Semantic-Aware Autonomous Exploration for UAVs in Unknown Indoor Environments
Pith reviewed 2026-06-26 10:06 UTC · model grok-4.3
The pith
A semantic reward function added to probabilistic roadmaps lets UAVs reach 90-94 percent coverage in less time than geometry-only planners.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
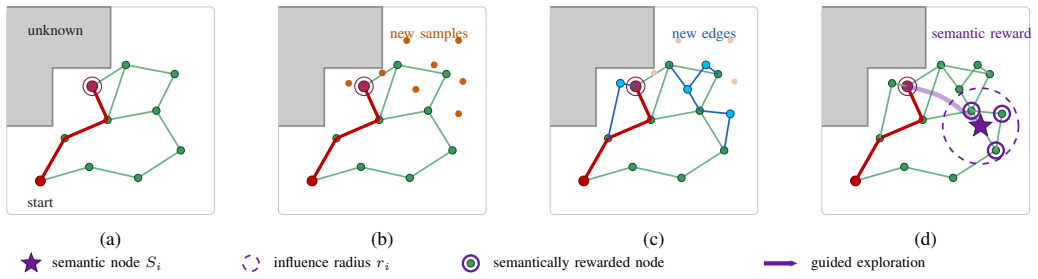
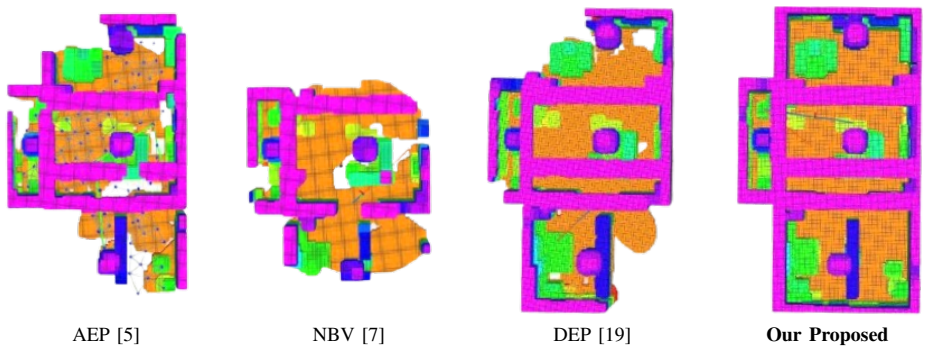
By layering semantic information onto the incrementally built Probabilistic Roadmap and scoring candidate frontiers with a semantic reward, the UAV selects paths that prioritize high-value regions, yielding exploration coverage between 90 and 94 percent together with shorter total travel distance and lower elapsed time than conventional geometry-based methods.
What carries the argument
The semantic reward function layered on top of the Dynamic Exploration Planner's Probabilistic Roadmap, which scores frontiers according to the presence of meaningful objects detected by the RGB-D sensor.
If this is right
- Frontier selection becomes biased toward object-rich zones rather than uniform geometric boundaries.
- The continuously updated roadmap supports repeated replanning without restarting the entire structure.
- Simultaneous geometric and semantic mapping occurs from a single sensor stream.
- Exploration time and distance both decrease in indoor test scenes compared with geometry-only planners.
Where Pith is reading between the lines
- The resulting map may contain more immediately usable object annotations for downstream tasks such as search or manipulation.
- If sensor noise increases in real flights the same reward could produce incomplete coverage that a pure geometric planner would avoid.
- Energy savings from shorter paths could extend mission duration on battery-powered platforms.
- The method could be combined with existing semantic SLAM pipelines to refine labels on the fly.
Load-bearing premise
Semantic labels supplied by the RGB-D sensor are accurate enough that the added reward term improves information gain without leaving coverage gaps or distorting frontier selection.
What would settle it
A controlled run in which the semantic labels contain realistic noise or the reward produces visibly missed rooms while the geometry-only baseline still reaches higher coverage.
