A Hybrid Optimization Framework for Spatial Packaging of Interconnected Systems
Pith reviewed 2026-05-19 22:42 UTC · model grok-4.3
The pith
A hybrid optimization framework for spatial packaging of interconnected systems achieves over 10% improvement and 0.6-2% accuracy to analytical optima.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The proposed framework integrates the Maximal Disjoint Ball Decomposition for geometric abstraction with a hybrid optimization strategy that combines stochastic initialization and gradient-based refinement with interior point optimization. It is formulated to handle the nonlinear, non-convex, and continuous characteristics of spatially coupled design problems, achieving more than a 10% improvement over existing SPI2 implementations and converging to spatially analytical optima with 0.6-2% accuracy.
What carries the argument
Hybrid optimization strategy that combines stochastic initialization and gradient-based refinement with interior point optimization, supported by Maximal Disjoint Ball Decomposition for geometric abstraction.
If this is right
- The method handles nonlinear, non-convex, and continuous characteristics of spatially coupled design problems.
- It achieves more than a 10% improvement over existing SPI2 implementations.
- It converges to spatially analytical optima across various benchmark scenarios.
- Benchmark experiments show solution accuracy of 0.6-2% relative to the ground truth.
Where Pith is reading between the lines
- Re-integrating physical interactions into this spatial optimizer could show trade-offs between geometry and other system properties.
- The new benchmark for verifiable assessment could become a standard for testing spatial packaging algorithms.
- Applying the framework to additional use cases beyond the tested ones might uncover limitations in real-world interconnected systems.
Load-bearing premise
Isolating the spatial optimization aspect from physical interactions allows independent and meaningful evaluation of placement and routing performance.
What would settle it
Running the method on the new benchmark and finding no improvement over 10% or accuracy outside the 0.6-2% range relative to ground truth would indicate the claims do not hold.
Figures
















read the original abstract
This paper presents an optimization framework for Spatial Packaging of Interconnected Systems with Physical Interactions (SPI2) that addresses the geometric challenges of three-dimensional component placement and routing. While SPI2 generally includes physical interactions, this study isolates the spatial optimization aspect to evaluate placement and routing performance independently. The framework integrates the Maximal Disjoint Ball Decomposition (MDBD) for geometric abstraction with a hybrid optimization strategy that combines stochastic initialization and gradient-based refinement with interior point optimization. It is formulated to handle the nonlinear, non-convex, and continuous characteristics of spatially coupled design problems. The proposed framework is evaluated against a use case from prior SPI2 research and tested with a newly introduced benchmark that enables verifiable assessment of optimization performance. Results indicate that the presented method achieves more than a 10% improvement over existing SPI2 implementations and converges to spatially analytical optima across various benchmark scenarios. Benchmark experiments show solution accuracy of 0.6-2% relative to the ground truth.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a hybrid optimization framework for Spatial Packaging of Interconnected Systems with Physical Interactions (SPI2), isolating the spatial optimization aspect from physical interactions. It combines Maximal Disjoint Ball Decomposition (MDBD) for geometric abstraction with a hybrid strategy of stochastic initialization and gradient-based refinement using interior-point optimization. The approach is evaluated on a prior SPI2 use case and a newly introduced benchmark, claiming more than 10% improvement over existing implementations, convergence to spatially analytical optima, and solution accuracy of 0.6-2% relative to ground truth.
Significance. If validated, the framework could advance practical tools for 3D component placement and routing in engineering design by addressing non-convex spatial coupling. The introduction of a verifiable benchmark is a constructive step toward reproducible assessment. However, the overall significance is constrained by the high-level presentation of results without supporting derivations or robustness checks.
major comments (3)
- [Abstract] Abstract: The central performance claims (>10% improvement, 0.6-2% accuracy, convergence to analytical optima) rest on high-level descriptions only, with no detailed derivations, error analysis, or data tables provided to support the quantitative figures.
- [Benchmark experiments] Benchmark experiments: The accuracy figures relative to ground truth are reported without variance across restarts, sensitivity analysis to initialization, or comparisons against a global solver on the same instances, leaving open the possibility that results reflect favorable test selection rather than consistent global optimality in non-convex landscapes.
- [Hybrid optimization strategy] Hybrid optimization strategy: The description of stochastic initialization plus interior-point refinement does not include formal convergence analysis or exhaustive verification, which is load-bearing for the claim that the method reliably reaches spatially analytical optima.
minor comments (2)
- [Method] Clarify the precise formulation of the MDBD abstraction and how it interfaces with the continuous optimization variables.
