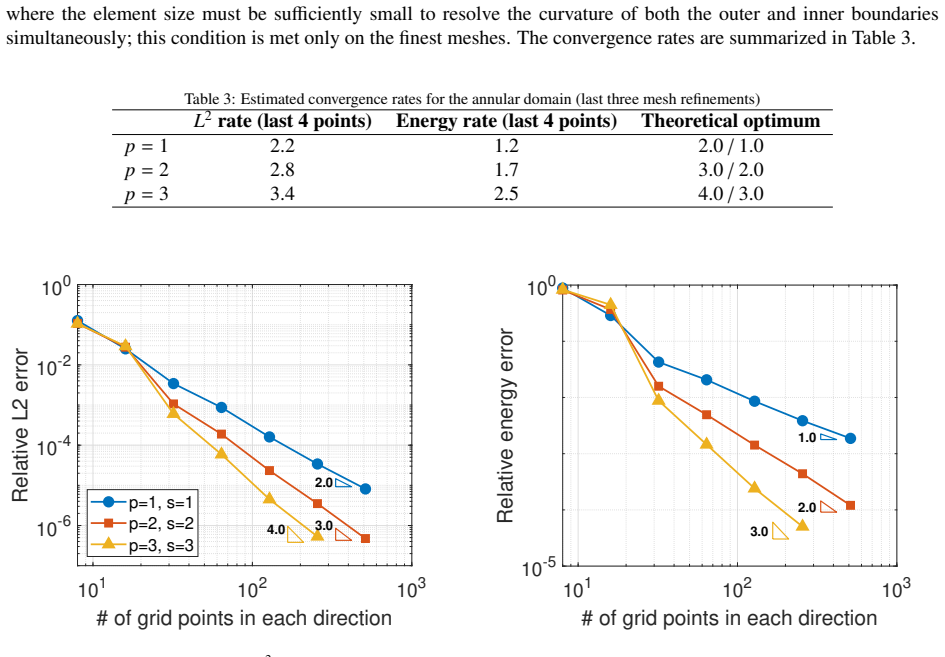
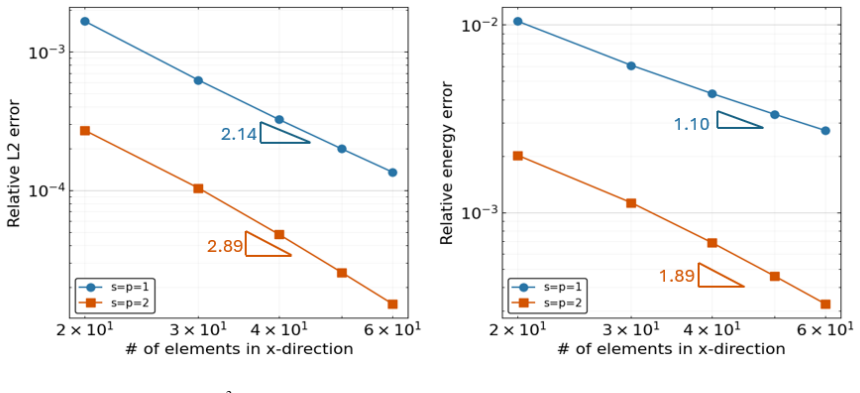
- Optimal convergence rates are achieved for fixed grid spacing by increasing the interpolation degree p.
- No variational penalty terms or interface quadrature are needed for boundary conditions.
- The method supports simulations on geometrically imperfect CAD, image-based data, and voxel-native designs.
- Robust performance is demonstrated on non-Cartesian geometries in two and three dimensions.
Where Pith is reading between the lines
- The framework could lower the mesh generation bottleneck in biomedical engineering and additive manufacturing applications.
- It may be combined with other separable reduced-order methods that benefit from Cartesian background grids.
- Extensions to time-dependent or nonlinear problems could test the preservation of the tensor structure under the immersed formulation.
Load-bearing premise
The body-fitted function Φ can be constructed to approximate the true boundary with controllable error while preserving the tensor-product structure required by the reduced-order solver on a regular background grid.
What would settle it
Numerical tests on a non-Cartesian geometry with a regular voxel mesh showing convergence rates lower than the predicted optimal order would falsify the a priori error estimate.