Figures
read the original abstract
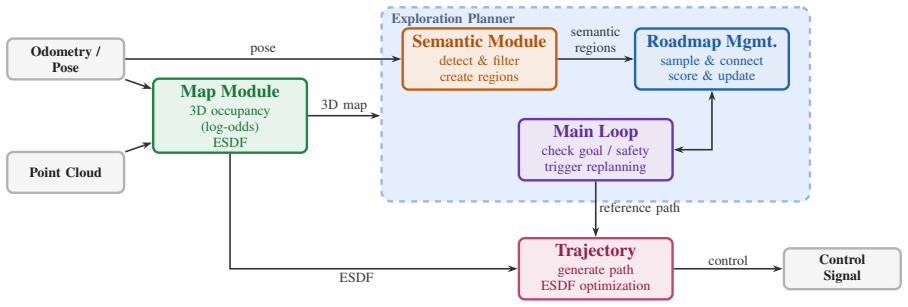
Autonomous exploration in unknown environments requires unmanned aerial vehicles (UAVs) to efficiently generate informative trajectories while simultaneously constructing accurate maps. Although many existing exploration methods rely on geometric information, they often lack semantic awareness, resulting in suboptimal exploration efficiency and limited environmental understanding. To address this limitation, this paper proposes a semantic-aware exploration framework that adds semantic information to a roadmap-based exploration strategy. The proposed method builds on the Dynamic Exploration Planner (DEP), which incrementally constructs a Probabilistic Roadmap (PRM), and augments this roadmap with a semantic layer. A semantic reward function is introduced to prioritize regions containing meaningful objects and structures, enabling the UAV to focus on areas with higher information value. Furthermore, the roadmap is continuously updated to support efficient frontier selection and path planning during exploration. The proposed framework is implemented in ROS Noetic and Gazebo using an RGB-D sensor for simultaneous acquisition of geometric and semantic information. Experimental results in multiple simulated environments demonstrate that the proposed approach achieves exploration coverage rates between 90% and 94% while reducing exploration time and travel distance compared with conventional geometry-based exploration methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a semantic-aware exploration framework for UAVs that augments the Dynamic Exploration Planner (DEP) by adding a semantic layer to its Probabilistic Roadmap (PRM) construction. A semantic reward function is introduced to prioritize regions containing meaningful objects and structures detected via RGB-D sensors. The approach is implemented in ROS Noetic and Gazebo, with the roadmap continuously updated for frontier selection and path planning. The central empirical claim is that the method achieves 90-94% exploration coverage in simulated indoor environments while reducing time and travel distance relative to conventional geometry-based baselines.
Significance. If the performance claims hold under rigorous validation, the work would offer a practical extension of roadmap-based planners like DEP by incorporating semantic information, potentially improving exploration efficiency and map utility in indoor UAV tasks. The explicit use of standard ROS/Gazebo tooling and incremental PRM updates constitutes a reproducible implementation strength that facilitates follow-on work. However, the current presentation leaves the magnitude of any semantic-driven gains unquantified.
major comments (2)
- [Abstract] Abstract: The central claims of 90-94% coverage rates together with reductions in exploration time and travel distance are stated without reference to any data table, figure, error bars, number of trials, or baseline quantitative metrics, rendering the empirical contribution unverifiable from the supplied evidence.
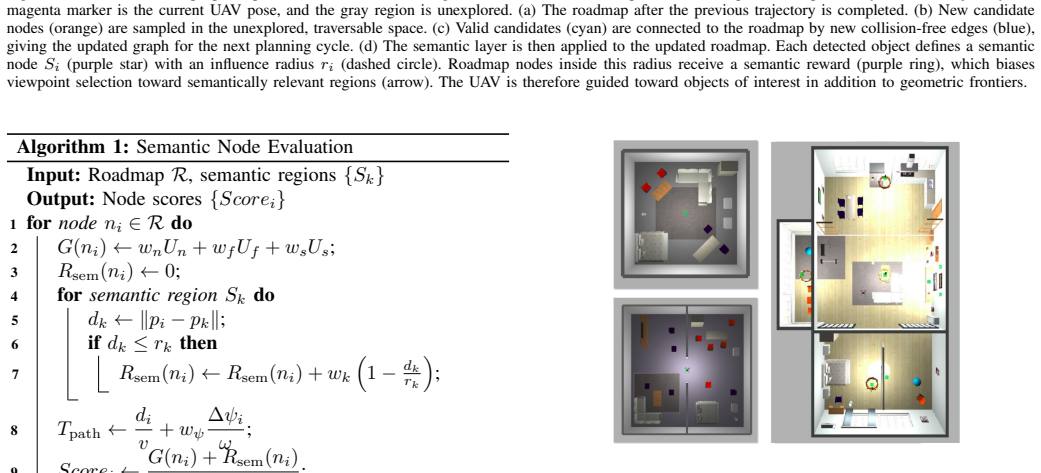
- [Method] Method/Results: The semantic reward function is introduced solely by its intended effect on information value and frontier selection; no explicit equation, weighting scheme, or independent derivation is supplied, creating a circularity between the reward definition and the metric it is claimed to improve.
minor comments (1)
- [Implementation] The description of RGB-D semantic label acquisition would benefit from explicit mention of the semantic segmentation model or label set used.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. We address each major comment below and indicate the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claims of 90-94% coverage rates together with reductions in exploration time and travel distance are stated without reference to any data table, figure, error bars, number of trials, or baseline quantitative metrics, rendering the empirical contribution unverifiable from the supplied evidence.
