Flexible Distributed Particle Filtering for the Internet of Things via Aggregate Computing
Pith reviewed 2026-06-26 22:16 UTC · model grok-4.3
The pith
Distributed particle filtering can be recast as computational fields to separate estimation logic from coordination strategies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
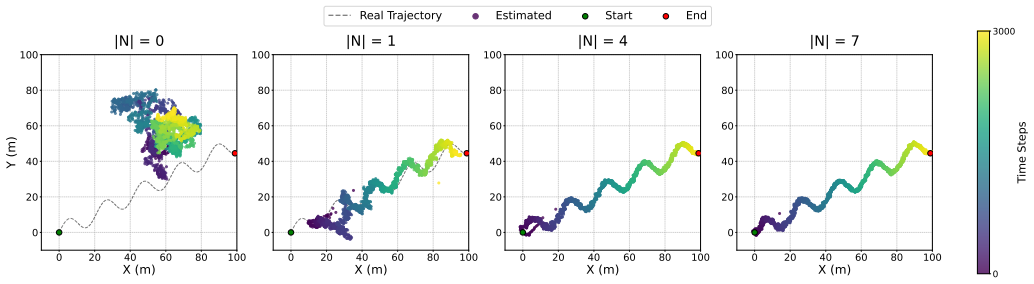
By expressing estimation and information dissemination as computational fields, our approach decouples the core filtering logic from coordination and data-flow strategies. This enables systematic customisation of key design dimensions, including fusion-center placement and resilience, aggregated measurement functions, as well as the type and scope of information propagation.
What carries the argument
Computational fields from aggregate computing that represent both the particle-filter estimation steps and the dissemination of measurements or particles.
If this is right
- Diverse DPF configurations can be derived within a single unified framework.
- Trade-offs among accuracy, communication cost, and robustness become directly comparable by varying field definitions.
- The same abstraction supports adaptable DPF solutions across open and heterogeneous IoT environments.
Where Pith is reading between the lines
- If the field abstraction works, it may let particle filtering be combined with other aggregate-computing services on the same IoT nodes without rewriting coordination code.
- The approach could be tested by measuring how field evaluation overhead scales when the number of particles or network size increases on embedded devices.
- Dynamic field reconfiguration might allow the filter to adapt its fusion strategy in response to changing network density or link quality.
Load-bearing premise
The assumption that recasting DPF operations as aggregate-computing fields preserves statistical correctness and convergence properties of the underlying particle filter.
What would settle it
Run the same set of particle-filter equations and network topology once with a conventional DPF implementation and once with the field-based version; the state estimates or particle weight distributions must match within sampling variance.
Figures
read the original abstract
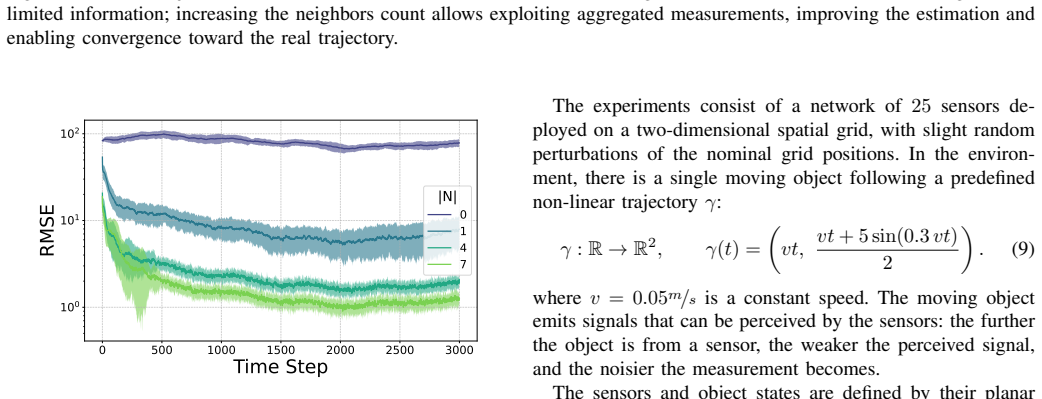
State estimation from uncertain, distributed observations is central in many cyber-physical applications. While Distributed Particle Filtering (DPF) algorithms address nonlinear and non-Gaussian estimations in distributed settings, most solutions remain tied to specific architectures and communication assumptions, limiting adaptability in open, heterogeneous deployments-most notably, the Internet of Things (IoT). In this paper, we propose a field-based formulation of Distributed Particle Filtering grounded in Aggregate Computing (AC). By expressing estimation and information dissemination as computational fields, our approach decouples the core filtering logic from coordination and data-flow strategies. This enables systematic customisation of key design dimensions, including fusion-center placement and resilience, aggregated measurement functions, as well as the type and scope of information propagation. Through a set of in-silico experiments, we show how diverse DPF configurations can be derived within a unified framework, highlighting trade-offs among accuracy, communication cost, and robustness. Overall, the proposed approach positions AC as an effective abstraction layer for engineering adaptable DPF solutions in open IoT environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a field-based formulation of Distributed Particle Filtering (DPF) grounded in Aggregate Computing (AC). By expressing estimation and information dissemination as computational fields, the approach decouples core filtering logic from coordination and data-flow strategies. This enables systematic customization of fusion-center placement, resilience, aggregated measurement functions, and information propagation. In-silico experiments demonstrate diverse DPF configurations within a unified framework and highlight trade-offs among accuracy, communication cost, and robustness, positioning AC as an abstraction layer for adaptable DPF in open IoT environments.
