Trajectory Optimization for Collision-Aware Redundant Robotic Multi-Axis Additive Manufacturing by Constrained Gradient Projection
Pith reviewed 2026-06-30 06:27 UTC · model grok-4.3
The pith
A constrained gradient projection method optimizes long-horizon trajectories for redundant robotic multi-axis 3D printing while enforcing exact deposition positions and avoiding evolving collisions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
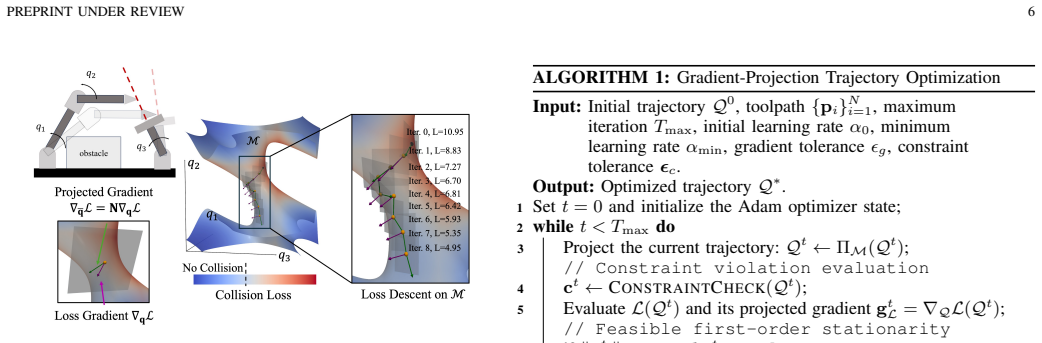
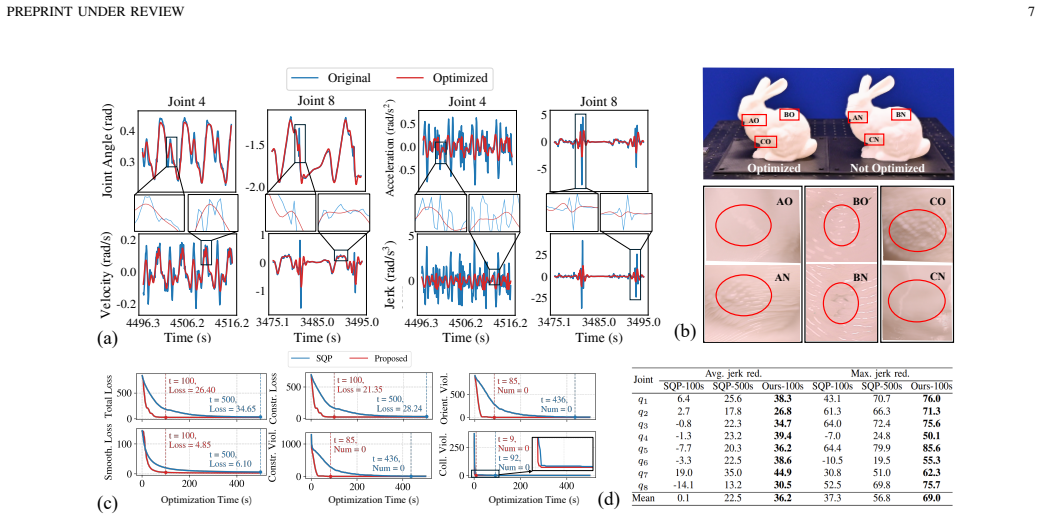
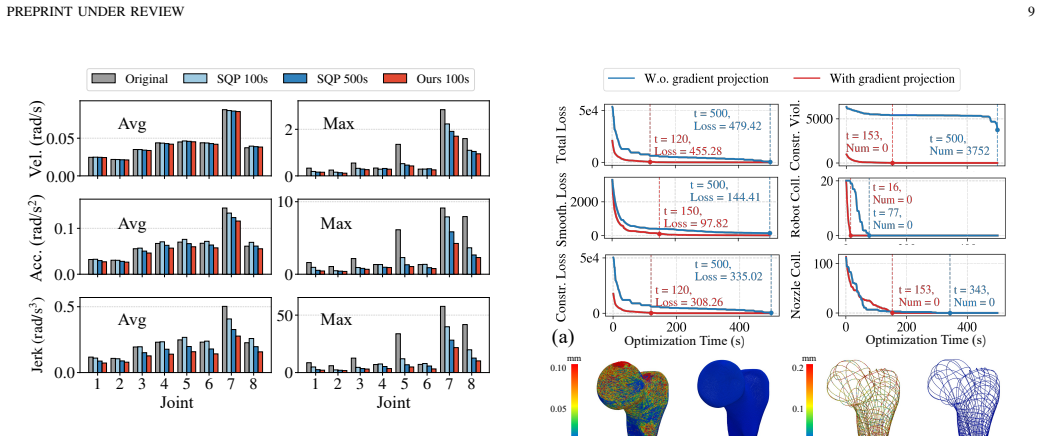
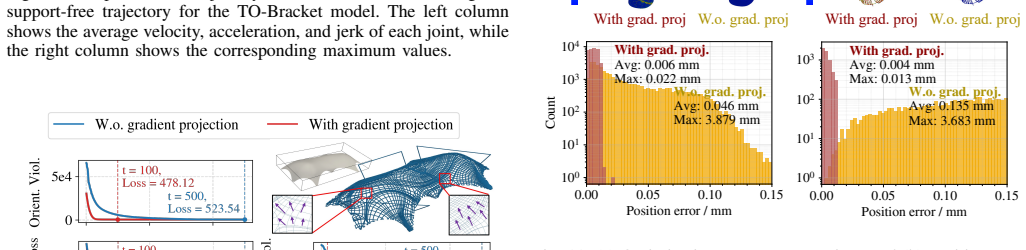
The central claim is that iterative projection of the optimization variables onto the self-motion manifold, combined with gradients restricted to its tangent space and supplied by a differentiable SDF collision model, satisfies strict waypoint position constraints exactly while handling time-varying collisions, yielding mean nozzle-position error below 10 μm, elimination of all sampled violations, up to 77.6 percent lower maximum joint jerk, and up to 10.2 times speedup versus SQP on long-horizon support-free and conformal paths.
What carries the argument
Iterative projection onto the self-motion manifold using relative-Jacobian kinematics, with loss gradients restricted to the tangent space and collision gradients from a differentiable SDF model that evolves with deposited geometry.
If this is right
- Mean nozzle-position error stays below 10 μm across diverse long-horizon support-free and conformal toolpaths.
- Maximum joint jerk is reduced by up to 77.6 percent while all sampled collision and orientation constraints remain satisfied.
- The method eliminates all sampled violations and achieves up to 10.2 times speedup with improved convergence relative to SQP.
- Resulting trajectories enable physical fabrication of complex geometries with fewer visible deposition artifacts.
Where Pith is reading between the lines
- The projection approach could be reused for other redundant-robot tasks that require exact end-effector paths amid changing obstacles.
- Replacing the SDF model with online sensor updates would allow the same constrained optimizer to handle unexpected geometry changes during printing.
- Lower jerk profiles may extend robot service life by reducing mechanical wear on repeated multi-axis fabrication jobs.
Load-bearing premise
The differentiable SDF collision model must continue to supply accurate geometry updates and reliable gradients as the printed object grows over long trajectories.
What would settle it
Execute the optimizer on a long toolpath whose deposited geometry deviates measurably from the SDF prediction and check whether any resulting physical print shows collisions, orientation violations, or mean position error above 10 μm.