Authors: We agree that the abstract should enable verification of the stated performance claims. In the revised version we will update the abstract to explicitly reference the experimental results section, the relevant figures and tables (including error bars where applicable), the number of independent trials, and the geometry-based baselines used for comparison. revision: yes
-
Referee: [Method] Method/Results: The semantic reward function is introduced solely by its intended effect on information value and frontier selection; no explicit equation, weighting scheme, or independent derivation is supplied, creating a circularity between the reward definition and the metric it is claimed to improve.
Authors: We acknowledge that an explicit formulation is required. The revised method section will include the mathematical definition of the semantic reward function, the weighting parameters, and the derivation that links semantic labels obtained from the RGB-D sensor to the information-value term used in frontier selection. revision: yes
Circularity Check
No significant circularity
full rationale
The manuscript presents an empirical engineering contribution: it augments an existing DEP/PRM planner with a semantic reward layer, implements the system in ROS/Gazebo, and reports simulation coverage and timing results. No derivation chain, uniqueness theorem, or first-principles prediction is claimed; the reported 90-94 % coverage figures are direct experimental measurements, not quantities obtained by algebraic reduction or by fitting the same metric the reward is defined to optimize. The semantic reward is an explicit design choice whose effect is measured separately, satisfying the self-contained criterion.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Safe search and rescue operations based on autonomous robots: A systematic review of the general system architecture,
A. A. Kareem, A. J. Abid, D. A. Hammood, A. Al-Naji, and J. Chahl, “Safe search and rescue operations based on autonomous robots: A systematic review of the general system architecture,”IEEE Access, 2026
2026
-
[2]
Search and rescue operations in wildfires using unmanned aerial vehicles: A multi-agent deep reinforcement learning approach,
M. Collignon, A. Perrusqu ´ıa, A. Tsourdos, and W. Guo, “Search and rescue operations in wildfires using unmanned aerial vehicles: A multi-agent deep reinforcement learning approach,”Neurocomputing, p. 131211, 2025
2025
-
[3]
Autonomous exploration in unknown urban environments for unmanned aerial vehicles,
D. Shim, H. Chung, H. J. Kim, and S. Sastry, “Autonomous exploration in unknown urban environments for unmanned aerial vehicles,” inAIAA Guidance, Navigation, and Control Conference and Exhibit, 2005, p. 6478
2005
-
[4]
Combining autonomous exploration, goal-oriented coordination and task allocation in multi-uav scenarios,
C. Rasche, C. Stern, W. Richert, L. Kleinjohann, and B. Kleinjohann, “Combining autonomous exploration, goal-oriented coordination and task allocation in multi-uav scenarios,” in2010 Sixth International Conference on Autonomic and Autonomous Systems. IEEE, 2010, pp. 52–57
2010
-
[5]
Efficient autonomous exploration planning of large-scale 3-d environments,
M. Selin, M. Tiger, D. Duberg, F. Heintz, and P. Jensfelt, “Efficient autonomous exploration planning of large-scale 3-d environments,” IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1699–1706, 2019
2019
-
[6]
Fuel: Fast uav exploration using incremental frontier structure and hierarchical planning,
B. Zhou, Y . Zhang, X. Chen, and S. Shen, “Fuel: Fast uav exploration using incremental frontier structure and hierarchical planning,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 779–786, 2021
2021
-
[7]
Receding horizon
A. Bircher, M. Kamel, K. Alexis, H. Oleynikova, and R. Siegwart, “Receding horizon” next-best-view” planner for 3d exploration,” in 2016 IEEE international conference on robotics and automation (ICRA). IEEE, 2016, pp. 1462–1468
2016
-
[8]
Tare: A hierarchical frame- work for efficiently exploring complex 3d environments
C. Cao, H. Zhu, H. Choset, and J. Zhang, “Tare: A hierarchical frame- work for efficiently exploring complex 3d environments.” inRobotics: Science and Systems, vol. 5, 2021, p. 2
2021
-
[9]
T-prm: Temporal probabilistic roadmap for path planning in dynamic environments,
M. H ¨uppi, L. Bartolomei, R. Mascaro, and M. Chli, “T-prm: Temporal probabilistic roadmap for path planning in dynamic environments,” in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 10 320–10 327
2022
-
[10]