Figures
read the original abstract
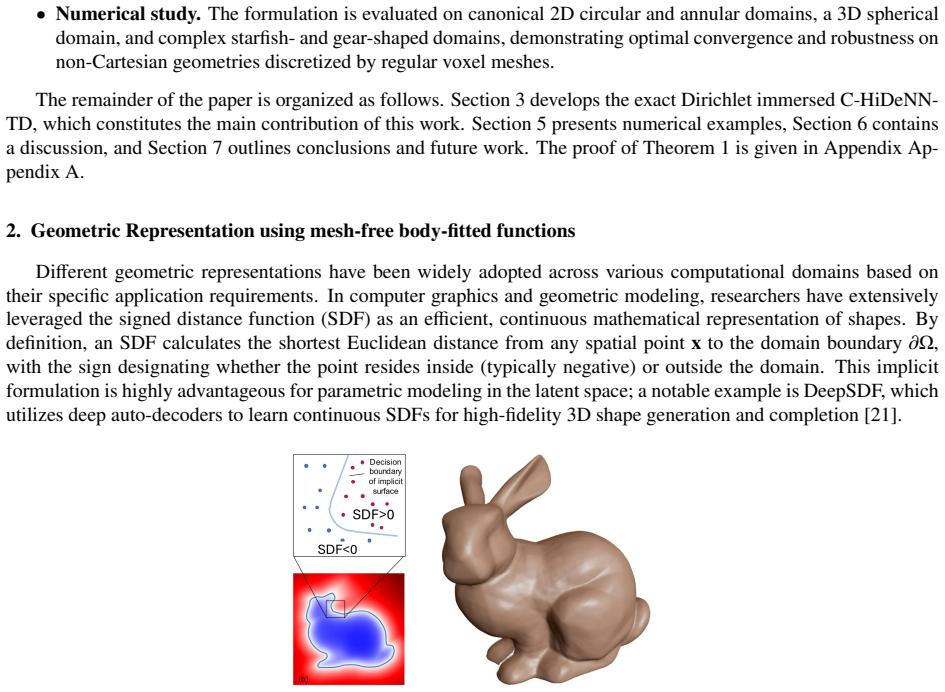
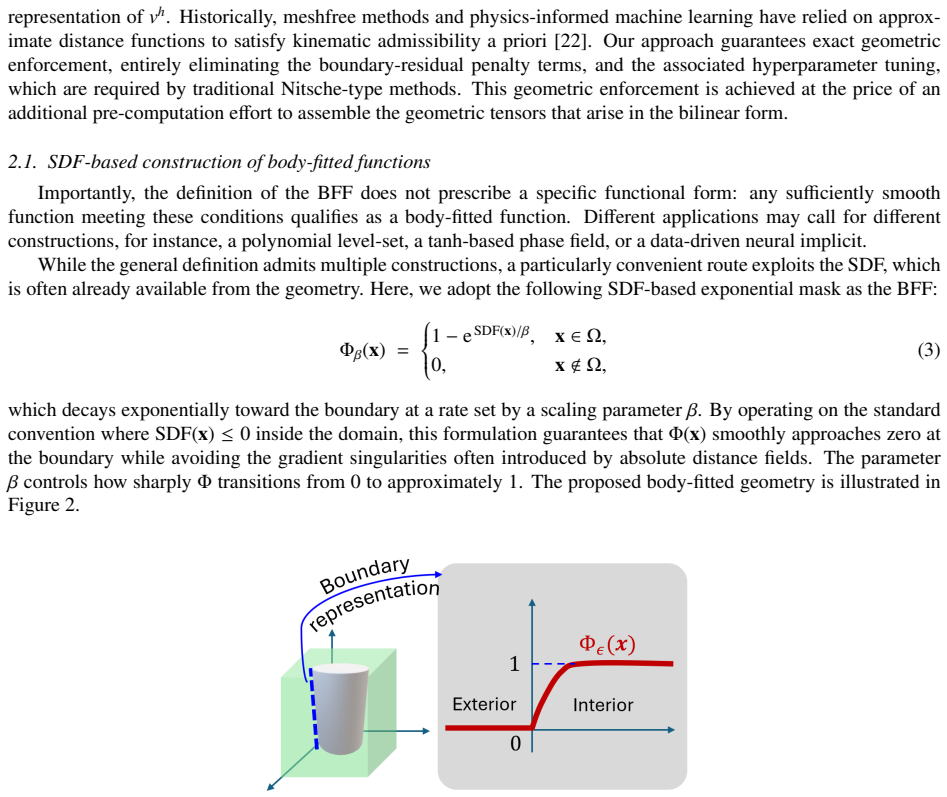
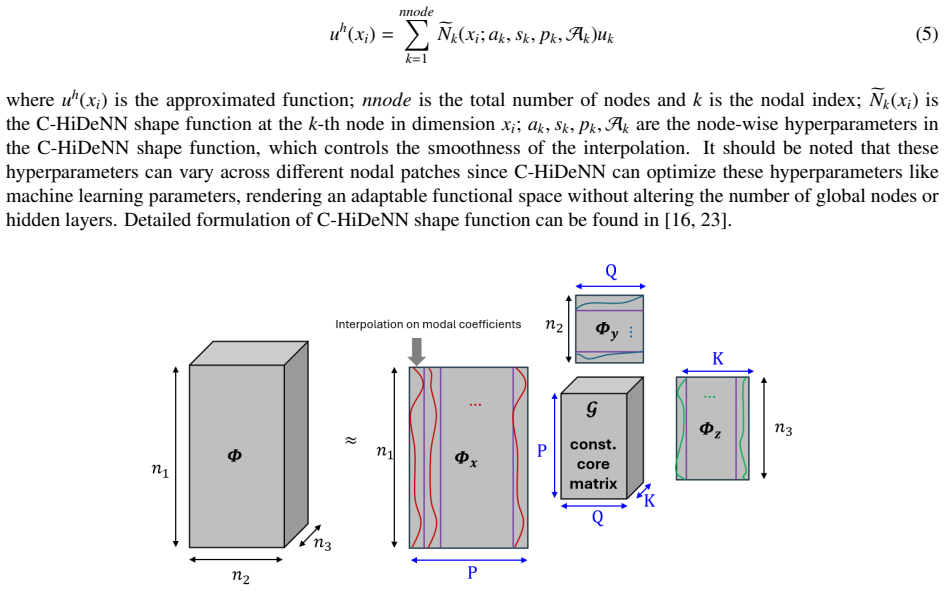
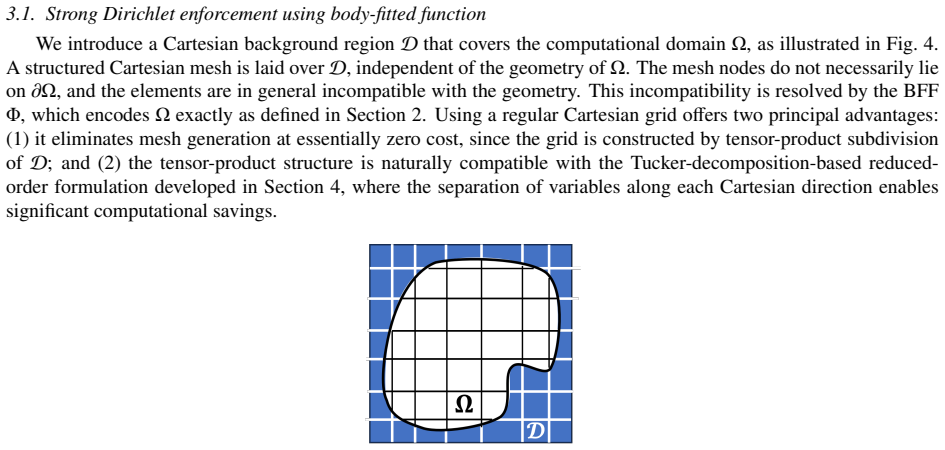
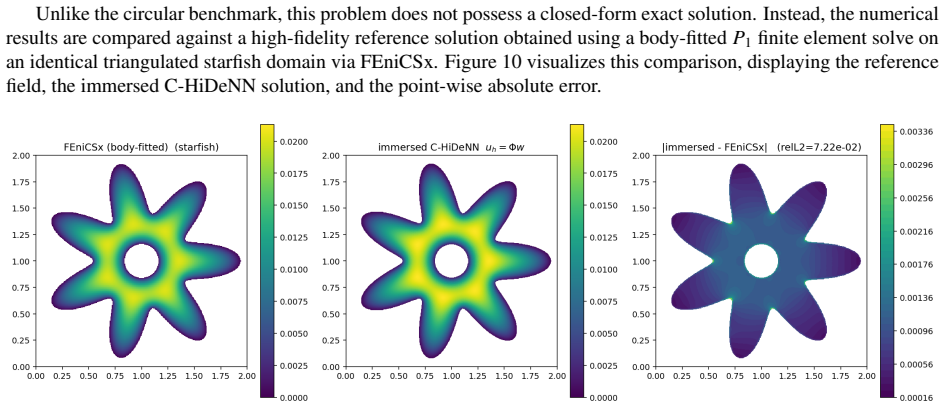
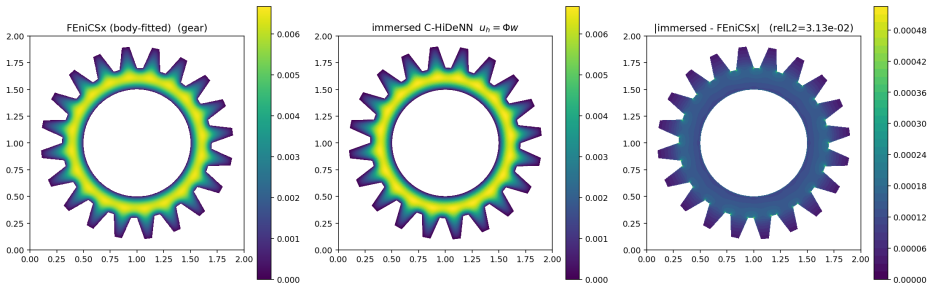
Body-fitted finite-element methods deliver high-order accuracy but hinge on a clean, watertight, conforming mesh, a requirement that breaks down for the geometrically imperfect CAD assemblies, image-based volumetric data, and voxel-native designs that pervade biomedical engineering and additive manufacturing, where mesh generation has become the dominant cost of the analysis cycle. Immersed methods on regular background Cartesian grids sidestep body-fitted meshing, but classical implementations integrate over irregular cut subdomains, destroying the tensor-product structure that enables separable, reduced-order methods such as tensor decomposition. In this paper we propose the \emph{Immersed Tensor Decomposition} (ITD) framework, which couples a mesh-free geometric representation via body-fitted function with the separable