PACR: Parameter-Optimized AC Power Flow Restoration for AC Feasible DCOPF Dispatch
Pith reviewed 2026-06-30 08:30 UTC · model grok-4.3
The pith
A differentiable AC restoration with offline-trained parameters maps DC dispatches to feasible AC points.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
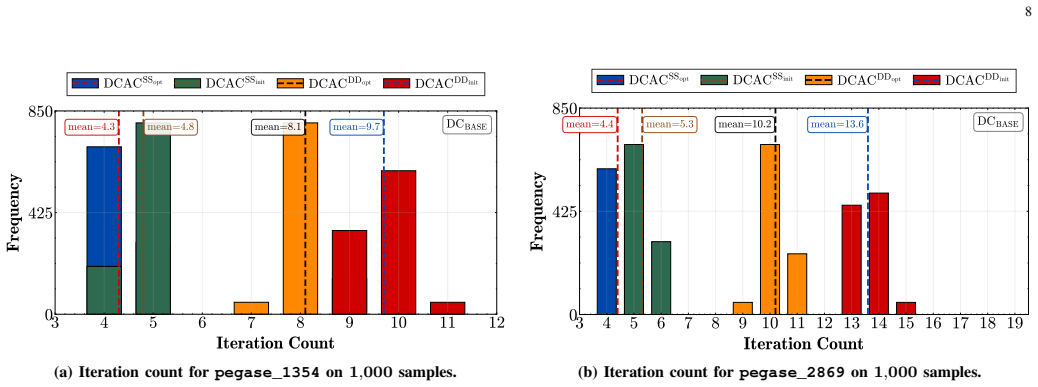
Training the parameters of a differentiable AC restoration offline produces a fixed mapping that recovers AC-feasible points from DCOPF dispatches with an 80 percent smaller cost difference than conventional single-slack recovery and a 75 percent reduction in solve time relative to ACOPF on the 9241-bus case.
What carries the argument
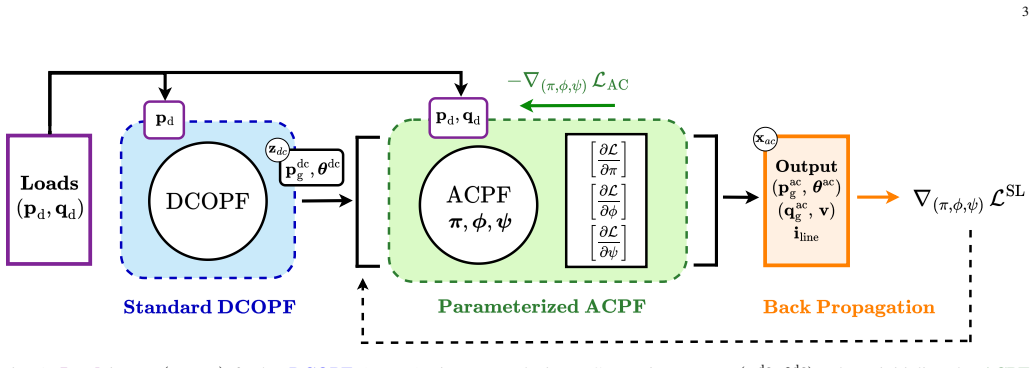
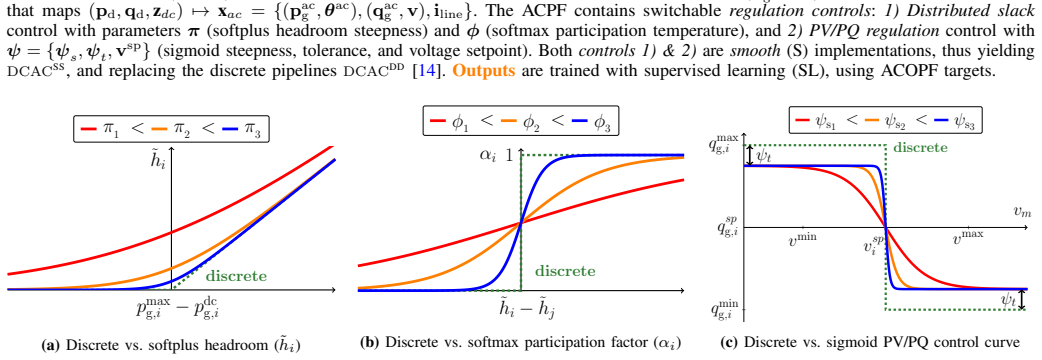
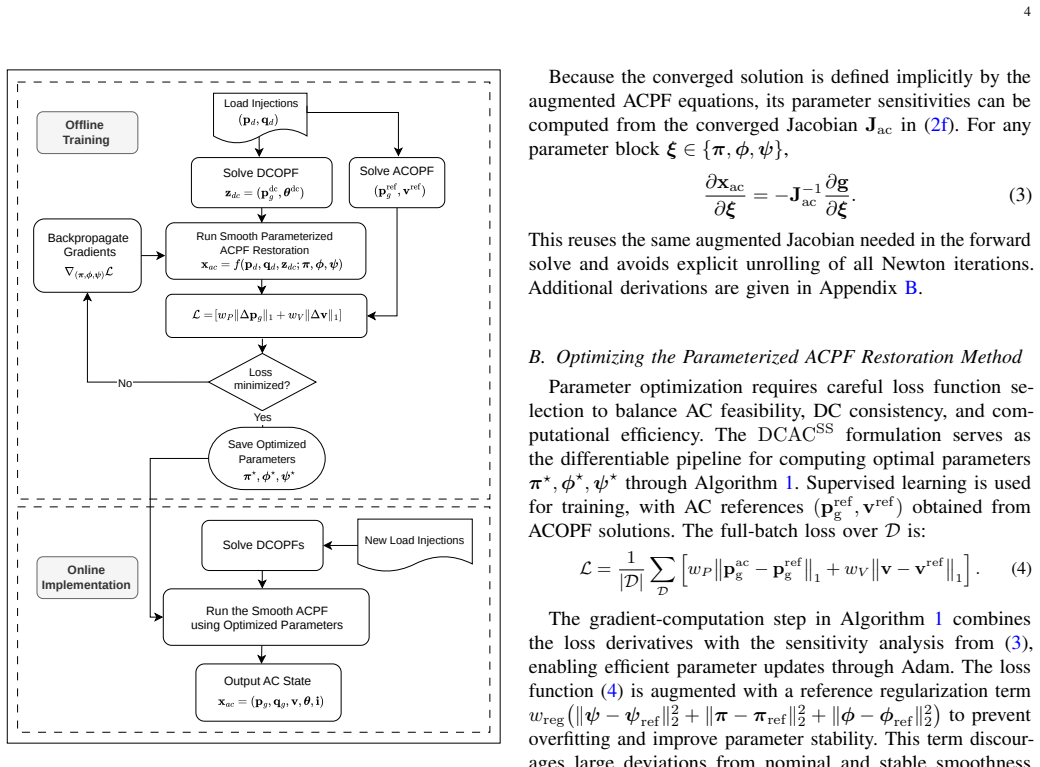
Parameterized differentiable AC power-flow restoration using smooth surrogates for distributed slack participation factors, voltage setpoints, and regulation steepness, trained via the implicit function theorem.
If this is right
- DCOPF solutions become usable in operations that require AC feasibility without solving the full nonlinear problem each time.
- The restored points achieve cost differences 80 percent smaller than single-slack recovery on the 9241-bus system.
- Solve time drops by 75 percent compared with solving ACOPF from scratch on the largest case examined.
- The same trained parameters generalize across multiple DC dispatches on IEEE, ACTIVSg, and PEGASE networks.
Where Pith is reading between the lines
- The method could be inserted as a post-processing step inside existing DCOPF-based market or reliability tools.
- If the training set is expanded to include varied loading and topology scenarios, the fixed parameters might handle a wider range of operating conditions.
- The differentiable structure opens the possibility of embedding the restoration inside larger optimization problems that require gradient information.
Load-bearing premise
Parameters trained on the chosen test systems will produce AC-feasible points for new DC dispatches without retraining or violating operational limits.
What would settle it
A dispatch computed by DCOPF on one of the test systems where the restored voltages or powers violate limits after the fixed parameters are applied.
