Kiko: Programming Agents to Enact Interaction Protocols
Pith reviewed 2026-06-26 01:21 UTC · model grok-4.3
The pith
Kiko lets programmers implement agents via decision makers that select mutually compatible actions from a protocol, proving compliance and full enactment of any protocol.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Kiko is a protocol-based programming model for agents in which a programmer writes one or more decision makers, each of which chooses from among a set of valid decisions and makes mutually compatible decisions on what messages to send. By completely abstracting away the underlying communication service and by supporting practical decision-making patterns, Kiko enables agent developers to focus on business logic. The model is equipped with an operational semantics that establishes Kiko agents are protocol compliant and able to realize any protocol enactment.
What carries the argument
Decision makers, each selecting from valid protocol actions while guaranteeing mutual compatibility across message choices.
If this is right
- Any agent coded in Kiko will remain protocol compliant throughout execution.
- Every possible enactment permitted by a protocol can be produced by some Kiko agent.
- Programmers need not handle communication primitives or message ordering themselves.
- Decision logic can be written independently for each agent without reference to the communication service.
Where Pith is reading between the lines
- Kiko could reduce errors in multiagent applications by making protocol adherence a built-in property rather than a manual check.
- Tool support for generating or verifying decision makers might become feasible once the operational semantics are implemented in a concrete language.
- The separation of decision making from communication might extend to other distributed systems that rely on prescribed interaction patterns.
Load-bearing premise
