Modeling of Spinning Plates: Geometric Stiffening and Modal Approximation for GNC Applications
Pith reviewed 2026-06-27 15:48 UTC · model grok-4.3
The pith
A modal model for spinning plates captures geometric stiffening effects nonlinearly in angular velocity for spacecraft control.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The model is linearized with respect to elastic deformations while retaining the full dependence on spacecraft angular velocities and accelerations. System matrices depend nonlinearly on spacecraft states through squared and cross-product terms, capturing gyroscopic coupling and dynamic stiffening phenomena for arbitrary rotational maneuvers. Polynomial approximation of mode shapes enables efficient computation while preserving accuracy.
What carries the argument
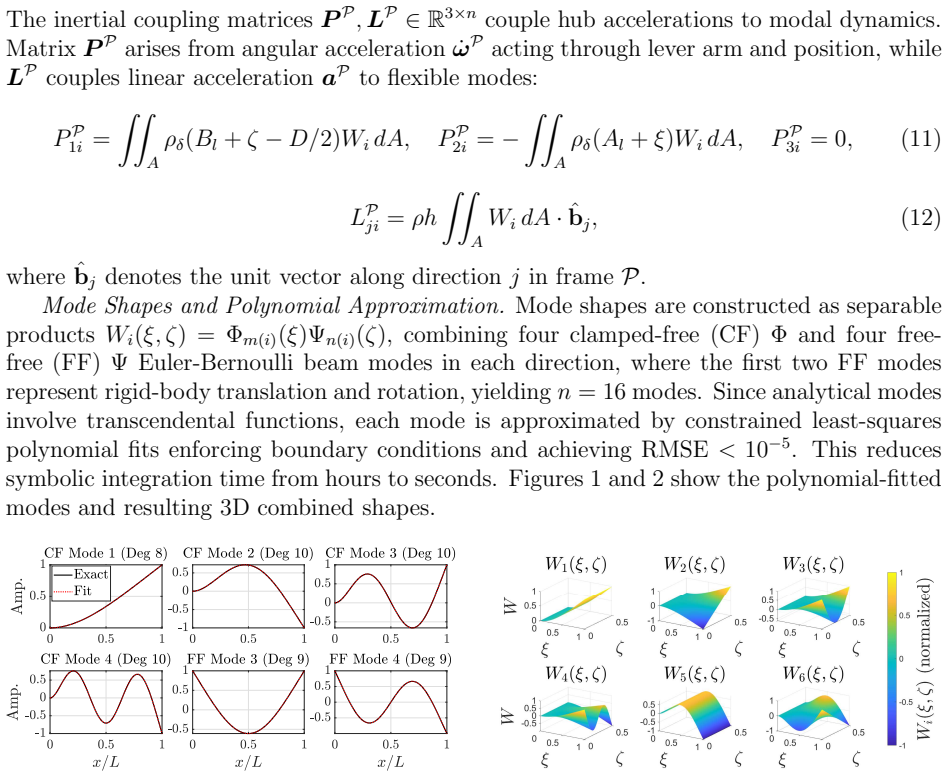
Modal formulation for rectangular plates incorporating in-plane foreshortening and centrifugal stiffening effects, using polynomial approximation of mode shapes.
If this is right
- System matrices can be computed efficiently for any rotational maneuver.
- Gyroscopic coupling and dynamic stiffening are accounted for in the dynamics.
