A New computation reduction based nonlinear Kalman filter
Pith reviewed 2026-05-24 17:55 UTC · model grok-4.3
The pith
A hybrid Kalman filter uses sigma-point propagation with EKF linearization to reach third-order accuracy at half the cost of the unscented filter.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a Kalman filter variant using deterministic sigma-point sampling to propagate mean and covariance while employing EKF linearization for the prior achieves third-order accuracy and reduces UKF computation cost by roughly 50 percent, with better accuracy than the EKF.
What carries the argument
The hybrid framework that applies deterministic sigma-point propagation for the state mean and covariance together with EKF linearization for the prior.
If this is right
- The filter maintains numerical stability for real-time applications.
- Accuracy exceeds the EKF because of third-order propagation of mean and covariance.
- Computation cost is reduced by about 50 percent relative to the UKF.
- The method is simpler than other reduced-cost UKF variants previously proposed.
Where Pith is reading between the lines
- The same mixing of sigma-point and linearization steps might be tried in other nonlinear estimators to trade accuracy against cost.
- Verification on systems with stronger nonlinearity or higher state dimension would test whether the claimed savings and accuracy hold beyond the presented examples.
- If the third-order property is robust, the filter could serve as a drop-in replacement in applications where EKF accuracy is insufficient but full UKF cost is prohibitive.
Load-bearing premise
The assumption that mixing sigma-point propagation with EKF linearization simultaneously produces third-order accuracy, halves computation, and avoids new approximation errors or instability.
What would settle it
A benchmark test on a standard nonlinear system where the method either fails to cut computation by 50 percent or shows accuracy no better than the EKF would falsify the claim.
Figures
read the original abstract
This article introduces a new algorithm for nonlinear state estimation based on deterministic sigma point and EKF linearized framework for priori mean and covariance respectively. This method reduces the computation cost of UKF about 50% and has better accuracy compared to EKF due to propagating mean and Covariance of state to 3rd order Taylor series. Several types of Kalman filter have been presented before to reduce the computation cost of UKF, however, this new KF is a better choice because of its simplicity, numerical stability, and accuracy for real-time implementation. Examples verify the effectiveness of the proposed method.
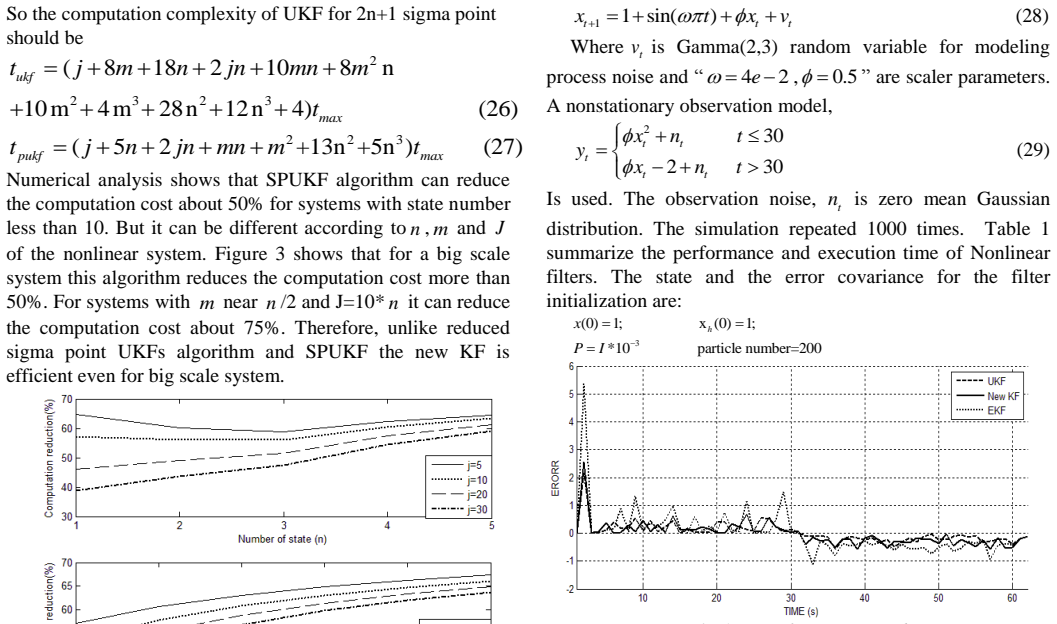
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
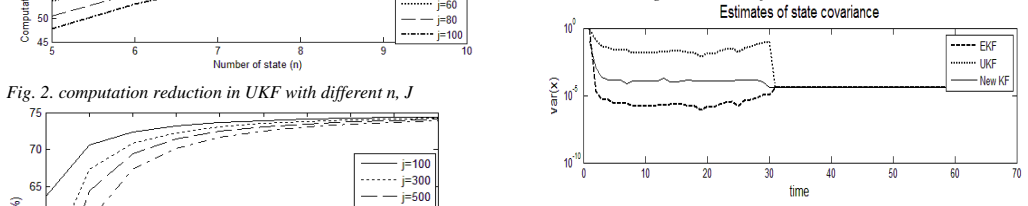
Summary. The paper proposes a hybrid nonlinear Kalman filter that combines deterministic sigma-point propagation with an EKF-linearized framework specifically for the prior mean and covariance. It claims this yields a roughly 50% reduction in computation relative to the UKF while delivering third-order Taylor-series accuracy for both mean and covariance (hence superior accuracy to the EKF), together with simplicity and numerical stability suitable for real-time use; effectiveness is asserted via examples.