A programmer can always write decision makers that produce mutually compatible decisions from the valid protocol actions available at each step.
What would settle it
A concrete protocol for which no collection of decision makers can produce compatible choices at some reachable state, so that at least one allowed enactment cannot be realized.
Figures

read the original abstract
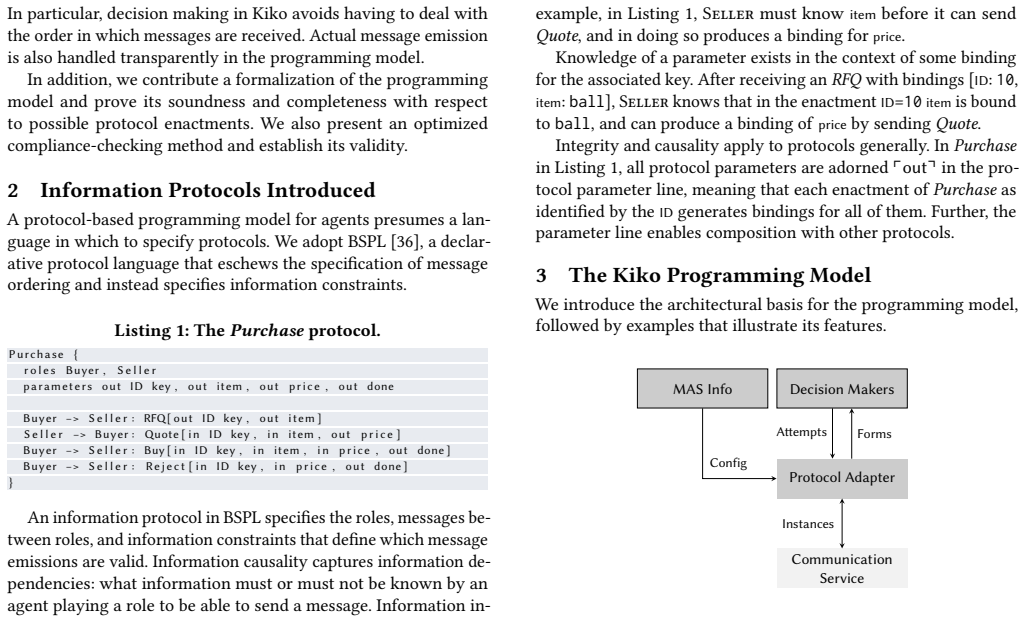
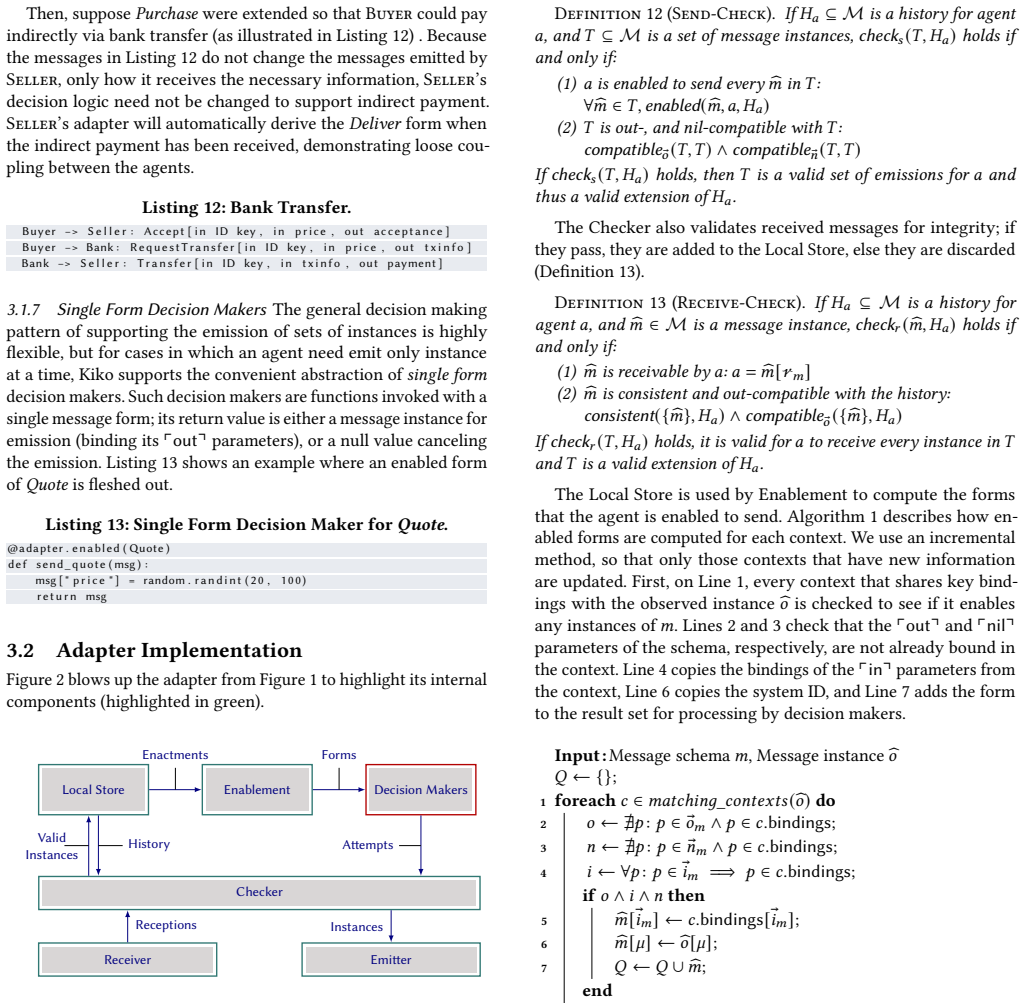
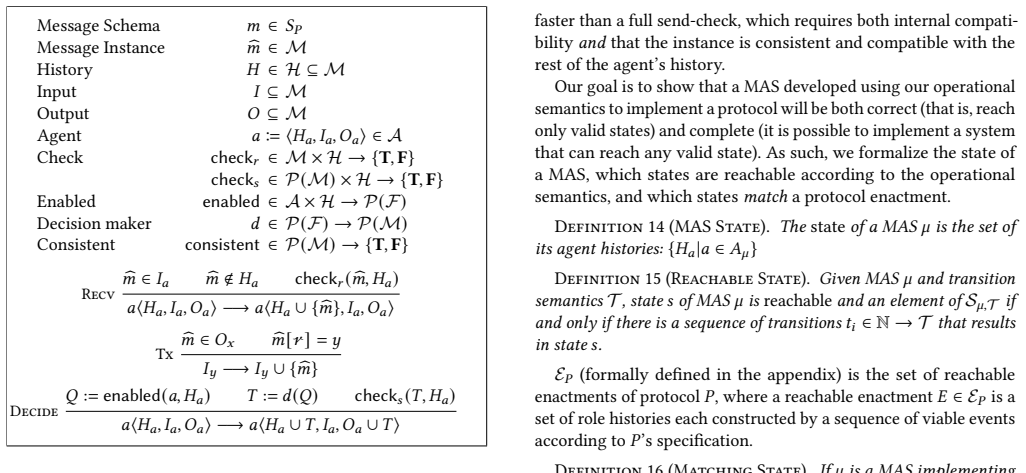
Realizing a multiagent system involves implementing member agents who interact based on a protocol while making decisions in a decentralized manner. Current programming models for agents offer poor abstractions for decision making and fail to adequately bridge an agent's internal decision logic with its public decisions. We present Kiko, a protocol-based programming model for agents. To implement an agent, a programmer writes one or more decision makers, each of which chooses from among a set of valid decisions and makes mutually compatible decisions on what messages to send. By completely abstracting away the underlying communication service and by supporting practical decision-making patterns, Kiko enables agent developers to focus on business logic. We provide an operational semantics for Kiko and establish that Kiko agents are protocol compliant and able to realize any protocol enactment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Kiko, a protocol-based programming model for multi-agent systems. To implement an agent, a programmer supplies one or more decision makers, each of which selects from the set of valid protocol actions at each step while ensuring that the chosen decisions remain mutually compatible. The model completely abstracts the underlying communication service. The authors supply an operational semantics for Kiko and claim to prove both that Kiko agents are protocol compliant and that they are able to realize any protocol enactment.