Significance. If the statistical equivalence to standard DPF holds, the work would offer a valuable abstraction for engineering flexible DPF solutions in heterogeneous IoT settings, where traditional DPF approaches are architecture-specific. The decoupling claim and experimental trade-off analysis could support reproducible design exploration, though the absence of an explicit invariance argument limits immediate impact.
major comments (2)
- [Abstract and Section 3 (field definitions)] The central claim requires that recasting DPF operations as AC fields leaves Bayesian updates, importance weighting, and resampling statistically unchanged. No equivalence argument or invariant is supplied showing that field operators produce identical per-particle quantities (weights, normalization, effective sample size) as centralized or gossip-based DPF; any deviation in aggregation or convergence would bias the posterior.
- [Section 4 and experimental evaluation] Section 4 (derived configurations) and the experimental section must demonstrate that the reported accuracy/communication/robustness trade-offs arise from the same underlying particle filter rather than from altered resampling or weighting semantics. Without this, the customization benefits cannot be isolated from potential statistical side-effects.
minor comments (2)
- [Abstract] The abstract refers to 'in-silico experiments' but provides no detail on particle count, network topology, or baseline DPF implementations used for comparison.
- [Section 2] Notation for field operators and their mapping to standard DPF steps (e.g., how aggregate measurement functions relate to likelihood evaluation) should be introduced earlier for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the two major comments point by point below, agreeing that an explicit statistical equivalence argument is needed to support the central claims.
read point-by-point responses
-
Referee: [Abstract and Section 3 (field definitions)] The central claim requires that recasting DPF operations as AC fields leaves Bayesian updates, importance weighting, and resampling statistically unchanged. No equivalence argument or invariant is supplied showing that field operators produce identical per-particle quantities (weights, normalization, effective sample size) as centralized or gossip-based DPF; any deviation in aggregation or convergence would bias the posterior.
Authors: We agree that the manuscript would benefit from an explicit invariance argument. The field-based formulation maps each DPF operation (prediction, measurement update, importance weighting, normalization, and resampling) directly onto field computations that are designed to produce identical per-particle quantities when fields converge correctly. However, we acknowledge the absence of a formal proof of statistical equivalence in the current version. We will add a new subsection in Section 3 that provides this argument, demonstrating that the field operators preserve the same weights, normalization constants, and effective sample size as standard DPF under the assumption of accurate field aggregation. revision: yes
-
Referee: [Section 4 and experimental evaluation] Section 4 (derived configurations) and the experimental section must demonstrate that the reported accuracy/communication/robustness trade-offs arise from the same underlying particle filter rather than from altered resampling or weighting semantics. Without this, the customization benefits cannot be isolated from potential statistical side-effects.