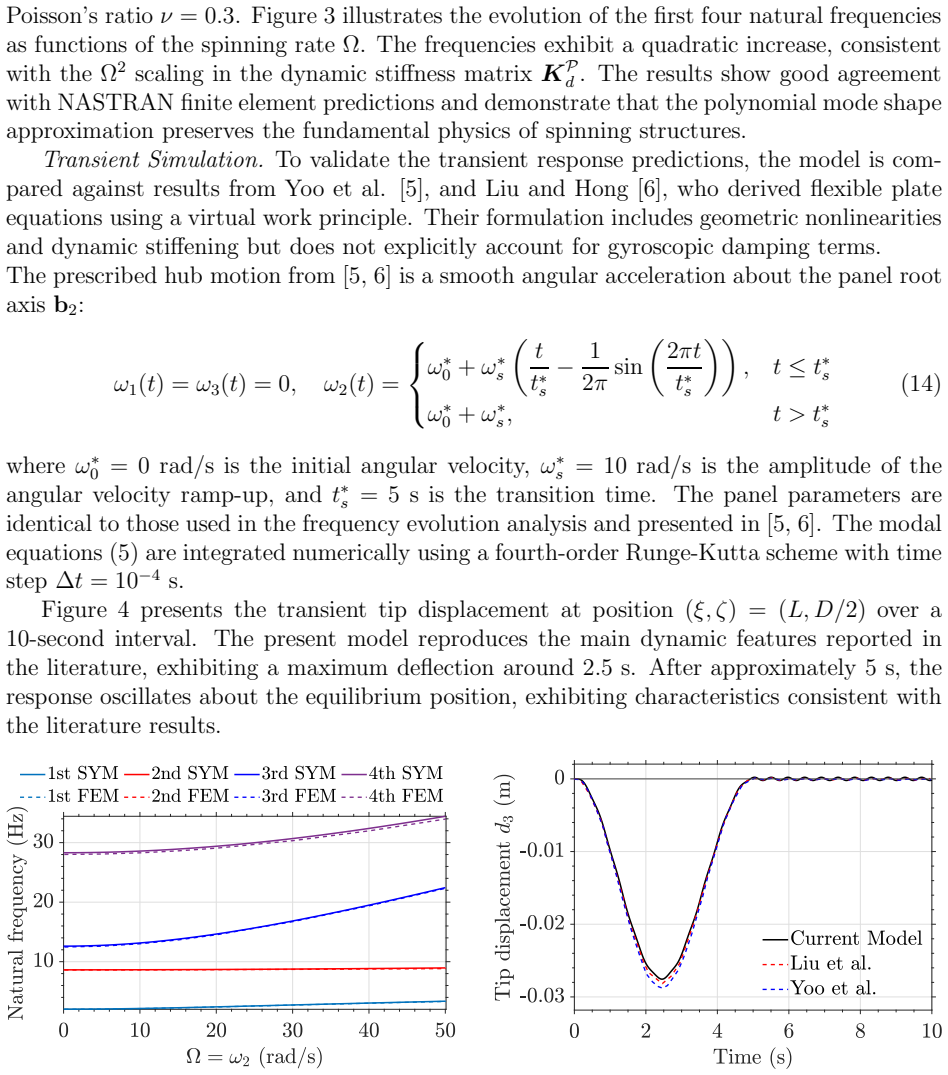
- Transient response predictions match finite element results for prescribed motions.
- The approach supports GNC applications in spacecraft with flexible plates.
Where Pith is reading between the lines
- This modeling approach may extend to other flexible structures like beams or shells in rotating systems.
- It could lead to improved stability margins in control laws for spinning spacecraft.
- Validation under more complex multi-axis rotations would strengthen applicability.
Load-bearing premise
The polynomial approximation of mode shapes preserves sufficient accuracy for GNC applications under arbitrary rotational maneuvers.
What would settle it
If the predicted transient response under a prescribed high-speed hub rotation deviates significantly from finite element simulation results or experimental data, the model's accuracy for capturing stiffening effects would be falsified.
Figures
read the original abstract
This work presents a modal formulation for flexible rectangular plates, accounting for nonlinear geometric effects arising from in-plane foreshortening and centrifugal stiffening. The model is linearized with respect to elastic deformations while retaining the full dependence on spacecraft angular velocities and accelerations. System matrices depend nonlinearly on spacecraft states through squared and cross-product terms, capturing gyroscopic coupling and dynamic stiffening phenomena for arbitrary rotational maneuvers. Polynomial approximation of mode shapes enables efficient computation while preserving accuracy. Model predictions are validated against finite element simulations and literature data for transient response under prescribed hub motion.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a modal formulation for flexible rectangular plates on spinning spacecraft, incorporating nonlinear geometric effects from in-plane foreshortening and centrifugal stiffening. The model is linearized with respect to elastic deformations while retaining full nonlinear dependence on spacecraft angular velocities and accelerations through squared and cross-product terms in the system matrices. Polynomial mode-shape approximations are used for efficiency, and predictions are validated against FEM simulations and literature for transient response under prescribed hub motion.
