Implementation Filters and Delay-Budget Instability in Coupled Replicator--Mutator Dynamics
Pith reviewed 2026-07-02 16:37 UTC · model grok-4.3
The pith
Negative spectral branches in strictly antagonistic replicator-mutator systems split into weak, intermediate, and strong regimes under combined hard delays and implementation filters.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
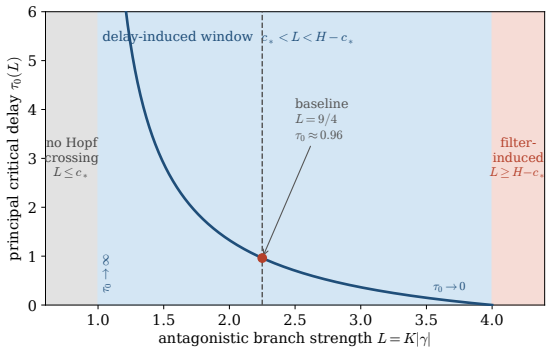
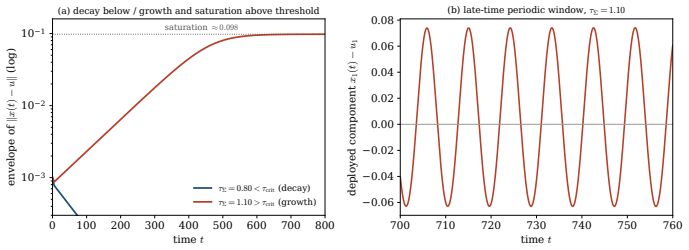
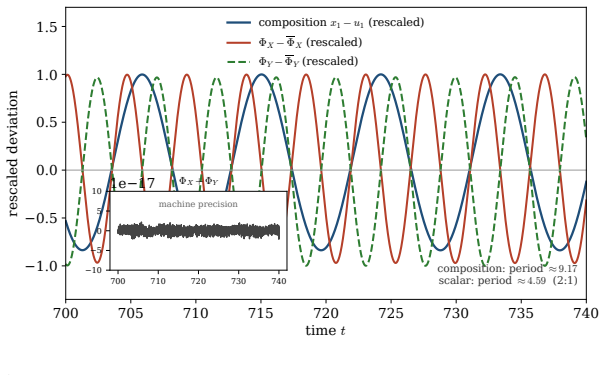
In the strictly antagonistic class, negative spectral branches split into three regimes: weak branches have no positive-frequency crossing, intermediate branches lose stability through a delay-induced Hopf bifurcation, and strong branches are at or beyond the implementation-filter instability margin already at zero hard delay. This gives an operational delay-budget rule: in the delay-induced window, reducing any hard lag has the same first-order stabilizing leverage at onset; in the filter-induced regime, hard-lag reduction alone cannot restore stability. Balanced scalar performance observables generically show a mean shift and a second harmonic at twice the compositional frequency, and unde
What carries the argument
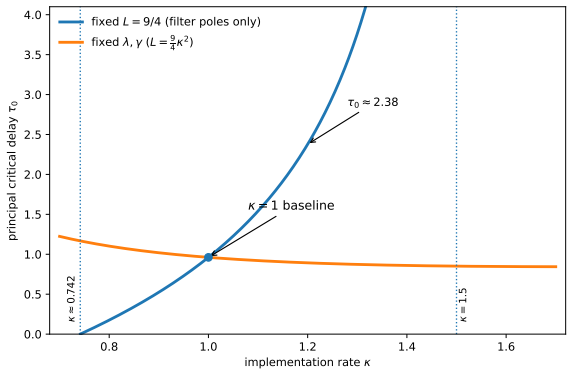
the characteristic factor in the linearized scalar branches in which hard observation and deployment lags enter only through their total sum, whereas implementation rates enter through real filter factors that cannot be absorbed into selection or exploration
If this is right
- In the delay-induced window, reducing any hard lag has the same first-order stabilizing leverage at onset.