- [Benchmark] Add explicit statements on the dimensionality and coupling structure of the new benchmark cases to allow readers to judge generalizability.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive review of our manuscript. We address each major comment point by point below, indicating where we agree revisions are warranted and providing our honest assessment of the claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central performance claims (>10% improvement, 0.6-2% accuracy, convergence to analytical optima) rest on high-level descriptions only, with no detailed derivations, error analysis, or data tables provided to support the quantitative figures.
Authors: The abstract is by design a concise summary. The manuscript body contains the benchmark setup, optimization results, and comparisons that support the reported figures. To improve clarity, we will add a dedicated results table with the quantitative metrics, a brief error analysis summary, and explicit cross-references from the abstract to the supporting sections in the revised version. revision: yes
-
Referee: [Benchmark experiments] Benchmark experiments: The accuracy figures relative to ground truth are reported without variance across restarts, sensitivity analysis to initialization, or comparisons against a global solver on the same instances, leaving open the possibility that results reflect favorable test selection rather than consistent global optimality in non-convex landscapes.
Authors: We agree that additional robustness checks would strengthen the presentation. The revised manuscript will report results from multiple restarts including variance, and will include sensitivity analysis to initialization. Direct comparison against a global solver is feasible only on the smallest instances due to computational cost on larger non-convex problems; we will add such comparisons for the verifiable benchmark cases to address the concern. revision: partial
-
Referee: [Hybrid optimization strategy] Hybrid optimization strategy: The description of stochastic initialization plus interior-point refinement does not include formal convergence analysis or exhaustive verification, which is load-bearing for the claim that the method reliably reaches spatially analytical optima.
Authors: The hybrid strategy is presented as an empirical method that combines stochastic exploration with local refinement. Formal convergence guarantees are difficult to obtain for general non-convex spatial problems of this type. The manuscript relies on empirical verification through the new benchmark that permits comparison to analytical ground truth. We will expand the discussion section to include more detail on the verification procedure and the observed convergence behavior across the test cases. revision: partial
Circularity Check
No significant circularity detected in derivation or claims
full rationale
The paper describes a hybrid optimization framework combining MDBD geometric abstraction with stochastic initialization plus interior-point gradient refinement for isolated spatial SPI2 problems. Central results (10%+ improvement, 0.6-2% accuracy to ground truth, convergence to analytical optima) are obtained by direct comparison to external prior SPI2 implementations and a newly introduced benchmark with verifiable ground truth. No equations or steps reduce by construction to the method's own inputs; no fitted parameters are relabeled as predictions; no load-bearing self-citations or uniqueness theorems imported from the authors' prior work appear in the provided text. The evaluation is externally benchmarked rather than self-referential.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Y. Haga, T. Matsunaga, T. Kobayashi, and N. Tsuruoka, ‘Min- imally Invasive Medical Devices and Healthcare Devices Using Microfabrication Technology’, in Advanced Mechatronics and MEMS Devices II, D. Zhang and B. Wei, Eds., in Microsystems and Nanosystems. , Cham: Springer International Publishing, 2017, pp. 329–340. doi: 10.1007/978-3-319-32180-6 15
-
[2]
D. V. Kladko and V. V. Vinogradov, ‘Magnetosurgery: Princi- ples, design, and applications’, Smart Materials in Medicine, vol. 5, no. 1, pp. 24–35, Mar. 2024, doi: 10.1016/j.smaim.2023.06.008
-
[3]
J. Van Kampen, M. Salazar, and T. Hofman, ‘A Two-dimensional Spatial Optimization Framework for Vehicle Powertrain Sys- tems’, in 2023 IEEE Vehicle Power and Propulsion Confer- ence (VPPC), Milan, Italy: IEEE, Oct. 2023, pp. 1–6. doi: 10.1109/VPPC60535.2023.10403195
-
[4]
M. Hofstetter, M. Hirz, M. Gintzel, and A. Schmidhofer, ‘Multi- Objective System Design Synthesis for Electric Powertrain De- velopment’, in 2018 IEEE Transportation Electrification Confer- ence and Expo (ITEC), Long Beach, CA: IEEE, Jun. 2018, pp. 286–292. doi: 10.1109/ITEC.2018.8450113
-
[5]
R. Cheng, Z. Zhang, L. Jia, X. Zhang, and L. Yang, ‘Com- ponent matching optimization of high-performance turbofan engine based on experiment test and adaptive performance model to control the average gas temperature’, Propulsion and Power Research, vol. 14, no. 1, pp. 1–13, Mar. 2025, doi: 10.1016/j.jppr.2025.02.001
-
[6]
Howard, C., 2010, “Avionics and Military Electronics Thermal Management Challenges are Sparking Innovative Solutions to Keep These Systems Cool,” Military Aerospace Magazine
work page 2010
-
[7]
Howard, C., 2011, “Power and Thermal Management Considera- tions Move to the Forefront of Aerospace and Defense Electronic Systems,” Military Aerospace Magazine
work page 2011
-
[8]
O. Borsboom, M. Salazar, and T. Hofman, ‘Design Optimization of Electric Vehicle Drivetrains Using Surrogate Modeling Frame- works’, IEEE Open J. Veh. Technol., vol. 6, pp. 2776–2788, 2025, doi: 10.1109/OJVT.2025.3616195
-
[9]
S. R. T. Peddada, L. E. Zeidner, K. A. James, and J. T. Allison, “An Introduction to 3D SPI2 (Spatial Packaging of Intercon- nected Systems With Physics Interactions) Design Problems: A Review of Related Work, Existing Gaps, Challenges, and Oppor- tunities,” in *Volume 3B: 47th Design Automation Conference (DAC)*, Virtual, Online: American Society of Mech...