C-HiDeNN-TD reduced-order solver to enable large-scale simulation directly on regular background voxel meshes. The geometry is encoded in three steps: a signed-distance function represents the boundary, a body-fitted function $\Phi$ approximates it with controllable error, and a low-rank Tucker decomposition provides model-order reduction; for a fixed grid spacing $h$, accuracy is improved by raising the approximation order of C-HiDeNN interpolation up to degree $p$ with a linear background mesh. The central contribution is an exact Dirichlet formulation that enforces the boundary condition strongly by multiplying the trial function with $\Phi$, so that $u=g$ holds by construction without any variational penalty or interface quadrature. We establish an a priori error estimate for the formulation and assess it on canonical 2D/3D domains, demonstrating optimal convergence and robustness on non-Cartesian geometries discretized by regular voxel meshes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes the Immersed Tensor Decomposition (ITD) framework for geometry-preserving reduced-order modeling on regular Cartesian voxel meshes. Geometry is encoded via a signed-distance function, a body-fitted multiplier Φ that approximates the boundary with controllable error, and low-rank Tucker decomposition within the C-HiDeNN-TD solver. The central technical contribution is an exact strong enforcement of Dirichlet conditions by setting the trial function to u = Φ v (with v free), avoiding penalties or cut-cell quadrature. The authors derive an a priori error estimate for this formulation and report numerical experiments on canonical 2D/3D domains showing optimal convergence rates under C-HiDeNN interpolation order p on non-body-fitted grids.
Significance. If the low-rank preservation and error estimate hold, the method would enable high-order immersed simulations with separable reduced-order efficiency on voxel data, addressing a major bottleneck in biomedical and additive-manufacturing workflows where body-fitted meshing is prohibitive. The explicit a priori estimate and the exact (non-variational) Dirichlet treatment are concrete strengths that distinguish the work from standard immersed or penalty-based approaches.