- In the filter-induced regime, hard-lag reduction alone cannot restore stability.
- Balanced scalar performance observables generically show a mean shift and a second harmonic at twice the compositional frequency.
- Under strict antagonism the two performance signals are locked in antiphase with fixed amplitude ratio.
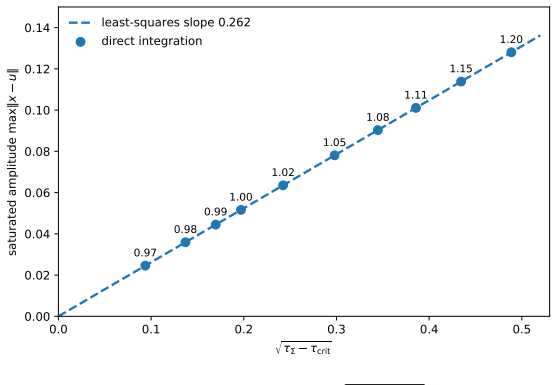
- For a baseline branch, a finite-dimensional Hopf normal-form calculation gives a negative cubic coefficient whose predictions are reproduced in direct simulations.
Where Pith is reading between the lines
- The lag-sum versus filter-factor separation may allow analogous budget rules when the model is extended to more than two populations.
- In cybersecurity or technological-countermeasure settings the regime classification implies that observation-time reductions are effective only inside the delay-induced window.
- The antiphase locking and fixed amplitude ratio of performance signals could be checked in agent-based or experimental realizations of the same contest structure.
Load-bearing premise
The model assumes barycentric balance and uniform exploration so that hard observation and deployment lags enter the linearized scalar branches only as their total sum.
What would settle it
Numerical continuation or direct eigenvalue computation for an intermediate-strength branch at positive hard delay that shows no imaginary-axis crossing, or for a strong branch at zero hard delay that remains stable, would falsify the three-regime split.
Figures
read the original abstract
We model an adaptive contest in which two antagonistically coupled populations continually reallocate effort among competing methods, but decisions are not fielded instantly. Each side has an intended portfolio and a deployed portfolio: intended reallocations follow delayed observations of the opponent, while deployment follows intent through a first-order implementation filter. Under barycentric balance and uniform exploration, the linearized scalar branches have a characteristic factor in which hard observation and deployment lags enter only through their total sum, whereas implementation rates enter through real filter factors that cannot be absorbed into selection or exploration. In the strictly antagonistic class, negative spectral branches split into three regimes: weak branches have no positive-frequency crossing, intermediate branches lose stability through a delay-induced Hopf bifurcation, and strong branches are at or beyond the implementation-filter instability margin already at zero hard delay. This gives an operational delay-budget rule: in the delay-induced window, reducing any hard lag has the same first-order stabilizing leverage at onset; in the filter-induced regime, hard-lag reduction alone cannot restore stability. Balanced scalar performance observables generically show a mean shift and a second harmonic at twice the compositional frequency, and under strict antagonism the two performance signals are locked in antiphase with fixed amplitude ratio. For a baseline branch, a finite-dimensional Hopf normal-form calculation gives a negative cubic coefficient, and direct simulations reproduce the predicted threshold, amplitude scaling, and observable signatures. Motivating applications include cybersecurity and rapid technological countermeasure adaptation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper models two antagonistically coupled populations reallocating effort among methods with delayed observations and first-order implementation filters. Under barycentric balance and uniform exploration, the linearized scalar branches admit a characteristic factor in which hard observation and deployment lags appear only as their sum while implementation rates enter via non-absorbable real filter factors. In the strictly antagonistic class this produces three regimes for negative spectral branches (weak: no positive-frequency crossing; intermediate: delay-induced Hopf; strong: already unstable at zero hard delay via the filter margin), yielding an operational delay-budget rule. Balanced performance observables exhibit a mean shift and second harmonic; under strict antagonism the signals are antiphase-locked with fixed amplitude ratio. A finite-dimensional Hopf normal form for a baseline branch has negative cubic coefficient, and direct simulations reproduce the predicted threshold, amplitude scaling, and observable signatures.