Significance. If the proofs are complete, the work supplies a clean abstraction layer that lets agent developers concentrate on business logic rather than message transport or protocol bookkeeping. The explicit operational semantics and the two stated theorems (compliance and realizability) constitute a concrete technical contribution that could be reused by subsequent protocol-verification or agent-programming efforts.
major comments (1)
- [Abstract / §4] Abstract and §4 (realizability theorem): the claim that Kiko agents can realize any protocol enactment rests on the unstated assumption that, for every protocol, a programmer can always supply decision makers whose outputs remain mutually compatible at each step. No general construction, existence theorem, or proof that such compatible decision makers exist for arbitrary (including history-dependent or interdependent) protocols is supplied; without it the universal realizability result does not follow from the operational semantics alone.
minor comments (1)
- [Abstract] The abstract refers to 'practical decision-making patterns' supported by Kiko; an explicit enumeration or reference to the relevant subsection would help readers locate them.
Simulated Author's Rebuttal
We thank the referee for the careful reading and for identifying this important point about the realizability claim. We address the comment below and will revise the manuscript to clarify the statement.
read point-by-point responses
-
Referee: [Abstract / §4] Abstract and §4 (realizability theorem): the claim that Kiko agents can realize any protocol enactment rests on the unstated assumption that, for every protocol, a programmer can always supply decision makers whose outputs remain mutually compatible at each step. No general construction, existence theorem, or proof that such compatible decision makers exist for arbitrary (including history-dependent or interdependent) protocols is supplied; without it the universal realizability result does not follow from the operational semantics alone.
