Perceived Safety of Workers in Encounters with Large Industrial AGVs
Pith reviewed 2026-05-22 04:04 UTC · model grok-4.3
The pith
Industrial workers perceive slightly higher threat from large AGVs in VR but prefer 1.5 to 2 meter passing distances in both real and virtual settings.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In a within-subject study with industrial workers, threat levels were perceived overall slightly higher in VR, yet the passing distance of 1.5 to 2 meters was preferred among the demonstrated profiles as well as in the self-defined trajectories.
What carries the argument
Within-subject study comparing real-world and VR encounters using a handheld pressure-sensitive trigger for threat measurement and post-experiment questionnaires, with participants also defining their own collision avoidance trajectories.
If this is right
- AGV navigation systems can use 1.5 to 2 meter passing distances as a baseline for worker comfort in shared factory spaces.
- Virtual reality serves as a useful but imperfect proxy for real safety perception studies, with a slight overestimation of threat.
- Future designs should incorporate input from actual industrial workers rather than relying solely on student participants.
- Self-defined avoidance parameters based on demonstrated profiles can help tailor AGV behavior to individual preferences.
Where Pith is reading between the lines
- Physiological monitoring could be tested alongside the trigger method to validate threat measurements in both environments.
- The preference for specific distances might inform updates to safety standards for AGV operations near humans.
- Similar studies could explore other factors like AGV speed or payload size to build a fuller picture of perceived safety.
Load-bearing premise
The handheld pressure-sensitive trigger and post-experiment questionnaire provide a valid and comparable measure of perceived threat across real-world and VR conditions.
What would settle it
Conducting the same study but using heart rate variability or other biometric sensors to measure threat, and finding that threat levels are not higher in VR or that preferred distances differ substantially.
Figures
read the original abstract
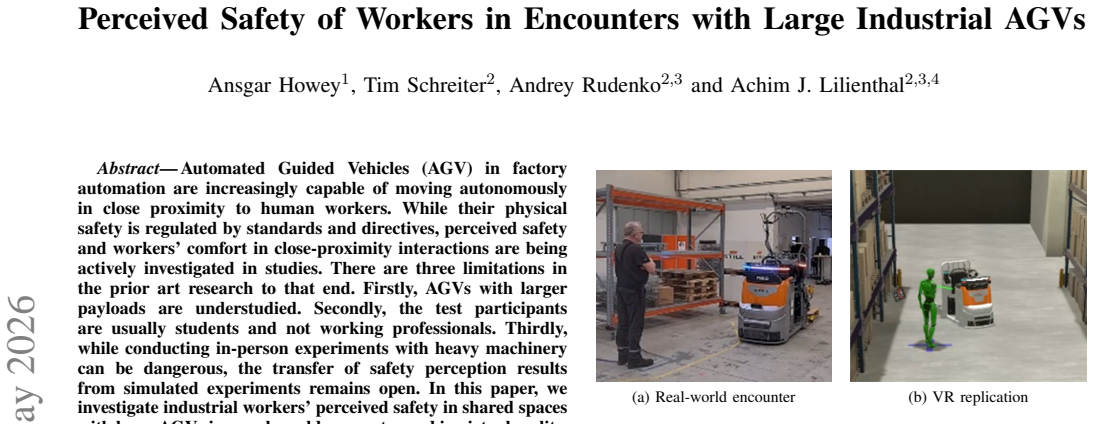
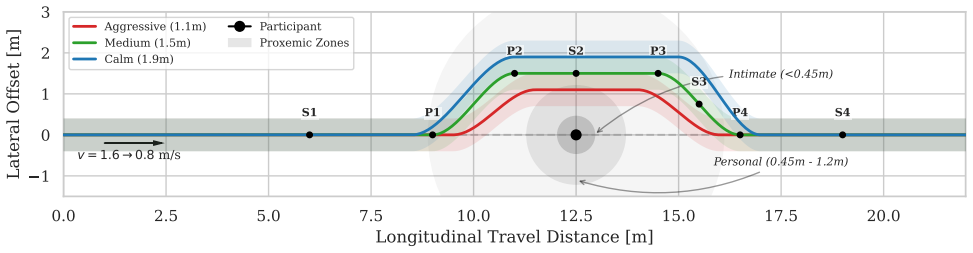
Automated Guided Vehicles (AGV) in factory automation are increasingly capable of moving autonomously in close proximity to human workers. While their physical safety is regulated by standards and directives, perceived safety and workers comfort in close-proximity interactions are being actively investigated in studies. There are three limitations in the prior art research to that end. Firstly, AGVs with larger payloads are understudied. Secondly, the test participants are usually students and not working professionals. Thirdly, while conducting