Dreaming when Necessary: Advancing World Action Models with Adaptive Multi-Modal Reasoning
Pith reviewed 2026-06-27 21:58 UTC · model grok-4.3
The pith
AdaWAM adds a lightweight dynamic router to world action models so they switch between textual and visual reasoning as the task context changes.
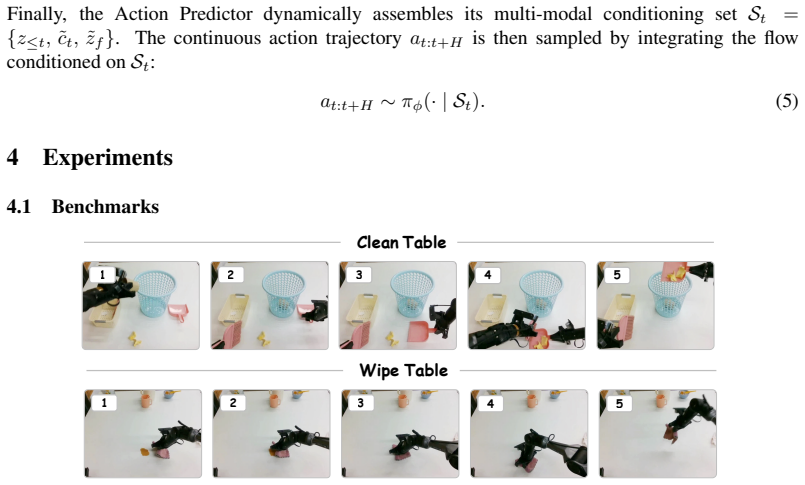
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
AdaWAM is a world action model with adaptive multimodal reasoning. It integrates a lightweight dynamic router that autonomously triggers textual or visual reasoning as needed during task execution. Experiments on both simulated and real-world embodied tasks show that AdaWAM substantially improves inference efficiency while outperforming state-of-the-art embodied policies.
What carries the argument
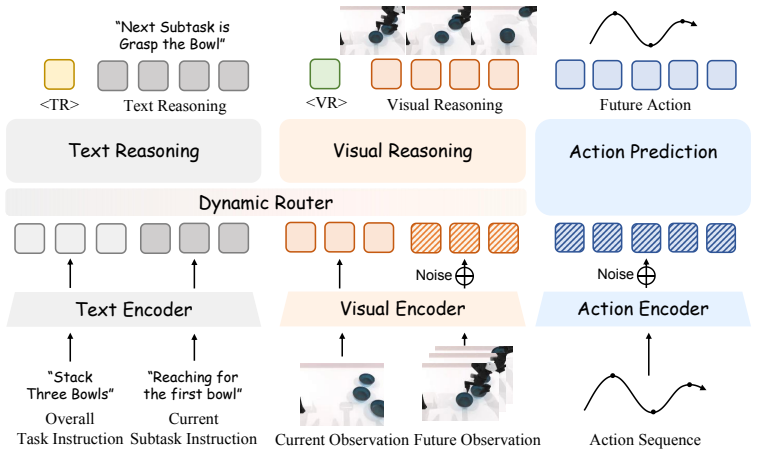
A lightweight dynamic router that autonomously selects and triggers either textual or visual reasoning mode according to current execution context.
If this is right
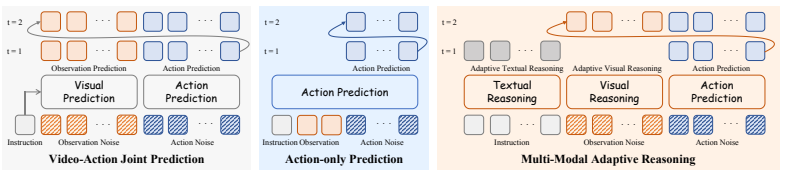
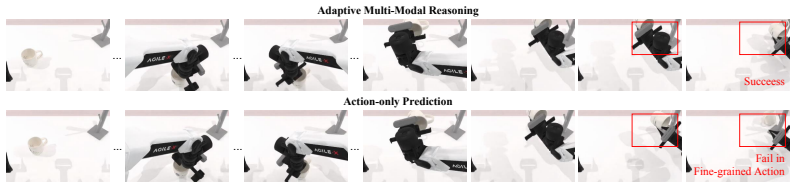
- Textual reasoning activates mainly at task transitions to supply high-level action guidance.