Authors: We agree that the realizability result stated in the abstract and §4 relies on the assumption that, for a given protocol, the programmer can supply decision makers whose outputs are mutually compatible at each step. The operational semantics establishes that any protocol enactment can be realized (and compliance is guaranteed) precisely when such compatible decision makers are provided; it does not itself prove existence of the decision makers. Our contribution centers on the programming model and its semantics rather than on a general synthesis procedure for decision makers. For many protocols, including history-dependent ones, compatible decision makers can be realized by maintaining appropriate local state in each decision maker or by using a single decision maker that coordinates the choices. We will revise the abstract and §4 to state the assumption explicitly and to qualify the realizability theorem as holding conditional on the provision of compatible decision makers. revision: yes
Circularity Check
No circularity: claims derived from newly defined operational semantics
full rationale
The paper introduces Kiko via a new operational semantics and derives protocol compliance plus realizability directly from that semantics. No steps reduce by construction to prior fitted values, self-citations, or self-definitional loops; the decision-maker compatibility assumption is an explicit modeling premise rather than a hidden tautology. The derivation is self-contained in the formalization and does not rely on load-bearing prior author results.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Protocols are given as sets of valid message sequences with associated decision points.
- domain assumption Decision makers can be written to select only valid and mutually compatible actions.
invented entities (1)
-
Decision maker
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Gul A. Agha. 1986.Actors. MIT Press, Cambridge, Massachusetts. https: //doi.org/10.7551/mitpress/1086.001.0001
-
[2]
Matteo Baldoni, Cristina Baroglio, Federico Capuzzimati, and Roberto Micalizio
-
[3]
Journal on Data Semantics8, 2 (June 2019), 99–112
Process Coordination with Business Artifacts and Multiagent Technologies. Journal on Data Semantics8, 2 (June 2019), 99–112. https://doi.org/10.1007/s13740- 019-00100-8
-
[4]
Chopra, Nirmit Desai, Viviana Patti, and Munindar P
Matteo Baldoni, Cristina Baroglio, Amit K. Chopra, Nirmit Desai, Viviana Patti, and Munindar P. Singh. 2009. Choice, Interoperability, and Conformance in Interaction Protocols and Service Choreographies. InProceedings of the 8th In- ternational Conference on Autonomous Agents and MultiAgent Systems (AAMAS). IFAAMAS, Budapest, 843–850. https://doi.org/10.5...
-
[5]
Matteo Baldoni, Cristina Baroglio, Roberto Micalizio, and Stefano Tedeschi. 2021. Robustness Based on Accountability in Multiagent Organizations. InProceedings of the 20th International Conference on Autonomous Agents and MultiAgent Systems (AAMAS). IFAAMAS, Online, 142–150. https://doi.org/10.5555/3461017.3461040
-
[6]
2007.Developing Multi-Agent Systems with JADE
Fabio Bellifemine, Giovanni Caire, and Dominic Greenwood. 2007.Developing Multi-Agent Systems with JADE. Wiley, Chichester, UK. https://doi.org/10.1002/ 9780470058411
2007
-
[7]
Federico Bergenti, Giovanni Caire, Stefania Monica, and Agostino Poggi. 2020. The First Twenty Years of Agent-Based Software Development with JADE.Jour- nal of Autonomous Agents and Multi-Agent Systems (JAAMAS)34, 2 (2020), 36. https://doi.org/10.1007/s10458-020-09460-z
-
[8]
Physiological noise and signal-to-noise ratio in fMRI with multi-channel array coils
Olivier Boissier, Rafael H. Bordini, Jomi Fred Hübner, Alessandro Ricci, and Andrea Santi. 2013. Multi-agent oriented programming with JaCaMo.Science of Computer Programming78, 6 (June 2013), 747–761. https://doi.org/10.1016/j. scico.2011.10.004
work page doi:10.1016/j 2013
-
[9]
Rafael H. Bordini and Jomi Fred Hübner. 2010. Semantics for the Jason Variant of AgentSpeak (Plan Failure and some Internal Actions). InProceedings of the 19th European Conference on Artificial Intelligence (ECAI) (Frontiers in Artificial Intelligence and Applications, Vol. 215). IOS Press, Lisbon, 635–640. https://doi. org/10.3233/978-1-60750-606-5-635
-
[10]
Luca Cernuzzi, Thomas Juan, Leon Sterling, and Franco Zambonelli. 2004. The Gaia Methodology. InMethodologies and Software Engineering for Agent Systems: The Agent-Oriented Software Engineering Handbook, Federico Bergenti, Marie- Pierre Gleizes, and Franco Zambonelli (Eds.). Multiagent Systems, Artificial Societies, and Simulated Organizations, Vol. 11. K...