in-person experiments with heavy machinery can be dangerous, the transfer of safety perception results from simulated experiments remains open. In this paper, we investigate industrial workers perceived safety in shared spaces with large AGVs in a real-world encounter and in virtual reality. We vary the passing distance and the shape of the collision avoidance maneuver, and evaluate perceived threat level using a handheld pressure-sensitive trigger interface and a post-experiment questionnaire. Additionally, we ask participants to set their own collision avoidance parameters based on their experience with the demonstrated trajectory profiles. In a within-subject study, we found that, while the threat levels are perceived overall slightly higher in VR, the passing distance of 1.5 to 2 meters is preferred among the demonstrated profiles, as well as in the self-defined trajectories.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
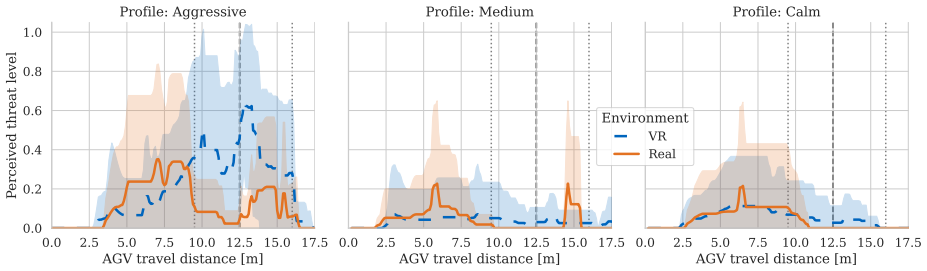
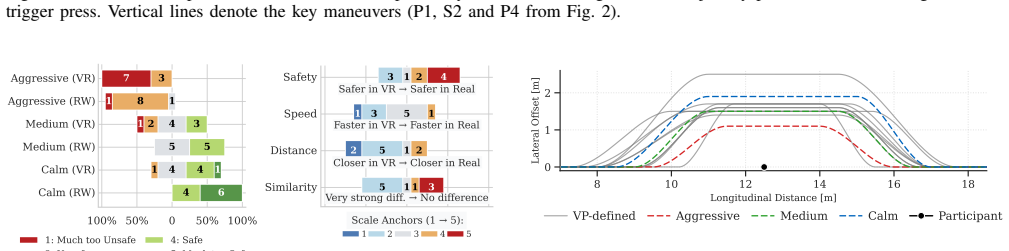
Summary. The manuscript reports a within-subject study with industrial workers comparing perceived threat levels in encounters with large industrial AGVs under real-world and VR conditions. Passing distance and collision-avoidance maneuver shape are varied; threat is measured via a handheld pressure-sensitive trigger (continuous) and a post-experiment questionnaire. The central findings are that threat is perceived overall slightly higher in VR, yet the 1.5–2 m passing distance is preferred both among the demonstrated profiles and in participants’ self-defined trajectories.
Significance. If the cross-condition measurement equivalence holds, the work supplies useful empirical data on perceived safety for professional operators rather than students and for large-payload AGVs, two under-studied areas. The inclusion of self-defined trajectories and the dual real/VR design are practical strengths that could inform industrial safety standards and HRI interface design.
major comments (1)
- [evaluation method] Evaluation method (abstract and method description): The central comparative claim—that threat levels are “overall slightly higher in VR”—rests on the untested assumption that the pressure-sensitive trigger and questionnaire produce interval-scale, cross-condition equivalent scores. The real-world condition introduces genuine collision risk, vestibular/auditory differences, and possible demand characteristics absent in VR. No calibration, concurrent validity against an established scale, or measurement-invariance tests are reported, so the observed delta cannot be isolated from instrument artifacts.
minor comments (2)
- [abstract] Abstract: sample size, statistical tests, and any error bars or confidence intervals are omitted, preventing readers from gauging the reliability of the “slightly higher” difference.