Figures

read the original abstract
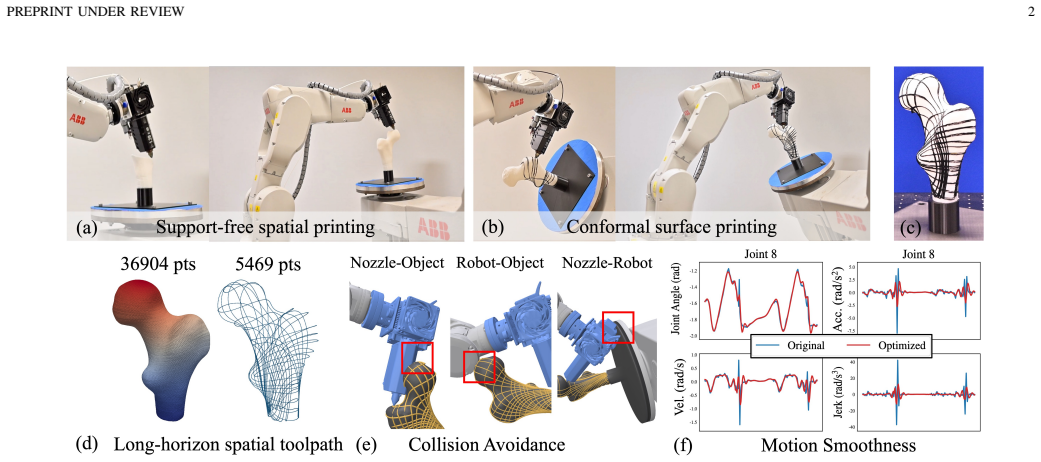
Redundant robotic multi-axis additive manufacturing (MAAM) enables support-free and conformal fabrication, but trajectory optimization for long-horizon paths remains challenging under strict deposition-position constraints and time-varying collision constraints. This work proposes a computational framework for collision-aware trajectory optimization in redundant robotic MAAM. We first formulate nozzle-workpiece relative kinematics using a relative Jacobian, and develop a differentiable SDF-based collision model that captures fabrication-induced geometry evolution and provides optimization gradients. The deposition position is then enforced as a hard waypoint-wise equality constraint through iterative projection onto the self-motion manifold, with the loss gradient restricted to the corresponding tangent space. Experiments on an 8-DOF robotic MAAM platform with diverse long-horizon support-free and conformal toolpaths show that our method maintains a mean nozzle-position error below 10{\mu}m, reduces maximum joint jerk by up to $77.6\%$, and eliminates all sampled collision and orientation violations. Compared with the SQP-based baseline, it achieves up to a 10.2x speedup and improved convergence. Physical fabrication experiments further verify that the resulting smooth, collision-free trajectories enable successful printing of complex geometries with fewer visible deposition artifacts.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a computational framework for collision-aware trajectory optimization in redundant robotic multi-axis additive manufacturing (MAAM). It formulates nozzle-workpiece relative kinematics via a relative Jacobian, develops a differentiable SDF-based collision model that captures fabrication-induced geometry evolution and supplies gradients, and enforces deposition positions as hard waypoint-wise equality constraints through iterative projection onto the self-motion manifold with loss gradients restricted to the tangent space. Experiments on an 8-DOF platform with diverse long-horizon support-free and conformal toolpaths report mean nozzle-position error below 10μm, up to 77.6% reduction in maximum joint jerk, elimination of all sampled collision and orientation violations, up to 10.2x speedup and improved convergence versus an SQP baseline, with physical prints confirming successful fabrication of complex geometries.
Significance. If the results hold, the work would be significant for robotic additive manufacturing by providing a scalable optimization approach for long-horizon collision-free trajectories under strict deposition constraints, enabling more reliable support-free and conformal printing with reduced jerk and artifacts.