-
[11]
Amit K. Chopra, Alexander Artikis, Jamal Bentahar, Marco Colombetti, Frank Dignum, Nicoletta Fornara, Andrew J. I. Jones, Munindar P. Singh, and Pınar Yolum. 2013. Research Directions in Agent Communication.ACM Transactions on Intelligent Systems and Technology (TIST)42, 2, Article 20 (March 2013), 23 pages. https://doi.org/10.1145/2438653.2438655
-
[12]
Amit K. Chopra, Samuel H. Christie V, and Munindar P. Singh. 2020. An Evalu- ation of Communication Protocol Languages for Engineering Multiagent Sys- tems.Journal of Artificial Intelligence Research (JAIR)69 (Dec. 2020), 1351–1393. https://doi.org/10.1613/jair.1.12212
-
[13]
Samuel H. Christie V, Amit K. Chopra, and Munindar P. Singh. 2021. Bungie: Improving Fault Tolerance via Extensible Application-Level Protocols.IEEE Computer54, 5 (May 2021), 44–53. https://doi.org/10.1109/MC.2021.3052147
-
[14]
Samuel H. Christie V, Amit K. Chopra, and Munindar P. Singh. 2022. Mandrake: Multiagent Systems as a Basis for Programming Fault-Tolerant Decentralized Applications.Journal of Autonomous Agents and Multi-Agent Systems (JAAMAS) 36, 1, Article 16 (April 2022), 30 pages. https://doi.org/10.1007/s10458-021-09540- 8
-
[15]
Christie V, Daria Smirnova, Amit K
Samuel H. Christie V, Daria Smirnova, Amit K. Chopra, and Munindar P. Singh
-
[16]
Protocols Over Things: A Decentralized Programming Model for the Internet of Things.IEEE Computer53, 12 (Dec. 2020), 60–68. https://doi.org/10. 1109/MC.2020.3023887
arXiv 2020
-
[18]
Nirmit Desai, Ashok U. Mallya, Amit K. Chopra, and Munindar P. Singh. 2005. Interaction Protocols as Design Abstractions for Business Processes.IEEE Transactions on Software Engineering31, 12 (Dec. 2005), 1015–1027. https: //doi.org/10.1109/TSE.2005.140
-
[19]
Nirmit Desai and Munindar P. Singh. 2008. On the Enactability of Business Protocols. InProceedings of the 23rd Conference on Artificial Intelligence (AAAI). AAAI Press, Chicago, 1126–1131. http://www.aaai.org/Library/AAAI/2008/ aaai08-178.php
2008
-
[20]
Angelo Ferrando, Michael Winikoff, Stephen Cranefield, Frank Dignum, and Viviana Mascardi. 2019. On Enactability of Agent Interaction Protocols: Towards a Unified Approach. InProceedings of the 7th International Workshop on Engineer- ing Multi-Agent Systems (EMAS) (Lecture Notes in Computer Science, Vol. 12058). Springer, Montréal, 43–64. https://doi.org/...