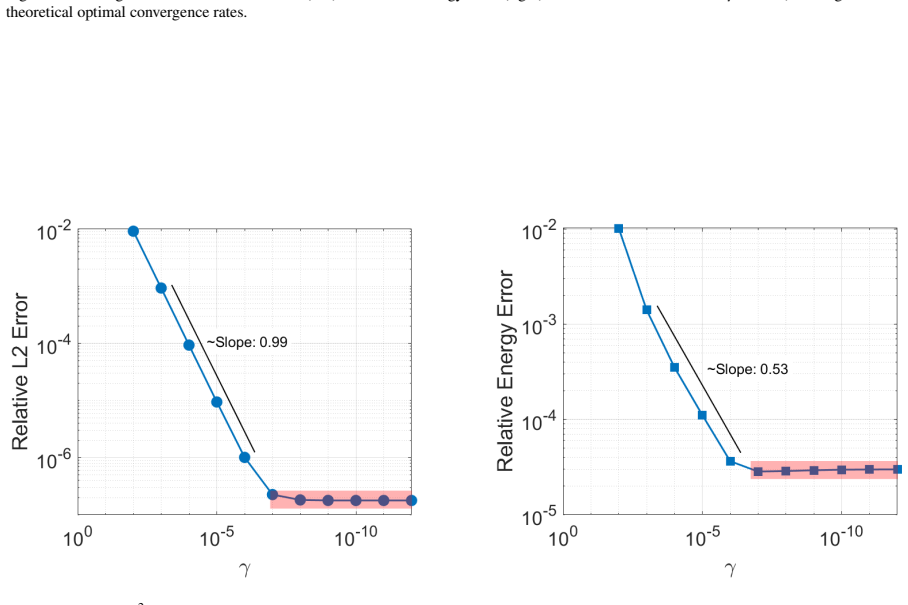
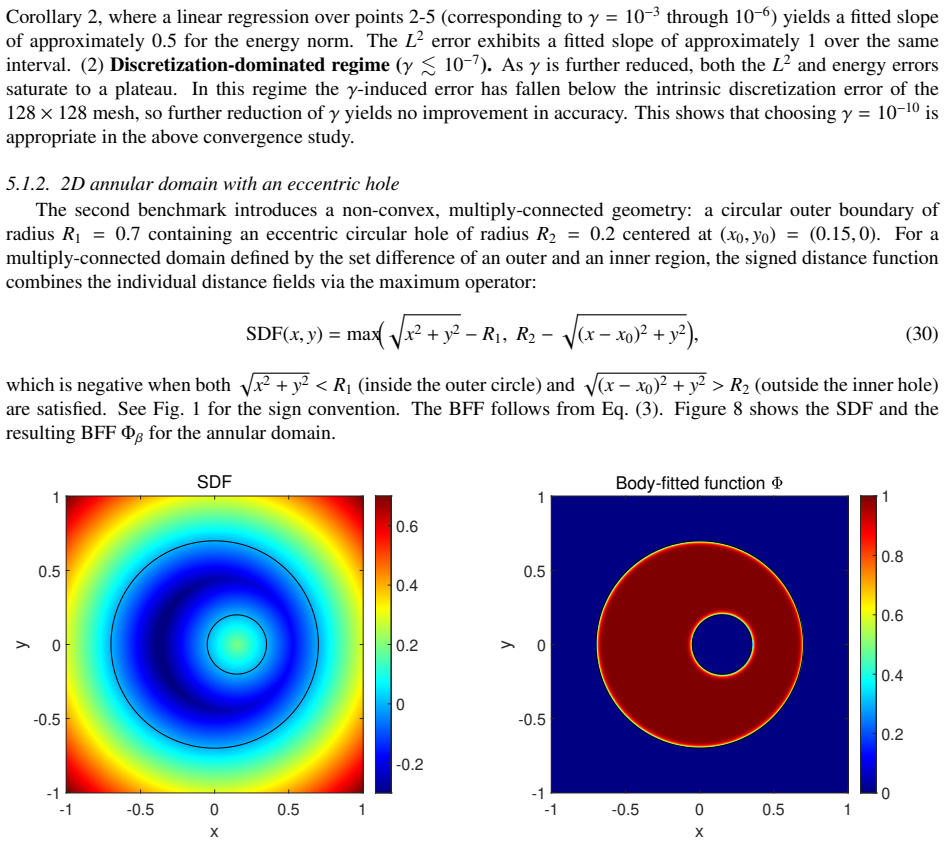
major comments (2)
- [§3, §4] §3 (Formulation) and §4 (Error Analysis): The exact Dirichlet statement u = Φ v is load-bearing for the claimed absence of interface quadrature and for the a priori estimate. However, the manuscript provides no analysis showing that multiplication by a high-order approximation to the signed-distance function preserves the low-rank Tucker structure required by C-HiDeNN-TD; a generic Φ of order p will generally produce a full-rank tensor on a non-Cartesian boundary, which would invalidate both the reduced-order cost scaling and the optimal-convergence claim on voxel meshes.