Significance. A correctly derived and validated hybrid filter of this type would be of practical interest for real-time nonlinear estimation, offering a potential middle ground between EKF speed and UKF accuracy. The significance is currently limited by the absence of an explicit derivation showing how EKF linearization on the prior can still recover third-order moments.
major comments (2)
- [Abstract] Abstract: the central claim that the method propagates mean and covariance 'to 3rd order Taylor series' while employing an 'EKF linearized framework for priori mean and covariance respectively' is internally inconsistent; standard first-order EKF linearization cannot restore the third-order terms of the UKF sigma-point expansion without an additional, unstated correction step.
- [Abstract] Abstract: the asserted 50% computation reduction relative to UKF is presented without any operation-count table, flop comparison, or reference to the specific sigma-point set and linearization steps that would produce that factor; this figure is load-bearing for the paper's contribution yet unsupported by derivation or data.
minor comments (1)
- [Abstract] Abstract: the sentence 'Several types of Kalman filter have been presented before to reduce the computation cost of UKF' lacks citations to the relevant prior art.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract. We will revise the manuscript to improve clarity on the hybrid approach and provide the requested supporting analysis and derivation.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the method propagates mean and covariance 'to 3rd order Taylor series' while employing an 'EKF linearized framework for priori mean and covariance respectively' is internally inconsistent; standard first-order EKF linearization cannot restore the third-order terms of the UKF sigma-point expansion without an additional, unstated correction step.
Authors: The abstract phrasing is ambiguous and we agree it requires clarification. The proposed method is a hybrid: deterministic sigma-point sampling is used to propagate the state and achieve third-order Taylor accuracy for the updated mean and covariance, while an EKF-style linearization is applied only to the prior mean and covariance computation to reduce the number of nonlinear function evaluations. We will revise the abstract for precision and add an explicit derivation (in the main text) showing how the hybrid retains the higher-order moments without requiring an extra correction term beyond the sigma-point mechanism. revision: yes
-
Referee: [Abstract] Abstract: the asserted 50% computation reduction relative to UKF is presented without any operation-count table, flop comparison, or reference to the specific sigma-point set and linearization steps that would produce that factor; this figure is load-bearing for the paper's contribution yet unsupported by derivation or data.
Authors: We agree the 50% reduction claim needs quantitative support. In the revision we will insert a computational complexity analysis, including an operation-count table. This will reference the specific sigma-point set (2n+1 points) and demonstrate that applying EKF linearization solely to the prior step halves the nonlinear propagations relative to a full UKF, yielding the stated reduction factor. revision: yes
Circularity Check
No significant circularity; claims presented as outcomes of proposed hybrid method
full rationale
The paper proposes a hybrid nonlinear Kalman filter using deterministic sigma-point propagation combined with EKF linearization for the prior mean and covariance. Performance assertions (approximately 50% UKF cost reduction and third-order Taylor accuracy) are stated as consequences of the algorithm rather than inputs or self-referential definitions. No equations, fitted parameters, or self-citations appear in the provided text that would reduce any central claim to its own construction. The derivation is self-contained against external references such as standard UKF and EKF.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The hybrid sigma-point plus EKF-linearization construction propagates statistics to third-order Taylor accuracy while halving UKF cost
Reference graph
Works this paper leans on
-
[1]
A new method for the nonlinear transfo rmation of means and covariances in filters and estimators
Julier, Simon, Jeffrey Uhlmann, and Hugh F. Durrant -Whyte. "A new method for the nonlinear transfo rmation of means and covariances in filters and estimators." IEEE Transactions on automatic control 45.3 (2000): 477-482
work page 2000
-
[2]
Biswas, Sanat K., Li Qiao, and Andrew G. Dempster. "A novel a priori state computation strategy for the unscented Kalman filter to imp rove computational efficiency." IEEE transactions on Automatic Control 62.4 (2017): 1852-1864.W.-K. Chen, Linear Networks and Systems. Belmont, CA: Wadsworth, 1993, pp. 123–135
work page 2017
-
[3]
Infrared navigation —Part I: An assessment of feasibility,
