He3-Seeker: Robotic Information Planning for Lunar Helium-3 Distribution Mapping
Pith reviewed 2026-06-30 09:57 UTC · model grok-4.3
The pith
He3-Seeker actively maps lunar helium-3 by directing a robot to drill, sample, and analyze at information-rich sites.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
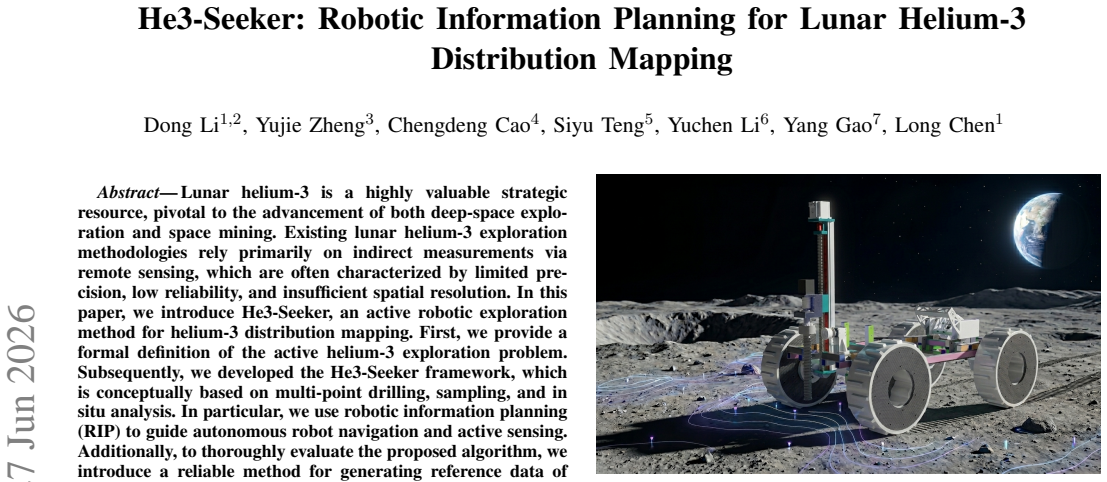
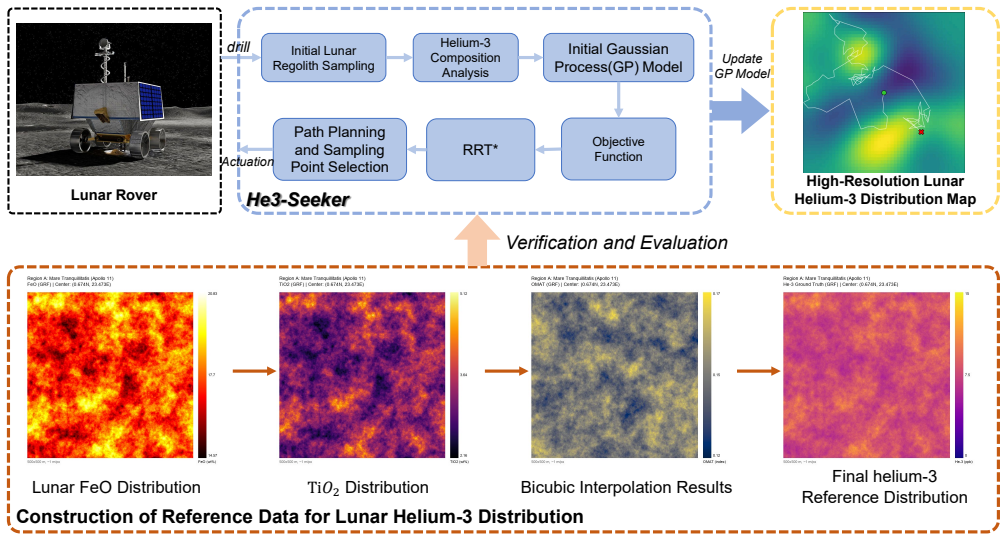
He3-Seeker is an active robotic exploration method for helium-3 distribution mapping. The framework is built on multi-point drilling, sampling, and in situ analysis, with robotic information planning guiding autonomous navigation and active sensing decisions. A method generates reference helium-3 distribution data from low-resolution orbital remote sensing measurements for evaluation, and simulation experiments show that the approach produces rapid and high-fidelity maps.
What carries the argument
Robotic information planning (RIP) that selects navigation and sensing actions to maximize information about helium-3 distribution.