- [§5] §5 (Numerical Results): The reported optimal convergence rates on 2D/3D test cases are presented without accompanying data on the effective Tucker rank of the decomposed solution after multiplication by Φ. If rank grows with geometry complexity or with p, the numerical evidence does not yet substantiate that the method retains the separable efficiency advertised for large-scale voxel simulations.
minor comments (2)
- [§2] Notation for the body-fitted function Φ and its approximation order should be introduced once with a clear definition (e.g., in §2) rather than appearing first in the abstract and then again in §3.
- [Abstract] The abstract states that accuracy is improved “by raising the approximation order of C-HiDeNN interpolation up to degree p with a linear background mesh”; this phrasing is slightly ambiguous and should be clarified to indicate whether the background mesh remains linear while only the C-HiDeNN basis order is increased.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on the ITD framework. We address each major comment below and will revise the manuscript accordingly to strengthen the presentation of rank preservation and supporting numerical data.
read point-by-point responses
-
Referee: [§3, §4] §3 (Formulation) and §4 (Error Analysis): The exact Dirichlet statement u = Φ v is load-bearing for the claimed absence of interface quadrature and for the a priori estimate. However, the manuscript provides no analysis showing that multiplication by a high-order approximation to the signed-distance function preserves the low-rank Tucker structure required by C-HiDeNN-TD; a generic Φ of order p will generally produce a full-rank tensor on a non-Cartesian boundary, which would invalidate both the reduced-order cost scaling and the optimal-convergence claim on voxel meshes.
Authors: We agree that the manuscript lacks an explicit analysis of how multiplication by the body-fitted function Φ affects the Tucker rank of the solution. The formulation defines u = Φ v with v obtained via C-HiDeNN-TD, but no rank bound or preservation argument for the product is derived. We will add a dedicated subsection in §3 or §4 of the revision that examines the rank of Φv, either through algebraic arguments on the separability of Φ or by providing conditions under which the rank growth remains controlled for the signed-distance-based construction of Φ. revision: yes
-
Referee: [§5] §5 (Numerical Results): The reported optimal convergence rates on 2D/3D test cases are presented without accompanying data on the effective Tucker rank of the decomposed solution after multiplication by Φ. If rank grows with geometry complexity or with p, the numerical evidence does not yet substantiate that the method retains the separable efficiency advertised for large-scale voxel simulations.
Authors: The referee correctly notes the absence of Tucker-rank data in the numerical section. Although the reported convergence rates are optimal, the manuscript does not quantify the effective ranks after multiplication by Φ. In the revised version we will augment §5 with tables (or plots) reporting the observed Tucker ranks for each 2D/3D test case as functions of polynomial degree p and geometry complexity, thereby directly addressing whether the separable efficiency is retained. revision: yes
Circularity Check
No significant circularity; formulation presented as independent construction
full rationale
The abstract presents the ITD framework and exact Dirichlet enforcement (u = Φ v) as a proposed formulation choice that holds by construction, backed by an a priori error estimate and numerical tests on canonical domains. No quoted equations, fitted parameters renamed as predictions, or self-citation chains reduce the central claims to inputs by definition. The tensor-structure preservation of Φ is listed as a modeling assumption rather than a derived equivalence, and the work is self-contained against external benchmarks without load-bearing reductions.