-
[21]
FIPA. 2003. FIPA Interaction Protocol Specifications. http://www.fipa.org/ repository/ips.html FIPA: The Foundation for Intelligent Physical Agents. Ac- cessed 2023-02-27
2003
-
[22]
Stéphane Galland, Sebastian Rodriguez, and Nicolas Gaud. 2020. Run-time En- vironment for the SARL Agent-Programming Language: The Example of the Janus platform.Future Generation Computer Systems107 (June 2020), 1105–1115. https://doi.org/10.1016/j.future.2017.10.020
-
[23]
Akin Günay and Amit K. Chopra. 2018. Stellar: A Programming Model for Developing Protocol-Compliant Agents. InProceedings of the 6th International Workshop on Engineering Multi-Agent Systems (EMAS) (Lecture Notes in Computer Science, Vol. 11375). Springer, Stockholm, 117–136. https://doi.org/10.1007/978-3- 030-25693-7_7
-
[24]
Akın Günay, Michael Winikoff, and Pınar Yolum. 2015. Dynamically Generated Commitment Protocols in Open Systems.Journal of Autonomous Agents and Multi-Agent Systems (JAAMAS)29, 2 (March 2015), 192–229. https://doi.org/10. 1007/s10458-014-9251-7
2015
-
[25]
Carl Hewitt, Peter Bishop, and Richard Steiger. 1973. A Universal Modular Actor Formalism for Artificial Intelligence. InProceedings of the 3rd International Joint Conference on Artificial Intelligence (IJCAI). William Kaufmann, Stanford, 235–245. http://ijcai.org/Proceedings/73/Papers/027B.pdf
1973
-
[26]
Kohei Honda, Nobuko Yoshida, and Marco Carbone. 2008. Multiparty Asynchro- nous Session Types. InProceedings of the 35th ACM SIGPLAN-SIGACT Symposium on Principles of Programming Languages (POPL). ACM, San Francisco, 273–284. https://doi.org/10.1145/1328438.1328472
-
[27]
Huhns, Nigel Jacobs, Tomasz Ksiezyk, Wei-Min Shen, Munindar P
Michael N. Huhns, Nigel Jacobs, Tomasz Ksiezyk, Wei-Min Shen, Munindar P. Singh, and Philip E. Cannata. 1992. Enterprise Information Modeling and Model Integration in Carnot. InEnterprise Integration Modeling: Proceedings of the First International Conference, Charles J. Petrie, Jr. (Ed.). MIT Press, Hilton Head, South Carolina, 290–299. https://doi.org/1...
-
[28]
Chopra, and Munindar P
Thomas Christopher King, Akın Günay, Amit K. Chopra, and Munindar P. Singh
-
[29]
In Proceedings of the 26th International Joint Conference on Artificial Intelligence (IJCAI)
Tosca: Operationalizing Commitments over Information Protocols. In Proceedings of the 26th International Joint Conference on Artificial Intelligence (IJCAI). IJCAI, Melbourne, 256–264. https://doi.org/10.24963/ijcai.2017/37
-
[30]
Rodrigo N. Laigner, Yongluan Zhou, Marcos Antonio Vaz Salles, Yijian Liu, and Marcos Kalinowski. 2021. Data Management in Microservices: State of the Prac- tice, Challenges, and Research Directions.Proceedings of the VLDB Endowment 14, 13 (Sept. 2021), 3348–3361. https://doi.org/10.14778/3484224.3484232
-
[31]
Mark Little. 2017. Virtual Panel: Microservices in Practice. https://www.infoq. com/articles/microservices-in-practice/. Accessed: 1 Mar 2023
2017
-
[32]
James Odell, H. Van Dyke Parunak, and Bernhard Bauer. 2001. Representing Agent Interaction Protocols in UML. InProceedings of the 1st International Workshop on Agent-Oriented Software Engineering (AOSE 2000) (Lecture Notes in Computer Science, Vol. 1957). Springer, Toronto, 121–140. https://doi.org/10.1007/3-540- 44564-1_8
-
[33]
