Supervisory control synthesis for multilevel DES with local buses
Pith reviewed 2026-05-25 07:18 UTC · model grok-4.3
The pith
Extending bus detection to every hierarchy level yields a tree-structured multilevel system for efficient supervisor synthesis.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
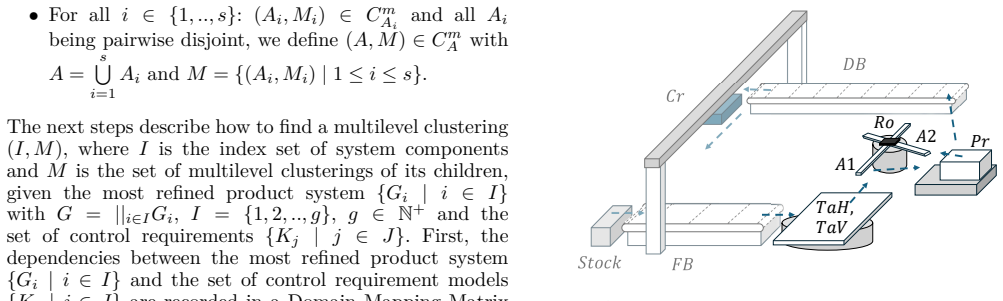
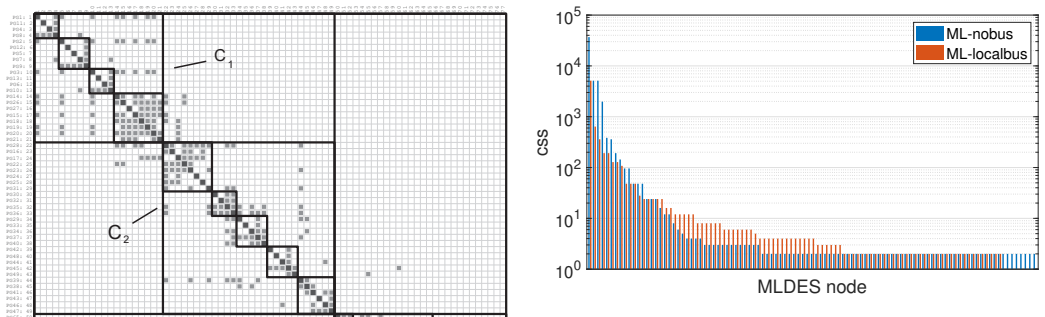
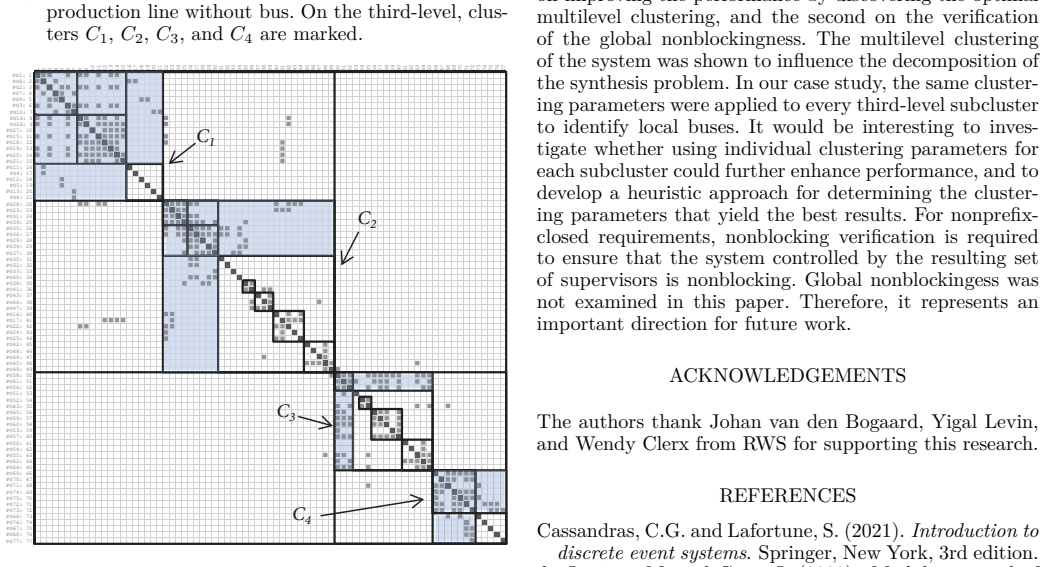
By allowing bus detection not only on the top level but at each level of the system hierarchy, the authors define a novel MLDES architecture. Given this architecture, they introduce an algorithm that constructs a tree-structured MLDES. A case study on a production line shows the effectiveness of the proposed method through significantly improved synthesis performance, measured by the sum of the controlled state-space sizes of the local supervisors.
