When Cooperation Should End: Maneuver Coordination Cancellation for Connected Automated Driving
Pith reviewed 2026-06-26 11:15 UTC · model grok-4.3
The pith
Canceling unsuitable maneuver coordinations frees vehicles sooner and raises the count of successful ones.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
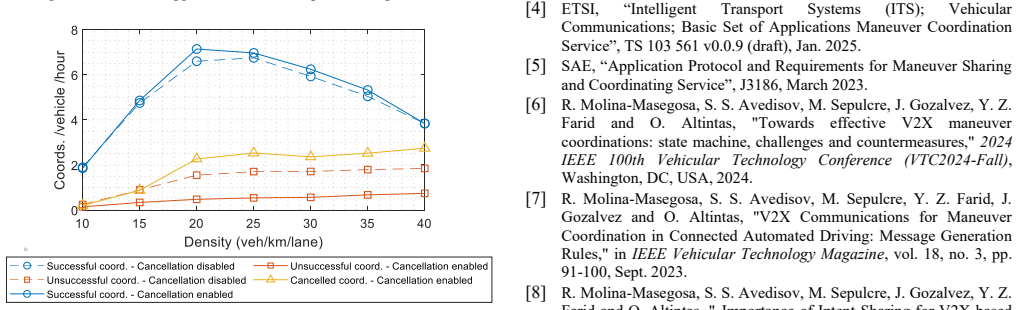
The paper establishes that a complete cancellation system, built from a state machine, a message set, and decision-making logic, allows vehicles to terminate ongoing coordinations when they become unsuitable, which reduces the time spent in failing attempts, makes vehicles available for new maneuvers sooner, and increases both the number of triggered coordinations and the number that succeed.
What carries the argument
A state machine together with a cancellation message set and decision logic that monitors coordination viability and triggers termination when success is no longer possible.
If this is right
- Vehicles locked in failing coordinations become free to attempt new ones without waiting for the original plan to time out.
- More coordinations get initiated overall because fewer vehicles remain occupied by doomed interactions.
- The fraction of initiated coordinations that reach successful completion rises.
- Cooperative driving as a whole uses negotiation resources more efficiently.
Where Pith is reading between the lines
- The same cancellation approach could be combined with existing V2X message standards to support mixed fleets.
- Decision thresholds might need adjustment when traffic density changes or when human-driven vehicles are present.
- Termination rules may prove as critical as initiation rules in any multi-vehicle negotiation system.
- Real-world deployment would require testing how often false cancellations occur and whether they create new safety issues.
Load-bearing premise
The decision logic can correctly identify which coordinations will fail in time to cancel them before they waste significant resources.
What would settle it
A simulation or test run that disables the cancellation feature and measures whether the total number of successful coordinations stays the same or drops compared with the version that includes cancellation.
Figures
read the original abstract
Maneuver coordination is essential for cooperative connected automated driving, enabling vehicles to negotiate maneuvers and interactions through V2X communication. While prior work has largely focused on how to initiate and execute coordinations, considerably less attention has been given to how ongoing coordinations should be terminated when they become unsuitable. This paper introduces the first complete design and implementation of maneuver coordination cancellation, including a state machine, message set, and decision-making logic. Our evaluation shows that cancellation significantly reduces the time vehicles spend in coordinations that cannot succeed, allowing them to become available for new maneuvers sooner. This increases the number of triggered coordinations and improves the number of successful maneuver coordinations. Overall, the study demonstrates that maneuver coordination cancellation improves cooperative driving, and establishes a foundation for further refinements that can enhance the efficiency and robustness of connected automated driving.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the first complete design and implementation of maneuver coordination cancellation for connected automated driving. It includes a state machine, message set, and decision-making logic for terminating unsuitable ongoing coordinations. The evaluation claims that this approach significantly reduces the time vehicles spend in coordinations that cannot succeed, allowing earlier availability for new maneuvers and thereby increasing both the number of triggered coordinations and the number of successful ones.
Significance. If the results hold, the work addresses an under-explored aspect of V2X-based cooperative driving by providing a mechanism to abort failing coordinations, which could improve overall efficiency and resource utilization in connected automated vehicles. The explicit design artifacts (state machine and messages) offer a concrete foundation for extensions in robustness and integration with existing maneuver coordination protocols.
major comments (1)
- [Decision-making logic and evaluation] Decision-making logic and evaluation sections: The headline result—that cancellation reduces time in failing coordinations and raises successful ones—depends on the state machine and decision logic correctly classifying doomed coordinations. No criteria, thresholds, robustness arguments, or validation against packet loss, sensor noise, or non-cooperative drivers are supplied, leaving the measured gains unverifiable and the central claim unsupported by evidence.
minor comments (1)
- [Abstract] The abstract states qualitative benefits without referencing any quantitative metrics, simulation parameters, or baselines; this should be aligned with the evaluation section for consistency.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the novelty of the maneuver coordination cancellation design. We address the major comment below.
read point-by-point responses
-
Referee: [Decision-making logic and evaluation] Decision-making logic and evaluation sections: The headline result—that cancellation reduces time in failing coordinations and raises successful ones—depends on the state machine and decision logic correctly classifying doomed coordinations. No criteria, thresholds, robustness arguments, or validation against packet loss, sensor noise, or non-cooperative drivers are supplied, leaving the measured gains unverifiable and the central claim unsupported by evidence.
