Exploring LLM in Semantic Communication for V2X Networks
Pith reviewed 2026-07-01 00:08 UTC · model grok-4.3
The pith
A semantic communication system using large language models reduces data transmission in vehicle-to-everything networks by an average of 33.54 percent.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
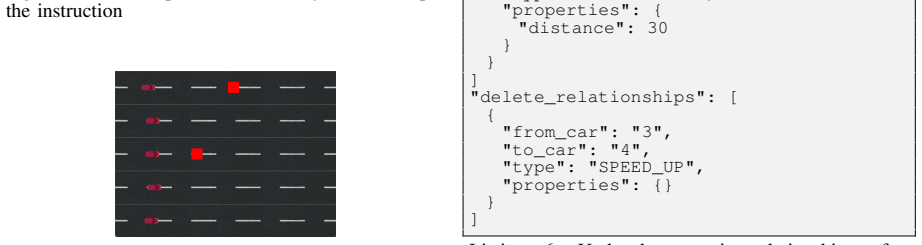
The central claim is that integrating a large language model with graph-based knowledge representation allows semantic transformation of sensor inputs into natural language messages, resulting in an average 33.54% reduction in data transmission and supporting context-aware coordination in V2X scenarios.
What carries the argument
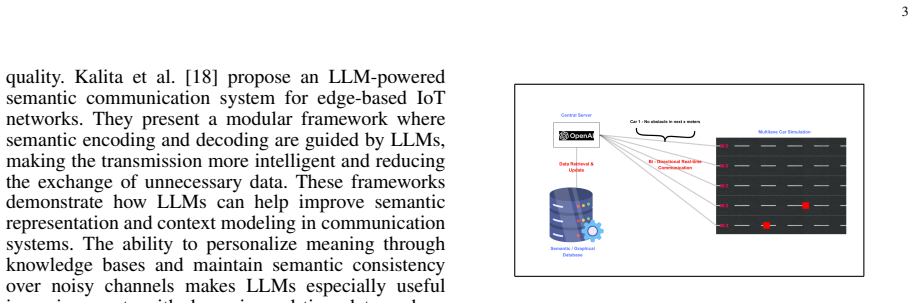
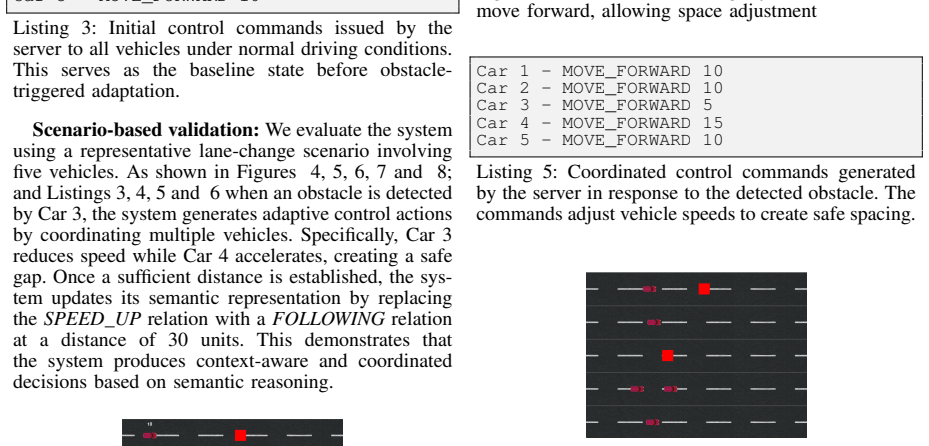
The LLM-based semantic communication framework that converts structured sensor inputs into concise natural language messages describing context and intent.
If this is right
- V2X networks transmit less data while maintaining situational awareness for coordination.
- High-level control decisions are generated from shared situational awareness.
- Bandwidth usage is reduced in multilane traffic simulations.
- Context-aware coordination is illustrated in representative scenarios.
Where Pith is reading between the lines
- This could reduce network congestion in areas with high vehicle density.
- The method might be applied to other real-time coordination systems like autonomous drone fleets.
- Standardization of the message format would be needed for broad adoption across different vehicle systems.
Load-bearing premise
The assumption that LLM-generated natural language messages preserve all information necessary for safe real-time vehicle coordination decisions without introducing errors or omissions that the simulation does not detect.
What would settle it
A test scenario in which an LLM-generated message leads to a coordination error or collision that raw sensor data transmission would have prevented.
