Route-Constrained Robust Fusion Estimation for MEMS/GNSS Integrated Navigation of Unmanned Ground Vehicles in GNSS Degraded Environments
Pith reviewed 2026-06-26 17:54 UTC · model grok-4.3
The pith
Route matching to high-definition maps suppresses position drift in GNSS-denied tunnels for unmanned vehicles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
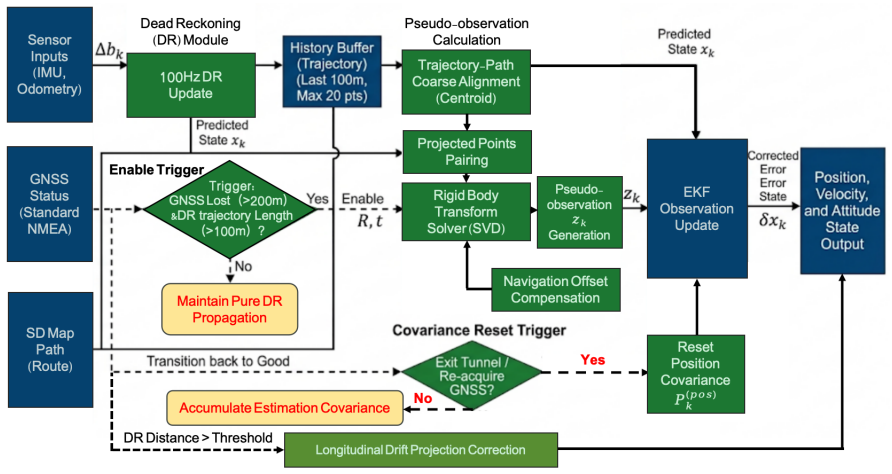
The central claim is that establishing correspondence between historical dead reckoning trajectory and local route segments via two-dimensional rigid transformation, and incorporating the resulting route-referenced position as a pseudo-position observation into an Extended Kalman Filter, allows continuous injection of route constraints to suppress position deviation relative to the mission route during GNSS outages.
What carries the argument
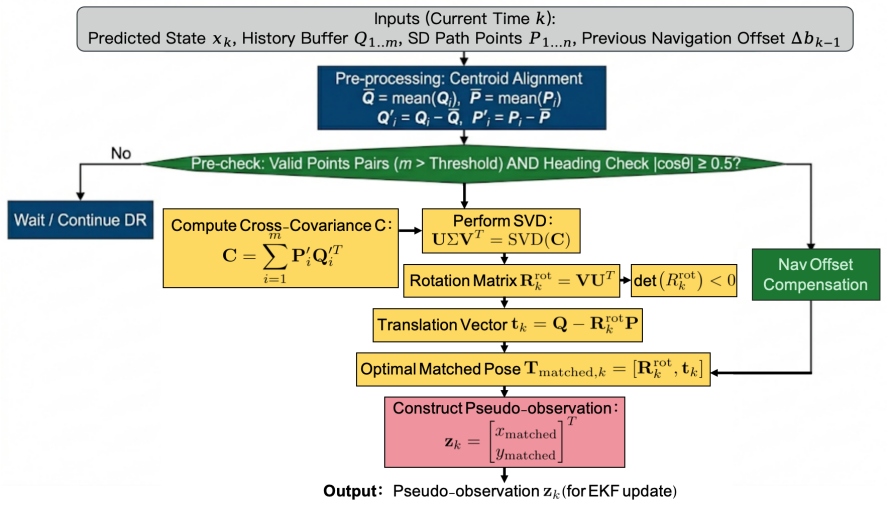
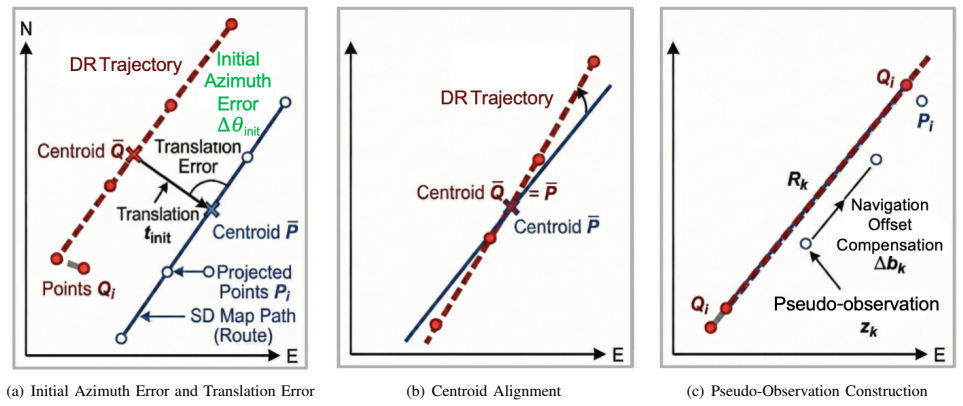
Route-referenced position estimation via two-dimensional rigid transformation between dead reckoning trajectory and map route segments, used as pseudo-observation in EKF update.