major comments (1)
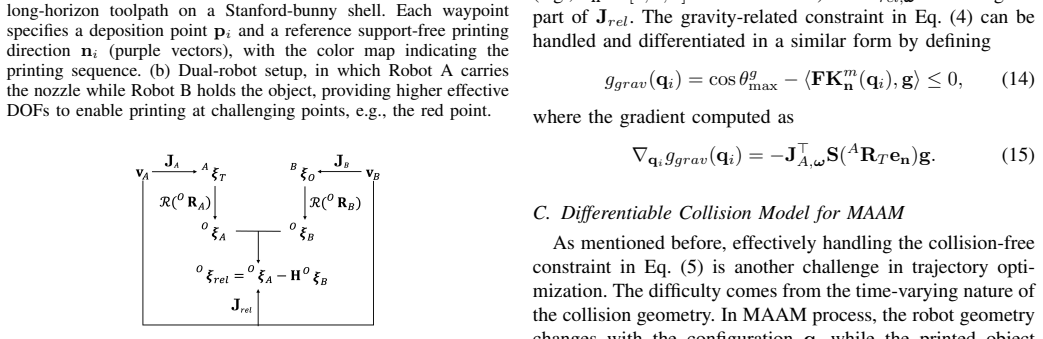
- [Abstract, paragraph on collision model development] Abstract, paragraph on collision model development: The central experimental claims (zero sampled collisions, <10μm position error, 77.6% jerk reduction) rest on the differentiable SDF model both correctly evolving the workpiece geometry during deposition and supplying reliable optimization gradients. No cross-validation against mesh-based collision detection, physical probing, or independent checks on long-horizon trajectories is reported; if the SDF approximation drifts or misses narrow passages as the part grows, the 'eliminates all sampled violations' result would be an artifact of the model rather than a property of the trajectories. This is load-bearing for the performance claims.
Simulated Author's Rebuttal
We thank the referee for the constructive comment on the validation of the differentiable SDF collision model. We address the major comment below.
read point-by-point responses
-
Referee: [Abstract, paragraph on collision model development] Abstract, paragraph on collision model development: The central experimental claims (zero sampled collisions, <10μm position error, 77.6% jerk reduction) rest on the differentiable SDF model both correctly evolving the workpiece geometry during deposition and supplying reliable optimization gradients. No cross-validation against mesh-based collision detection, physical probing, or independent checks on long-horizon trajectories is reported; if the SDF approximation drifts or misses narrow passages as the part grows, the 'eliminates all sampled violations' result would be an artifact of the model rather than a property of the trajectories. This is load-bearing for the performance claims.
Authors: We agree that explicit cross-validation of the SDF model would strengthen the manuscript. The current work does not report direct comparisons against mesh-based detectors or physical probing for the evolving geometry. The SDF is constructed to exactly represent fabrication-induced changes by unioning each deposited segment (modeled as a capsule) into the field at every timestep, with analytic gradients derived from the SDF. Physical prints provide indirect confirmation of collision-free execution. In the revision we will add a dedicated subsection that compares collision detections from the SDF model versus a standard mesh-based library (e.g., FCL) on multiple long-horizon trajectories from the experiments; we expect this to show agreement on all sampled cases and thereby confirm that the reported zero-violation results are not artifacts of the model. revision: yes
Circularity Check
No significant circularity detected in derivation chain
full rationale
The paper formulates a trajectory optimization method using relative Jacobian kinematics, a differentiable SDF-based collision model for evolving geometry, and iterative projection of deposition constraints onto the self-motion manifold with tangent-space gradient restriction. These are standard modeling and constrained optimization components applied to the MAAM domain. The reported metrics (position error, jerk reduction, collision elimination) are experimental outcomes on physical 8-DOF hardware, not quantities that reduce by the paper's own equations to fitted parameters or self-citations. No self-definitional, fitted-input-called-prediction, or load-bearing self-citation patterns appear in the provided abstract or method description. The central claims remain independent of the inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
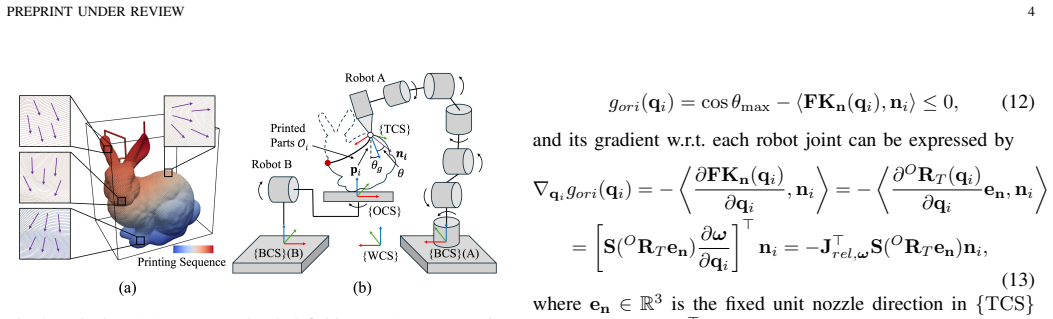
- domain assumption Nozzle-workpiece relative kinematics can be formulated using a relative Jacobian that remains valid under time-varying geometry.
