Geometric Reconstruction of Extrinsic Contact Trajectories using Tactile Sensing and Proprioception for Tool Manipulation
Pith reviewed 2026-06-26 11:28 UTC · model grok-4.3
The pith
Grasp-level tactile sensing combined with proprioception reconstructs tool-tip contact trajectories under a single-point contact model.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
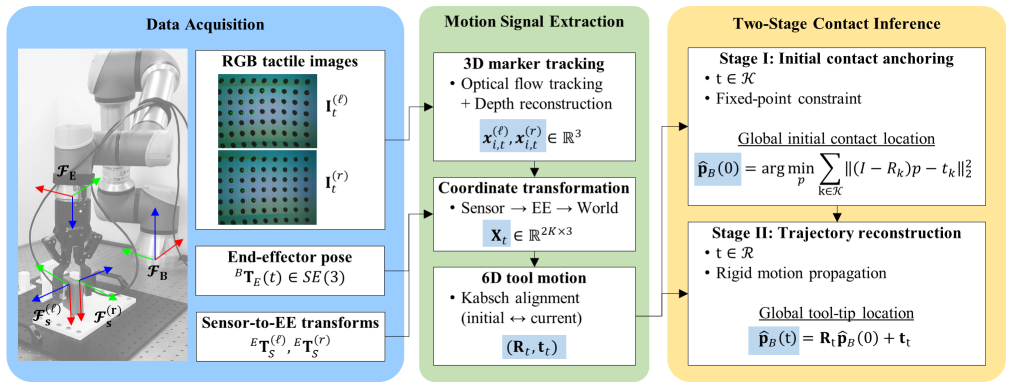
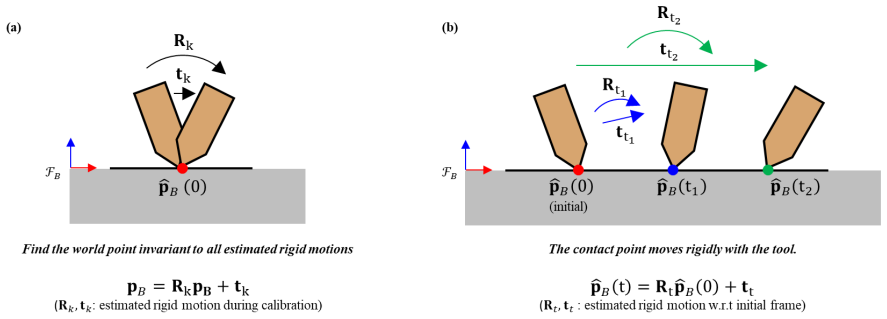
Tool-tip trajectory reconstruction is formulated as a geometric inference problem under a single-point contact assumption. The global tool-tip contact location is estimated from a calibration segment designed to approximate fixed-point behavior, after which the full trajectory is reconstructed by composing relative tool motions estimated from tactile marker observations under continuous contact.
What carries the argument
Composition of relative tool motions from tactile marker observations, initialized by global location from a calibration segment under the single-point contact assumption.
If this is right
- Extrinsic tool-tip trajectory geometry can be recovered consistently from grasp-level tactile sensing.
- Trajectory shape remains stable across variations in tools, wrist poses, and grasp configurations.
- The pipeline runs online at roughly 14 Hz while delivering millimeter-scale accuracy on both full trajectory and shape.
Where Pith is reading between the lines
- The same geometric composition could support closed-loop control of tool paths in tasks such as surface tracing without requiring sensors at the tip.
- Relaxing the single-point assumption to allow brief multi-point episodes might extend the method to more complex contacts while preserving the calibration step.
- Because shape recovery proved robust to grasp changes, the approach may transfer to compliant or re-grasping scenarios common in unstructured environments.
Load-bearing premise
Contact remains a single point at all times and a calibration segment can approximate fixed-point behavior well enough to initialize absolute location in the world frame.
What would settle it
Running the pipeline on a continuous curved-surface contact task while recording ground-truth tip position with an external optical tracker and finding average world-frame RMSE substantially larger than 8.59 mm.