If this is right
- Provides a formal definition of the active helium-3 exploration problem.
- Guides a robot through multi-point drilling, sampling, and in situ analysis using information planning.
- Generates reference distribution data from orbital measurements for algorithm evaluation.
- Demonstrates rapid and high-fidelity mapping in simulation experiments.
Where Pith is reading between the lines
- The same planning approach could direct sampling for other lunar surface resources if adapted to their measurement signatures.
- Deployment on physical rovers would need to account for terrain mobility limits and sensor noise not present in the simulations.
- Public release of the code allows others to test the method against new orbital data sets or modified planning objectives.
Load-bearing premise
The reference helium-3 distribution data generated from low-resolution orbital remote sensing measurements is accurate enough to serve as ground truth for evaluating the active exploration algorithm.
What would settle it
Direct helium-3 concentration measurements from a future landed mission that differ substantially from the distributions produced by He3-Seeker in the same regions would falsify the high-fidelity claim.
Figures
read the original abstract
Lunar helium-3 is a highly valuable strategic resource, pivotal to the advancement of both deep-space exploration and space mining. Existing lunar helium-3 exploration methodologies rely primarily on indirect measurements via remote sensing, which are often characterized by limited precision, low reliability, and insufficient spatial resolution. In this paper, we introduce He3-Seeker, an active robotic exploration method for helium-3 distribution mapping. First, we provide a formal definition of the active helium-3 exploration problem. Subsequently, we developed the He3-Seeker framework, which is conceptually based on multi-point drilling, sampling, and in situ analysis. In particular, we use robotic information planning (RIP) to guide autonomous robot navigation and active sensing. Additionally, to thoroughly evaluate the proposed algorithm, we introduce a reliable method for generating reference data of lunar helium-3 distribution based on low-resolution orbital remote sensing measurements. Simulation experiments verify that He3-Seeker achieves both rapid and high-fidelity mapping of helium-3 distribution, providing a reliable solution for resource exploration tasks. Our code and simulation environment will be publicly accessible at https://github.com/OpenSpace-Lab/He3-Seeker.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces He3-Seeker, an active robotic exploration framework for mapping lunar helium-3 distribution. It formally defines the active exploration problem, develops a robotic information planning (RIP) approach based on multi-point drilling, sampling, and in-situ analysis to guide autonomous navigation and sensing, and presents a method to generate reference helium-3 distribution data from low-resolution orbital remote sensing measurements. Simulation experiments are reported to verify that the method achieves rapid and high-fidelity mapping, with code and the simulation environment to be released publicly.
Significance. If the central claims hold after addressing validation concerns, the work could offer a practical active-sensing approach for in-situ lunar resource mapping that improves on passive remote sensing. The commitment to public code release supports reproducibility and is a clear strength.
major comments (2)
- [evaluation section] Reference data generation procedure (evaluation section): the method for producing reference helium-3 maps from low-resolution orbital data is presented without cross-validation against independent sources such as published solar-wind flux models or regolith-thickness maps. Because the simulation fidelity metrics are computed only relative to this synthetic field, the claim that experiments verify 'high-fidelity' mapping rests on an untested assumption that is load-bearing for the verification result.
- [simulation experiments section] Simulation experiments section: the abstract asserts verification of rapid and high-fidelity mapping, yet the provided description supplies no quantitative error metrics, convergence rates, or explicit formulation of the RIP planning objective (e.g., information gain versus cost). Without these details the strength of the empirical support cannot be assessed.
minor comments (1)
- [problem definition] Notation for the active exploration problem definition should be introduced with explicit symbols and constraints before the RIP algorithm description to improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on the evaluation and simulation sections. We address each point below and will revise the manuscript accordingly to strengthen the validation and empirical details.
read point-by-point responses
-
Referee: [evaluation section] Reference data generation procedure (evaluation section): the method for producing reference helium-3 maps from low-resolution orbital data is presented without cross-validation against independent sources such as published solar-wind flux models or regolith-thickness maps. Because the simulation fidelity metrics are computed only relative to this synthetic field, the claim that experiments verify 'high-fidelity' mapping rests on an untested assumption that is load-bearing for the verification result.