Lin Padgham and Michael Winikoff. 2005. Prometheus: A Practical Agent- Oriented Methodology. InAgent-Oriented Methodologies, Brian Henderson-Sellers and Paolo Giorgini (Eds.). Idea Group, Hershey, Pennsylvania, Chapter 5, 107–135. https://doi.org/10.4018/978-1-59140-581-8.ch005
-
[34]
Jeremy Pitt, Julia Schaumeier, and Alexander Artikis. 2012. Axiomatization of Socio-Economic Principles for Self-Organizing Institutions: Concepts, Experi- ments and Challenges.ACM Transactions on Autonomous and Adaptive Systems (TAAS)7, 4, Article 39 (Dec. 2012), 39 pages. https://doi.org/10.1145/2382570. 2382575
-
[35]
Jerome H. Saltzer, David P. Reed, and David D. Clark. 1984. End-To-End Argu- ments in System Design.ACM Transactions on Computer Systems2, 4 (Nov. 1984), 277–288. https://doi.org/10.1145/357401.357402
-
[36]
Munindar P. Singh. 1996. Synthesizing Distributed Constrained Events from Transactional Workflow Specifications. InProceedings of the 12th International Conference on Data Engineering (ICDE). IEEE, New Orleans, 616–623. https: //doi.org/10.1109/ICDE.1996.492212
-
[37]
Munindar P. Singh. 1998. Agent Communication Languages: Rethinking the Principles.IEEE Computer31, 12 (Dec. 1998), 40–47. https://doi.org/10.1109/2. 735849
work page doi:10.1109/2 1998
-
[38]
Munindar P. Singh. 1998. A Customizable Coordination Service for Autonomous Agents. InIntelligent Agents IV: Proceedings of the 4th International Workshop on Agent Theories, Architectures, and Languages (ATAL-97) (Lecture Notes in Computer Science, 1365). Springer, Providence, Rhode Island, 93–106. https://doi.org/10. 1007/BFb0026752
1998
-
[39]
Munindar P. Singh. 2011. Information-Driven Interaction-Oriented Program- ming: BSPL, the Blindingly Simple Protocol Language. InProceedings of the 10th International Conference on Autonomous Agents and MultiAgent Systems (AAMAS). IFAAMAS, Taipei, 491–498. https://doi.org/10.5555/2031678.2031687
-
[40]
Munindar P. Singh. 2013. Norms as a Basis for Governing Sociotechnical Systems. ACM Transactions on Intelligent Systems and Technology (TIST)5, 1, Article 21 (Dec. 2013), 23 pages. https://doi.org/10.1145/2542182.2542203
-
[41]
Munindar P. Singh and Amit K. Chopra. 2020. Clouseau: Generating Commu- nication Protocols from Commitments. InProceedings of the 34th Conference on Artificial Intelligence (AAAI). AAAI Press, New York, 7244–7252. https: //doi.org/10.1609/aaai.v34i05.6215
-
[42]
Benjamin Smith. 2021. Getting started with serverless for developers: Part 2 - The business logic. https://aws.amazon.com/blogs/compute/getting-started-with- serverless-for-developers-part-2-the-business-logic/. Accessed: 1 Mar 2023
2021
-
[43]
Danny Weyns, Andrea Omicini, and James Odell. 2007. Environment as a First Class Abstraction in Multiagent Systems.Journal of Autonomous Agents and Multi- Agent Systems (JAAMAS)14, 1 (Feb. 2007), 5–30. https://doi.org/10.1007/s10458- 006-0012-0
-
[44]
Michael Winikoff. 2007. Implementing Commitment-Based Interactions. In Proceedings of the 6th International Joint Conference on Autonomous Agents and MultiAgent Systems (AAMAS). IFAAMAS, Honolulu, 868–875. https://doi.org/10. 1145/1329125.1329283
arXiv 2007
-
[45]
Michael Winikoff, Nitin Yadav, and Lin Padgham. 2018. A New Hierarchical Agent Protocol Notation.Journal of Autonomous Agents and Multi-Agent Systems (JAAMAS)32, 1 (Jan. 2018), 59–133. https://doi.org/10.1007/s10458-017-9373-9
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.