What carries the argument
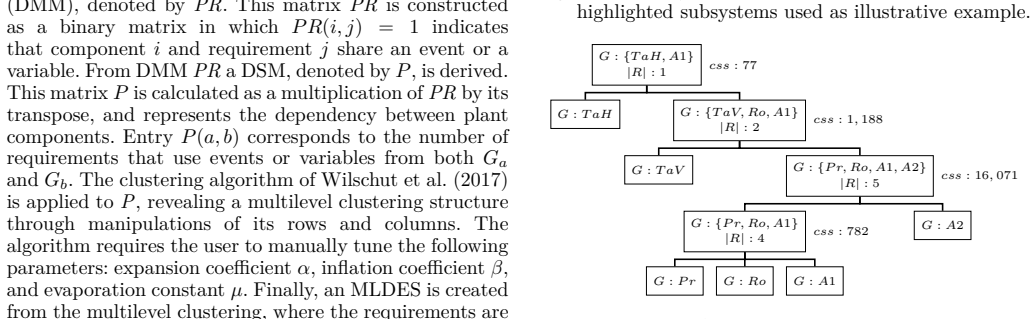
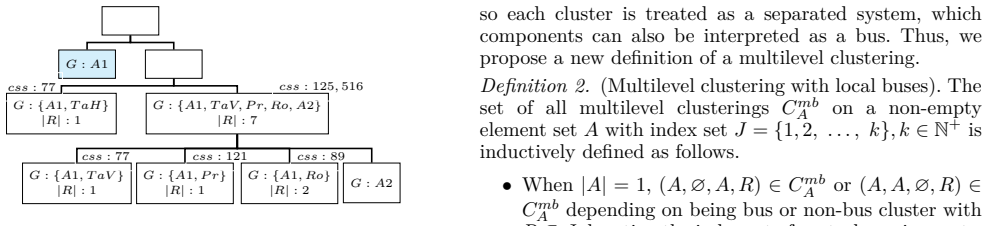
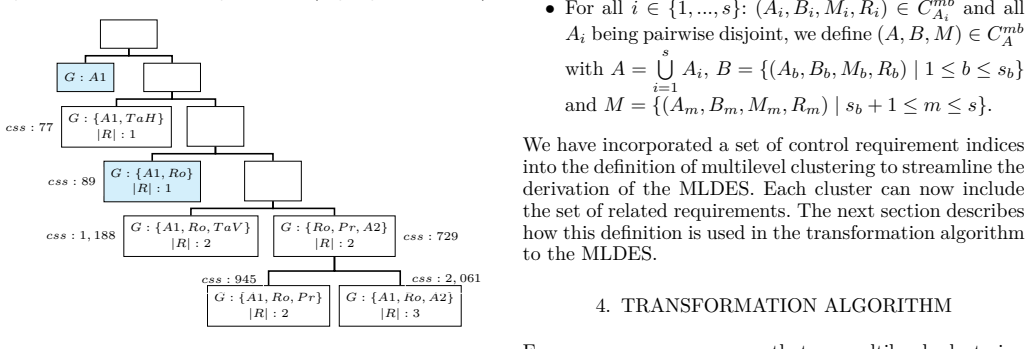
The multilevel discrete-event system (MLDES) architecture with per-level bus detection, which uses dependency structure matrices to produce a tree-structured hierarchical decomposition of plants and requirements.
If this is right
- Local supervisors are synthesized over smaller state spaces because local buses no longer force oversized clusters at higher levels.
- The overall synthesis procedure scales to systems containing multiple bus-like components without exponential growth in any single subproblem.
- The tree structure produced by the algorithm respects both global and local dependencies, allowing independent computation of each local supervisor.
- Performance gains appear directly as reductions in the summed sizes of the controlled state spaces across all local supervisors.