- Visual reasoning activates during fine-grained manipulation steps to supply precise control.
- The same model handles both high-level planning and low-level control without separate modules.
- Inference cost drops because expensive visual reasoning runs only when required.
Where Pith is reading between the lines
- Similar lightweight routers could be added to other multimodal agents that currently run all modalities at every step.
- The separation of textual and visual modes may generalize to additional modalities such as audio or proprioception in future embodied systems.
- If the router decision can be made from cheap context features, the approach could scale to longer-horizon tasks where full visual prediction at every step becomes prohibitive.
Load-bearing premise
The lightweight dynamic router can autonomously and correctly select between textual and visual reasoning modes based solely on execution context without errors or extra supervision.
What would settle it
A controlled test in which the router is replaced by random or fixed mode selection and task success or inference time shows no improvement over the original fixed-reasoning baselines.
Figures
read the original abstract
World Action Models (WAMs) offer a promising approach to embodied intelligence, yet existing methods rely heavily on video prediction as action priors and lack adaptive multimodal reasoning, limiting their effectiveness on long-horizon, complex tasks. We observe that WAMs require different multimodal reasoning modes under different execution contexts: textual reasoning is essential during task transitions to guide high-level action prediction, while visual reasoning is critical during fine-grained manipulation for precise control. Motivated by this observation, we propose \textbf{AdaWAM}, a world action model with adaptive multimodal reasoning abilities. AdaWAM integrates a lightweight dynamic router that autonomously triggers textual or visual reasoning as needed during task execution. Experiments on both simulated and real-world embodied tasks show that AdaWAM substantially improves inference efficiency while outperforming state-of-the-art embodied policies. Codes and demos are available at: https://adawam.github.io/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces AdaWAM, an extension of world action models that incorporates adaptive multimodal reasoning via a lightweight dynamic router. The router is claimed to autonomously select textual reasoning during task transitions and visual reasoning during fine-grained manipulation, based solely on execution context and without extra supervision. Experiments on simulated and real-world embodied tasks are reported to demonstrate substantial gains in inference efficiency alongside outperformance of state-of-the-art embodied policies.
Significance. The adaptive routing idea addresses a plausible efficiency bottleneck in long-horizon embodied tasks by avoiding unnecessary visual computation. If the router's selection accuracy is high and the efficiency gains are not artifacts of reduced compute alone, the approach could meaningfully improve practical deployment of world models. The public release of code and demos strengthens reproducibility.
major comments (2)
- [Abstract and §3] Abstract and §3 (method): the claim that the router 'autonomously triggers textual or visual reasoning as needed' with 'no extra supervision' is load-bearing for both the efficiency and outperformance results, yet no router architecture, training objective, selection accuracy, or error-rate metrics are supplied; without these, it is impossible to verify that selection errors do not collapse the adaptive benefit on long-horizon tasks.
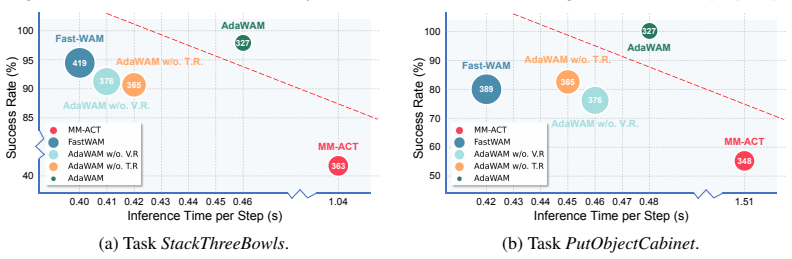
- [Experiments] Experiments section: the abstract asserts 'substantially improves inference efficiency while outperforming state-of-the-art' but supplies no quantitative metrics, baselines, ablation studies on the router, or task-length breakdowns; this prevents assessment of whether reported gains are attributable to correct multimodal switching rather than other factors.