- [abstract] Abstract, first sentence of results: “industrial workers perceived safety” should read “industrial workers’ perceived safety.”
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We address the major comment regarding the evaluation method below, acknowledging the valid concerns about cross-condition measurement equivalence while defending the robustness of our primary findings on preferred passing distances.
read point-by-point responses
-
Referee: [evaluation method] Evaluation method (abstract and method description): The central comparative claim—that threat levels are “overall slightly higher in VR”—rests on the untested assumption that the pressure-sensitive trigger and questionnaire produce interval-scale, cross-condition equivalent scores. The real-world condition introduces genuine collision risk, vestibular/auditory differences, and possible demand characteristics absent in VR. No calibration, concurrent validity against an established scale, or measurement-invariance tests are reported, so the observed delta cannot be isolated from instrument artifacts.
Authors: We agree that the 'slightly higher in VR' observation must be interpreted with caution, as the referee correctly identifies potential differences in sensory feedback, actual risk, and demand characteristics between conditions. The pressure-sensitive trigger was intended as a continuous, low-interference measure of perceived threat, paired with a post-experiment questionnaire for triangulation. No formal calibration or invariance testing was performed. In the revised version we have expanded the Limitations section to explicitly discuss these factors and have qualified the comparative claim as tentative rather than definitive. However, the central practical result—that participants preferred passing distances of 1.5–2 m—does not depend on cross-condition score equivalence; it is supported by consistent patterns in both the demonstrated profiles and the self-defined trajectories collected in each setting. revision: partial
Circularity Check
Empirical study reports direct participant data with no derivations or modeling
full rationale
The paper describes a within-subject human-subject experiment that collects perceived threat levels via a handheld pressure-sensitive trigger and post-experiment questionnaires, then reports observed preferences for passing distances and self-defined trajectories. No equations, fitted parameters, predictive models, or derivation chains appear in the provided text. Claims rest on raw participant responses rather than any self-referential construction, self-citation load-bearing premise, or ansatz smuggled through prior work. This is a standard empirical report whose central findings are independent of the circularity patterns enumerated in the analysis criteria.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
J. M. Haney and C.-J. Liang, “A literature review on safety perception and trust during human–robot interaction with autonomous mobile robots that apply to industrial environments,”IISE transactions on occupational ergonomics and human factors, 2024
work page 2024
-
[2]
European Parliament and Council, “Directive 2006/42/ec of the euro- pean parliament and of the council of 17 may 2006 on machinery, and amending directive 95/16/ec (recast),”Official Journal of the European Union, vol. L157, pp. 24–86, may 2006. [3]Industrial trucks — Safety requirements and verification — Part 4: Driverless industrial trucks and their sy...