Figures
read the original abstract
The DC optimal power flow is widely used in power system operations because of its computational efficiency and scalability. However, DC dispatches are not guaranteed to satisfy the nonlinear AC power-flow equations or associated operational limits. This paper develops a parameterized, differentiable AC power-flow restoration method for mapping DC dispatches to AC-consistent operating points. The method incorporates distributed slack for active-power balancing and PV/PQ switching for reactive-power regulation, both implemented using smooth differentiable surrogates with tunable parameters, including slack participation factors, voltage setpoints, and regulation steepness. These parameters are trained offline by differentiating through the AC restoration equations using the implicit function theorem. Once trained, the optimized parameters are fixed and used directly during AC power-flow recovery from DC dispatches. The approach is evaluated on IEEE, ACTIVSg, and PEGASE test systems using setpoints computed by standard DC optimal power flow. Results show that the optimized restoration method improves AC feasibility recovery across various systems relative to conventional single-slack AC power-flow recovery. On the 9,241-bus case, the optimized method improves cost difference by 80% relative to the conventional recovery baseline and improves solving time relative to ACOPF by 75%.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes PACR, a parameterized differentiable method to restore AC feasibility from DCOPF dispatches. It introduces smooth surrogates for distributed slack (with tunable participation factors) and PV/PQ switching (with voltage setpoints and regulation steepness), optimizes these parameters offline via the implicit function theorem applied to the AC power-flow equations, and then fixes the parameters for recovery. Evaluation on IEEE, ACTIVSg, and PEGASE systems (up to 9241 buses) reports that the optimized recovery improves AC feasibility relative to conventional single-slack recovery, with an 80% reduction in cost difference on the largest case and 75% faster solve time than full ACOPF.
Significance. If the offline-trained parameters generalize to unseen DC dispatches, the method would supply a computationally attractive route to AC-consistent points without solving a full nonlinear ACOPF at each dispatch, which is relevant for real-time and market applications that already rely on DCOPF. The use of implicit differentiation to enable parameter optimization is a clear methodological contribution that avoids the need for explicit back-propagation through a black-box solver.
major comments (2)
- [Abstract] Abstract and evaluation description: the 80% cost-difference improvement on the 9241-bus case is obtained after training the slack factors, voltage setpoints, and regulation steepness on DCOPF solutions drawn from the same IEEE/ACTIVSg/PEGASE family later used for testing. No hold-out dispatch set, no variation of load/generation patterns beyond the nominal solutions, and no out-of-sample feasibility-rate statistics are reported, so the generalization claim central to the method remains unverified.
- [Method] Method and results sections: the training procedure via the implicit function theorem is presented, yet the manuscript supplies neither the number of DC dispatches employed for parameter fitting, any training/validation split, nor quantitative measures (error bars, success rates across multiple dispatches) that would allow assessment of whether the reported gains are statistically robust or merely in-sample.
minor comments (2)
- A compact table listing the three classes of free parameters together with their symbols and physical roles would improve readability of the parameterization.
- [Abstract] The abstract states that parameters are 'trained offline' but does not indicate whether the implicit-function-theorem solve is performed once per test system or once across all systems; clarifying this point would help readers replicate the workflow.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for stronger evidence on generalization and statistical robustness. We address each major comment below and will revise the manuscript accordingly to improve clarity and completeness.
read point-by-point responses
-
Referee: [Abstract] Abstract and evaluation description: the 80% cost-difference improvement on the 9241-bus case is obtained after training the slack factors, voltage setpoints, and regulation steepness on DCOPF solutions drawn from the same IEEE/ACTIVSg/PEGASE family later used for testing. No hold-out dispatch set, no variation of load/generation patterns beyond the nominal solutions, and no out-of-sample feasibility-rate statistics are reported, so the generalization claim central to the method remains unverified.
Authors: We agree that the reported results, including the 80% improvement, are obtained on DCOPF dispatches drawn from the same standard test systems without explicit hold-out sets or load/generation variations. The method optimizes system-specific parameters for improved recovery on a given network, which aligns with practical use on fixed topologies. To address the generalization concern, we will add a revised evaluation section with hold-out dispatch sets, perturbed load patterns, and out-of-sample feasibility statistics in the updated manuscript. revision: yes
-
Referee: [Method] Method and results sections: the training procedure via the implicit function theorem is presented, yet the manuscript supplies neither the number of DC dispatches employed for parameter fitting, any training/validation split, nor quantitative measures (error bars, success rates across multiple dispatches) that would allow assessment of whether the reported gains are statistically robust or merely in-sample.
Authors: We will revise the method and results sections to explicitly state the number of DC dispatches used for parameter optimization, clarify the offline training procedure (including any implicit splits), and report quantitative robustness measures such as mean cost differences with standard deviations and feasibility success rates across the evaluated dispatches. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper defines a parameterized AC restoration procedure whose parameters are explicitly optimized offline via the implicit function theorem applied to the restoration equations themselves; the resulting fixed parameters are then applied to DCOPF setpoints drawn from the same test-system family. This constitutes standard supervised fitting followed by in-sample evaluation rather than any self-definitional loop, fitted quantity renamed as an independent prediction, or load-bearing self-citation. No equation is shown to equal its own input by construction, no uniqueness theorem is imported from prior author work, and the central derivation (smooth surrogates for slack and PV/PQ switching plus implicit differentiation) remains independent of the reported numerical improvements. The derivation chain is therefore self-contained.
