Single-Base-Station Indoor Localization via Super-Resolved Relative Power Delay Profiles
Pith reviewed 2026-06-26 02:18 UTC · model grok-4.3
The pith
Sparse Bayesian learning reconstructs super-resolved relative power delay profiles from pilot samples to enable single-base-station indoor localization.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
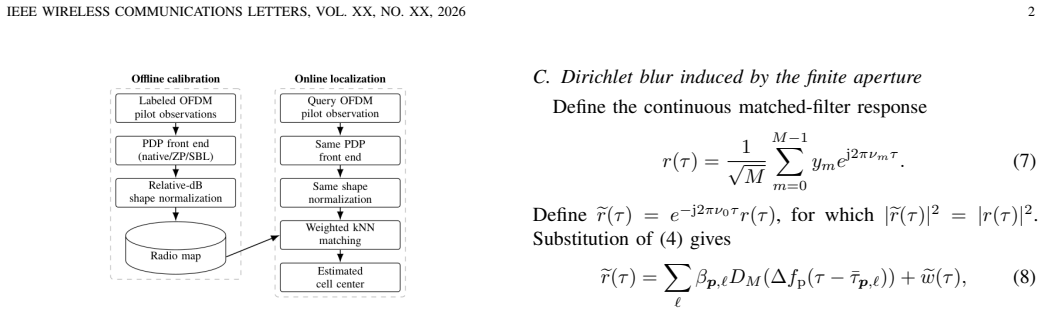
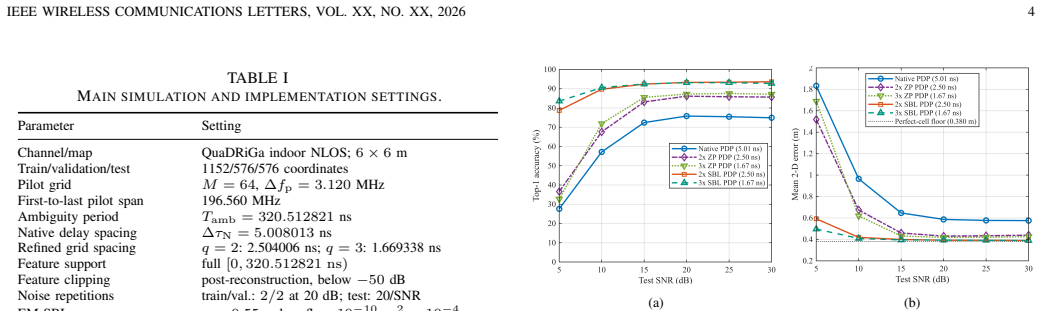
By modeling the Dirichlet blur, delay folding, and off-grid mismatch that arise when a communication receiver samples a power delay profile at finite pilot frequencies, the paper reconstructs a super-resolved posterior power profile via expectation-maximization sparse Bayesian learning. This super-resolved profile serves as a spatially consistent location fingerprint that achieves 93.27 percent top-1 accuracy and 0.392 m mean error at 20 dB SNR in spatially consistent QuaDRiGa indoor simulations, outperforming both native profiles and zero-padded versions.
What carries the argument
Expectation-maximization sparse Bayesian learning applied after explicit modeling of Dirichlet blur, delay folding, and off-grid mismatch to reconstruct super-resolved relative power-delay profiles.
Load-bearing premise
The QuaDRiGa channel model and the mathematical models of Dirichlet blur, delay folding, and off-grid mismatch sufficiently represent the observations made by a real communication receiver in actual indoor multipath environments.
What would settle it
A side-by-side measurement campaign in a real indoor testbed that records the localization error of SBL-reconstructed profiles and finds a mean error substantially larger than the reported 0.392 m would falsify the central claim.
Figures
read the original abstract
Indoor multipath is shaped by surrounding reflectors, scatterers, and blockages, so a relative power-delay profile (PDP) can serve as a location fingerprint without an identifiable LoS path, angle information, or absolute time-of-arrival ranging. However, a communication receiver observes finitely many noisy pilot-frequency samples rather than an ideal PDP. This paper models the resulting Dirichlet blur, delay folding, and off-grid mismatch, and reconstructs a posterior-power profile using expectation-maximization sparse Bayesian learning. In spatially consistent QuaDRiGa simulations, twofold SBL raises 20-dB Top-1 accuracy from 75.79\% (native PDP) and 87.24\% (threefold zero-padding) to 93.27\%, with 0.392~m mean error.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that modeling Dirichlet blur, delay folding, and off-grid mismatch in frequency-domain pilot samples, followed by expectation-maximization sparse Bayesian learning to reconstruct a super-resolved posterior power delay profile, enables improved single-base-station indoor localization via relative PDP fingerprints. In spatially consistent QuaDRiGa simulations, twofold SBL raises 20-dB Top-1 accuracy from 75.79% (native PDP) and 87.24% (threefold zero-padding) to 93.27%, with 0.392 m mean error.