Significance. If the factorization and regime classification hold, the work supplies a concrete, testable delay-budget rule separating hard-lag and filter effects in evolutionary game dynamics with implementation inertia. The explicit separation of delay types, the normal-form sign, and the matching simulations constitute reproducible, falsifiable content that strengthens the contribution to delay-induced instabilities in replicator-mutator systems. Applications to cybersecurity countermeasure adaptation are plausible.
major comments (3)
- [linearization / characteristic factor derivation] The central delay-budget rule rests on the claim that, under barycentric balance and uniform exploration, hard lags enter the characteristic factor only through their sum while implementation rates appear via real filter factors that cannot be absorbed. The manuscript must exhibit the explicit form of this factor (presumably derived in the linearization section) so that the subsequent splitting of negative branches into weak/intermediate/strong regimes can be verified directly from the roots.
- [regime analysis] The three-regime classification for negative spectral branches (no crossing; delay-induced Hopf; filter instability at zero delay) is load-bearing for the operational rule. The paper should state the precise conditions on the filter parameters and the sign of the real part that demarcate the regimes, together with the location of the Hopf crossing frequency, so that the rule is not merely descriptive.
- [Hopf normal form] The Hopf normal-form calculation yielding a negative cubic coefficient is invoked to classify the bifurcation as supercritical. The manuscript should display the explicit normal-form coefficients (or at least the sign-determining combination) for the baseline branch so that the claim can be checked without re-deriving the center manifold.
minor comments (2)
- [simulations] The abstract states that simulations reproduce the predicted threshold, amplitude scaling, and observable signatures, but the main text should report the precise parameter values, integration method, and quantitative error measures used in those comparisons.
- [model equations] Notation for the implementation-filter time constants versus the hard lags should be made uniform across the linearization and the regime diagrams to avoid ambiguity when the total hard delay is varied.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review. The positive assessment of the contribution is appreciated. We address each major comment below and will incorporate the requested explicit material in the revised manuscript.
read point-by-point responses
-
Referee: [linearization / characteristic factor derivation] The central delay-budget rule rests on the claim that, under barycentric balance and uniform exploration, hard lags enter the characteristic factor only through their sum while implementation rates appear via real filter factors that cannot be absorbed. The manuscript must exhibit the explicit form of this factor (presumably derived in the linearization section) so that the subsequent splitting of negative branches into weak/intermediate/strong regimes can be verified directly from the roots.
Authors: We agree that the explicit characteristic factor must be displayed for verification. The linearization section derives the factor under barycentric balance and uniform exploration; the revised manuscript will include the full expanded form of the characteristic equation, with the summation of hard lags and the separate real filter factors shown explicitly. revision: yes
-
Referee: [regime analysis] The three-regime classification for negative spectral branches (no crossing; delay-induced Hopf; filter instability at zero delay) is load-bearing for the operational rule. The paper should state the precise conditions on the filter parameters and the sign of the real part that demarcate the regimes, together with the location of the Hopf crossing frequency, so that the rule is not merely descriptive.
Authors: We will add the precise demarcation conditions in the revised text. These will consist of the inequalities on the filter rate relative to selection and exploration strengths that separate the weak, intermediate, and strong regimes, the sign condition on the real part at zero hard delay, and the closed-form expression for the Hopf crossing frequency. revision: yes
-
Referee: [Hopf normal form] The Hopf normal-form calculation yielding a negative cubic coefficient is invoked to classify the bifurcation as supercritical. The manuscript should display the explicit normal-form coefficients (or at least the sign-determining combination) for the baseline branch so that the claim can be checked without re-deriving the center manifold.