Figures
read the original abstract
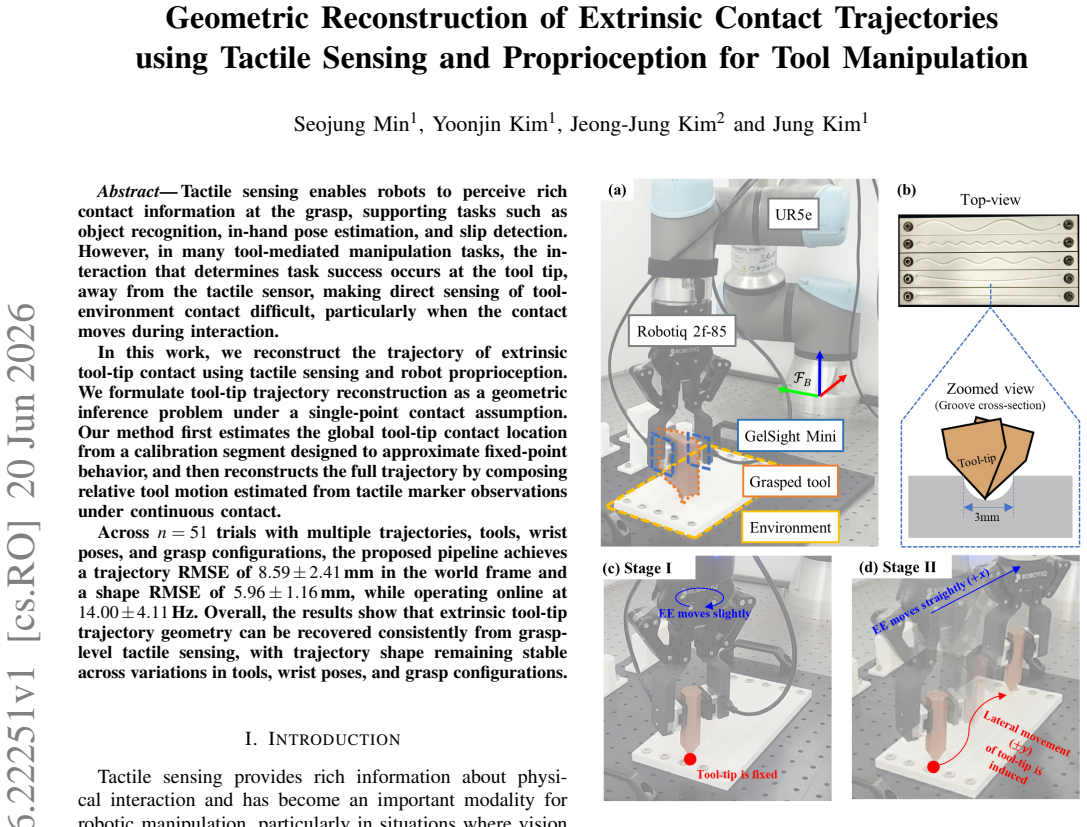
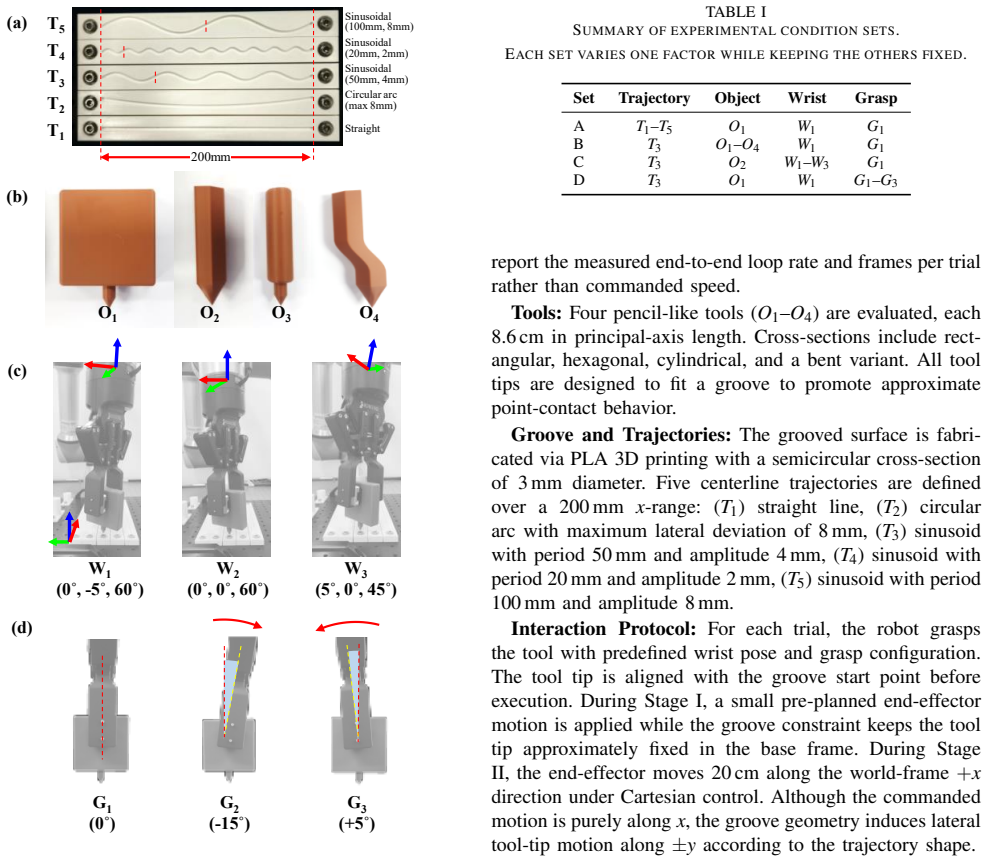
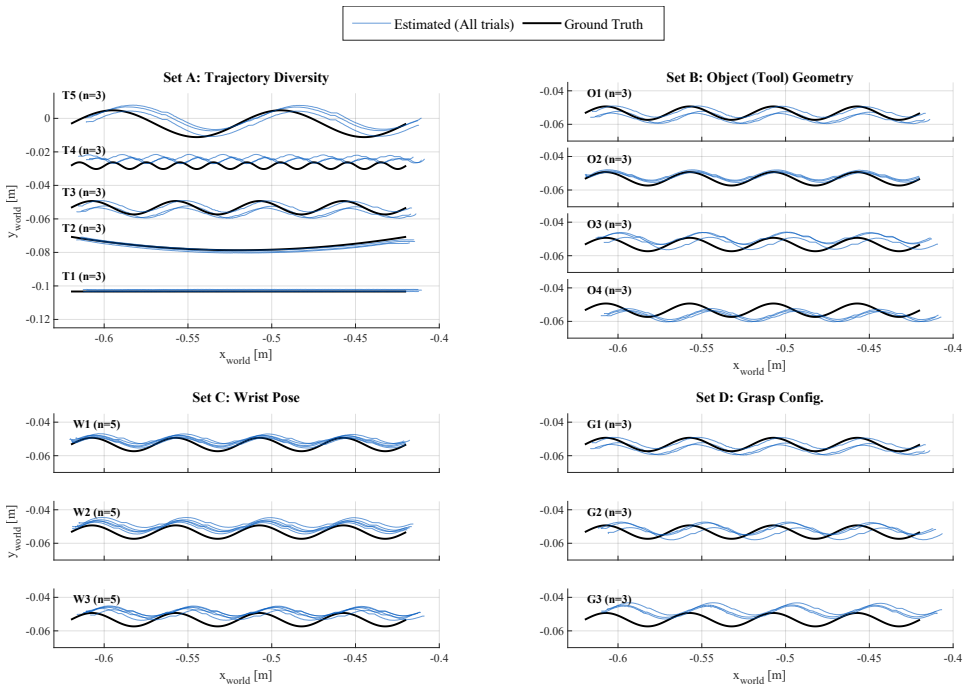
Tactile sensing enables robots to perceive rich contact information at the grasp, supporting tasks such as object recognition, in-hand pose estimation, and slip detection. However, in many tool-mediated manipulation tasks, the interaction that determines task success occurs at the tool tip, away from the tactile sensor, making direct sensing of tool-environment contact difficult, particularly when the contact moves during interaction. In this work, we reconstruct the trajectory of extrinsic tool-tip contact using tactile sensing and robot proprioception. We formulate tool-tip trajectory reconstruction as a geometric inference problem under a single-point contact assumption. Our method first estimates the global tool-tip contact location from a calibration segment designed to approximate fixed-point behavior, and then reconstructs the full trajectory by composing relative tool motion estimated from tactile marker observations under continuous contact. Across n=51 trials with multiple trajectories, tools, wrist