Significance. If the simulation results hold, the work provides a concrete super-resolution technique for PDP-based fingerprinting that operates with a single BS and without LoS, angle, or absolute ToA information. The quantitative accuracy gains in a standard spatially consistent channel model, together with the explicit derivation of the observation operators, constitute a clear contribution. The use of EM-SBL for posterior reconstruction is a methodological strength that supports the reported performance lift.
minor comments (3)
- [Abstract] Abstract: the phrase 'spatially consistent QuaDRiGa simulations' would benefit from a one-sentence parenthetical note on the model's key assumptions (e.g., ray-tracing parameters, bandwidth) to set reader expectations for generalizability.
- [Section 5] Section 5 (results): the 0.392 m mean error figure would be more informative if accompanied by the underlying grid resolution or by a direct comparison against the native PDP grid spacing.
- The manuscript could add a short paragraph in the discussion or conclusion explicitly addressing the gap between the modeled observation process and potential hardware impairments present in real communication receivers.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation of the manuscript, the recognition of its contribution, and the recommendation for minor revision. No major comments were provided in the report.
Circularity Check
No significant circularity
full rationale
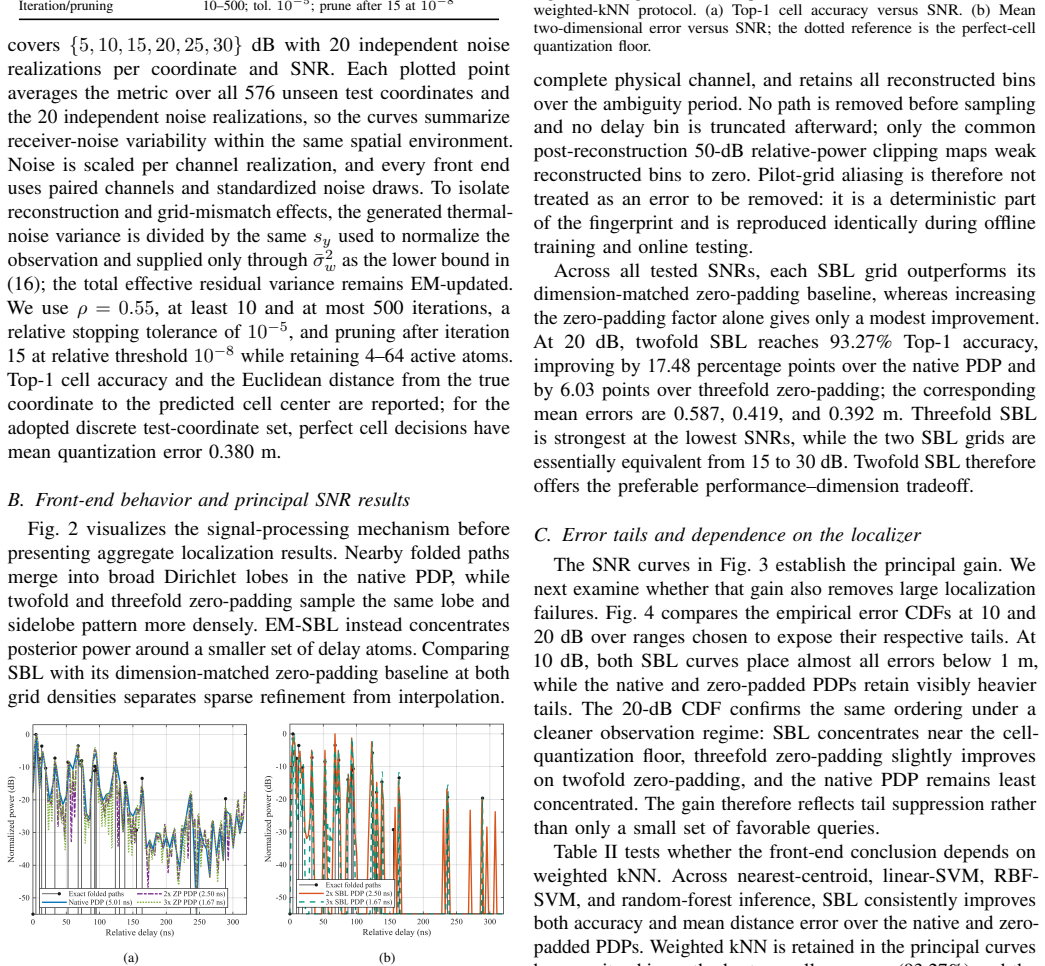
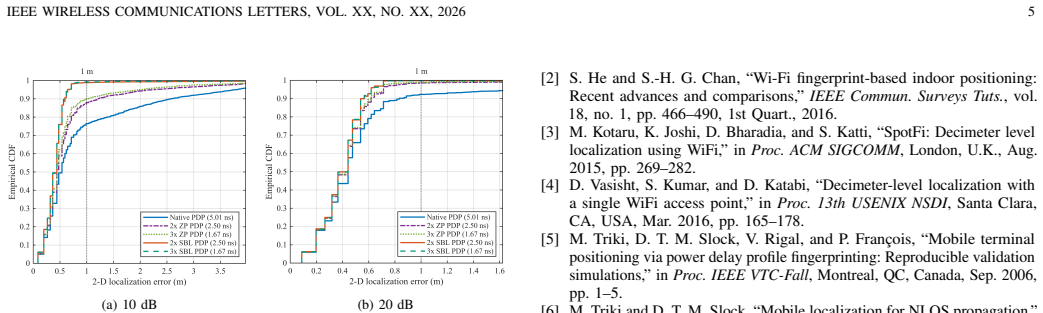
The paper models Dirichlet blur, delay folding and off-grid mismatch from finite pilot samples, then applies expectation-maximization sparse Bayesian learning to obtain a posterior power profile; the reported Top-1 accuracy and mean-error figures are obtained by feeding independent QuaDRiGa channel realizations through this pipeline. No equation reduces a fitted parameter to a prediction by construction, no load-bearing premise rests on a self-citation chain, and the simulation results are external to the reconstruction operators themselves.
Axiom & Free-Parameter Ledger
free parameters (1)
- SBL hyperparameters
axioms (2)
- domain assumption A relative power-delay profile can serve as a location fingerprint without identifiable LoS, angle, or absolute ToA information
- standard math The receiver observes finitely many noisy pilot-frequency samples subject to Dirichlet blur, delay folding, and off-grid mismatch
Reference graph
Works this paper leans on
-
[1]
RADAR: An in-building RF-based user location and tracking system,
P. Bahl and V . N. Padmanabhan, “RADAR: An in-building RF-based user location and tracking system,” inProc. IEEE INFOCOM, Tel Aviv, Israel, Mar. 2000, vol. 2, pp. 775–784
2000
-
[2]
Wi-Fi fingerprint-based indoor positioning: Recent advances and comparisons,