minor comments (1)
- The GitHub link is given but the manuscript does not state the exact commit or release tag used for the reported results.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for greater detail on the router and experimental results. We address each major comment below and will incorporate the requested information in the revised manuscript.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (method): the claim that the router 'autonomously triggers textual or visual reasoning as needed' with 'no extra supervision' is load-bearing for both the efficiency and outperformance results, yet no router architecture, training objective, selection accuracy, or error-rate metrics are supplied; without these, it is impossible to verify that selection errors do not collapse the adaptive benefit on long-horizon tasks.
Authors: We agree that the router details are essential to substantiate the core claims. In the revised manuscript we will expand §3 with a full description of the router architecture, the precise self-supervised training objective that operates solely on execution context, and quantitative metrics including selection accuracy and error rates measured on held-out trajectories. These additions will enable direct verification that routing errors do not negate the adaptive efficiency gains. revision: yes
-
Referee: [Experiments] Experiments section: the abstract asserts 'substantially improves inference efficiency while outperforming state-of-the-art' but supplies no quantitative metrics, baselines, ablation studies on the router, or task-length breakdowns; this prevents assessment of whether reported gains are attributable to correct multimodal switching rather than other factors.
Authors: We concur that the current experimental presentation lacks sufficient quantitative support. The revised experiments section will report concrete efficiency and performance metrics, explicit baseline comparisons, router-specific ablations, and breakdowns by task horizon. This will clarify the contribution of adaptive multimodal switching to the observed improvements. revision: yes
Circularity Check
No circularity; empirical performance claims rest on external task benchmarks rather than self-referential definitions or fitted predictions.
full rationale
The manuscript presents AdaWAM as an architectural proposal integrating a dynamic router for mode selection, with performance gains asserted via experiments on simulated and real-world tasks. No equations, parameter-fitting procedures, or derivation chains appear in the abstract or described structure. The router is introduced as a design choice motivated by observed context differences, not derived from or equivalent to its own outputs. Claims of outperformance and efficiency are benchmark-driven and falsifiable against external baselines, satisfying the criteria for a self-contained empirical result with no load-bearing self-definition or self-citation reduction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
S. Wang, J. Shi, Z. Fu, X. He, F. Liu, C. Yang, Y . Zhou, Z. Fei, J. Gong, J. Fu, et al. World action models: The next frontier in embodied ai.arXiv preprint arXiv:2605.12090, 2026
Pith/arXiv arXiv 2026
-
[2]
S. Ye, Y . Ge, K. Zheng, S. Gao, S. Yu, G. Kurian, S. Indupuru, Y . L. Tan, C. Zhu, J. Xi- ang, A. Malik, K. Lee, W. Liang, N. Ranawaka, J. Gu, Y . Xu, G. Wang, F. Hu, A. Narayan, J. Bjorck, J. Wang, G. Kim, D. Niu, R. Zheng, Y . Xie, J. Wu, Q. Wang, R. Julian, D. Xu, Y . Du, Y . Chebotar, S. Reed, J. Kautz, Y . Zhu, L. J. Fan, and J. Jang. World action m...