Axiom & Free-Parameter Ledger
free parameters (3)
- slack participation factors
- voltage setpoints
- regulation steepness
axioms (2)
- domain assumption DC optimal power flow solutions can be mapped to points satisfying the nonlinear AC power-flow equations by adjusting a limited set of operational parameters.
- standard math The implicit function theorem applies to the AC restoration equations allowing gradient-based parameter training without explicit solver differentiation.
Reference graph
Works this paper leans on
-
[1]
DC power flow revisited,
B. Stott, J. Jardim, and O. Alsac, “DC power flow revisited,”IEEE Transactions on Power Systems, vol. 24, no. 3, pp. 1290–1300, 2009
2009
-
[2]
End-to-end feasible opti- mization proxies for large-scale economic dispatch,
W. Chen, M. Tanneau, and P. Van Hentenryck, “End-to-end feasible opti- mization proxies for large-scale economic dispatch,”IEEE Transactions on Power Systems, vol. 39, pp. 4723–4734, Mar. 2024
2024
-
[3]
Physics-informed machine learning for electricity markets: A NYISO case study,
R. Ferrando, L. Pagnier, R. Mieth, Z. Liang, Y . Dvorkin, D. Bienstock, and M. Chertkov, “Physics-informed machine learning for electricity markets: A NYISO case study,”IEEE Transactions on Energy Markets, Policy and Regulation, vol. 2, pp. 40–51, Mar. 2024
2024
-
[4]
Learning to solve optimization problems with hard linear constraints,
M. Li, S. Kolouri, and J. Mohammadi, “Learning to solve optimization problems with hard linear constraints,”IEEE Access, vol. 11, pp. 59995– 60004, 2023
2023
-
[5]
Optimally Linearizing Power Flow Equa- tions for Improved Power System Dispatch,
Y . Chen and M. K. Singh, “Optimally Linearizing Power Flow Equa- tions for Improved Power System Dispatch,” 2025. arXiv preprint arXiv:2504.03076
-
[6]
AC power flow feasibility restoration via a state estimation-based post-processing algorithm,
B. Taheri and D. K. Molzahn, “AC power flow feasibility restoration via a state estimation-based post-processing algorithm,”Electric Power Systems Research, vol. 235, Oct. 2024. Presented at the23rd Power Systems Computation Conference (PSCC)
2024
-
[7]
AC-Informed DC Optimal Transmission Switching Problems via Parameter Optimization,
B. Taheri and D. K. Molzahn, “AC-Informed DC Optimal Transmission Switching Problems via Parameter Optimization,”IEEE Transactions on Power Systems, vol. 40, pp. 5422–5433, November 2025
2025
-
[8]
AC-Network-Informed DC Optimal Power Flow for Electricity Markets,
G. E. Constante-Flores, A. H. Quisaguano, A. J. Conejo, and C. Li, “AC-Network-Informed DC Optimal Power Flow for Electricity Markets,”
- [9]
-
[10]
DC3: A learning method for optimization with hard constraints,
P. L. Donti, D. Rolnick, and J. Z. Kolter, “DC3: A learning method for optimization with hard constraints,” inInternational Conference on Learning Representations (ICLR), 2021
2021
-
[11]
DeepOPF-V: Solving AC-OPF problems efficiently,
W. Huang, X. Pan, M. Chen, and S. H. Low, “DeepOPF-V: Solving AC-OPF problems efficiently,”IEEE Transactions on Power Systems, vol. 37, no. 1, pp. 800–803, 2022. 10
2022
-
[12]
Solutions of DC OPF are never AC feasible,
K. Baker, “Solutions of DC OPF are never AC feasible,” inProceedings of the Twelfth ACM International Conference on Future Energy Systems, e-Energy ’21, (New York, NY , USA), p. 264–268, Association for Computing Machinery, 2021
2021
-
[13]
AC feasibility restoration in market clearing: Problem formulation and improvement,
X. Fang, Z. Yang, J. Yu, and Y . Wang, “AC feasibility restoration in market clearing: Problem formulation and improvement,”IEEE Trans. on Industrial Informatics, vol. 18, pp. 7597–7607, Nov. 2022
2022
-
[14]
Co-optimize dispatch and pricing in market clearing problem to balance conflicting market objectives,
Y . Wang and Z. Yang, “Co-optimize dispatch and pricing in market clearing problem to balance conflicting market objectives,”Applied Energy, vol. 403, p. 127065, 2026
2026
-
[15]
Towards AC feasibility of DCOPF dispatch,