Figures
read the original abstract
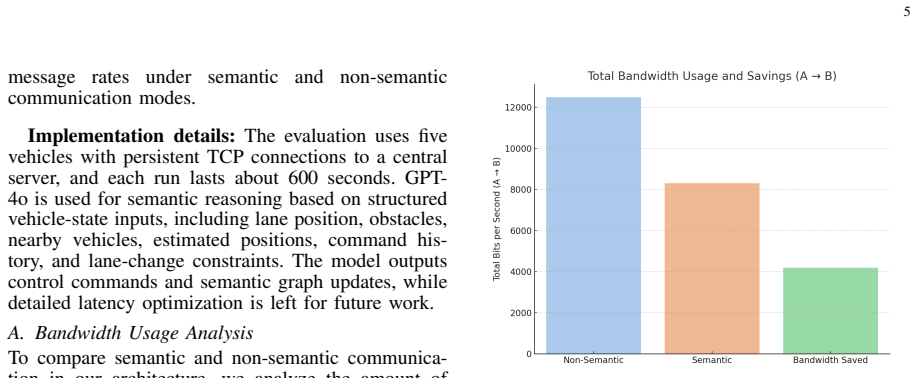
The rapid growth of connected and autonomous vehicles has created a demand for more efficient and intelligent communication systems. Traditional Vehicle-to-Everything (V2X) networks rely on transmitting raw sensor data, leading to high bandwidth usage and redundant information exchange. To address this, we propose a semantic communication framework that integrates a Large Language Model (LLM) with graph-based knowledge representation, to transmit only high-level, meaningful messages instead of raw data. Within this framework, the LLM performs semantic transformation, converting structured sensor inputs into concise natural language messages that describe context and intent. It also generates high-level control decisions based on shared situational awareness across the V2X network. A multilane traffic simulation was developed to compare semantic and non-semantic modes in terms of bandwidth usage. Results show an average 33.54% reduction in data transmission and illustrate context-aware coordination in representative scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an LLM-integrated graph-based semantic communication framework for V2X networks in which the LLM converts structured sensor inputs into concise natural-language messages describing context and intent and also generates high-level control decisions. A multilane traffic simulation is used to compare semantic and non-semantic modes, with the central empirical claim being an average 33.54% reduction in data transmission together with illustrations of context-aware coordination.
Significance. If the bandwidth-reduction claim can be supported by reproducible simulation details, fidelity metrics, and safety validation, the work would address a timely problem in vehicular networks by showing how LLMs might enable semantic rather than raw-data exchange. The combination of graph knowledge representation with LLM semantic transformation is a plausible direction, but the absence of any quantitative validation of information preservation or coordination correctness currently prevents assessment of practical impact.
major comments (3)
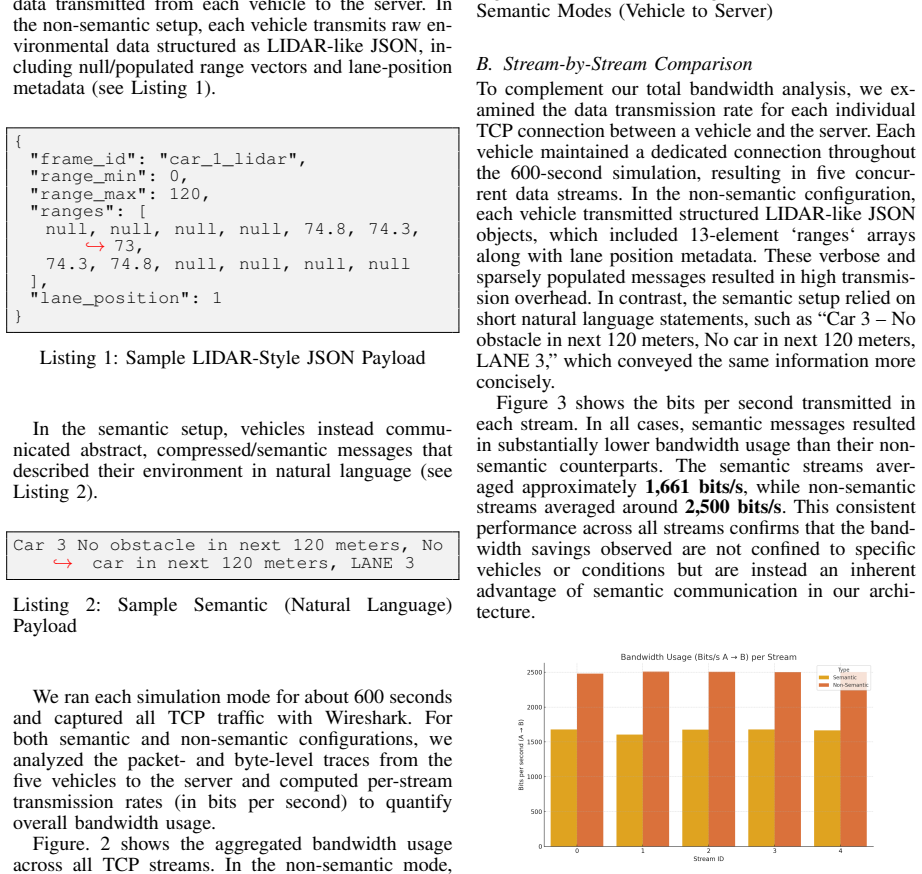
- [Abstract] Abstract: the reported 33.54% reduction is given as a single point estimate from an unspecified simulation with no error bars, no description of how message size is quantified for the semantic case, no baseline details, and no message-fidelity or safety metrics; this single number is the sole quantitative support for the central claim.