Significance. If the retained nonlinear terms prove accurate, the formulation would provide an efficient, mechanics-derived approach for modeling gyroscopic coupling and dynamic stiffening in GNC applications involving flexible spinning components, avoiding the computational cost of full FEM while preserving key state-dependent effects.
major comments (1)
- [Abstract] Abstract: The central claim that the model captures gyroscopic coupling and dynamic stiffening phenomena for arbitrary rotational maneuvers is not supported by the reported validation, which is restricted to transient response under prescribed hub motion. This imposed-motion setup does not exercise the full nonlinear dependence on freely varying spacecraft states that would arise in coupled rigid-elastic dynamics or closed-loop GNC.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive feedback on our manuscript. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the model captures gyroscopic coupling and dynamic stiffening phenomena for arbitrary rotational maneuvers is not supported by the reported validation, which is restricted to transient response under prescribed hub motion. This imposed-motion setup does not exercise the full nonlinear dependence on freely varying spacecraft states that would arise in coupled rigid-elastic dynamics or closed-loop GNC.
Authors: We agree that the reported validation exercises the nonlinear state-dependent matrices only under one-way prescribed hub motion and does not demonstrate two-way coupling in which elastic deformations alter the rigid-body trajectory. The derivation itself retains the complete nonlinear dependence on angular velocity and acceleration (including all squared and cross-product terms) so that the same matrices apply without modification to any time history of spacecraft states, whether prescribed or obtained from coupled integration. The chosen validation cases do exercise these terms for a range of arbitrary rotational profiles. Nevertheless, to avoid any overstatement of what the numerical results directly confirm, we will revise the abstract to state that the formulation captures gyroscopic coupling and dynamic stiffening in the elastic dynamics under prescribed rotational maneuvers, while noting that the structure is suitable for subsequent use in coupled GNC simulations. This is a wording clarification; the technical content and validation remain unchanged. revision: yes
Circularity Check
No circularity: derivation from mechanics with external validation
full rationale
The paper presents a modal formulation derived from standard flexible-body mechanics, with linearization in elastic deformations but retained nonlinear dependence on angular velocity/acceleration states via squared and cross-product terms. Validation is performed against independent finite-element simulations and external literature data under prescribed motion. No self-definitional equations, no fitted parameters renamed as predictions, and no load-bearing self-citations appear in the derivation chain. The model is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Shabana, A. A. , title =. Multibody Syst. Dyn. , volume =
-
[2]
and Hong, J
Liu, J. and Hong, J. , title =. Acta Mech. Sin. , volume =
-
[3]
and Baozeng, Y
Feng, L. and Baozeng, Y. and Banerjee, A. K. , title =. J. Guid. Control Dyn. , volume =
-
[4]
and Alazard, D
Rodrigues, R. and Alazard, D. and Sanfedino, F. and Mauriello, T. and Iannelli, P. , title =. Appl. Math. Model. , year =
-
[5]
and Hong, J
Liu, J. and Hong, J. , title =. Mech. Res. Commun. , volume =
-
[6]
and Gupta, S
Hoskoti, L. and Gupta, S. S. and Sucheendran, M. M. , title =. J. Sound Vib. , volume =
-
[7]
Yoo, H. H. and Chung, J. , title =. J. Sound Vib. , volume =
-
[8]
and Perez, J
Alazard, D. and Perez, J. A. and Cumer, C. and Loquen, T. , year =. Two-Input Two-Output Port Model for Mechanical Systems , doi =. AIAA Guidance, Navigation, and Control Conference , publisher =
-
[9]
Murali, H. H. S. and Alazard, D. and Massotti, L. and Ankersen, F. and Toglia, C. , editor =. Mechanical-Attitude Controller Co-Design of Large Flexible Space Structures , doi =. Advances in Aerospace Guidance, Navigation and Control , publisher =. 2015 , pages =
2015
-
[10]
Perez, J. A. and Alazard, D. and Loquen, T. and Pittet, C. and Cumer, C. , year =. Flexible Multibody System Linear Modeling for Control Using Component Modes Synthesis and Double-Port Approach , volume =. doi:10.1115/1.4034149 , journal =
-
[11]
Sanfedino, F. and Alazard, D. and Pommier-Budinger, V. and Falcoz, A. and Boquet, F. , year =. Finite Element Based N-Port Model for Preliminary Design of Multibody Systems , volume =. doi:10.1016/j.jsv.2017.11.021 , journal =
-
[12]
Linear Parameter-Varying Gain-Scheduled Attitude Controller for an On-Orbit Servicing Mission Involving Flexible Large Spacecraft and Fuel Sloshing , author =
-
[13]
and Jiazhen, H
Jinyang, L. and Jiazhen, H. , title =. Mechanics Research Communications , number =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.