- domain assumption Iterative projection onto the self-motion manifold can enforce hard waypoint-wise deposition position constraints without violating other requirements.
Reference graph
Works this paper leans on
-
[1]
Support-free volume printing by multi-axis motion,
C. Dai, C. C. Wang, C. Wu, S. Lefebvre, G. Fang, and Y .-J. Liu, “Support-free volume printing by multi-axis motion,”ACM Transactions on Graphics (TOG), vol. 37, no. 4, pp. 1–14, 2018
2018
-
[2]
Robofdm: A robotic system for support-free fabrication using fdm,
C. Wu, C. Dai, G. Fang, Y .-J. Liu, and C. C. Wang, “Robofdm: A robotic system for support-free fabrication using fdm,” in2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2017, pp. 1175–1180
2017
-
[3]
Robot- assisted multi-axis embedded silicone printing for free-form volumetric model,
H. Sun, Y . Tian, C. Xu, M. Bodaghi, F. Gao, and G. Fang, “Robot- assisted multi-axis embedded silicone printing for free-form volumetric model,”Virtual and Physical Prototyping, vol. 21, no. 1, p. e2614811, 2026
2026
-
[4]
Re- inforced fdm: Multi-axis filament alignment with controlled anisotropic strength,
G. Fang, T. Zhang, S. Zhong, X. Chen, Z. Zhong, and C. C. Wang, “Re- inforced fdm: Multi-axis filament alignment with controlled anisotropic strength,”ACM Transactions on Graphics (TOG), vol. 39, no. 6, pp. 1–15, 2020
2020
-
[5]
Exceptional mechanical performance by spatial printing with continu- ous fiber: Curved slicing, toolpath generation and physical verification,
G. Fang, T. Zhang, Y . Huang, Z. Zhang, K. Masania, and C. C. Wang, “Exceptional mechanical performance by spatial printing with continu- ous fiber: Curved slicing, toolpath generation and physical verification,” Additive Manufacturing, vol. 82, p. 104048, 2024
2024
-
[6]
Singularity-aware motion planning for multi-axis additive manufacturing,
T. Zhang, X. Chen, G. Fang, Y . Tian, and C. C. Wang, “Singularity-aware motion planning for multi-axis additive manufacturing,”IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 6172–6179, 2021
2021
-
[7]
Smooth joint motion planning for redundant fiber placement manipulator based on improved rrt,
Q. Yang, W. Qu, Y . Wang, X. Song, Y . Guo, and Y . Ke, “Smooth joint motion planning for redundant fiber placement manipulator based on improved rrt,”Robotics and Computer-Integrated Manufacturing, vol. 91, p. 102851, 2025
2025
-
[8]
Robotic wire arc additive manufacturing with variable height layers,
J. Marcotte, S. Mishra, and J. T. Wen, “Robotic wire arc additive manufacturing with variable height layers,”IEEE/ASME Transactions on Mechatronics, 2025
2025
-
[9]
Constrained motion planning for reduced jerk in robotic additive man- ufacturing systems,
S. Rescsanski, S. Ghungrad, A. Haghighi, J. Tang, and F. Imani, “Constrained motion planning for reduced jerk in robotic additive man- ufacturing systems,”Robotics and Computer-Integrated Manufacturing, vol. 101, p. 103311, 2026
2026
-
[10]
Inf-3dp: implicit neural fields for collision-free multi-axis 3d printing,
J. Qu, Z. Huang, D. Guo, H. Sun, A. Lyu, C. Dai, Y . Yam, and G. Fang, “Inf-3dp: implicit neural fields for collision-free multi-axis 3d printing,” ACM Transactions on Graphics (TOG), vol. 44, no. 6, pp. 1–18, 2025
2025
-
[11]