J. U. Duncombe, “Infrared navigation —Part I: An assessment of feasibility,” IEEE Trans. Electron Devices, vol. ED-11, no. 1, pp. 34–39, Jan. 1959
work page 1959
-
[4]
Computationally efficient simplex unscented Kalman filter based on numerical integration
Hu, B. Q., et al. "Computationally efficient simplex unscented Kalman filter based on numerical integration." Asian Journal of Control 16.3 (2014): 915-921.E. H. Miller, “A note on reflec tor arrays,” IEEE Trans. Antennas Propagat., to be published
work page 2014
-
[5]
Julier, Simon J., and Jeffrey K. Uhlmann. "Reduced sigma point filters for the propagation of means and covariances through nonlinear transformations." American Control Conference, 2002. Proceed ings of the 2002. Vol. 2. IEEE, 2002
work page 2002
-
[6]
The spherical simplex unscented transformation
Julier, Simon J. "The spherical simplex unscented transformation." American Control Conference, 2003. Proceedings of the 2003 . Vol. 3. IEEE, 2003. E. E. Reber, R. L. Michell, and C. J. Carter, “Oxygen absorption in the earth’s atmosphere,” Aerospace Corp., Los Angeles, CA, Tech. Rep. TR-0200 (4230-46)-3, Nov. 1988
work page 2003
-
[7]
Julier, Simon J., and Jeffrey K. Uhlmann. A general method for approximating nonlinear transformations of probability dis tributions. Technical report, Robotics Research Group, Department of Engineering Science, University of Oxford, 1996
work page 1996
-
[8]
A numerical -integration perspective on Gaussian filters,
Y. Wu, D. Hu, M. Wu, and X. Hu, “A numerical -integration perspective on Gaussian filters,” IEEE Transactions on Signal Processing, vol. 54 , no.8, pp. 2910–2921, 2006
work page 2006
-
[9]
I. Arasaratnam and S. Haykin, “Cubature Kalman filters,” IEEE Transactions on Automatic Control, vol. 54, no.6, pp. 1254 –1269, 2009
work page 2009
-
[10]
Gaussian filters for nonlinear filtering problems,
K. Ito and K. Xiong, “Gaussian filters for nonlinear filtering problems,” IEEE Transaction s on Automatic Control, vol. 45, no.5, pp. 910–927, 2000
work page 2000
-
[11]
Loosely Coupled INS/GPS Integration with Constant Lever Arm using Marginal Unscented Kalman Filter,
G. Chang, “Loosely Coupled INS/GPS Integration with Constant Lever Arm using Marginal Unscented Kalman Filter,” Journal of Navigation, vol. 67, pp. 419–436, 2013
work page 2013
-
[12]
Evaluation of matrix square root operations for UKF within a UAV GPS/INS sensor fusion application
Rhudy, Matthew, et al. "Evaluation of matrix square root operations for UKF within a UAV GPS/INS sensor fusion application." International Journal of Navigation and Observation2011 (2012)
work page 2012
-
[13]
On unscented Kalman filtering for state estimation of continuous-time nonlinear systems
Sarkka, Simo. "On unscented Kalman filtering for state estimation of continuous-time nonlinear systems ." IEEE Transactions on automatic control 52.9 (2007): 1631-1641
work page 2007
-
[14]
Characteristics Optimization of the Maglev Train Hybrid Suspension System Using Genetic Algorithm
Safaei, Farhad, et al. "Characteristics Optimization of the Maglev Train Hybrid Suspension System Using Genetic Algorithm." IEEE Transactions on Energy Conversion 30.3 (2015): 1163-1170
work page 2015
-
[15]
Unscented Filtering and Nonlinear Estimation,
S. Julier and J. Uhlmann, “Unscented Filtering and Nonlinear Estimation,” Proceedings of the IEEE, vol. 92, pp. 401–422, Mar. 2004
work page 2004
-
[16]
Maximum correntropy Kalman filter
Chen, Badong, et al. "Maximum correntropy Kalman filter." Automatica 76 (2017): 70-77
work page 2017
-
[17]
Papadimitriou, Christos H. Computational complexity. John Wiley and Sons Ltd., 2003
work page 2003
-
[18]
SVD-based Kalman Filter Derivative Computation
Tsyganova, Julia V., and Maria V. Kulikova. "SVD-based Kalman Filter Derivative Computation." IEEE Transactions on Automatic Control (2017)
work page 2017
-
[19]
The unscented Kalman filter for nonlinear estimation
Wan, Eric A., and Rudolph Van Der Merwe. "The unscented Kalman filter for nonlinear estimation." Adaptive Systems for Signal Processing, Communications, and Control Symposium 2000. AS -SPCC. The IEEE
work page 2000
-
[20]
Industrial applications of the Kalman filter: A review
Auger, François, et al. "Industrial applications of the Kalman filter: A review." IEEE Transactions on Indust rial Electronics 60.12 (2013): 5458-5471
work page 2013
-
[21]
Foo, Gilbert Hock Beng, Xinan Zhang, and D. Mahinda Vilathgamuwa. "A sensor fault detection and isolation method in interior permanent - magnet synchronous motor drives based on an extended Kalman filter." IEEE Transactions on Industrial Electronics 60.8 (2013): 3485 - 3495
work page 2013
-
[22]
Accurate numerical implementation of the continuous -discrete extended Kalman filter
Kulikov, Gennady Yu, and Maria V. Kulikova. "Accurate numerical implementation of the continuous -discrete extended Kalman filter." IEEE Transactions on Automatic Control 59.1 (2014): 273-279
work page 2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.