Pith/arXiv arXiv 2026
-
[3]
R. Sapkota, Y . Cao, K. I. Roumeliotis, and M. Karkee. Vision-language-action models: Con- cepts, progress, applications and challenges.arXiv preprint arXiv:2505.04769, 2025
arXiv 2025
-
[4]
Y . Ma, Z. Song, Y . Zhuang, J. Hao, and I. King. A survey on vision–language–action models for embodied ai.IEEE Transactions on Neural Networks and Learning Systems, 2026
2026
- [5]
-
[6]
L. Li, Q. Zhang, Y . Luo, S. Yang, R. Wang, F. Han, M. Yu, Z. Gao, N. Xue, X. Zhu, Y . Shen, and Y . Xu. Causal world modeling for robot control.arXiv preprint arXiv:2601.21998, 2026
Pith/arXiv arXiv 2026
-
[7]
T. Yuan, Z. Dong, Y . Liu, and H. Zhao. Fast-wam: Do world action models need test-time future imagination?arXiv preprint arXiv:2603.16666, 2026
Pith/arXiv arXiv 2026
-
[8]
H. Bi, H. Tan, S. Xie, Z. Wang, S. Huang, H. Liu, R. Zhao, Y . Feng, C. Xiang, Y . Rong, et al. Motus: A unified latent action world model.arXiv preprint arXiv:2512.13030, 2025
Pith/arXiv arXiv 2025
-
[9]
B. Liu, Y . Zhu, C. Gao, Y . Feng, Q. Liu, Y . Zhu, and P. Stone. Libero: Benchmarking knowl- edge transfer for lifelong robot learning.arXiv preprint arXiv:2306.03310, 2023
Pith/arXiv arXiv 2023
-
[10]
T. Chen, Z. Chen, B. Chen, Z. Cai, Y . Liu, Q. Liang, Z. Li, X. Lin, Y . Ge, Z. Gu, et al. Robotwin 2.0: A scalable data generator and benchmark with strong domain randomization for robust bimanual robotic manipulation.arXiv preprint arXiv:2506.18088, 2025
Pith/arXiv arXiv 2025
-
[11]
Brohan, N
A. Brohan, N. Brown, J. Carbajal, Y . Chebotar, J. Dabis, C. Finn, K. Gopalakrishnan, K. Haus- man, A. Herzog, J. Hsu, J. Ibarz, B. Ichter, A. Irpan, T. Jackson, S. Jesmonth, N. J. Joshi, R. Julian, D. Kalashnikov, Y . Kuang, I. Leal, K.-H. Lee, S. Levine, Y . Lu, U. Malla, D. Manju- nath, I. Mordatch, O. Nachum, C. Parada, J. Peralta, E. Perez, K. Pertsc...
2023
-
[12]
Brohan, N
A. Brohan, N. Brown, J. Carbajal, Y . Chebotar, X. Chen, K. Choromanski, T. Ding, D. Driess, A. Dubey, C. Finn, P. Florence, C. Fu, K. Gopalakrishnan, K. Hausman, A. Herzog, J. Hsu, B. Ichter, A. Irpan, N. Joshi, R. Julian, D. Kalashnikov, I. Leal, K.-H. Lee, S. Levine, Y . Lu, H. Michalewski, I. Mordatch, K. Pertsch, K. Rao, K. Reymann, M. Ryoo, G. Salaz...
2023
-
[13]
M. J. Kim, K. Pertsch, S. Karamcheti, T. Xiao, A. Balakrishna, S. Nair, R. Rafailov, E. P. Foster, P. R. Sanketi, Q. Vuong, T. Kollar, B. Burchfiel, R. Tedrake, D. Sadigh, S. Levine, P. Liang, and C. Finn. Openvla: An open-source vision-language-action model. InProceedings of The 8th Conference on Robot Learning, volume 270 ofProceedings of Machine Learni...
2025
-
[14]
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Haus- man, B. Ichter, S. Jakubczak, T. Jones, L. Ke, S. Levine, A. Li-Bell, M. Mothukuri, S. Nair, K. Pertsch, L. X. Shi, J. Tanner, Q. Vuong, A. Walling, H. Wang, and U. Zhilinsky.π 0: A vision-language-action flow model for general robot control.arXiv preprint arXiv:2410....