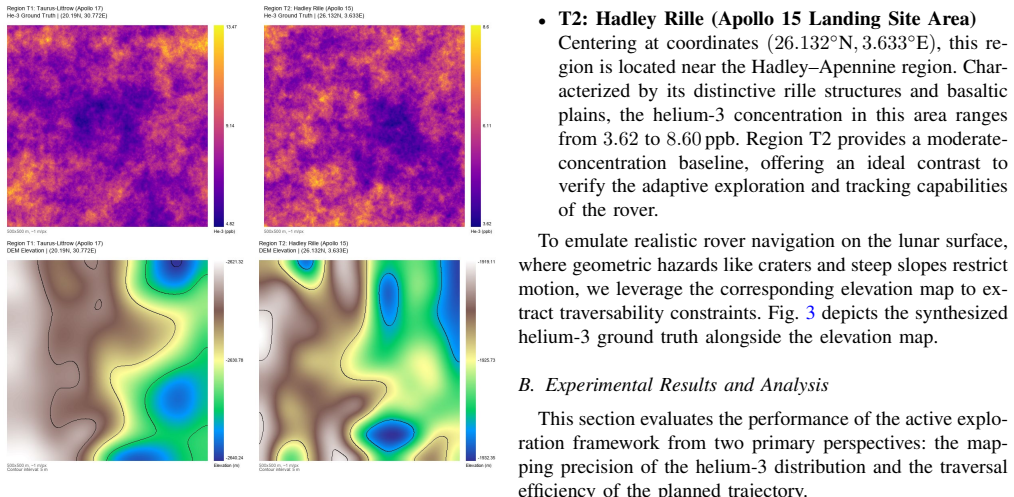
Authors: We agree that the absence of explicit cross-validation is a limitation in the current presentation. The reference data generation extrapolates helium-3 abundance from low-resolution orbital measurements using physical models of solar wind implantation and regolith properties. In revision, we will add comparisons against published solar-wind flux models and available regolith-thickness maps to provide independent validation of the synthetic field, thereby supporting the fidelity claims with additional evidence. revision: yes
-
Referee: [simulation experiments section] Simulation experiments section: the abstract asserts verification of rapid and high-fidelity mapping, yet the provided description supplies no quantitative error metrics, convergence rates, or explicit formulation of the RIP planning objective (e.g., information gain versus cost). Without these details the strength of the empirical support cannot be assessed.
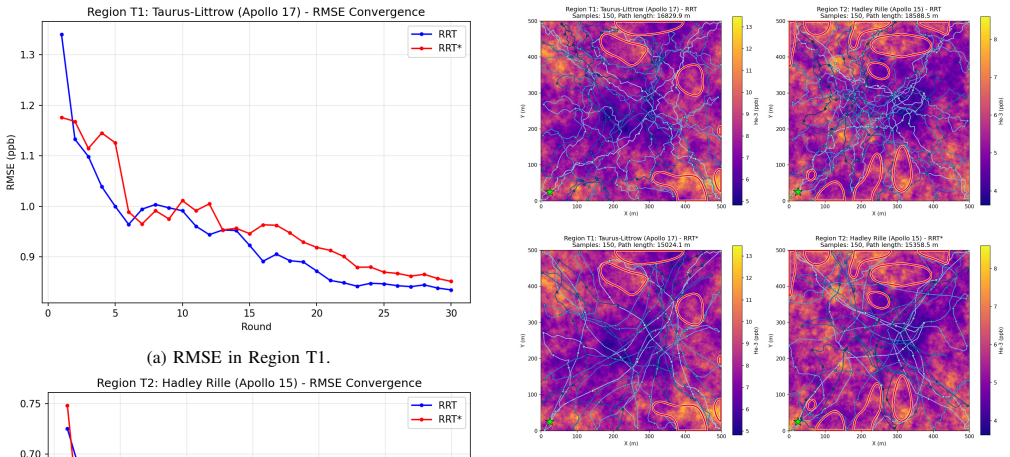
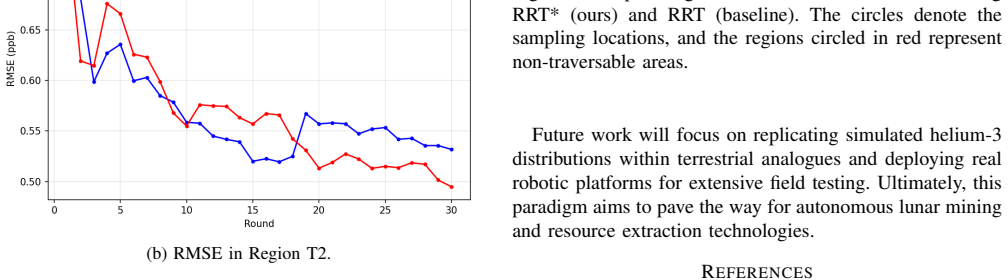
Authors: We acknowledge that the simulation experiments section requires more explicit quantitative reporting. The RIP objective is defined as maximizing expected information gain (via entropy reduction on the helium-3 distribution) while penalizing drilling and navigation costs, but this formulation and the associated metrics were not detailed sufficiently in the experiments. In the revision, we will include the mathematical formulation of the planning objective, RMSE and other error metrics between the estimated and reference maps, and convergence behavior (e.g., mapping fidelity vs. number of samples) to enable proper evaluation of the results. revision: yes
Circularity Check
No significant circularity in derivation or verification chain
full rationale
The paper defines an active exploration problem, introduces the He3-Seeker RIP-based planner, and separately introduces a reference-data generation procedure from orbital measurements. The simulation verification compares planner output to this reference, but the provided text contains no equations, fitted parameters, or self-citations that reduce the reported mapping performance to the planner inputs or to the reference generator by construction. The reference method is presented as an independent evaluation tool rather than a fitted or self-referential quantity, so the central claim remains self-contained against the stated inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
China’s present and future lunar exploration program,
C. Li, C. Wang, Y . Wei, and Y . Lin, “China’s present and future lunar exploration program,”Science, vol. 365, no. 6450, pp. 238–239, 2019
2019
-
[2]
The artemis program: An overview of nasa’s activ- ities to return humans to the moon,
M. Smith, D. Craig, N. Herrmann, E. Mahoney, J. Krezel, N. McIntyre, and K. Goodliff, “The artemis program: An overview of nasa’s activ- ities to return humans to the moon,” inIEEE Aerospace Conference, 2020, pp. 1–10
2020
-
[3]