-
[10]
Spatial Packaging and Routing Optimization of Complex Interacting Engineered Systems,
M. M. Behzadi, P. Zaffetti, J. Chen, L. E. Zeidner, and H. T. Ilie¸ s, “Spatial Packaging and Routing Optimization of Complex Interacting Engineered Systems,” Journal of Mechanical Design, vol. 147, no. 7, p. 071704, July 2025, doi: 10.1115/1.4067427
-
[11]
R. Guirardello and R. E. Swaney, ‘Optimization of pro- cess plant layout with pipe routing’, Computers & Chemi- cal Engineering, vol. 30, no. 1, pp. 99–114, Nov. 2005, doi: 10.1016/j.compchemeng.2005.08.009
-
[12]
Natsuko Yano, Takashi Morinaga, and Tsutomu Saito, ‘Packing optimization for cargo containers’, in 2008 SICE Annual Con- ference, Chofu, Japan: IEEE, Aug. 2008, pp. 3479–3482. doi: 10.1109/SICE.2008.4655264
- [13]
-
[14]
Available: https://en.wikipedia.org/wiki/STL (file format)
[Online]. Available: https://en.wikipedia.org/wiki/STL (file format)
-
[15]
Schneider, ‘NURB Curves: A Guide for the Uniniti- ated’, Develop, The Apple Technical Journal, no
Philip J. Schneider, ‘NURB Curves: A Guide for the Uniniti- ated’, Develop, The Apple Technical Journal, no. 25, p. 128, Mar. 1996
work page 1996
-
[17]
J. A. Norato, B. K. Bell, and D. A. Tortorelli, ‘A geometry projection method for continuum-based topology optimization with discrete elements’, Computer Methods in Applied Mechan- ics and Engineering, vol. 293, pp. 306–327, Aug. 2015, doi: 10.1016/j.cma.2015.05.005
-
[18]
J. Chen and H. T. Ilie¸ s, ‘Maximal Disjoint Ball Decompositions for shape modeling and analysis’, Computer-Aided Design, vol. 126, p. 102850, Sep. 2020, doi: 10.1016/j.cad.2020.102850
-
[19]
W. B. Bello et al., ‘Underhood Spatial Packing and Routing of an Automotive Fuel Cell System (AFCS) Using 2D Geometric Projection’, in AIAA SCITECH 2022 Forum, San Diego, CA & Virtual: American Institute of Aeronautics and Astronautics, Jan. 2022. doi: 10.2514/6.2022-0804
-
[20]
A. Jessee, S. R. T. Peddada, D. J. Lohan, J. T. Allison, and K. A. James, ‘Simultaneous Packing and Routing Optimization Using Geometric Projection’, Journal of Mechanical Design, vol. 142, no. 11, p. 111702, Nov. 2020, doi: 10.1115/1.4046809
-
[21]
S. R. T. Peddada, K. A. James, and J. T. Allison, ‘A Novel Two- Stage Design Framework for Two-Dimensional Spatial Packing of 16 Interconnected Components’, Journal of Mechanical Design, vol. 143, no. 3, p. 031706, Mar. 2021, doi: 10.1115/1.4048817
-
[23]
W. B. Bello, S. R. T. Peddada, A. Bhattacharyya, L. E. Zei- dner, J. T. Allison, and K. A. James, ‘Multi-Physics Three- Dimensional Component Placement and Routing Optimization Using Geometric Projection’, Journal of Mechanical Design, vol. 146, no. 8, p. 081702, Aug. 2024, doi: 10.1115/1.4064488
-
[24]
C. Parrott, S. Peddada, J. T. Allison, and K. James, ‘Ma- chine Learning Surrogates for Optimal 2D Spatial Packaging of Interconnected Systems with Physics Interactions (SPI2)’, in AIAA AVIATION 2023 Forum, San Diego, CA and Online: American Institute of Aeronautics and Astronautics, Jun. 2023. doi: 10.2514/6.2023-4375
-
[25]
S. R. T. Peddada, N. M. Dunfield, L. E. Zeidner, K. A. James, and J. T. Allison, ‘Systematic Enumeration and Iden- tification of Unique Spatial Topologies of 3D Systems Using Spatial Graph Representations’, in Volume 3A: 47th Design Automation Conference (DAC), Virtual, Online: American So- ciety of Mechanical Engineers, Aug. 2021, p. V03AT03A042. doi: 10...