Authors: We will include the explicit normal-form coefficients for the baseline branch in the revision. At minimum the combination of coefficients that fixes the sign of the cubic term will be stated, allowing direct verification of the supercritical character without repeating the center-manifold reduction. revision: yes
Circularity Check
No circularity; derivation proceeds from linearization of stated model equations
full rationale
The paper states its central factorization and regime classification as direct consequences of linearizing the replicator-mutator system under the explicit modeling assumptions of barycentric balance and uniform exploration. The characteristic factor is presented as a mathematical property of those equations, not as a fitted quantity or self-referential definition. No self-citations are invoked as load-bearing uniqueness theorems, no parameters are fitted to data and then relabeled as predictions, and no ansatz is smuggled via prior work. The Hopf normal-form calculation and simulation checks are likewise independent of the target result. This is the standard case of a self-contained mathematical derivation.
Axiom & Free-Parameter Ledger
free parameters (1)
- exploration rate
axioms (2)
- domain assumption barycentric balance and uniform exploration
- domain assumption first-order implementation filter
Reference graph
Works this paper leans on
-
[1]
A new evolutionary law,
L. Van Valen, “A new evolutionary law,”Evolutionary Theory, vol. 1, pp. 1–30, 1973
1973
-
[2]
Arms races between and within species,
R. Dawkins and J. R. Krebs, “Arms races between and within species,” Proceedings of the Royal Society of London B,vol.205, no.1161, pp.489– 511, 1979
1979
-
[3]
Evolutionary stable strategies and game dynamics,
P. D. Taylor and L. B. Jonker, “Evolutionary stable strategies and game dynamics,”Mathematical Biosciences, vol. 40, no. 1–2, pp. 145–156, 1978
1978
-
[4]
Hofbauer and K
J. Hofbauer and K. Sigmund,Evolutionary Games and Population Dy- namics. Cambridge, U.K.: Cambridge Univ. Press, 1998
1998
-
[5]
Evolutionary dynamics for bimatrix games: A Hamil- tonian system?
J. Hofbauer, “Evolutionary dynamics for bimatrix games: A Hamil- tonian system?”Journal of Mathematical Biology, vol. 34, no. 5–6, pp. 675–688, 1996
1996
-
[6]
Unifying evolutionary dynamics,
K. M. Page and M. A. Nowak, “Unifying evolutionary dynamics,”Jour- nal of Theoretical Biology, vol. 219, no. 1, pp. 93–98, 2002
2002
-
[7]
Effect of time delay and evolutionarily stable strategy,
Y. Tao and Z. Wang, “Effect of time delay and evolutionarily stable strategy,”Journal of Theoretical Biology, vol. 187, no. 1, pp. 111–116, 1997
1997
-
[8]
Stability of evolutionarily stable strategies in discrete replicator dynamics with time delay,
J. Alboszta and J. Miękisz, “Stability of evolutionarily stable strategies in discrete replicator dynamics with time delay,”Journal of Theoretical Biology, vol. 231, no. 2, pp. 175–179, 2004
2004
-
[9]
Hopf Bifurcations in Replicator Dynamics with Distributed Delays
N. Ben-Khalifa, R. El-Azouzi, and Y. Hayel, “Hopf bifurcations in repli- cator dynamics with distributed delays,” arXiv:1703.06721, 2017. 56
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[10]
Replicator dynamics of evolutionary games with dif- ferent delays on costs and benefits,
T. A. Wettergren, “Replicator dynamics of evolutionary games with dif- ferent delays on costs and benefits,”Applied Mathematics and Compu- tation, vol. 458, art. 128228, 2023. doi:10.1016/j.amc.2023.128228
-
[11]
Evolutionary dy- namics of the delayed replicator-mutator equation: Limit cycle and co- operation,