If this is right
- Suppresses error accumulation during satellite outages
- Reduces the risk of large maximum deviation
- Improves localization continuity and road-level usability
- Engineering strategies like trigger control and matching quality validation enhance applicability
Where Pith is reading between the lines
- The method may enable longer GNSS-denied operation in other structured road settings where high-definition maps exist.
- It indirectly improves azimuth estimates through repeated position constraints.
- The rigid transformation step assumes consistent planar correspondence, which could be tested on routes with sharp elevation changes.
Load-bearing premise
A high-definition map of the mission route is available and a reliable correspondence between the historical dead reckoning trajectory and local route segments can be established via two-dimensional rigid transformation.
What would settle it
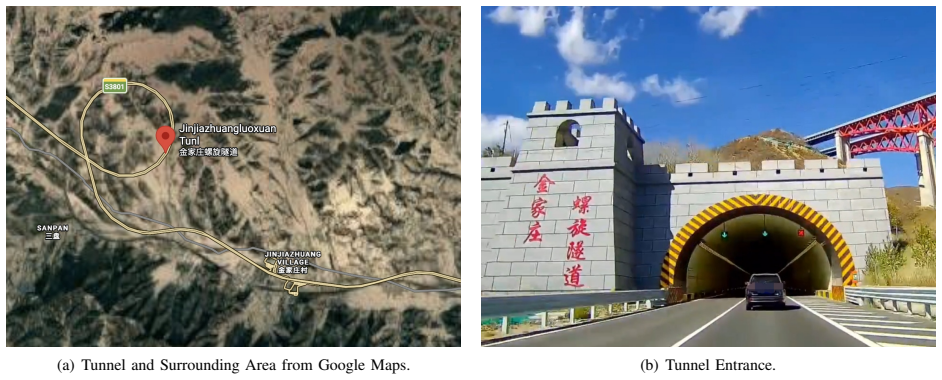
Running the experiments in the long tunnel, multi-segment tunnel, and curved tunnel without the route constraint and observing whether maximum position deviations exceed those reported with the method.
Figures
read the original abstract
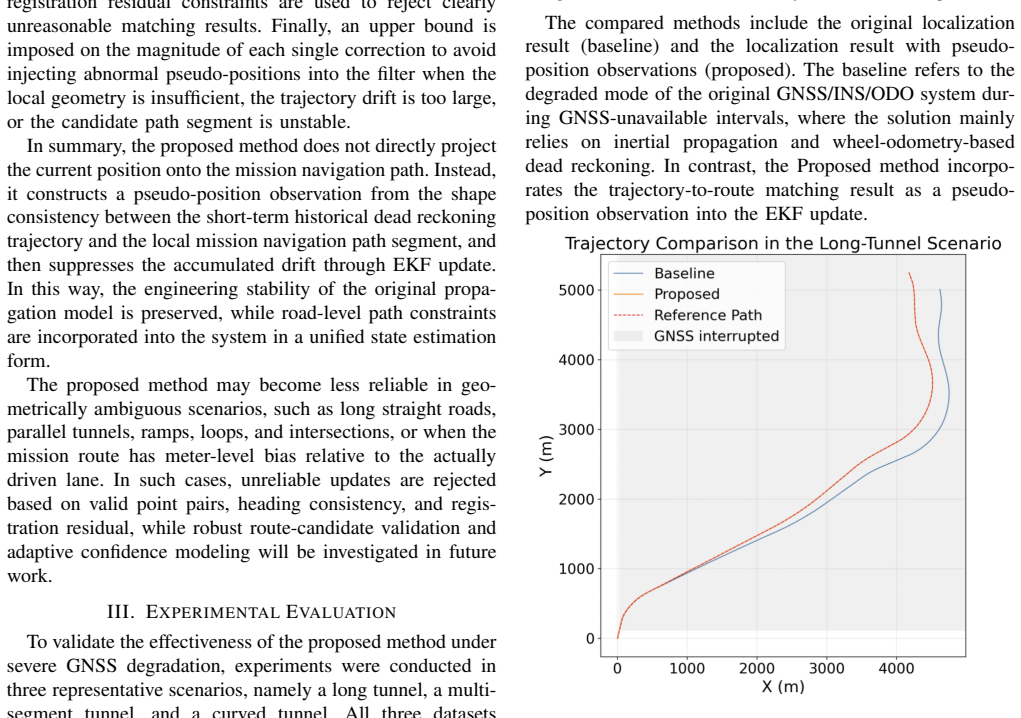
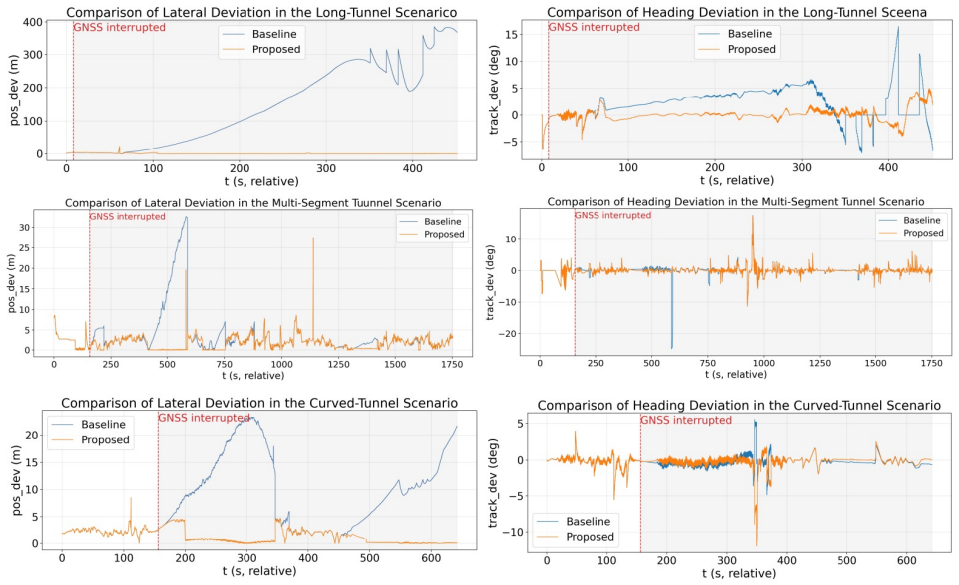
To address cumulative localization drift of unmanned ground vehicles in structured road environments under severe Global Navigation Satellite System signal occlusion, this paper proposes a robust route-constrained state estimation method. During periods without satellite signals, the proposed method establishes the correspondence between the historical dead reckoning trajectory and local segments of the mission route extracted from a high-definition map, and estimates a route-referenced position via a two-dimensional rigid transformation. The estimated position is then formulated as a pseudo-position observation and incorporated into an Extended Kalman Filter update. In this way, route constraints at the road level can be continuously injected into a unified state estimation framework, thereby suppressing position deviation relative to the mission route while indirectly improving azimuth estimation. To enhance practical applicability, engineering strategies, such as trigger control, matching quality validation, route offset compensation, and single update correction limiting, are further introduced. Experiments in three representative scenarios, including a long tunnel, a multi-segment tunnel, and a curved tunnel, show that the proposed method effectively suppresses error accumulation during satellite outages, reduces the risk of large maximum deviation, and improves localization continuity and road-level usability.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a route-constrained robust fusion estimation method for MEMS/GNSS integrated navigation of unmanned ground vehicles in GNSS degraded environments. During satellite outages, it uses a high-definition map to establish correspondence between historical dead reckoning trajectories and local route segments via 2D rigid transformation, generating pseudo-position observations for an Extended Kalman Filter. Engineering strategies including trigger control, matching quality validation, route offset compensation, and single update correction limiting are introduced. Experiments in three tunnel scenarios are reported to show suppression of error accumulation, reduced maximum deviation risk, and improved localization continuity.