-
[26]
Kyle Vu, ‘Computing Ball Insertion Sites for Maximal Disjoint Ball Decompositions’, Master Thesis, University of Connecticut, Storrs, CT, 2024. Accessed: Mar. 04, 2025. [Online]. Available: https://prod.ctda.dgicloud.com/node/3795011
-
[27]
Jiangce Chen, ‘Non-uniform Disjoint Ball Decomposition: For- mulations and Applications in Engineering Design’, Doctoral Thesis, University of Connecticut, Storrs, CT, 2023. Accessed: Jun. 04, 2025. [Online]. Available: https://archives.lib.uconn. edu/node/515065
work page 2023
-
[28]
S. R. T. Peddada, L. E. Zeidner, H. T. Ilie¸ s, K. A. James, and J. T. Allison, “Toward Holistic Design of Spatial Packaging of Interconnected Systems With Physical Interactions (SPI2),” *Journal of Mechanical Design*, vol. 144, no. 12, Aug. 2022. doi: 10.1115/1.4055055
-
[30]
A. Rosich, K. Berx, and G. Pinte, ‘Model-based design synthe- sis: application to optimal air-compressor system design**This work is partially granted by the IWT Agentschap voor Inno- vatie door Wetenschap en Technologie in the framework of the MBSE4Mechatronics project (ref. 130013). The authors grate- fully acknowledge the support. ’, IFAC-PapersOnLine,...
-
[31]
K. Svanberg, ‘The method of moving asymptotes—a new method for structural optimization’, Numerical Meth En- gineering, vol. 24, no. 2, pp. 359–373, Feb. 1987, doi: 10.1002/nme.1620240207
-
[32]
‘fmincon’ . mathworks, 2025. Accessed: Apr. 16, 2025. [Online]. Available: https://nl.mathworks.com/help/optim/ug/fmincon. html
work page 2025
-
[33]
D. P. Kingma and J. Ba, ‘Adam: A Method for Stochastic Optimization’, 2014, arXiv. doi: 10.48550/ARXIV.1412.6980
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1412.6980 2014
-
[34]
van de Wouw, Multibody and Nonlinear Dynamics, vol
N. van de Wouw, Multibody and Nonlinear Dynamics, vol. Lec- ture Notes for the part on Multibody Dynamics 2017. Semester 1, Quartile 2. 4DM10. Eindhoven: TU/e Dereumaux Printservice, 2016
work page 2017
-
[35]
Wikipedia, the free encyclopedia, ‘Smooth maximum’, Boltz- mann operator. Accessed: Aug. 10, 2025. [Online]. Available: https://en.wikipedia.org/wiki/Smooth maximum
work page 2025
-
[36]
CasADi — A software framework for nonlinear op- timization and optimal control,
J. A. E. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “CasADi — A software framework for nonlinear op- timization and optimal control,” Mathematical Programming Computation, 2018
work page 2018
-
[37]
R. M. Freund and S. Mizuno, ‘Interior Point Methods: Current Status and Future Directions’, in High Performance Optimiza- tion, vol. 33, H. Frenk, K. Roos, T. Terlaky, and S. Zhang, Eds., in Applied Optimization, vol. 33. , Boston, MA: Springer US, 2000, pp. 441–466. doi: 10.1007/978-1-4757-3216-0 18
-
[38]
S. Tosserams, L. F. P. Etman, P. Y. Papalambros, and J. E. Rooda, ‘An augmented Lagrangian relaxation for analytical target cascading using the alternating direction method of multi- pliers’, Struct Multidisc Optim, vol. 31, no. 3, pp. 176–189, Mar. 2006, doi: 10.1007/s00158-005-0579-0
-
[39]
P. Wang, W. Xu, H. Zhu, H. Tian, and G. Cai, ‘An Application of Analytical Target Cascading for a Hierarchical Multidisci- plinary System: The Preliminary Design of a Launch Vehicle Powered by Hybrid Rocket Motors’, Aerospace, vol. 9, no. 12, p. 778, Dec. 2022, doi: 10.3390/aerospace9120778
-
[40]
H. M. Kim, D. G. Rideout, P. Y. Papalambros, and J. L. Stein, ‘Analytical Target Cascading in Automotive Vehicle Design’, Journal of Mechanical Design, vol. 125, no. 3, pp. 481–489, Sep. 2003, doi: 10.1115/1.1586308
-
[41]
pymoo: Multi-Objective Optimization in Python,
J. Blank and K. Deb, “pymoo: Multi-Objective Optimization in Python,” IEEE Access, vol. 8, pp. 89497–89509, 2020, doi: 10.1109/ACCESS.2020.2990567
-
[42]
Python Software Foundation, Python: Version 3.11.9, 2024. Ac- cessed: Oct. 30, 2025. [Online]. Available: https://www.python. org/ 17 Appendix A There are no standard programs yet to create Maximal Disjoint Ball Decomposition (MDBD) objects. The master thesis [25] describes a method to create a MDBD Object, however, this script is not publicly available. ...