work page 2006
-
[3]
Interactions between workers and automated guided vehicles: Impact of ehmi design,
D. W. Han, S. Bhat, S. Yang, J. Smith, A. Salour, T. Stroup, P. Pridham, Y . Liu, and X. J. Yang, “Interactions between workers and automated guided vehicles: Impact of ehmi design,” inProceedings of the Human Factors and Ergonomics Society Annual Meeting, vol. 69, no. 1. SAGE Publications Sage CA: Los Angeles, CA, 2025, pp. 1166–1172
work page 2025
-
[4]
User experience of automated guided vehicles,
Howey and F. van der Anker, “User experience of automated guided vehicles,” inBericht zum 69. Arbeitswissenschaftlichen Kongress, Hannover, Germany, 2023, b.6.4
work page 2023
-
[5]
Design of visible and audible signals of driverless industrial trucks,
A. Scherb, “Design of visible and audible signals of driverless industrial trucks,”Verband Deutscher Maschinen- und Anlagenbau (VDMA), 2023
work page 2023
-
[6]
Proxemics [and comments and replies],
E. T. Hall, R. L. Birdwhistell, B. Bock, P. Bohannan, A. R. Diebold Jr, M. Durbin, M. S. Edmonson, J. Fischer, D. Hymes, S. T. Kimballet al., “Proxemics [and comments and replies],”Current anthropology, vol. 9, no. 2/3, pp. 83–108, 1968
work page 1968
-
[7]
R. Wiczorek and J. Protzak, “Evaluation of an assistance system supporting older pedestrians’ road crossing in virtual reality and in a real-world field test,”Frontiers in Psychology, Dec 2022
work page 2022
-
[8]
P. Maruhn, “Vr pedestrian simulator studies at home: Comparing google cardboards to simulators in the lab and reality,”Frontiers in Virtual Reality, vol. 2, p. 746971, 2021
work page 2021
-
[9]
Virtually the same? analysing pedestrian behaviour by means of virtual reality,
S. Schneider and K. Bengler, “Virtually the same? analysing pedestrian behaviour by means of virtual reality,”Transportation Research Part F: Traffic Psychology and Behaviour, pp. 231–256, 2020
work page 2020
-
[10]
Perceived safety during human-robot interaction with an autonomous mobile robot,
J. M. Haney, D. Ammons, and H. Choi, “Perceived safety during human-robot interaction with an autonomous mobile robot,”Applied Ergonomics, vol. 135, p. 104747, 2026. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S0003687026000256
work page 2026
-
[11]
S. Brill, W. Payre, A. Debnath, B. Horan, and S. Birrell, “External human–machine interfaces for automated vehicles in shared spaces: A review of the human–computer interaction literature,”Sensors, vol. 23, no. 9, p. 4454, 2023
work page 2023
-
[12]
Comparing human-robot proxemics between virtual reality and the real world,
R. Li, M. van Almkerk, S. van Waveren, E. Carter, and I. Leite, “Comparing human-robot proxemics between virtual reality and the real world,” in2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2019, pp. 431–439
work page 2019
-
[13]
J. Plomin, P. Schweidler, and A. Oehme, “Virtual reality check: a comparison of virtual reality, screen-based, and real world settings as research methods for hri,”Frontiers in Robotics and AI, 2023
work page 2023
-
[14]
F. Legler, J. Trezl, D. Langer, M. Bernhagen, A. Dettmann, and A. C. Bullinger, “Emotional experience in human–robot collaboration: suitability of virtual reality scenarios to study interactions beyond safety restrictions,”Robotics, vol. 12, no. 6, p. 168, 2023
work page 2023
-
[15]
Virtual studies, real results? assessing the impact of virtualization on human- robot interaction,
T. Mielke, M. Allgaier, D. Schott, C. Hansen, and F. Heinrich, “Virtual studies, real results? assessing the impact of virtualization on human- robot interaction,” inProceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, 2025
work page 2025
-
[16]
Virtually the same or realistically different?: A meta-analysis of real vs.‘not so real’robots,
C. Esterwood, R. H. Guan, X. Ye, and L. P. Robert, “Virtually the same or realistically different?: A meta-analysis of real vs.‘not so real’robots,” inProceedings of the 20th ACM/IEEE HRI, 2025
work page 2025
-
[17]
External human-machine interfaces on automated vehicles: Effects on pedestrian crossing decisions,
K. De Clercq, A. Dietrich, J. P. N ´u˜nez Velasco, J. De Winter, and R. Happee, “External human-machine interfaces on automated vehicles: Effects on pedestrian crossing decisions,”Human factors, vol. 61, no. 8, pp. 1353–1370, 2019
work page 2019
-
[18]
P. Bazilinskyy, L. Kooijman, D. Dodou, and J. C. de Winter, “How should external human-machine interfaces behave? examining the ef- fects of colour, position, message, activation distance, vehicle yielding, and visual distraction among 1,434 participants,”Applied ergonomics, vol. 95, p. 103450, 2021
work page 2021
-
[19]
Navwareset: A dataset of socially compliant and non- compliant robot navigation,
J. Brayan, S. Deng, A. A. Neto, I. Okunevich, T. Krajnik, F. Bremond, and Z. Yan, “Navwareset: A dataset of socially compliant and non- compliant robot navigation,” 2025
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.