Pith/arXiv arXiv 2024
-
[15]
S. Liu, L. Wu, B. Li, H. Tan, H. Chen, Z. Wang, K. Xu, H. Su, and J. Zhu. Rdt-1b: A diffusion foundation model for bimanual manipulation.arXiv preprint arXiv:2410.07864, 2024
Pith/arXiv arXiv 2024
-
[16]
J. Bjorck, F. Castaneda, N. Cherniadev, X. Da, R. Ding, L. Fan, Y . Fang, D. Fox, F. Hu, S. Huang, J. Jang, Z. Jiang, J. Kautz, K. Kundalia, L. Lao, Z. Li, Z. Lin, K. Lin, G. Liu, E. Llontop, L. Magne, A. Mandlekar, A. Narayan, S. Nasiriany, S. Reed, Y . L. Tan, G. Wang, J. Wang, Q. Wang, J. Xiang, Y . Xie, Y . Xu, Z. Xu, S. Ye, Z. Yu, A. Zhang, H. Zhang,...
Pith/arXiv arXiv 2025
-
[17]
Gemini Robotics Team, S. Abeyruwan, J. Ainslie, J.-B. Alayrac, et al. Gemini robotics: Bring- ing ai into the physical world.arXiv preprint arXiv:2503.20020, 2025
Pith/arXiv arXiv 2025
-
[18]
Zitkovich, T
B. Zitkovich, T. Yu, S. Xu, P. Xu, T. Xiao, F. Xia, J. Wu, P. Wohlhart, S. Welker, A. Wahid, Q. Vuong, V . Vanhoucke, H. Tran, R. Soricut, A. Singh, J. Singh, P. Sermanet, P. R. San- keti, G. Salazar, M. S. Ryoo, K. Reymann, K. Rao, K. Pertsch, I. Mordatch, H. Michalewski, Y . Lu, S. Levine, L. Lee, T.-W. E. Lee, I. Leal, Y . Kuang, D. Kalashnikov, R. Jul...
2023
-
[19]
Ghosh, H
D. Ghosh, H. R. Walke, K. Pertsch, K. Black, O. Mees, S. Dasari, J. Hejna, T. Kreiman, C. Xu, J. Luo, Y . L. Tan, L. Y . Chen, Q. Vuong, T. Xiao, P. R. Sanketi, D. Sadigh, C. Finn, and S. Levine. Octo: An open-source generalist robot policy. InRobotics: Science and Systems, 2024
2024
-
[21]
Q. Zhao, Y . Lu, M. J. Kim, Z. Fu, Z. Zhang, Y . Wu, Z. Li, Q. Ma, S. Han, C. Finn, A. Handa, M.-Y . Liu, D. Xiang, G. Wetzstein, and T.-Y . Lin. Cot-vla: Visual chain-of-thought reasoning for vision-language-action models. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025
2025
-
[22]
Y . Du, M. Yang, B. Dai, H. Dai, O. Nachum, J. B. Tenenbaum, D. Schuurmans, and P. Abbeel. Learning universal policies via text-guided video generation.arXiv preprint arXiv:2302.00111, 2023
arXiv 2023
-
[23]
S. Zhou, Y . Du, J. Chen, Y . Li, D.-Y . Yeung, and C. Gan. Robodreamer: Learning composi- tional world models for robot imagination.arXiv preprint arXiv:2404.12377, 2024
Pith/arXiv arXiv 2024
-
[24]
H. Bharadhwaj, D. Dwibedi, A. Gupta, S. Tulsiani, C. Doersch, T. Xiao, D. Shah, F. Xia, D. Sadigh, and S. Kirmani. Gen2act: Human video generation in novel scenarios enables generalizable robot manipulation.arXiv preprint arXiv:2409.16283, 2024
Pith/arXiv arXiv 2024
-
[25]
C. Cheang, G. Chen, Y . Jing, T. Kong, H. Li, Y . Li, M. Liu, H. Wu, J. Xu, Y . Yang, H. Zhang, and M. Zhu. Gr-2: A generative video-language-action model with web-scale knowledge for robot manipulation.arXiv preprint arXiv:2410.06158, 2024. 11
Pith/arXiv arXiv 2024
-
[26]