poses, and grasp configurations, the proposed pipeline achieves a trajectory RMSE of 8.59 +/- 2.41 mm in the world frame and a shape RMSE of 5.96 +/- 1.16 mm, while operating online at 14.00 +/- 4.11 Hz. Overall, the results show that extrinsic tool-tip trajectory geometry can be recovered consistently from grasp-level tactile sensing, with trajectory shape remaining stable across variations in tools, wrist poses, and grasp configurations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to reconstruct the trajectory of extrinsic tool-tip contact in tool-mediated manipulation using grasp-level tactile sensing and robot proprioception. Under a single-point contact assumption, the method first estimates the global tool-tip location from a calibration segment designed to approximate fixed-point behavior, then reconstructs the full trajectory by composing relative tool motions recovered from tactile marker observations during continuous contact. Across 51 trials varying trajectories, tools, wrist poses, and grasp configurations, it reports a world-frame trajectory RMSE of 8.59 ± 2.41 mm, shape RMSE of 5.96 ± 1.16 mm, and online operation at 14.00 ± 4.11 Hz, concluding that tip trajectory geometry can be recovered consistently from grasp sensing.
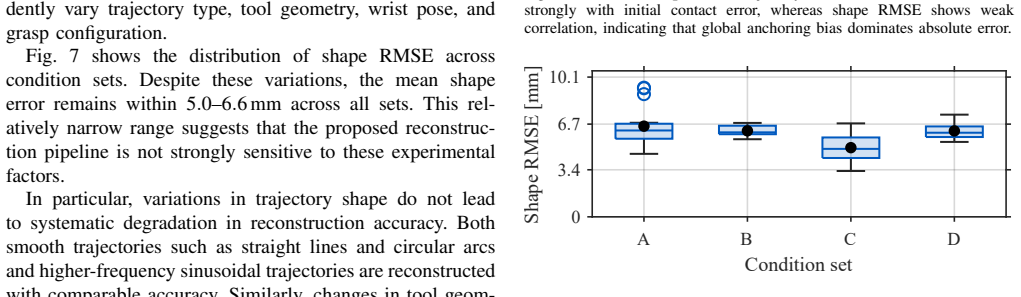
Significance. If the geometric reconstruction holds under the stated assumptions, the work provides a practical way to infer distant tool-environment contact from proximal tactile sensors, which is relevant for robotic manipulation tasks where direct tip sensing is unavailable. The multi-condition experimental results (n=51) and reported online frequency demonstrate consistency of trajectory shape recovery, which could support downstream applications in tool use if the load-bearing assumptions are validated.
major comments (2)
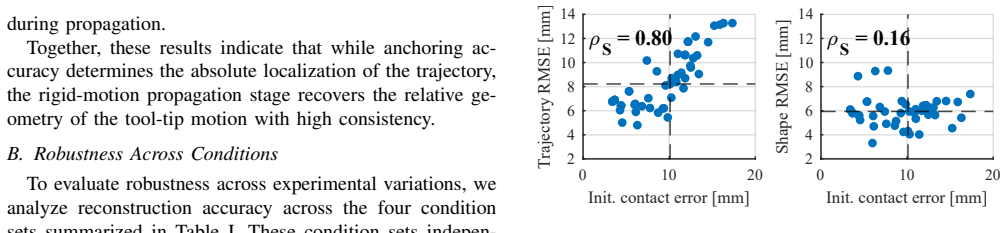
- [Abstract / Method] Abstract and Method (implied in the geometric inference formulation): The single-point contact assumption and the calibration-segment fixed-point approximation are load-bearing for the composition of relative motions, yet the manuscript provides no independent verification (e.g., via ground-truth contact imaging or force-torque analysis) that these hold during the continuous-contact phase; violation would introduce unrecoverable offset or drift in the integrated trajectory.