Authors: The reported trade-offs are intended to stem solely from variations in coordination and information propagation (expressed as fields), while the core filtering logic remains fixed. To make this explicit, we will revise Section 4 to include a clear statement that all configurations use identical prediction, update, weighting, and resampling steps. We will also add a short verification subsection in the experimental evaluation confirming that, for equivalent information availability, the particle weights and resulting posteriors match those produced by a centralized or gossip-based DPF implementation. revision: yes
Circularity Check
No circularity detected in derivation
full rationale
The manuscript presents a field-based reformulation of distributed particle filtering via aggregate computing as an engineering abstraction that decouples core filtering from coordination. No equations, parameter fits, or self-citations are exhibited that would reduce any claimed preservation of statistical properties, decoupling benefit, or derived configuration to the inputs by construction. The central premise is an unproven modeling assumption about invariance under field operators, which is a correctness gap rather than a definitional loop or self-referential prediction. The derivation chain therefore remains self-contained as a proposal of new design dimensions supported by experiments.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Distributed particle filtering in agent networks: A survey, classification, and comparison,
O. Hlinka, F. Hlawatsch, and P. M. Djuric, “Distributed particle filtering in agent networks: A survey, classification, and comparison,”IEEE Signal Process. Mag., vol. 30, no. 1, pp. 61–81, 2013
2013
-
[2]
A tutorial on particle filters for online nonlinear/non-gaussian bayesian tracking,
M. S. Arulampalam, S. Maskell, N. J. Gordon, and T. Clapp, “A tutorial on particle filters for online nonlinear/non-gaussian bayesian tracking,” IEEE Trans. Signal Process., vol. 50, no. 2, pp. 174–188, 2002
2002
-
[3]
Aggregate programming for the internet of things,
J. Beal, D. Pianini, and M. Viroli, “Aggregate programming for the internet of things,”Computer, vol. 48, no. 9, pp. 22–30, 2015
2015
-
[4]
Macroprogramming: Concepts, state of the art, and op- portunities of macroscopic behaviour modelling,
R. Casadei, “Macroprogramming: Concepts, state of the art, and op- portunities of macroscopic behaviour modelling,”ACM Comput. Surv., vol. 55, no. 13s, pp. 275:1–275:37, 2023
2023
-
[5]
A higher- order calculus of computational fields,
G. Audrito, M. Viroli, F. Damiani, D. Pianini, and J. Beal, “A higher- order calculus of computational fields,”ACM Trans. Comput. Log., vol. 20, no. 1, pp. 5:1–5:55, 2019
2019
-
[6]
Co-fields: A physically inspired approach to motion coordination,
M. Mamei, F. Zambonelli, and L. Leonardi, “Co-fields: A physically inspired approach to motion coordination,”IEEE Pervasive Comput., vol. 3, no. 2, pp. 52–61, 2004
2004
-
[7]
A new approach to linear filtering and prediction problems,
R. E. Kalman, “A new approach to linear filtering and prediction problems,”J. Basic Eng., vol. 82, no. 1, p. 35–45, 1960
1960
-
[8]
From distributed coordination to field calculus and aggregate comput- ing,
M. Viroli, J. Beal, F. Damiani, G. Audrito, R. Casadei, and D. Pianini, “From distributed coordination to field calculus and aggregate comput- ing,”J. Log. Algebraic Methods Program., vol. 109, 2019
2019
-
[9]
Computation against a neighbour: Addressing large-scale distribution and adaptivity with functional programming and scala,
G. Audrito, R. Casadei, F. Damiani, and M. Viroli, “Computation against a neighbour: Addressing large-scale distribution and adaptivity with functional programming and scala,”Log. Methods Comput. Sci., vol. 19, no. 1, 2023
2023
-
[10]
Engineering resilient collective adaptive systems by self-stabilisation,
M. Viroli, G. Audrito, J. Beal, F. Damiani, and D. Pianini, “Engineering resilient collective adaptive systems by self-stabilisation,”ACM Trans. Model. Comput. Simul., vol. 28, no. 2, pp. 16:1–16:28, 2018
2018
-
[11]
Designing self-organising emergent systems based on information flows and feedback-loops,
T. D. Wolf and T. Holvoet, “Designing self-organising emergent systems based on information flows and feedback-loops,” in1st International Conference on Self-Adaptive and Self-Organizing Systems, SASO. IEEE Computer Society, 2007, pp. 295–298
2007
-
[12]
Self-stabilising priority-based multi-leader election and network partitioning,