work page 2024
-
[43]
Computed mesh(x) using OPEN3D (closest point to Φ mesh)
Coarse grid setup and mesh distance field Generate a rectilinear coarse gridG r ={xijk}⊂Ω withN r nodes per axis. Computed mesh(x) using OPEN3D (closest point to Φ mesh). Mask: setϕmesh(x) =−∞for outside,ϕmesh(x) = 0 on surface, andϕmesh(x)>0 inside. Initialized sph(x)←+∞onGr
-
[44]
Findx ⋆= arg maxϕcomb(x) and r⋆ coarse = maxϕcomb(x)
Iterative placement (coarse→fine) form= 1toKdo Computeϕcomb(x) = min(ϕmesh(x),d sph(x)). Findx ⋆= arg maxϕcomb(x) and r⋆ coarse = maxϕcomb(x). ifr ⋆ coarse≤0then break Construct local fine gridG f aroundx ⋆. Recomputeϕmesh(p) andd sph(p) onG f. Computeϕcomb(p) = min(ϕmesh(p),d sph(p)). Findp ⋆= arg maxϕcomb(p) and r⋆= maxϕcomb(p). ifr ⋆≤0then continue App...
work page 1905
-
[45]
TABLE XI: Sphere centers and radii within the 2×1×1 cuboid
2x1x1 cuboid with 14 Spheres:First, the results of the cuboid filled with 14 spheres. TABLE XI: Sphere centers and radii within the 2×1×1 cuboid. Sphere Center X Center Y Center Z Radius 1 0.500031 0.500000 0.500000 0.500000 2 1.499969 0.499938 0.499938 0.499938 3 1.000000 0.177103 0.177103 0.177103 4 1.000000 0.177103 0.822897 0.177103 5 1.000000 0.82289...
-
[46]
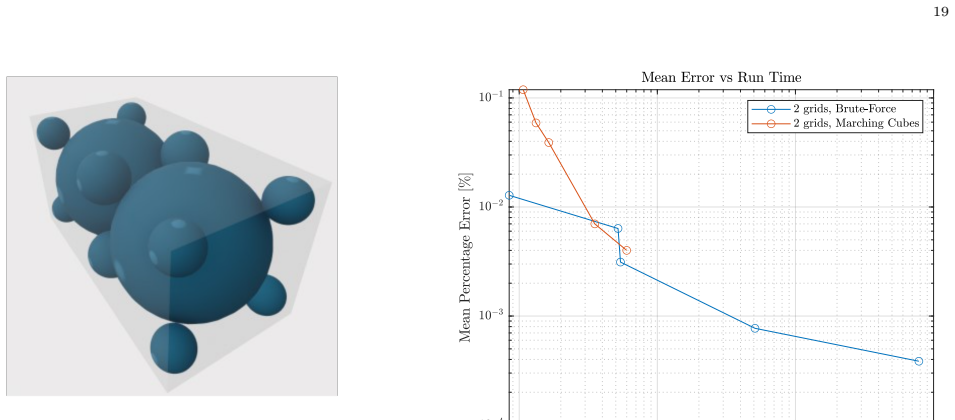
Comparison:When comparing the marching cube approach from [25] to the brute-force method developed for this paper, the numerical results can be seen in Ta- ble XII and this table is also displayed in Fig. 19. From the results we can see that the Brute-Force algorithm is more accurate, but also slower than the Marching Cube Algorithm. D. Conclusion To rest...
work page 2097
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.