S. He and S.-H. G. Chan, “Wi-Fi fingerprint-based indoor positioning: Recent advances and comparisons,”IEEE Commun. Surveys Tuts., vol. 18, no. 1, pp. 466–490, 1st Quart., 2016
2016
-
[3]
SpotFi: Decimeter level localization using WiFi,
M. Kotaru, K. Joshi, D. Bharadia, and S. Katti, “SpotFi: Decimeter level localization using WiFi,” inProc. ACM SIGCOMM, London, U.K., Aug. 2015, pp. 269–282
2015
-
[4]
Decimeter-level localization with a single WiFi access point,
D. Vasisht, S. Kumar, and D. Katabi, “Decimeter-level localization with a single WiFi access point,” inProc. 13th USENIX NSDI, Santa Clara, CA, USA, Mar. 2016, pp. 165–178
2016
-
[5]
Mobile terminal positioning via power delay profile fingerprinting: Reproducible validation simulations,
M. Triki, D. T. M. Slock, V . Rigal, and P. François, “Mobile terminal positioning via power delay profile fingerprinting: Reproducible validation simulations,” inProc. IEEE VTC-Fall, Montreal, QC, Canada, Sep. 2006, pp. 1–5
2006
-
[6]
Mobile localization for NLOS propagation,
M. Triki and D. T. M. Slock, “Mobile localization for NLOS propagation,” inProc. IEEE PIMRC, Athens, Greece, Sep. 2007, pp. 1–4
2007
-
[7]
Power delay Doppler profile fingerprinting for mobile localization in NLOS,
T. M. Oktem and D. T. M. Slock, “Power delay Doppler profile fingerprinting for mobile localization in NLOS,” inProc. IEEE PIMRC, Istanbul, Turkey, Sep. 2010, pp. 876–881
2010
-
[8]
Power delay profile based indoor fingerprinting localization system,
G. Ding, P. Chen, J. Tian, and Q. Zhao, “Power delay profile based indoor fingerprinting localization system,” inProc. 18th Int. Conf. Advanced Commun. Technol., Pyeongchang, South Korea, Jan. 2016, pp. 324–329
2016
-
[9]
Multipath component power delay profile based ranging,
F. Xiao, Z. Zhao, and D. T. M. Slock, “Multipath component power delay profile based ranging,”IEEE J. Sel. Topics Signal Process., vol. 18, no. 5, pp. 950–963, Jul. 2024
2024
-
[10]
F. Xiao, Z. Li, and D. T. M. Slock, “Multipath component power delay profile based joint range and Doppler estimation for AFDM- ISAC systems,”IEEE Trans. Commun., early access, Apr. 2026, doi: 10.1109/TCOMM.2026.3686728
-
[11]
Precise power delay profiling with commodity Wi-Fi,
Y . Xie, Z. Li, and M. Li, “Precise power delay profiling with commodity Wi-Fi,”IEEE Trans. Mobile Comput., vol. 18, no. 6, pp. 1342–1355, Jun. 2019
2019
-
[12]
Compressed channel sensing: A new approach to estimating sparse multipath channels,
W. U. Bajwa, J. Haupt, A. M. Sayeed, and R. Nowak, “Compressed channel sensing: A new approach to estimating sparse multipath channels,” Proc. IEEE, vol. 98, no. 6, pp. 1058–1076, Jun. 2010
2010
-
[13]
Sparse Bayesian learning for channel estimation in time-varying underwater acoustic OFDM communication,
G. Qiao, Q. Song, L. Ma, S. Liu, Z. Sun, and S. Gan, “Sparse Bayesian learning for channel estimation in time-varying underwater acoustic OFDM communication,”IEEE Access, vol. 6, pp. 56675–56684, 2018