Authors: We agree that the evaluation's validity hinges on clear specification of the decision logic and its robustness. Section 3 of the manuscript presents the state machine, message set, and decision-making logic, including cancellation triggers based on coordination state stagnation and protocol timeouts. However, explicit numerical thresholds, formal robustness arguments, and validation under packet loss, sensor noise, or non-cooperative drivers are indeed not provided. We will revise the manuscript to add a new subsection in Section 3 detailing the exact criteria and thresholds employed in the simulations, include a robustness analysis section discussing protocol-level mitigations, and extend the evaluation in Section 4 with additional scenarios incorporating these impairments to substantiate the reported gains. revision: yes
Circularity Check
No circularity: design proposal with independent simulation evaluation
full rationale
The paper presents a novel state machine, message set, and decision-making logic for maneuver coordination cancellation, evaluated via simulation to show reduced time in unsuccessful coordinations. No equations, derivations, parameter fittings, or self-citation chains appear in the provided text or abstract. The claims rest on the proposed implementation's measured outcomes rather than reducing to inputs by construction, making the work self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Cooperative Automated Driving Use Cases for 5G V2X Communication,
I. Llatser, T. Michalke, M. Dolgov, F. Wildschütte and H. Fuchs, "Cooperative Automated Driving Use Cases for 5G V2X Communication," 2019 IEEE 2nd 5G World Forum (5GWF), Dresden, Germany, 2019, pp. 120-125
2019
-
[2]
A Generic Approach towards Maneuver Coordination for Automated Vehicles,
B. Lehmann, H. J. Günther and L. Wolf, “A Generic Approach towards Maneuver Coordination for Automated Vehicles,” Proc. IEEE 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, Hawaii, USA, pp. 3333-3339, 4-7 Nov. 2018
2018
-
[3]
A Survey on Cooperative Architectures and Maneuvers for Connected and Automated Vehicles,
Häfner, V. Bajpai, J. Ott and G. A. Schmitt, "A Survey on Cooperative Architectures and Maneuvers for Connected and Automated Vehicles," in IEEE Communications Surveys & Tutorials, vol. 24, 2022
2022
-
[4]
Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications Maneuver Coordination Service
ETSI, “Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications Maneuver Coordination Service”, TS 103 561 v0.0.9 (draft), Jan. 2025
2025
-
[5]
Application Protocol and Requirements for Maneuver Sharing and Coordinating Service
SAE, “Application Protocol and Requirements for Maneuver Sharing and Coordinating Service”, J3186, March 2023
2023
-
[6]
Towards effective V2X maneuver coordinations: state machine, challenges and countermeasures,
R. Molina-Masegosa, S. S. Avedisov, M. Sepulcre, J. Gozalvez, Y. Z. Farid and O. Altintas, "Towards effective V2X maneuver coordinations: state machine, challenges and countermeasures," 2024 IEEE 100th Vehicular Technology Conference (VTC2024 -Fall), Washington, DC, USA, 2024
2024
-
[7]
V2X Communications for Maneuver Coordination in Connected Automated Driving: Message Generation Rules,
R. Molina -Masegosa, S. S. Avedisov, M. Sepulcre, Y. Z. Farid, J. Gozalvez and O. Altintas, "V2X Communications for Maneuver Coordination in Connected Automated Driving: Message Generation Rules," in IEEE Vehicular Technology Magazine , vol. 18, no. 3, pp. 91-100, Sept. 2023
2023
-
[8]
Importance of Intent -Sharing for V2X -based Maneuver Coordination,
R. Molina-Masegosa, S. S. Avedisov, M. Sepulcre, J. Gozalvez, Y. Z. Farid and O. Altintas, " Importance of Intent -Sharing for V2X -based Maneuver Coordination," 2025 IEEE 102nd Vehicular Technology Conference (VTC2025-Fall), Chengdu, China, 2025
2025
-
[9]
Traffic flow dynamics. Traffic Flow Dynamics: Data, Models and Simulation
M. Treiber, A. Kesting, “Traffic flow dynamics. Traffic Flow Dynamics: Data, Models and Simulation”, Springer Berlin, Heidelberg, ISBN 978-3-642-32459-8, 2013
2013
-
[10]
Highway Mobility and Vehicular Ad-Hoc Networks in ns-3,
H. Arbabi and Michele C. Weigle, “Highway Mobility and Vehicular Ad-Hoc Networks in ns-3,” Proc. of the Winter Simulation Conference. Baltimore, MD, USA, pp. 2991-3003, 5-8 Dec. 2010
2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.