Significance. If the matching robustness holds under realistic drift, the method could provide a practical means to inject road-level constraints into EKF-based navigation using readily available HD maps, potentially improving continuity in structured environments. The unified framework and listed engineering mitigations are pragmatic strengths. However, without quantitative support the significance cannot be assessed.
major comments (2)
- [Abstract] Abstract: the claim that experiments in three scenarios (long tunnel, multi-segment tunnel, curved tunnel) show effective suppression of error accumulation supplies no quantitative metrics, baseline comparisons, error bars, or data-exclusion rules, so the central experimental claim cannot be evaluated.
- [Method description] Method description (paragraph on pseudo-position update via 2D rigid transformation): the approach assumes DR errors remain approximately rigid over the matching window, yet no sensitivity analysis, failure-rate statistics, or maximum tolerable heading drift is reported despite the linear growth of heading bias; the listed mitigations (matching quality validation, route offset compensation) are mentioned but not quantified.
minor comments (1)
- [Abstract] Abstract: the phrase 'road-level usability' is invoked without a quantitative definition or metric.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the presentation of our experimental claims and the assumptions underlying the route-constrained fusion approach. We address each point below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that experiments in three scenarios (long tunnel, multi-segment tunnel, curved tunnel) show effective suppression of error accumulation supplies no quantitative metrics, baseline comparisons, error bars, or data-exclusion rules, so the central experimental claim cannot be evaluated.
Authors: We agree that the abstract, as a concise summary, does not include the quantitative metrics, baselines, or error statistics needed for immediate evaluation of the central claim. The full paper (Section V) reports these details with comparisons to standard EKF and DR baselines. To improve readability, we will revise the abstract to include key quantitative results such as maximum position error reductions (e.g., X% vs. baseline) and continuity metrics from the three tunnel scenarios. revision: yes
-
Referee: [Method description] Method description (paragraph on pseudo-position update via 2D rigid transformation): the approach assumes DR errors remain approximately rigid over the matching window, yet no sensitivity analysis, failure-rate statistics, or maximum tolerable heading drift is reported despite the linear growth of heading bias; the listed mitigations (matching quality validation, route offset compensation) are mentioned but not quantified.
Authors: The referee correctly identifies that the rigid-transformation assumption and the effectiveness of the listed mitigations are not supported by quantitative sensitivity or failure-rate data in the current manuscript. We will add a dedicated paragraph (or short subsection) in the method section that reports (i) sensitivity of matching success rate to heading drift over the window length used in our experiments, (ii) empirical failure rates observed across the three tunnel datasets, and (iii) quantitative improvement attributable to each mitigation (matching validation threshold, offset compensation, and single-update limiting) using the existing experimental logs. revision: yes
Circularity Check
No significant circularity; derivation relies on external map data and standard EKF
full rationale
The paper's core method matches historical DR trajectory to HD-map route segments via 2D rigid transform, then injects the result as a pseudo-position observation into an EKF. This chain depends on external map data and the validity of the rigid-transform assumption, neither of which is defined by the estimation equations themselves. No self-definitional steps, fitted-input predictions, or load-bearing self-citations are present in the abstract or described method. The experimental claims rest on real-world tunnel tests rather than tautological re-derivations.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A high-definition map of the mission route is available and accurate.
Reference graph
Works this paper leans on
-
[1]
Wheel-GINS: A GNSS/INS integrated navigation system with a wheel-mounted IMU,