2018
-
[14]
Towards a mathematical theory of super-resolution,
E. J. Candès and C. Fernández-Granda, “Towards a mathematical theory of super-resolution,”Commun. Pure Appl. Math., vol. 67, no. 6, pp. 906–956, Jun. 2014
2014
-
[15]
Compressed sensing off the grid,
G. Tang, B. N. Bhaskar, P. Shah, and B. Recht, “Compressed sensing off the grid,”IEEE Trans. Inf. Theory, vol. 59, no. 11, pp. 7465–7490, Nov. 2013
2013
-
[16]
Off-grid direction of arrival estimation using sparse Bayesian inference,
Z. Yang, L. Xie, and C. Zhang, “Off-grid direction of arrival estimation using sparse Bayesian inference,”IEEE Trans. Signal Process., vol. 61, no. 1, pp. 38–43, Jan. 2013
2013
-
[17]
Fingerprinting localization based on super resolution CSI features,
Z. Uykan, H. Al-Tous, O. Tirkkonen, and R. Jäntti, “Fingerprinting localization based on super resolution CSI features,”IEEE Access, vol. 14, pp. 49750–49767, 2026
2026
-
[18]
Robust frequency and timing synchroniza- tion for OFDM,
T. M. Schmidl and D. C. Cox, “Robust frequency and timing synchroniza- tion for OFDM,”IEEE Trans. Commun., vol. 45, no. 12, pp. 1613–1621, Dec. 1997
1997
-
[19]
A robust timing and frequency synchronization for OFDM systems,
H. Minn, V . K. Bhargava, and K. B. Letaief, “A robust timing and frequency synchronization for OFDM systems,”IEEE Trans. Wireless Commun., vol. 2, no. 4, pp. 822–839, Jul. 2003
2003
-
[20]
Sparse Bayesian learning and the relevance vector machine,
M. E. Tipping, “Sparse Bayesian learning and the relevance vector machine,”J. Mach. Learn. Res., vol. 1, pp. 211–244, Jun. 2001
2001
-
[21]
Sparse Bayesian learning for basis selection,
D. P. Wipf and B. D. Rao, “Sparse Bayesian learning for basis selection,” IEEE Trans. Signal Process., vol. 52, no. 8, pp. 2153–2164, Aug. 2004
2004
-
[22]
QuaDRiGa: A 3-D multi-cell channel model with time evolution for enabling virtual field trials,
S. Jaeckel, L. Raschkowski, K. Börner, and L. Thiele, “QuaDRiGa: A 3-D multi-cell channel model with time evolution for enabling virtual field trials,”IEEE Trans. Antennas Propag., vol. 62, no. 6, pp. 3242–3256, Jun. 2014
2014
-
[23]
Study on channel model for frequencies from 0.5 to 100 GHz,
3GPP, “Study on channel model for frequencies from 0.5 to 100 GHz,” 3GPP TR 38.901, ver. 19.2.0, Jan. 2026
2026
-
[24]
Support-vector networks,
C. Cortes and V . Vapnik, “Support-vector networks,”Mach. Learn., vol. 20, no. 3, pp. 273–297, Sep. 1995
1995
-
[25]
Solving multiclass learning problems via error-correcting output codes,
T. G. Dietterich and G. Bakiri, “Solving multiclass learning problems via error-correcting output codes,”J. Artif. Intell. Res., vol. 2, pp. 263–286, 1995
1995
-
[26]
Random forests,
L. Breiman, “Random forests,”Mach. Learn., vol. 45, no. 1, pp. 5–32, Oct. 2001
2001
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.