Axiom & Free-Parameter Ledger
invented entities (1)
-
body-fitted function Φ
no independent evidence
Reference graph
Works this paper leans on
-
[1]
The finite element method: linear static and dynamic finite element analysis
Thomas JR Hughes. The finite element method: linear static and dynamic finite element analysis . Courier Corporation, 2003
2003
-
[2]
T. J. R. Hughes, J. A. Cottrell, and Y . Bazilevs. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Computer Methods in Applied Mechanics and Engineering , 194(39–41):4135– 4195, 2005. doi: 10.1016 /j.cma.2004.10.008
2005
-
[3]
The finite cell method: A review in the context of higher-order structural analysis of CAD and image-based geometric models
Dominik Schillinger and Martin Ruess. The finite cell method: A review in the context of higher-order structural analysis of CAD and image-based geometric models. Archives of Computational Methods in Engineering , 22 (3):391–455, 2015. doi: 10.1007 /s11831-014-9115-y
2015
-
[4]
E fficient calibration strategy for crystal plasticity constitutive law to model additively manufactured alloys
Sourav Saha, Jiachen Guo, Chanwook Park, Reza Batley, and Wing Kam Liu. E fficient calibration strategy for crystal plasticity constitutive law to model additively manufactured alloys. Integrating Materials and Manufac- turing Innovation, 14(4):679–694, 2025. 22
2025
-
[5]
Finite cell method: h- and p-extension for embed- ded domain problems in solid mechanics
Jamshid Parvizian, Alexander Düster, and Ernst Rank. Finite cell method: h- and p-extension for embed- ded domain problems in solid mechanics. Computational Mechanics , 41(1):121–133, 2007. doi: 10.1007 / s00466-007-0173-y
2007
-
[6]
A. Düster, J. Parvizian, Z. Y ang, and E. Rank. The finite cell method for three-dimensional problems of solid mechanics. Computer Methods in Applied Mechanics and Engineering , 197(45–48):3768–3782, 2008. doi: 10.1016/j.cma.2008.02.036
-
[7]
J. Nitsche. Über ein variationsprinzip zur lösung von dirichlet-problemen bei verwendung von teilräumen, die keinen randbedingungen unterworfen sind. Abhandlungen aus dem Mathematischen Seminar der Universität Hamburg, 36(1):9–15, 1971. doi: 10.1007 /BF02995904
1971
-
[8]
Imposing Dirichlet boundary conditions with Nitsche’s method and spline-based finite elements
Anand Embar, John Dolbow, and Isaac Harari. Imposing Dirichlet boundary conditions with Nitsche’s method and spline-based finite elements. International Journal for Numerical Methods in Engineering , 83(7):877–898,
-
[9]
doi: 10.1002 /nme.2863
-
[10]
Fictitious domain finite element methods using cut elements: I
Erik Burman and Peter Hansbo. Fictitious domain finite element methods using cut elements: I. A stabilized Lagrange multiplier method. Computer Methods in Applied Mechanics and Engineering , 199(41–44):2680– 2686, 2010. doi: 10.1016 /j.cma.2010.05.011
2010
-
[11]
Fictitious domain finite element methods using cut elements: II
Erik Burman and Peter Hansbo. Fictitious domain finite element methods using cut elements: II. A stabilized Nitsche method. Applied Numerical Mathematics , 62(4):328–341, 2012. doi: 10.1016 /j.apnum.2011.01.008
2012
-
[12]
ϕ-FEM: A finite element method on domains defined by level-sets
Michel Duprez and Alexei Lozinski. ϕ-FEM: A finite element method on domains defined by level-sets. SIAM Journal on Numerical Analysis , 58(2):1008–1028, 2020. doi: 10.1137 /19M1248947
2020
-
[13]
Michel Duprez, V anessa Lleras, and Alexei Lozinski. ϕ-FEM: An optimally convergent and easily imple- mentable immersed boundary method for particulate flows and Stokes equations. ESAIM: Mathematical Mod- elling and Numerical Analysis , 57(3):1111–1142, 2023. doi: 10.1051 /m2an/2023010
arXiv 2023
-
[14]
Main and G
A. Main and G. Scovazzi. The shifted boundary method for embedded domain computations. Part I: Poisson and Stokes problems. Journal of Computational Physics , 372:972–995, 2018. doi: 10.1016 /j.jcp.2017.10.026
2018
-
[15]
Ammar, B
A. Ammar, B. Mokdad, F. Chinesta, and R. Keunings. A new family of solvers for some classes of multidi- mensional partial di fferential equations encountered in kinetic theory modeling of complex fluids. Journal of Non-Newtonian Fluid Mechanics, 139(3):153–176, 2006. doi: 10.1016 /j.jnnfm.2006.07.007
2006
-
[16]
Recent advances and new challenges in the use of the proper generalized decomposition for solving multidimensional models
Francisco Chinesta, Amine Ammar, and Elías Cueto. Recent advances and new challenges in the use of the proper generalized decomposition for solving multidimensional models. Archives of Computational Methods in Engineering, 17(4):327–350, 2010. doi: 10.1007 /s11831-010-9049-y
2010
-
[17]
Apley, Gregory J
Y e Lu, Hengyang Li, Lei Zhang, Chanwook Park, Satyajit Mojumder, Stefan Knapik, Zhongsheng Sang, Shao- qiang Tang, Daniel W. Apley, Gregory J. Wagner, and Wing Kam Liu. Convolution hierarchical deep-learning neural networks (C-HiDeNN): finite elements, isogeometric analysis, tensor decomposition, and beyond. Com- putational Mechanics, 72(2):333–362, 2023....