- [Experiments] Experiments section: While the n=51 trials support the reported RMSE values under the tested conditions, there is no ablation or failure-case analysis for scenarios where contact deviates from a single point (e.g., rolling or compliance) or where the calibration segment does not approximate fixed-point behavior, leaving the robustness of the central claim untested.
minor comments (2)
- [Abstract] The abstract states performance metrics but omits any derivation details, error-propagation analysis, or explicit handling of contact loss; adding these would improve verifiability without altering the core contribution.
- [Method] Notation for the relative-motion composition and marker observations could be clarified with an explicit equation or diagram in the method description to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for their constructive comments. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract / Method] The single-point contact assumption and the calibration-segment fixed-point approximation are load-bearing for the composition of relative motions, yet the manuscript provides no independent verification (e.g., via ground-truth contact imaging or force-torque analysis) that these hold during the continuous-contact phase; violation would introduce unrecoverable offset or drift in the integrated trajectory.
Authors: We agree the single-point contact assumption and fixed-point calibration approximation are central to the geometric composition of relative motions, as formulated in the method. The calibration segment is designed specifically to enable global tip localization under this approximation. Our n=51 trials demonstrate consistent reconstruction performance, but we acknowledge the absence of independent verification (such as force-torque or imaging data) during continuous contact. In revision we will add an explicit paragraph in the Discussion section stating the assumptions, their role in preventing drift, and the conditions under which violation could affect results. revision: partial
-
Referee: [Experiments] While the n=51 trials support the reported RMSE values under the tested conditions, there is no ablation or failure-case analysis for scenarios where contact deviates from a single point (e.g., rolling or compliance) or where the calibration segment does not approximate fixed-point behavior, leaving the robustness of the central claim untested.
Authors: The 51 trials systematically vary trajectories, tools, wrist poses, and grasp configurations while remaining within the single-point regime, supporting the reported RMSE and shape metrics. We did not include explicit ablations or failure cases for multi-point contact or non-ideal calibration because the work centers on validating the inference pipeline under the stated assumptions. In revision we will add a limitations subsection to the Experiments and Discussion sections that discusses these scenarios and identifies them as future work. revision: yes
Circularity Check
No circularity; derivation is self-contained geometric composition
full rationale
The paper presents a geometric inference pipeline: calibrate global tool-tip location from a fixed-point approximation segment, then compose relative motions recovered from tactile marker observations under a single-point contact assumption. Reported RMSE values are computed against independent external observations (world-frame and shape metrics). No equations, parameters, or steps reduce by construction to fitted inputs, self-definitions, or self-citation chains; the calibration segment and marker data remain independent of the final performance numbers. This matches the default expectation of no significant circularity.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption single-point contact assumption
- domain assumption calibration segment approximates fixed-point behavior
Reference graph
Works this paper leans on
-
[1]
Gelsight: High-resolution robot tactile sensors for estimating geometry and force,
W. Yuan, S. Dong, and E. H. Adelson, “Gelsight: High-resolution robot tactile sensors for estimating geometry and force,”Sensors, vol. 17, no. 12, p. 2762, 2017
2017
-
[2]
Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation,
M. Lambeta, P.-W. Chou, S. Tian, B. Yang, B. Maloon, V . R. Most, D. Stroud, R. Santos, A. Byagowi, G. Kammereret al., “Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation,”IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 3838–3845, 2020