- [Abstract] Abstract / simulation description: no ground-truth comparison is provided that measures information loss on coordination-critical variables (exact positions, velocities, intent) or that reports collision / safety metrics to confirm that LLM-generated messages do not omit or distort facts required for safe real-time decisions.
- [Framework description] Framework description: the construction of the graph-based knowledge representation, its integration with the LLM, and the precise semantic-transformation procedure are not specified, leaving the mechanism that supposedly enables the bandwidth saving unreproducible and untestable.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments, which highlight important aspects of reproducibility and validation. We address each major comment point-by-point below, indicating planned revisions to the manuscript where feasible.
read point-by-point responses
-
Referee: [Abstract] Abstract: the reported 33.54% reduction is given as a single point estimate from an unspecified simulation with no error bars, no description of how message size is quantified for the semantic case, no baseline details, and no message-fidelity or safety metrics; this single number is the sole quantitative support for the central claim.
Authors: We agree that the abstract presents the 33.54% figure without sufficient supporting context. In the revised manuscript we will expand the abstract to briefly describe the multilane traffic simulation setup, clarify that message size for the semantic case is quantified via token count of the LLM-generated natural-language descriptions (versus raw sensor data volume for the baseline), note the non-semantic baseline, and reference variability measures from the results section. The reported value is an average across simulation runs. revision: yes
-
Referee: [Abstract] Abstract / simulation description: no ground-truth comparison is provided that measures information loss on coordination-critical variables (exact positions, velocities, intent) or that reports collision / safety metrics to confirm that LLM-generated messages do not omit or distort facts required for safe real-time decisions.
Authors: The simulation was designed to demonstrate bandwidth savings and context-aware coordination through representative scenarios rather than exhaustive fidelity or safety benchmarking. We will revise the manuscript to explicitly discuss this scope limitation, add qualitative analysis of whether critical variables appear preserved in the illustrated cases, and include a dedicated future-work subsection outlining the need for ground-truth information-loss metrics and collision-rate evaluations. revision: partial
-
Referee: [Framework description] Framework description: the construction of the graph-based knowledge representation, its integration with the LLM, and the precise semantic-transformation procedure are not specified, leaving the mechanism that supposedly enables the bandwidth saving unreproducible and untestable.
Authors: We will substantially expand the framework section in the revision to include: (i) the exact procedure for constructing the graph from structured sensor inputs (node/edge definitions and attribute encoding), (ii) the prompt templates and integration points used with the LLM for semantic transformation, and (iii) pseudocode or a step-by-step algorithmic description of the end-to-end semantic pipeline. This will directly address reproducibility. revision: yes
- Quantitative ground-truth measurements of information loss on coordination-critical variables and explicit safety metrics (e.g., collision rates) were not computed in the original simulation and cannot be supplied without conducting new experiments.