2023
-
[18]
Jiachen Guo, Chanwook Park, Xiaoyu Xie, Zhongsheng Sang, Gregory J. Wagner, and Wing Kam Liu. Convo- lutional hierarchical deep learning neural networks-tensor decomposition (C-HiDeNN-TD): a scalable surrogate modeling approach for large-scale physical systems, 2024. arXiv:2409.00329
arXiv 2024
-
[19]
Wagner, Dong Qian, Jian Cao, Thomas J
Jiachen Guo, Gino Domel, Chanwook Park, Hantao Zhang, Ozgur Can Gumus, Y e Lu, Gregory J. Wagner, Dong Qian, Jian Cao, Thomas J. R. Hughes, and Wing Kam Liu. Tensor-decomposition-based a priori surrogate (TAPS) modeling for ultra large-scale simulations. Computer Methods in Applied Mechanics and Engineering , 444:118101, 2025. doi: 10.1016 /j.cma.2025.118101
arXiv 2025
-
[20]
X. Li, J. Lowengrub, A. Rätz, and A. V oigt. Solving PDEs in complex geometries: a di ffuse domain approach. Communications in Mathematical Sciences , 7(1):81–107, 2009. doi: 10.4310 /CMS.2009.v7.n1.a4. 23
2009
-
[21]
Martin Burger, Ole Løseth Elvetun, and Matthias Schlottbom. Analysis of the di ffuse domain method for second order elliptic boundary value problems. F oundations of Computational Mathematics, 17(3):627–674, 2017. doi: 10.1007/s10208-015-9292-6
-
[22]
DeepSDF: Learning continuous signed distance functions for shape representation
Jeong Joon Park, Peter Florence, Julian Straub, Richard Newcombe, and Steven Lovegrove. DeepSDF: Learning continuous signed distance functions for shape representation. In Proceedings of the IEEE /CVF Conference on Computer Vision and Pattern Recognition, pages 165–174, 2019
2019
-
[23]
Exact imposition of boundary conditions with distance functions in physics- informed deep neural networks
N Sukumar and Ankit Srivastava. Exact imposition of boundary conditions with distance functions in physics- informed deep neural networks. Computer Methods in Applied Mechanics and Engineering , 389:114333, 2022
2022
-
[24]
Convolution hierarchical deep-learning neural network (c-hidenn) with graphics processing unit (gpu) acceleration
Chanwook Park, Y e Lu, Sourav Saha, Tianju Xue, Jiachen Guo, Satyajit Mojumder, Daniel W Apley, Gregory J Wagner, and Wing Kam Liu. Convolution hierarchical deep-learning neural network (c-hidenn) with graphics processing unit (gpu) acceleration. Computational Mechanics, 72(2):383–409, 2023
2023
-
[25]
The di ffuse nitsche method: Dirichlet constraints on phase-field boundaries
Lam H Nguyen, Stein KF Stoter, Martin Ruess, Manuel A Sanchez Uribe, and Dominik Schillinger. The di ffuse nitsche method: Dirichlet constraints on phase-field boundaries. International Journal for Numerical Methods in Engineering, 113(4):601–633, 2018
2018
-
[26]
Intégrales singulières et fonctions di fférentiables de plusieurs vari- ables
Elias M Stein, M Bachvan, and A Somen. Intégrales singulières et fonctions di fférentiables de plusieurs vari- ables. Fac. des Sciences, 1967
1967
-
[27]
Singular integrals and di fferentiability properties of functions
Elias M Stein. Singular integrals and di fferentiability properties of functions . Number 30. Princeton university press, 1970
1970
-
[28]
Level set methods and fast marching methods , volume 98
James A Sethian et al. Level set methods and fast marching methods , volume 98. Cambridge Cambridge UP , 1999. 24
1999
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.