2020
-
[3]
The tactip family: Soft optical tactile sensors with 3d-printed biomimetic morphologies,
B. Ward-Cherrier, N. Pestell, L. Cramphorn, B. Winstone, M. E. Giannaccini, J. Rossiter, and N. F. Lepora, “The tactip family: Soft optical tactile sensors with 3d-printed biomimetic morphologies,”Soft robotics, vol. 5, no. 2, pp. 216–227, 2018
2018
-
[4]
Gelslim 3.0: High-resolution measurement of shape, force and slip in a compact tactile-sensing finger,
I. H. Taylor, S. Dong, and A. Rodriguez, “Gelslim 3.0: High-resolution measurement of shape, force and slip in a compact tactile-sensing finger,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 10 781–10 787
2022
-
[5]
9dtact: A compact vision-based tactile sensor for accurate 3d shape reconstruction and generalizable 6d force estimation,
C. Lin, H. Zhang, J. Xu, L. Wu, and H. Xu, “9dtact: A compact vision-based tactile sensor for accurate 3d shape reconstruction and generalizable 6d force estimation,”IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 923–930, 2023
2023
-
[6]
Tactile robotics: An outlook,
S. Luo, N. F. Lepora, W. Yuan, K. Althoefer, G. Cheng, and R. Dahiya, “Tactile robotics: An outlook,”IEEE Transactions on Robotics, 2025
2025
-
[7]
Classification of vision-based tactile sensors: A review,
H. Li, Y . Lin, C. Lu, M. Yang, E. Psomopoulou, and N. F. Lepora, “Classification of vision-based tactile sensors: A review,”IEEE Sen- sors Journal, 2025
2025
-
[8]
Single- grasp object classification and feature extraction with simple robot hands and tactile sensors,
A. J. Spiers, M. V . Liarokapis, B. Calli, and A. M. Dollar, “Single- grasp object classification and feature extraction with simple robot hands and tactile sensors,”IEEE transactions on haptics, vol. 9, no. 2, pp. 207–220, 2016
2016
-
[9]
Iterative closest labeled point for tactile object shape recognition,
S. Luo, W. Mou, K. Althoefer, and H. Liu, “Iterative closest labeled point for tactile object shape recognition,” in2016 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS). IEEE, 2016, pp. 3137–3142
2016
-
[10]
Shape-independent hardness estimation using deep learning and a gelsight tactile sensor,
W. Yuan, C. Zhu, A. Owens, M. A. Srinivasan, and E. H. Adelson, “Shape-independent hardness estimation using deep learning and a gelsight tactile sensor,” in2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2017, pp. 951–958
2017
-
[11]
Vitac: Feature sharing between vision and tactile sensing for cloth texture recognition,
S. Luo, W. Yuan, E. Adelson, A. G. Cohn, and R. Fuentes, “Vitac: Feature sharing between vision and tactile sensing for cloth texture recognition,” in2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018, pp. 2722–2727
2018
-
[12]
In-hand object pose estimation using covariance-based tactile to geometry matching,
J. Bimbo, S. Luo, K. Althoefer, and H. Liu, “In-hand object pose estimation using covariance-based tactile to geometry matching,”IEEE Robotics and Automation Letters, vol. 1, no. 1, pp. 570–577, 2016
2016
-
[13]
Tactile object pose estimation from the first touch with geometric contact rendering,
M. B. Villalonga, A. Rodriguez, B. Lim, E. Valls, and T. Sechopoulos, “Tactile object pose estimation from the first touch with geometric contact rendering,” inConference on Robot Learning. PMLR, 2021, pp. 1015–1029
2021
-
[14]
Tac2pose: Tactile object pose estimation from the first touch,
M. Bauza, A. Bronars, and A. Rodriguez, “Tac2pose: Tactile object pose estimation from the first touch,”The International Journal of Robotics Research, vol. 42, no. 13, pp. 1185–1209, 2023
2023
-
[15]
Tactile pose estimation and policy learning for unknown object manipulation,
T. Kelestemur, R. Platt, and T. Padir, “Tactile pose estimation and policy learning for unknown object manipulation,” inProceedings of the 21st International Conference on Autonomous Agents and Multiagent Systems, 2022, pp. 742–750
2022
-
[16]
In- hand object classification and pose estimation with sim-to-real tactile transfer for robotic manipulation,
S. Yang, W. D. Kim, H. Park, S. Min, H. Han, and J. Kim, “In- hand object classification and pose estimation with sim-to-real tactile transfer for robotic manipulation,”IEEE Robotics and Automation Letters, vol. 9, no. 1, pp. 659–666, 2023
2023
-
[17]
Pose-and-shear-based tactile servoing,
J. Lloyd and N. F. Lepora, “Pose-and-shear-based tactile servoing,” The International Journal of Robotics Research, vol. 43, no. 7, pp. 1024–1055, 2024