M. A. Boateng, R. Bent, S. Misra, P. Pareek, P. Van Hentenryck, and D. Molzahn, “Towards AC feasibility of DCOPF dispatch,” to appear inElectric Power Systems Research, 2026. Presented at the24th Power Systems Computation Conference (PSCC), June 8–12, 2026
2026
-
[16]
On PV–PQ bus type switching logic in power flow computation,
J. Zhao, H. Chiang, P. Ju, and H. Li, “On PV–PQ bus type switching logic in power flow computation,” in16th Power Systems Computation Conference (PSCC), 2008
2008
-
[17]
On the accuracy of power flow and load margin calculation caused by incorrect logical PV/PQ switching: Analytics and improved methods,
L. Zeng, H.-D. Chiang, L. S. Neves, and L. F. C. Alberto, “On the accuracy of power flow and load margin calculation caused by incorrect logical PV/PQ switching: Analytics and improved methods,”International Journal of Electrical Power & Energy Systems, vol. 147, 2023
2023
-
[18]
Iterative DCOPF model using distributed slack bus,
V . N. Bharatwaj, A. R. Abhyankar, and P. R. Bijwe, “Iterative DCOPF model using distributed slack bus,” inIEEE Power and Energy Society General Meeting, 2012
2012
-
[19]
Reexamining the distributed slack bus,
S. V . Dhople, Y . C. Chen, A. Al-Digs, and A. D. Dom ´ınguez-Garc´ıa, “Reexamining the distributed slack bus,”IEEE Transactions on Power Systems, vol. 35, no. 6, pp. 4870–4879, 2020
2020
-
[20]
Evaluating feasibility within power flow,
M. Jereminov, D. M. Bromberg, A. Pandey, M. R. Wagner, and L. Pileggi, “Evaluating feasibility within power flow,”IEEE Transactions on Smart Grid, vol. 11, no. 4, pp. 3522–3534, 2020
2020
-
[21]
Two-stage homotopy method to incorporate discrete control variables into AC- OPF,
T. McNamara, A. Pandey, A. Agarwal, and L. Pileggi, “Two-stage homotopy method to incorporate discrete control variables into AC- OPF,”Electric Power Systems Research, vol. 212, p. 108283, 2022. Presented at the22nd Power Systems Computation Conference (PSCC)
2022
-
[22]
Continuously Differentiable Analytical Models for Implicit Control within Power Flow
A. Agarwal, A. Pandey, M. Jereminov, and L. Pileggi, “Continuously differentiable analytical models for implicit control within power flow,” arXiv:1811.02000, Nov. 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[23]
Learning optimal solutions for extremely fast ac optimal power flow,
A. S. Zamzam and K. Baker, “Learning optimal solutions for extremely fast ac optimal power flow,” in2020 IEEE International Conference on Communications, Control, and Computing Technologies for Smart Grids (SmartGridComm), pp. 1–6, 2020
2020
-
[24]
Bus type switching to reduce bound violations in AC power flow,
A. Van Boven and K. Baker, “Bus type switching to reduce bound violations in AC power flow,”arXiv:2511.08643, 2025
-
[25]
PowerModels.jl: An open-source framework for exploring power flow formulations,
C. Coffrin, R. Bent, K. Sundar, Y . Ng, and H. Wang, “PowerModels.jl: An open-source framework for exploring power flow formulations,” in 20th Power Systems Computation Conference (PSCC), 2018
2018
-
[26]
On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear programming,
A. W ¨achter and L. T. Biegler, “On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear programming,” Mathematical Programming, vol. 106, pp. 25–57, 2006
2006
-
[27]
pandapower—An open-source Python tool for convenient modeling, analysis, and optimization of electric power systems,
L. Thurner, A. Scheidler, F. Sch ¨afer, J.-H. Menke, J. Dollichon, F. Meier, and J. M. Myrzik, “pandapower—An open-source Python tool for convenient modeling, analysis, and optimization of electric power systems,”IEEE Transactions on Power Systems, vol. 33, p. 6510, 2018
2018
-
[28]
Differentiable optimization for deep learning-enhanced DC approximation of AC optimal power flow,
A. W. Rosemberg and M. Klamkin, “Differentiable optimization for deep learning-enhanced DC approximation of AC optimal power flow,” arXiv:2504.01970, 2025. APPENDIXA Q–V SIGMOIDCURVE ATVOLTAGESETPOINT This appendix verifies that the smooth Q–V regulation law passes through the prescribed setpoint vsp i , q sp g,i . Claim:Ifv i =v sp i , thenq ac g,i =q sp...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.