Where Pith is reading between the lines
- The same per-level bus detection could be applied to other manufacturing or logistics plants to test whether state-space reductions remain consistent across domains.
- If the tree can be recomputed incrementally when requirements change, the method might support online supervisor updates without full re-synthesis.
- Combining the architecture with existing modular or decentralized synthesis techniques could compound the state-space savings.
Load-bearing premise
The system admits a hierarchical decomposition in which detecting buses at every level still preserves the clustering benefits of the dependency structure matrix technique.
What would settle it
Apply the synthesis algorithm to the production line example once with only top-level bus detection and once with the new per-level detection; if the sum of controlled state-space sizes is not markedly smaller in the per-level version, the performance claim is false.
Figures


read the original abstract
In multilevel supervisor synthesis, dependency structure matrix techniques can be used to transform the models of plants and requirements into a tree-structured hierarchical decomposition of the synthesis problem and thus efficiently synthesize local supervisors. A bus component, which has many dependencies across a system, tends to lead to an undesirable clustering of many components in one synthesis subproblem. Prior work showed how to recognize and properly treat a global bus structure. In this paper we leverage this work from global to local bus structures through a novel multilevel discrete-event system (MLDES) architecture. Specifically, the hierarchical system decomposition is revisited by allowing bus detection not only on the top level but at each level of the system hierarchy. Given this architecture, an algorithm is introduced that constructs a tree-structured MLDES. A case study on a production line shows the effectiveness of the proposed method through significantly improved synthesis performance, measured by the sum of the controlled state-space sizes of the local supervisors.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper extends dependency structure matrix (DSM) techniques for multilevel discrete-event systems (MLDES) by detecting and handling bus structures at every level of the hierarchy (not only the top level). It introduces an explicit algorithm to construct a tree-structured MLDES and reports a production-line case study in which the sum of the controlled state-space sizes of the resulting local supervisors is significantly smaller than with prior global-bus-only methods.
Significance. If the case-study improvement is reproducible, the work supplies a practical, algorithmic way to obtain finer-grained hierarchical decompositions for supervisory control synthesis when local buses are present. The explicit construction algorithm and the concrete performance metric (sum of controlled state-space sizes) are strengths that make the contribution falsifiable and directly usable by practitioners.
major comments (1)
- [Case study] Case study: the manuscript asserts 'significantly improved synthesis performance' measured by the sum of controlled state-space sizes, yet the provided text supplies no numerical values, baseline comparison, or description of how the local-bus detection was applied at each level. Without these data the central empirical claim cannot be verified.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive feedback. We address the single major comment below and will revise the manuscript to strengthen the empirical presentation.
read point-by-point responses
-
Referee: [Case study] Case study: the manuscript asserts 'significantly improved synthesis performance' measured by the sum of controlled state-space sizes, yet the provided text supplies no numerical values, baseline comparison, or description of how the local-bus detection was applied at each level. Without these data the central empirical claim cannot be verified.
Authors: We agree that the case-study section must supply explicit numerical values, a direct baseline comparison, and a transparent description of the per-level bus detection. The abstract and high-level description in the manuscript state the performance metric but do not tabulate the concrete state-space sizes or walk through the detection steps at each hierarchy level. We will add a table comparing the sum of controlled state-space sizes obtained with the proposed local-bus method against the prior global-bus-only approach, together with a step-by-step account of how local buses were identified and handled at every level of the production-line example. This revision will make the central empirical claim directly verifiable. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper introduces a novel MLDES architecture and construction algorithm that extends prior DSM-based global bus handling to local buses at every hierarchy level. The central result is an explicit algorithmic procedure whose output (tree-structured decomposition) is not defined in terms of its own performance metric; effectiveness is instead shown by an external case-study measurement (sum of controlled state-space sizes of local supervisors). The reference to prior global-bus work is a standard citation of an independent technique and does not serve as a load-bearing uniqueness theorem or self-definitional step inside the present derivation. No fitted parameters, ansatz smuggling, or renaming of known results occur.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Dependency structure matrix techniques can transform the models of plants and requirements into a tree-structured hierarchical decomposition
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the sum of the controlled state-space sizes of the local supervisors
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Cassandras, C.G. and Lafortune, S. (2021). Introduction to discrete event systems . Springer, New York, 3rd edition. de Queiroz, M. and Cury, J. (2000). Modular control of composed systems. In Proceedings of the ACC, volume 6, 4051–4055. doi:10.1109/ACC.2000.876983
-
[2]
Feng, L., Cai, K., and Wonham, W. (2009). A structural approach to the non-blocking supervisory control of discrete-event systems. The IJAMT, 41(11), 1152–1168
work page 2009
-
[3]
Fronczak, J., Fokkink, W., and Rooda, J. (2019). Su- pervisory control of multilevel discrete-event systems with a bus structure. In 18th ECC , 3204–3211. doi: 10.23919/ECC.2019.8795835
- [4]
-
[5]
Komenda, J., Masopust, T., and van Schuppen, J.H. (2013). Multilevel coordination control of modular DES. In 52nd IEEE CDC , 6323–6328. doi:10.1109/CDC.2013. 6760889
-
[6]
Komenda, J., Masopust, T., and van Schuppen, J.H. (2016). Control of an engineering-structured multilevel discrete-event system. In 13th IF AC WODES, 103–108. doi:10.1109/WODES.2016.7497833
- [7]
-
[8]
Ma, C. and Wonham, W. (2005). Nonblocking supervi- sory control of state tree structures. Springer, Berlin, Heidelberg. doi:10.1007/b105592
-
[9]
Markovski, J., Jacobs, K., van Beek, D., Somers, L., and Rooda, J. (2010). Coordination of resources using generalized state-based requirements. IF AC Proceedings Volumes , 43(12), 287–292. doi:10.3182/ 20100830-3-DE-4013.00048. M.M. Baubekova, M.A.G., Reniers, M.A., van de Mortel-
-
[10]
Fronczak, J.M., Rooda, J.E., and Fokkink, W.J. (2025). Cif benchmark models used in the ifac 2026 paper. [Online]. https://github.com/mbaubek/IFAC2026
work page 2025
-
[11]
Mohajerani, S., Malik, R., and Fabian, M. (2016). A framework for compositional nonblocking verification of extended finite-state machines. DEDS, 26(1), 33–84
work page 2016
-
[12]
Ouedraogo, L., Kumar, R., Malik, R., and Akesson, K. (2011). Nonblocking and safe control of discrete-event systems modeled as extended finite automata. IEEE T- ASE, 8(3), 560–569. doi:10.1109/TASE.2011.2124457
-
[13]
Ramadge, P.J. and Wonham, W.M. (1987). Supervisory control of a class of discrete event processes. SIAM journal on control and optimization , 25(1), 206–230
work page 1987
-
[14]
Ramadge, P.J. and Wonham, W. (1982). Supervisory control of discrete event processes. In Feedback Control of Linear and Nonlinear Systems. , 202–214. Springer
work page 1982
-
[15]
Ramadge, P. and Wonham, W. (1989). The control of discrete event systems. Proceedings of the IEEE , 77(1), 81–98. doi:10.1109/5.21072
-
[16]
Reniers, M., and Rooda, J. (2018). Application of dependency structure matrices and multilevel synthesis to a production line. In IEEE CCTA , 458–464. doi: 10.1109/CCTA.2018.8511449
-
[17]
Wilschut, T., Etman, L.F.P., Rooda, J.E., and Adan, I.J.B.F. (2017). Multilevel flow-based markov clustering for design structure matrices. JMD, 139(12), 121402. doi:10.1115/1.4037626
-
[18]
Wonham, M.W. and Cai, K. (2019). Supervisory control of discrete-event systems . Springer, Cham, 1st edition
work page 2019
-
[19]
Wonham, W., Cai, K., and Rudie, K. (2018). Supervi- sory control of discrete-event systems: A brief history. Annual Reviews in Control , 45, 250–256. doi:10.1016/j. arcontrol.2018.03.002
work page doi:10.1016/j 2018
-
[20]
Yoo, T.S. and Lafortune, S. (2002). A general architec- ture for decentralized supervisory control of discrete- event systems. DEDS, 12(3), 335–377. doi:10.1023/ a:1015625600613
work page 2002
-
[21]
Zhong, H. and Wonham, W. (1990). On the consistency of hierarchical supervision in discrete-event systems. IEEE TACON, 35(10), 1125–1134. doi:10.1109/9.58555
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.