Robot-assisted conformal additive manufacturing for continuous fibre- reinforced grid-stiffened shell structures,
G. Zhang, Y . Wang, Z. Chen, X. Xu, K. Dong, and Y . Xiong, “Robot-assisted conformal additive manufacturing for continuous fibre- reinforced grid-stiffened shell structures,”Virtual and Physical Proto- typing, vol. 18, no. 1, p. e2203695, 2023
2023
-
[12]
Optimization of robot posture and workpiece setup in robotic milling with stiffness threshold,
Z.-Y . Liao, Q.-H. Wang, H.-L. Xie, J.-R. Li, X.-F. Zhou, and T.-H. Pan, “Optimization of robot posture and workpiece setup in robotic milling with stiffness threshold,”IEEE/ASME transactions on mechatronics, vol. 27, no. 1, pp. 582–593, 2021
2021
-
[13]
A tool posture path optimization method for robot-turntable surface milling process based on 7-dof constant tool-tip-stiffness,
H. Bai, L. Lu, B. Wang, G. Bi, L. Zhang, and L. Sun, “A tool posture path optimization method for robot-turntable surface milling process based on 7-dof constant tool-tip-stiffness,”IEEE/ASME Transactions on Mechatronics, 2026
2026
-
[14]
Planning jerk-optimized trajectory with discrete time constraints for redundant robots,
C. Dai, S. Lefebvre, K.-M. Yu, J. M. Geraedts, and C. C. Wang, “Planning jerk-optimized trajectory with discrete time constraints for redundant robots,”IEEE Transactions on Automation Science and En- gineering, vol. 17, no. 4, pp. 1711–1724, 2020
2020
-
[15]
Co-optimization of tool orientations, kinematic redundancy, and waypoint timing for robot-assisted manufacturing,
Y . Chen, T. Zhang, Y . Huang, T. Liu, and C. C. Wang, “Co-optimization of tool orientations, kinematic redundancy, and waypoint timing for robot-assisted manufacturing,”IEEE Transactions on Automation Sci- ence and Engineering, 2025. PREPRINT UNDER REVIEW 11
2025
-
[16]
Collision-free and smooth joint mo- tion planning for six-axis industrial robots by redundancy optimization,
Y .-A. Lu, K. Tang, and C.-Y . Wang, “Collision-free and smooth joint mo- tion planning for six-axis industrial robots by redundancy optimization,” Robotics and Computer-Integrated Manufacturing, vol. 68, p. 102091, 2021
2021
-
[17]
Optimization-based path planning framework for industrial manufacturing processes with complex continuous paths,
T. Weingartshofer, B. Bischof, M. Meiringer, C. Hartl-Nesic, and A. Kugi, “Optimization-based path planning framework for industrial manufacturing processes with complex continuous paths,”Robotics and Computer-Integrated Manufacturing, vol. 82, p. 102516, 2023
2023
-
[18]
Path-constrained and collision-free optimal trajectory planning for robot manipulators,
Y . Wen and P. Pagilla, “Path-constrained and collision-free optimal trajectory planning for robot manipulators,”IEEE Transactions on Automation Science and Engineering, vol. 20, no. 2, pp. 763–774, 2022
2022
-
[19]
Motion planning with sequential convex optimization and convex collision checking,
J. Schulman, Y . Duan, J. Ho, A. Lee, I. Awwal, H. Bradlow, J. Pan, S. Patil, K. Goldberg, and P. Abbeel, “Motion planning with sequential convex optimization and convex collision checking,”The International Journal of Robotics Research, vol. 33, no. 9, pp. 1251–1270, 2014
2014
-
[20]
Stomp: Stochastic trajectory optimization for motion planning,