Y . Wu, J. Kuang, X. Niu, C. Stachniss, L. Klingbeil, and H. Kuhlmann, “Wheel-GINS: A GNSS/INS integrated navigation system with a wheel-mounted IMU,”IEEE Transactions on Intelligent Transporta- tion Systems, 2025
2025
-
[2]
H. Zhang, “Robust statistics vs. machine learning vs. Bayesian in- ference: Insights into handling faulty GNSS measurements in field robotics,”arXiv preprint arXiv:2504.06015, 2025
arXiv 2025
-
[3]
GNSS/multisensor fusion using continuous-time factor graph opti- mization for robust localization,
H. Zhang, C. C. Chen, H. Vallery, and T. D. Barfoot, “GNSS/multisensor fusion using continuous-time factor graph opti- mization for robust localization,”IEEE Transactions on Robotics, vol. 40, pp. 4003–4023, 2024
2024
-
[4]
GNSS/IMU/ODO/LiDAR-SLAM integrated navigation system using IMU/ODO pre-integration,
L. Chang, Y . N. Chen, B. Li, K. Qin, and M. N. Li, “GNSS/IMU/ODO/LiDAR-SLAM integrated navigation system using IMU/ODO pre-integration,”Sensors, vol. 20, no. 17, p. 4702, 2020
2020
-
[5]
Robust GNSS shadow matching for smartphones in urban canyons,
H.-F. Ng, G. Zhang, and L. T. Hsu, “Robust GNSS shadow matching for smartphones in urban canyons,”IEEE Sensors Journal, vol. 21, no. 16, pp. 18307–18317, 2021
2021
-
[6]
3D vision aided GNSS real-time kinematic positioning for autonomous systems in urban canyons,
W. Wen, X. Bai, and L. T. Hsu, “3D vision aided GNSS real-time kinematic positioning for autonomous systems in urban canyons,” NA VIGATION, vol. 70, no. 3, p. navi.590, 2023
2023
-
[7]
3- D LiDAR-aided GNSS NLOS mitigation for reliable GNSS-RTK positioning in urban canyons,
X. Liu, W. Wen, F. Huang, H. Gao, Y . Wang, and L. T. Hsu, “3- D LiDAR-aided GNSS NLOS mitigation for reliable GNSS-RTK positioning in urban canyons,”IEEE Transactions on Instrumentation and Measurement, vol. 74, pp. 1–15, 2025
2025
-
[8]
ULOC: Learning to localize in complex large-scale environments with ultra- wideband ranges,
T. M. Nguyen, Y . Yang, T. D. Nguyen, S. Yuan, and L. Xie, “ULOC: Learning to localize in complex large-scale environments with ultra- wideband ranges,” inProc. IEEE Int. Conf. Robotics and Automation (ICRA), 2025
2025
-
[9]
3D mapping database-aided GNSS RTK and its assessments in urban canyons,
H. F. Ng and L. T. Hsu, “3D mapping database-aided GNSS RTK and its assessments in urban canyons,”IEEE Transactions on Aerospace and Electronic Systems, vol. 57, no. 5, pp. 3150–3164, 2021
2021
-
[10]
The path inference filter: Model-based low-latency map matching of probe vehicle data,
T. Hunter, P. Abbeel, and A. Bayen, “The path inference filter: Model-based low-latency map matching of probe vehicle data,”ACM Transactions on Intelligent Systems and Technology, vol. 5, no. 1, pp. 1–22, 2014
2014
-
[11]
Robust ve- hicular localization and map matching in urban environments through IMU, GNSS, and cellular signals,
Z. M. Kassas, M. K. Shamaei, J. Khalife, and J. Morales, “Robust ve- hicular localization and map matching in urban environments through IMU, GNSS, and cellular signals,”IEEE Intelligent Transportation Systems Magazine, vol. 12, no. 4, pp. 36–52, 2020
2020
-
[12]
Factor graph optimization for GNSS/INS integration: A comparison with the extended Kalman filter,
W. Wen, T. Pfeifer, X. Bai, and L. T. Hsu, “Factor graph optimization for GNSS/INS integration: A comparison with the extended Kalman filter,”NA VIGATION, vol. 68, no. 2, pp. 315–331, 2021
2021
-
[13]
GNSS outlier mitigation via grad- uated non-convexity factor graph optimization,
W. Wen, G. Zhang, and L. T. Hsu, “GNSS outlier mitigation via grad- uated non-convexity factor graph optimization,”IEEE Transactions on V ehicular Technology, vol. 71, no. 1, pp. 297–310, 2022
2022
-
[14]
High accuracy tightly-coupled integrity monitoring algorithm for map-matching,
L. Li, M. A. Quddus, and L. Zhao, “High accuracy tightly-coupled integrity monitoring algorithm for map-matching,”Transportation Research Part C: Emerging Technologies, vol. 36, pp. 13–26, 2013
2013
-
[15]
GNSS-RTK adaptively integrated with LiDAR/IMU odometry for continuously global posi- tioning in urban canyons,
J. Zhang, X. Liu, W. Wen, and L. T. Hsu, “GNSS-RTK adaptively integrated with LiDAR/IMU odometry for continuously global posi- tioning in urban canyons,”Applied Sciences, vol. 12, no. 10, p. 5193, 2022
2022
-
[16]
Trajectory smoothing us- ing GNSS/PDR integration via factor graph optimization in urban canyons,
Y . Zhong, W. Wen, and L. T. Hsu, “Trajectory smoothing us- ing GNSS/PDR integration via factor graph optimization in urban canyons,”IEEE Internet of Things Journal, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.