Fsmp: A frontier-sampling-mixed planner for fast autonomous exploration of complex and large 3-d environments,
S. Zhang, X. Zhang, Q. Dong, Z. Wang, H. Xi, and J. Yuan, “Fsmp: A frontier-sampling-mixed planner for fast autonomous exploration of complex and large 3-d environments,”IEEE Transactions on Instrumen- tation and Measurement, 2025
2025
-
[11]
Deep reinforce- ment learning-based large-scale robot exploration,
Y . Cao, R. Zhao, Y . Wang, B. Xiang, and G. Sartoretti, “Deep reinforce- ment learning-based large-scale robot exploration,”IEEE Robotics and Automation Letters, vol. 9, no. 5, pp. 4631–4638, 2024
2024
-
[12]
Octomap: An efficient probabilistic 3d mapping framework based on octrees,
A. Hornung, K. M. Wurm, M. Bennewitz, C. Stachniss, and W. Burgard, “Octomap: An efficient probabilistic 3d mapping framework based on octrees,”Autonomous Robots, vol. 34, no. 3, pp. 189–206, 2013
2013
-
[13]
Semantics- aware receding horizon planner for object-centric active mapping,
L. Lu, Y . Zhang, P. Zhou, J. Qi, Y . Pan, C. Fu, and J. Pan, “Semantics- aware receding horizon planner for object-centric active mapping,”IEEE Robotics and Automation Letters, vol. 9, no. 4, pp. 3838–3845, 2024
2024
-
[14]
Semantics-aware exploration and inspection path planning,
M. Dharmadhikari and K. Alexis, “Semantics-aware exploration and inspection path planning,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 3360–3367
2023
-
[15]
Finding things in the unknown: Semantic object-centric exploration with an mav,
S. Papatheodorou, N. Funk, D. Tzoumanikas, C. Choi, B. Xu, and S. Leutenegger, “Finding things in the unknown: Semantic object-centric exploration with an mav,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 3339–3345
2023
-
[16]
Semantic octree mapping and Shannon mutual information computation for robot exploration,
A. Asgharivaskasi and N. Atanasov, “Semantic octree mapping and Shannon mutual information computation for robot exploration,”IEEE Transactions on Robotics, 2023
2023
-
[17]
A frontier-based approach for autonomous exploration,
B. Yamauchi, “A frontier-based approach for autonomous exploration,” inProceedings 1997 IEEE International Symposium on Computational Intelligence in Robotics and Automation CIRA’97. ’Towards New Com- putational Principles for Robotics and Automation’. IEEE, 1997, pp. 146–151
1997
-
[18]
A survey of path planning of industrial robots based on rapidly exploring random trees,
S. Luo, M. Zhang, Y . Zhuang, C. Ma, and Q. Li, “A survey of path planning of industrial robots based on rapidly exploring random trees,” Frontiers in Neurorobotics, vol. 17, p. 1268447, 2023
2023
-
[19]
Autonomous uav exploration of dynamic environments via incremental sampling and probabilistic roadmap,
Z. Xu, D. Deng, and K. Shimada, “Autonomous uav exploration of dynamic environments via incremental sampling and probabilistic roadmap,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2729–2736, 2021
2021
-
[20]
Sampling-based algorithms for optimal motion planning,
S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,”The international journal of robotics research, vol. 30, no. 7, pp. 846–894, 2011
2011
-
[21]
Autonomous exploration method for fast unknown environment mapping by using uav equipped with limited fov sensor,
Y . Zhao, L. Yan, H. Xie, J. Dai, and P. Wei, “Autonomous exploration method for fast unknown environment mapping by using uav equipped with limited fov sensor,”IEEE Transactions on Industrial Electronics, vol. 71, no. 5, pp. 4933–4943, 2023
2023
-
[22]
Real-time volumetric-semantic exploration and map- ping: An uncertainty-aware approach,
R. P. De Figueiredo, J. le Fevre Sejersen, J. G. Hansen, M. Brand ˜ao, and E. Kayacan, “Real-time volumetric-semantic exploration and map- ping: An uncertainty-aware approach,” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021, pp. 9064–9070
2021
-
[23]
Heuristic-based incre- mental probabilistic roadmap for efficient uav exploration in dynamic environments,
Z. Xu, C. Suzuki, X. Zhan, and K. Shimada, “Heuristic-based incre- mental probabilistic roadmap for efficient uav exploration in dynamic environments,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 11 832–11 838
2024
-
[24]
S3m: Semantic segmentation sparse mapping for uavs with rgb-d cam- era,
T. N. Canh, V .-T. Nguyen, X. HoangVan, A. Elibol, and N. Y . Chong, “S3m: Semantic segmentation sparse mapping for uavs with rgb-d cam- era,” in2024 IEEE/SICE International Symposium on System Integration (SII). IEEE, 2024, pp. 899–905
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.