Quantitative estimation of helium-3 spatial distribution in the lunar regolith layer,
W. Fa and Y .-Q. Jin, “Quantitative estimation of helium-3 spatial distribution in the lunar regolith layer,”Icarus, vol. 190, no. 1, pp. 15–23, 2007
2007
-
[4]
Lunar helium-3 fuel for nuclear fusion: Technology, economics, and resources,
T. Simko and M. Gray, “Lunar helium-3 fuel for nuclear fusion: Technology, economics, and resources,”World Future Review, vol. 6, no. 2, pp. 158–171, 2014
2014
-
[5]
Moon- based ground penetrating radar derivation of the helium-3 reservoir in the regolith at the chang’e-3 landing site,
C. Ding, Q. Li, J. Xu, Z. Lei, J. Li, Y . Su, and S. Huang, “Moon- based ground penetrating radar derivation of the helium-3 reservoir in the regolith at the chang’e-3 landing site,”IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 16, pp. 2764–2776, 2023
2023
-
[6]
The apollo swc experiment: results, conclusions, consequences,
J. Geiss, F. B ¨uhler, H. Cerutti, P. Eberhardt, C. Filleux, J. Meister, and P. Signer, “The apollo swc experiment: results, conclusions, consequences,”Space Science Reviews, vol. 110, no. 3, pp. 307–335, 2004
2004
-
[7]
Major lunar crustal terranes: Surface expressions and crust-mantle origins,
B. L. Jolliff, J. J. Gillis, L. A. Haskin, R. L. Korotev, and M. A. Wieczorek, “Major lunar crustal terranes: Surface expressions and crust-mantle origins,”Journal of Geophysical Research: Planets, vol. 105, no. E2, pp. 4197–4216, 2000
2000
-
[8]
He, ne, and ar isotope systematics in chang’e-5 plagioclase reveal diffusive loss and reirradiation processes,
X. Zhang, F. Su, G. Avice, D. V . Bekaert, T. Obase, Y . Otsuki, F. M. Stuart, Y . Zhang, J. Nie, X. Liet al., “He, ne, and ar isotope systematics in chang’e-5 plagioclase reveal diffusive loss and reirradiation processes,”Earth and Planetary Science Letters, vol. 671, p. 119666, 2025
2025
-
[9]
The viper mission, a resource-mapping mission on another celestial body,
K. E. Smith, A. Colaprete, D. Lim, and D. Andrews, “The viper mission, a resource-mapping mission on another celestial body,” in SRR XXII MEETING Colorado School of Mines, 2022
2022
-
[10]
Simulated real-time lunar volatiles prospecting with a rover-borne neutron spectrometer,
R. C. Elphic, J. L. Heldmann, M. M. Marinova, A. Colaprete, E. L. Fritzler, R. E. McMurray, S. Morse, T. L. Roush, C. R. Stoker, M. C. Deanset al., “Simulated real-time lunar volatiles prospecting with a rover-borne neutron spectrometer,”Advances in Space Research, vol. 55, no. 10, pp. 2438–2450, 2015
2015
-
[11]
Lunar iron and titanium abundance algorithms based on final processing of clementine ultraviolet-visible images,
P. G. Lucey, D. T. Blewett, and B. L. Jolliff, “Lunar iron and titanium abundance algorithms based on final processing of clementine ultraviolet-visible images,”Journal of Geophysical Research: Planets, vol. 105, no. E8, pp. 20 297–20 305, 2000
2000
-
[12]
Global elemental maps of the moon: The lunar prospector gamma-ray spectrometer,