Y . Hu, Y . Guo, P. Wang, X. Chen, Y . Wang, J. Zhang, K. Sreenath, C. Lu, and J. Chen. Video prediction policy: A generalist robot policy with predictive visual representations.arXiv preprint arXiv:2412.14803, 2024
Pith/arXiv arXiv 2024
-
[27]
C. Zhu, R. Yu, S. Feng, B. Burchfiel, P. Shah, and A. Gupta. Unified world models: Cou- pling video and action diffusion for pretraining on large robotic datasets.arXiv preprint arXiv:2504.02792, 2025
Pith/arXiv arXiv 2025
-
[28]
J. Pai, L. Achenbach, V . Montesinos, B. Forrai, O. Mees, and E. Nava. Mimic-video: Video- action models for generalizable robot control beyond vlas.arXiv preprint arXiv:2512.15692, 2025
Pith/arXiv arXiv 2025
-
[29]
M. J. Kim, Y . Gao, T.-Y . Lin, Y . Lin, Y . Ge, G. Lam, P. Liang, S. Song, M.-Y . Liu, C. Finn, and J. Gu. Cosmos policy: Fine-tuning video models for visuomotor control and planning.arXiv preprint arXiv:2601.16163, 2026
Pith/arXiv arXiv 2026
-
[30]
M. Zawalski, W. Chen, K. Pertsch, O. Mees, C. Finn, and S. Levine. Robotic control via embodied chain-of-thought reasoning.arXiv preprint arXiv:2407.08693, 2024
Pith/arXiv arXiv 2024
-
[31]
S. Bai, Y . Cai, R. Chen, K. Chen, X. Chen, Z. Cheng, L. Deng, W. Ding, C. Gao, C. Ge, W. Ge, Z. Guo, Q. Huang, J. Huang, F. Huang, B. Hui, S. Jiang, Z. Li, M. Li, M. Li, K. Li, Z. Lin, J. Lin, X. Liu, J. Liu, C. Liu, Y . Liu, D. Liu, S. Liu, D. Lu, R. Luo, C. Lv, R. Men, L. Meng, X. Ren, X. Ren, S. Song, Y . Sun, J. Tang, J. Tu, J. Wan, P. Wang, P. Wang,...
Pith/arXiv arXiv 2025
-
[32]
J. Zheng, J. Li, Z. Wang, D. Liu, X. Kang, Y . Feng, Y . Zheng, J. Zou, Y . Chen, J. Zeng, et al. X- vla: Soft-prompted transformer as scalable cross-embodiment vision-language-action model. arXiv preprint arXiv:2510.10274, 2025
Pith/arXiv arXiv 2025
-
[33]
Q. Zhao, Y . Lu, M. J. Kim, Z. Fu, Z. Zhang, Y . Wu, Z. Li, Q. Ma, S. Han, C. Finn, et al. Cot- vla: Visual chain-of-thought reasoning for vision-language-action models. InProceedings of the Computer Vision and Pattern Recognition Conference, pages 1702–1713, 2025
2025
- [34]
- [35]
-
[36]
Q. Bu, J. Cai, L. Chen, X. Cui, Y . Ding, S. Feng, S. Gao, X. He, X. Hu, X. Huang, et al. Agibot world colosseo: A large-scale manipulation platform for scalable and intelligent embodied systems.arXiv preprint arXiv:2503.06669, 2025
Pith/arXiv arXiv 2025
-
[37]
P. Intelligence, K. Black, N. Brown, J. Darpinian, K. Dhabalia, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, et al.π 0.5: a vision-language-action model with open-world generalization. arXiv preprint arXiv:2504.16054, 2025. 12 A Detailed Information of Benchmarks LIBERO.[9] LIBERO is a benchmark for long-horizon robotic manipulation that provides 130...
Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.