Circularity Check
No circularity: empirical simulation output with no derivation or self-citation reduction
full rationale
The paper reports an empirical result from a multilane traffic simulation comparing semantic (LLM-based) and non-semantic V2X modes, yielding a 33.54% average reduction in data transmission. No equations, fitted parameters, uniqueness theorems, or self-citations are invoked to derive this figure; it is presented as a direct simulation output. The framework description (LLM semantic transformation plus graph knowledge) is a proposed architecture whose performance is measured externally rather than defined into the result by construction. This is a standard non-circular empirical claim.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption LLM-generated natural-language messages retain all information required for correct real-time control decisions in V2X scenarios
invented entities (1)
-
LLM-plus-graph semantic communication framework for V2X
no independent evidence
Reference graph
Works this paper leans on
-
[1]
X. Luoet al., ”Semantic Communications: Overview, Open Issues, and Future Research Directions,” in IEEE Wireless Communications, vol. 29, no. 1, pp. 210-219, February 2022, doi: 10.1109/MWC.101.2100269
-
[2]
T. Shimizuet al., ”Comparative Analysis of DSRC and LTE- V2X PC5 Mode 4 with SAE Congestion Control,” 2020 IEEE Vehicular Networking Conference (VNC), New York, NY , USA, 2020, pp. 1-8, doi: 10.1109/VNC51378.2020.9318353
-
[3]
6G for vehicle-to-everything (V2X) communications: Enabling technologies, challenges, and oppor- tunities,
M. N. A. Rahimet al., “6G for vehicle-to-everything (V2X) communications: Enabling technologies, challenges, and oppor- tunities,”IEEE Access, vol. 11, pp. 103538–103572, 2023
2023
-
[4]
Mode Collapse in Generative Adversarial Networks: An Overview,
H. Ouamnaet al., ”6G and V2X Communications: Applications, Features, and Challenges,” 2022 8th International Conference on Optimization and Applications (ICOA), Genoa, Italy, 2022, pp. 1-6, doi: 10.1109/ICOA55659.2022.9934407
-
[5]
A survey on semantic communications: Tech- nologies, solutions, applications and challenges,
Y . Liuet al., “A survey on semantic communications: Tech- nologies, solutions, applications and challenges,”Digital Com- munications and Networks, vol. 10, no. 3, pp. 528–545, 2024
2024
-
[6]
Semantic communication: A survey on research landscape, challenges, and future directions,
T. Getuet al., “Semantic communication: A survey on research landscape, challenges, and future directions,”TechRxiv preprint, 2023
2023
-
[7]
Semantic communication: A survey of its theoretical development,
G. Xinet al., “Semantic communication: A survey of its theoretical development,”Entropy, vol. 26, no. 2, p. 102, 2024
2024
-
[8]
A survey on semantic communication networks: Architecture, security, and privacy,
S. Guoet al., “A survey on semantic communication networks: Architecture, security, and privacy,”IEEE Communications Sur- veys & Tutorials, 2024
2024
-
[9]
Semantic vehicle-to-everything (V2X) commu- nications towards 6G,
T. Lyuet al., “Semantic vehicle-to-everything (V2X) commu- nications towards 6G,”arXiv preprint arXiv:2402.06473, 2024
-
[10]
Language models are few-shot learners,
T. B. Brownet al., “Language models are few-shot learners,” Advances in Neural Information Processing Systems, vol. 33, pp. 1877–1901, 2020
1901
-
[11]
OpenAI, “GPT-4 technical report,”arXiv preprint arXiv:2303.08774, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[12]
Large language model (LLM) for telecommunications: A comprehensive survey,
H. Zhouet al., “Large language model (LLM) for telecommunications: A comprehensive survey,”arXiv preprint arXiv:2401.00315, 2024
-
[13]
Leveraging LLMs to explain DRL de- cisions for transparent 6G network slicing,
M. Ameuret al., “Leveraging LLMs to explain DRL de- cisions for transparent 6G network slicing,”arXiv preprint arXiv:2312.08874, 2024
-
[14]
LLM-based edge intelligence: A comprehen- sive survey,
O. Frihaet al., “LLM-based edge intelligence: A comprehen- sive survey,”IEEE Communications Surveys & Tutorials, 2024
2024
-
[15]
The role of LLMs in sustainable smart cities,
A. Ullahet al., “The role of LLMs in sustainable smart cities,” IEEE Access, 2024
2024
-
[16]
6G comprehensive intelligence: Network operations and optimization based on large language models,
S. Longet al., “6G comprehensive intelligence: Network operations and optimization based on large language models,” IEEE Wireless Communications, 2024
2024
-
[17]
Large AI model empowered multimodal semantic communications,
F. Jianget al., “Large AI model empowered multimodal semantic communications,”IEEE Wireless Communications, 2024
2024
-
[18]
Large language models for semantic communi- cation in edge-based IoT networks,
A. Kalita, “Large language models for semantic communi- cation in edge-based IoT networks,”IEEE Internet of Things Magazine, vol. 7, no. 1, pp. 42–49, 2024
2024
-
[19]
Embodied AI-enhanced vehicular networks,
R. Zhanget al., “Embodied AI-enhanced vehicular networks,” arXiv preprint arXiv:2501.01141, 2025
-
[20]
Hybrid reasoning based on large language models for autonomous car driving,
M. Azarafza, C. Steinmetz, A. Rettberg, M. Nayyeri, and S. Staab, “Hybrid reasoning based on large language models for autonomous car driving,”arXiv preprint arXiv:2402.13606, 2024
-
[21]
Neo4j Graph Database,
Neo4j, “Neo4j Graph Database,” Neo4j Inc., 2024. [Online]. Available: https://neo4j.com
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.