2024
-
[18]
Shear-based grasp control for multi-fingered underactuated tactile robotic hands,
C. J. Ford, H. Li, M. G. Catalano, M. Bianchi, E. Psomopoulou, and N. F. Lepora, “Shear-based grasp control for multi-fingered underactuated tactile robotic hands,”IEEE Transactions on Robotics, 2025
2025
-
[19]
Tactile control for object tracking and dynamic contour following,
K. Aquilina, D. A. Barton, and N. F. Lepora, “Tactile control for object tracking and dynamic contour following,”Robotics and Autonomous Systems, vol. 178, p. 104710, 2024
2024
-
[20]
Tactile tool manipulation,
Y . Shirai, D. K. Jha, A. U. Raghunathan, and D. Hong, “Tactile tool manipulation,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 12 597–12 603
2023
-
[21]
Tactile-driven dex- terous in-hand writing via extrinsic contact sensing,
C. Zhao, L. Xie, B. Huang, S. Wang, and D. Ma, “Tactile-driven dex- terous in-hand writing via extrinsic contact sensing,”IEEE Robotics and Automation Letters, 2025
2025
-
[22]
Perceiving extrinsic contacts from touch improves learning insertion policies,
C. Higuera, J. Ortiz, H. Qi, L. Pineda, B. Boots, and M. Mukadam, “Perceiving extrinsic contacts from touch improves learning insertion policies,”arXiv preprint arXiv:2309.16652, 2023
arXiv 2023
-
[23]
Extrinsic contact sensing with relative-motion tracking from distributed tactile measurements,
D. Ma, S. Dong, and A. Rodriguez, “Extrinsic contact sensing with relative-motion tracking from distributed tactile measurements,” in 2021 IEEE international conference on robotics and automation (ICRA). IEEE, 2021, pp. 11 262–11 268
2021
-
[24]
Active extrinsic contact sensing: Ap- plication to general peg-in-hole insertion,
S. Kim and A. Rodriguez, “Active extrinsic contact sensing: Ap- plication to general peg-in-hole insertion,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 10 241–10 247
2022
-
[25]
Simul- taneous tactile estimation and control of extrinsic contact,
S. Kim, D. K. Jha, D. Romeres, P. Patre, and A. Rodriguez, “Simul- taneous tactile estimation and control of extrinsic contact,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 12 563–12 569
2023
-
[26]
Neural contact fields: Tracking extrinsic contact with tactile sensing,
C. Higuera, S. Dong, B. Boots, and M. Mukadam, “Neural contact fields: Tracking extrinsic contact with tactile sensing,”arXiv preprint arXiv:2210.09297, 2022
arXiv 2022
-
[27]
Simultaneous contact location and object pose estimation using proprioception and tactile feedback,
A. Sipos and N. Fazeli, “Simultaneous contact location and object pose estimation using proprioception and tactile feedback,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 3233–3240
2022
-
[28]
Simultaneous extrinsic contact and in-hand pose estimation via distributed tactile sensing,
M. Van der Merwe, K. Ota, D. Berenson, N. Fazeli, and D. K. Jha, “Simultaneous extrinsic contact and in-hand pose estimation via distributed tactile sensing,”IEEE Robotics and Automation Letters, vol. 11, no. 3, pp. 2394–2401, 2026
2026
-
[29]
Object extrinsic contact surface reconstruction through extrinsic contact sensing from visuo-tactile measurements,
Y . Kim, W. D. Kim, and J. Kim, “Object extrinsic contact surface reconstruction through extrinsic contact sensing from visuo-tactile measurements,” in2025 IEEE/RSJ International Conference on Intel- ligent Robots and Systems (IROS). IEEE, 2025, pp. 20 968–20 973
2025
-
[30]
Manipulation of unknown objects via contact configuration regulation,
N. Doshi, O. Taylor, and A. Rodriguez, “Manipulation of unknown objects via contact configuration regulation,” in2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022, pp. 2693–2699
2022
-
[31]
Texterity: Tactile ex- trinsic dexterity,
A. Bronars, S. Kim, P. Patre, and A. Rodriguez, “Texterity: Tactile ex- trinsic dexterity,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 7976–7983
2024
-
[32]
Tactile-driven non-prehensile object manipulation via extrinsic contact mode control
M. Oller, D. Berenson, and N. Fazeli, “Tactile-driven non-prehensile object manipulation via extrinsic contact mode control.”
-
[33]
A solution for the best rotation to relate two sets of vectors,
W. Kabsch, “A solution for the best rotation to relate two sets of vectors,”F oundations of Crystallography, vol. 32, no. 5, pp. 922–923, 1976
1976
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.