D. Pianini, R. Casadei, and M. Viroli, “Self-stabilising priority-based multi-leader election and network partitioning,” inIEEE International Conference on Autonomic Computing and Self-Organizing Systems, ACSOS’22. IEEE, 2022, pp. 81–90
2022
-
[13]
Self-stabilizing systems in spite of distributed control,
E. W. Dijkstra, “Self-stabilizing systems in spite of distributed control,” Commun. ACM, vol. 17, no. 11, pp. 643–644, 1974
1974
-
[14]
The exchange calculus (XC): A functional programming language design for distributed collective systems,
G. Audrito, R. Casadei, F. Damiani, G. Salvaneschi, and M. Viroli, “The exchange calculus (XC): A functional programming language design for distributed collective systems,”J. Syst. Softw., vol. 210, p. 111976, 2024
2024
-
[15]
Protelis: practical aggregate program- ming,
D. Pianini, M. Viroli, and J. Beal, “Protelis: practical aggregate program- ming,” inProceedings of the 30th Annual ACM Symposium on Applied Computing. ACM, 2015, pp. 1846–1853
2015
-
[16]
FCPP to aggregate them all,
G. Audrito and G. Torta, “FCPP to aggregate them all,”Sci. Comput. Program., vol. 231, p. 103026, 2024
2024
-
[17]
Multiplatform self-organizing systems through a Kotlin- MP implementation of aggregate computing,
A. Cortecchia, “Multiplatform self-organizing systems through a Kotlin- MP implementation of aggregate computing,” inIEEE International Conference on Autonomic Computing and Self-Organizing Systems, ACSOS’2024 - Companion. IEEE, 2024, pp. 155–157
2024
-
[18]
Distributed Kalman filter with embedded consensus filters,
R. Olfati-Saber, “Distributed Kalman filter with embedded consensus filters,” in44th IEEE Conference on Decision and Control & 8th European Control Conference Control. IEEE, 2005, pp. 8179–8184
2005
-
[19]
Diffusion strategies for distributed kalman filtering and smoothing,
F. S. Cattivelli and A. H. Sayed, “Diffusion strategies for distributed kalman filtering and smoothing,”IEEE Trans. Autom. Control., vol. 55, no. 9, pp. 2069–2084, 2010
2069
-
[20]
Likeli- hood consensus and its application to distributed particle filtering,
O. Hlinka, O. Sluciak, F. Hlawatsch, P. M. Djuric, and M. Rupp, “Likeli- hood consensus and its application to distributed particle filtering,”IEEE Trans. Signal Process., vol. 60, no. 8, pp. 4334–4349, 2012
2012
-
[21]
Consensus-based distributed particle filtering with distributed proposal adaptation,
O. Hlinka, F. Hlawatsch, and P. M. Djuric, “Consensus-based distributed particle filtering with distributed proposal adaptation,”IEEE Trans. Signal Process., vol. 62, no. 12, pp. 3029–3041, 2014
2014
-
[22]
Near-optimal knowledge- free resilient leader election,
Y . Mo, G. Audrito, S. Dasgupta, and J. Beal, “Near-optimal knowledge- free resilient leader election,”Autom., vol. 146, p. 110583, 2022
2022
-
[23]
Decentralized sensor fusion with distributed particle filters,
M. Rosencrantz, G. J. Gordon, and S. Thrun, “Decentralized sensor fusion with distributed particle filters,” in19th Conference in Uncertainty in Artificial Intelligence. Morgan Kaufmann, 2003, pp. 493–500
2003
-
[24]
Distributed particle filters for sensor networks,
M. Coates, “Distributed particle filters for sensor networks,” in3rd International Symposium on Information Processing in Sensor Networks, IPSN’04, Proceedings. ACM, 2004, pp. 99–107
2004
-
[25]
Cooperative parameter estimation on the unit sphere using a network of diffusion particle filters,
C. G. de Figueredo, C. J. B. Jr., and M. G. S. Bruno, “Cooperative parameter estimation on the unit sphere using a network of diffusion particle filters,”IEEE Signal Process. Lett., vol. 27, pp. 715–719, 2020
2020
-
[26]
Partitioned integration and coordination via the self-organising coordination regions pattern,
D. Pianini, R. Casadei, M. Viroli, and A. Natali, “Partitioned integration and coordination via the self-organising coordination regions pattern,” Future Gener. Comput. Syst., vol. 114, pp. 44–68, 2021
2021
-
[27]
Space- fluid adaptive sampling by self-organisation,
R. Casadei, S. Mariani, D. Pianini, M. Viroli, and F. Zambonelli, “Space- fluid adaptive sampling by self-organisation,”Log. Methods Comput. Sci., vol. 19, no. 4, 2023
2023
-
[28]
Chemical-oriented simulation of computational systems with alchemist,
D. Pianini, S. Montagna, and M. Viroli, “Chemical-oriented simulation of computational systems with alchemist,”Journal of Simulation, vol. 7, no. 3, pp. 202–215, Aug. 2013
2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.