D. Lawrence, W. Feldman, B. Barraclough, A. Binder, R. Elphic, S. Maurice, and D. Thomsen, “Global elemental maps of the moon: The lunar prospector gamma-ray spectrometer,”Science, vol. 281, no. 5382, pp. 1484–1489, 1998
1998
-
[13]
Lunar penetrating radar onboard the chang’e-3 mission,
G.-Y . Fang, B. Zhou, Y .-C. Ji, Q.-Y . Zhang, S.-X. Shen, Y .-X. Li, H.-F. Guan, C.-J. Tang, Y .-Z. Gao, W. Luet al., “Lunar penetrating radar onboard the chang’e-3 mission,”Research in Astronomy and Astrophysics, vol. 14, no. 12, pp. 1607–1622, 2014
2014
-
[14]
Ak: Attentive kernel for informa- tion gathering,
W. Chen, R. Khardon, and L. Liu, “Ak: Attentive kernel for informa- tion gathering,” inRobotics: Science and Systems (RSS), 2022
2022
-
[15]
Poam: probabilistic online attentive mapping for efficient robotic information gathering,
W. Chen, L. Liu, and R. Khardon, “Poam: probabilistic online attentive mapping for efficient robotic information gathering,” inRobotics: Science and Systems (RSS), 2024
2024
-
[16]
Z. Qiao, T. Hu, T.-M. Nguyen, and S. Yuan, “Multi-agent off-world exploration for sparse evidence discovery via gaussian belief mapping and dual-domain coverage,”arXiv preprint arXiv:2603.07650, 2026
-
[17]
Informative path planning for scalar dy- namic reconstruction using coregionalized gaussian processes and a spatiotemporal kernel,
L. Booth and S. Carpin, “Informative path planning for scalar dy- namic reconstruction using coregionalized gaussian processes and a spatiotemporal kernel,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 8112–8119
2023
-
[18]
Robotic active information gathering for spatial field reconstruction with rapidly-exploring ran- dom trees and online learning of gaussian processes,
A. Viseras, D. Shutin, and L. Merino, “Robotic active information gathering for spatial field reconstruction with rapidly-exploring ran- dom trees and online learning of gaussian processes,”Sensors, vol. 19, no. 5, p. 1016, 2019
2019
-
[19]
The compositions of the lunar crust and upper mantle: Spectral analysis of the inner rings of lunar impact basins,
M. Lemelin, P. G. Lucey, K. Miljkovi ´c, L. R. Gaddis, T. Hare, and M. Ohtake, “The compositions of the lunar crust and upper mantle: Spectral analysis of the inner rings of lunar impact basins,”Planetary and Space Science, vol. 165, pp. 230–243, 2019
2019
-
[20]
Mapping the feo and tio2 content of the lunar surface with multispectral imagery,
P. G. Lucey, D. T. Blewett, and B. R. Hawke, “Mapping the feo and tio2 content of the lunar surface with multispectral imagery,”Journal of Geophysical Research: Planets, vol. 103, no. E2, pp. 3679–3699, 1998
1998
-
[21]
Sampling-based algorithms for optimal motion planning,
S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,”The International Journal of Robotics Research, vol. 30, no. 7, pp. 846–894, 2011
2011
-
[22]
Randomized kinodynamic plan- ning,
S. M. LaValle and J. J. Kuffner Jr, “Randomized kinodynamic plan- ning,”The International Journal of Robotics Research, vol. 20, no. 5, pp. 378–400, 2001
2001
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.