M. Kalakrishnan, S. Chitta, E. Theodorou, P. Pastor, and S. Schaal, “Stomp: Stochastic trajectory optimization for motion planning,” in2011 IEEE International Conference on Robotics and Automation. IEEE, 2011, pp. 4569–4574
2011
-
[21]
Chomp: Gradient optimization techniques for efficient motion planning,
N. Ratliff, M. Zucker, J. A. Bagnell, and S. Srinivasa, “Chomp: Gradient optimization techniques for efficient motion planning,” in2009 IEEE international conference on robotics and automation. IEEE, 2009, pp. 489–494
2009
-
[22]
Torm: Fast and accurate trajectory optimization of redundant manipulator given an end-effector path,
M. Kang, H. Shin, D. Kim, and S.-E. Yoon, “Torm: Fast and accurate trajectory optimization of redundant manipulator given an end-effector path,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 9417–9424
2020
-
[23]
A fast coordinated motion planning method for dual-arm robot based on parallel constrained ddp,
Y . Wang, H. Li, Y . Zhao, X. Chen, X. Huang, and Z. Jiang, “A fast coordinated motion planning method for dual-arm robot based on parallel constrained ddp,”IEEE/ASME Transactions on Mechatronics, vol. 29, no. 3, pp. 2350–2361, 2023
2023
-
[24]
Gradient direction consistency-based redundancy optimization for smooth joint paths generation of industrial robots,
M. Chen, Y . Sun, S. Jiang, J. Xu, C. Lu, Q. Guo, and J. Liu, “Gradient direction consistency-based redundancy optimization for smooth joint paths generation of industrial robots,”IEEE/ASME Transactions on Mechatronics, 2026
2026
-
[25]
Optimal robot motion planning of redundant robots in machining and additive manufacturing applications,
M. Beschi, S. Mutti, G. Nicola, M. Faroni, P. Magnoni, E. Villagrossi, and N. Pedrocchi, “Optimal robot motion planning of redundant robots in machining and additive manufacturing applications,”Electronics, vol. 8, no. 12, p. 1437, 2019
2019
-
[26]
On the inverse kinematics of redundant manipulators: Characterization of the self-motion manifolds,
J. W. Burdick, “On the inverse kinematics of redundant manipulators: Characterization of the self-motion manifolds,” inAdvanced Robotics: 1989: Proceedings of the 4th International Conference on Advanced Robotics Columbus, Ohio, June 13–15, 1989. Springer, 1989, pp. 25– 34
1989
-
[27]
R. Bonalli, A. Bylard, A. Cauligi, T. Lew, and M. Pavone, “Tra- jectory optimization on manifolds: A theoretically-guaranteed em- bedded sequential convex programming approach,”arXiv preprint arXiv:1905.07654, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1905
-
[28]
J. T. Betts,Practical Methods for Optimal Control and Estimation Using Nonlinear Programming. SIAM, 2010
2010
-
[29]
Topology-aware stress analysis in shell structures,
J. Wang, Y . Liu, J. Wu, and R. Westermann, “Topology-aware stress analysis in shell structures,”Computer Methods in Applied Mechanics and Engineering, vol. 452, p. 118770, 2026
2026
-
[30]
Nocedal and S
J. Nocedal and S. J. Wright,Numerical Optimization, 2nd ed. Springer, 2006
2006
-
[31]
Toolpath generation for robotic flank milling via smoothness and stiffness optimization,
Y . Chen, Y . Lu, and Y . Ding, “Toolpath generation for robotic flank milling via smoothness and stiffness optimization,”Robotics and Computer-Integrated Manufacturing, vol. 85, p. 102640, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.