S. Mittal, A. Mukhopadhyay, and S. Chakraborty, “Evolutionary dy- namics of the delayed replicator-mutator equation: Limit cycle and co- operation,”Physical Review E, vol. 101, no. 4, art. 042410, 2020
2020
-
[12]
The stability of two- community replicator dynamics with discrete multi-delays,
J. Pi, H. Yang, Y. Shu, C. Zhong, and G. Yang, “The stability of two- community replicator dynamics with discrete multi-delays,”Mathemat- ics, vol. 8, no. 12, art. 2120, 2020. doi:10.3390/math8122120
-
[13]
J. Mohamadichamgavi and M. Bodnar, “Bifurcation analysis of repli- cator dynamics with logistic growth and strategy-dependent time de- lays in the snowdrift game,”Dynamic Games and Applications, 2025. doi:10.1007/s13235-025-00671-1
-
[14]
Hopf bifurcations in two-strategy delayed replicator dynamics,
E. Wesson, R. Rand, and D. G. Rand, “Hopf bifurcations in two-strategy delayed replicator dynamics,”International Journal of Bifurcation and Chaos, vol. 26, no. 1, art. 1650006, 2016. doi:10.1142/S0218127416500061
-
[15]
Compart- ment model of strategy-dependent time delays in replicator dynam- ics,
M. Fic, F. Bastian, J. Miękisz, and C. S. Gokhale, “Compart- ment model of strategy-dependent time delays in replicator dynam- ics,”Journal of Theoretical Biology, vol. 601, art. 112044, 2025. doi:10.1016/j.jtbi.2025.112044
-
[16]
Intrinsic noise in structured replicator dynamics modeling time delays,
J. Miękisz and J. Mohamadichamgavi, “Intrinsic noise in structured replicator dynamics modeling time delays,”Dynamic Games and Ap- plications, vol. 15, no. 4, pp. 1364–1377, 2025. doi:10.1007/s13235-025- 00640-8
-
[17]
MacDonald,Time Lags in Biological Models
N. MacDonald,Time Lags in Biological Models. Lecture Notes in Biomathematics, vol. 27. Berlin, Germany: Springer, 1978
1978
-
[18]
Smith,An Introduction to Delay Differential Equations with Applica- tions to the Life Sciences
H. Smith,An Introduction to Delay Differential Equations with Applica- tions to the Life Sciences. Texts in Applied Mathematics, vol. 57. New York, NY, USA: Springer, 2011. 57
2011
-
[19]
Phenotype adjustment promotes adaptive evolution in a game without conflict,
S. Yamaguchi and Y. Iwasa, “Phenotype adjustment promotes adaptive evolution in a game without conflict,”Theoretical Population Biology, vol. 102, pp. 16–25, 2015. doi:10.1016/j.tpb.2015.03.004
-
[20]
J. L. Pressman and A. Wildavsky,Implementation, 3rd ed. Berkeley, CA, USA: Univ. of California Press, 1984
1984
-
[21]
The implementation of public policy: a framework of analysis,
P. Sabatier and D. Mazmanian, “The implementation of public policy: a framework of analysis,”Policy Studies Journal, vol. 8, no. 4, pp. 538– 560, 1980
1980
-
[22]
S. M. Barrett, “Implementation studies: time for a revival? Personal re- flections on 20 years of implementation studies,”Public Administration, vol. 82, no. 2, pp. 249–262, 2004. doi:10.1111/j.0033-3298.2004.00393.x
-
[23]
B. D. Hassard, N. D. Kazarinoff, and Y.-H. Wan,Theory and Appli- cations of Hopf Bifurcation. Cambridge, U.K.: Cambridge Univ. Press, 1981
1981
-
[24]
J. K. Hale and S. M. Verduyn Lunel,Introduction to Functional Differ- ential Equations. New York, NY, USA: Springer, 1993
1993
-
[25]
Below-threshold bistability and implementation lag in a simplex model of radical vote-share dynamics,
A. Omelchenko, “Below-threshold bistability and implementation lag in a simplex model of radical vote-share dynamics,”Communications in Nonlinear Science and Numerical Simulation, vol. 162, art. 110392,
-
[26]
doi:10.1016/j.cnsns.2026.110392. 58
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.